一種顧及GNSS系統間偏差的偽距單點定位方法
2016-09-21 02:14:41徐龍威劉玉潔
大地測量與地球動力學 2016年9期
關鍵詞:系統
徐龍威 劉 暉 劉玉潔 舒 寶 張 明 錢 闖
1 武漢大學衛星導航定位技術研究中心,武漢市珞喻路129號,430079 2 河南省遙感測繪院,鄭州市黃河路8號,450003
?
一種顧及GNSS系統間偏差的偽距單點定位方法
徐龍威1劉暉1劉玉潔2舒寶1張明1錢闖1
1武漢大學衛星導航定位技術研究中心,武漢市珞喻路129號,430079 2河南省遙感測繪院,鄭州市黃河路8號,450003
對系統間偏差的成分和影響因素進行分析,發現各項改正后殘余誤差對系統間偏差估值的影響可歸結為與衛星編號和廣播星歷更新相關。提出一種新的顧及參與解算衛星構成的系統間偏差估計方案,新方案能夠在僅有4顆多模GNSS衛星可見時提供可靠的位置服務。
多模GNSS;系統間偏差;衛星編號;定位
對于常規導航用戶,觀測條件較差導致大量觀測誤差被系統間偏差(inter system bias, ISB)吸收[1-2],ISB的穩定性變弱。Montenbruck等[3]在分析CONGO網絡測站性能時,首次提出GPS/Galileo測距碼ISB,并從理論上證明ISB與接收機和測距碼的類型有關。Torre等[2]利用實測數據分別基于精密軌道和廣播星歷分析ISB的變化規律,證明了ISB與接收機類型相關的特性。文獻[4-5]利用ISB短時間內變化不大的特性,將在可見衛星充足歷元求得的ISB作為已知參數,引入可見衛星不足歷元進行系統間的偏差補償,減少觀測模型中未知參數的個數,在損失一定精度的條件下實現了GPS/GLONASS雙系統僅4顆星的定位解算。由于不同衛星觀測誤差的差異明顯且會被ISB吸收,所以不同衛星參與解算會得到不同的ISB估值。因此,在進行系統間偏差補償時,顧及當前歷元可見衛星的觀測誤差,能夠減少Cai等[4]提到的精度損失。
1 系統間偏差構成和影響因素
多模GNSS時空基準和信號硬件延遲等因素的差異都會導致系統間偏差,可利用偽距觀測方程對系統間偏差的構成和影響因素進行推導:
(1)

時空轉換后,常規偽距單點定位誤差模型為:
V=HX+L
(2)
式中,δx、δy、δz為接收機真實坐標與近似坐標之差,dtsys_GR、dtsys_GC、dtsys_GE為以GPS為基準與其他GNSS系統的接收機鐘差參數之差,即系統間碼偏差。此時多種觀測誤差會導致ISB的估值包含時間系統間偏差、軌道誤差、衛星鐘差、對流層延遲、多路徑、接收機硬件延遲以及觀測噪聲之差等。Montenbruck等[6]對GNSS廣播星歷偏差進行分析,廣播星歷SSIRE在m級,同一時刻不同衛星廣播星歷偏差不同,且GLONASS衛星廣播星歷誤差受星歷更新影響具有明顯周期性。大氣延遲和多路徑效應主要與衛星信號傳播路徑相關,可以理解為與衛星編號相關。另外,GLONASS衛星頻率不同,導致不同衛星的信號接收機硬件碼延遲不同[7],也可被當作與衛星編號相關。衛星觀測值的各項觀測誤差都會影響系統間偏差估計,這些誤差都可以視為與衛星編號相關且短時間內變化不大。因此,在估計ISB時顧及衛星編號能夠明顯提高估值對當前歷元的適應性。
ISB的分析基于偽距單點定位數學模型,對流層延遲采用Saastamoinen模型改正,電離層采用消電離層組合(GPSL1/L2,GLONASSL1/L2,BDSB1/B2,GalileoE1/E5a),實驗分析均基于GPST。下文中,G代表GPS,R代表GLONASS,C代表BDS,E代表Galileo。
2 系統間偏差特性分析
2.1GPS作為參考系統合理性分析
本文以GPS為基準系統。不同的GPS衛星參與解算會對ISB估值造成影響,因此,本文利用不同數目的GPS衛星參與解算,分析其對ISB估計的影響。如圖1所示(以G-RISB為例),不同數目的GPS衛星參與解算,ISB估值差異在5ns以內。隨著參與解算的GPS衛星數目的減少,觀測模型的穩健性減弱,ISB穩定性也隨之變差。參與解算的GPS衛星為隨機選取,其他系統可見衛星全部參與解算。總之,不同顆數的GPS衛星參與解算對ISB估值的影響遠小于ISB估值的量級。
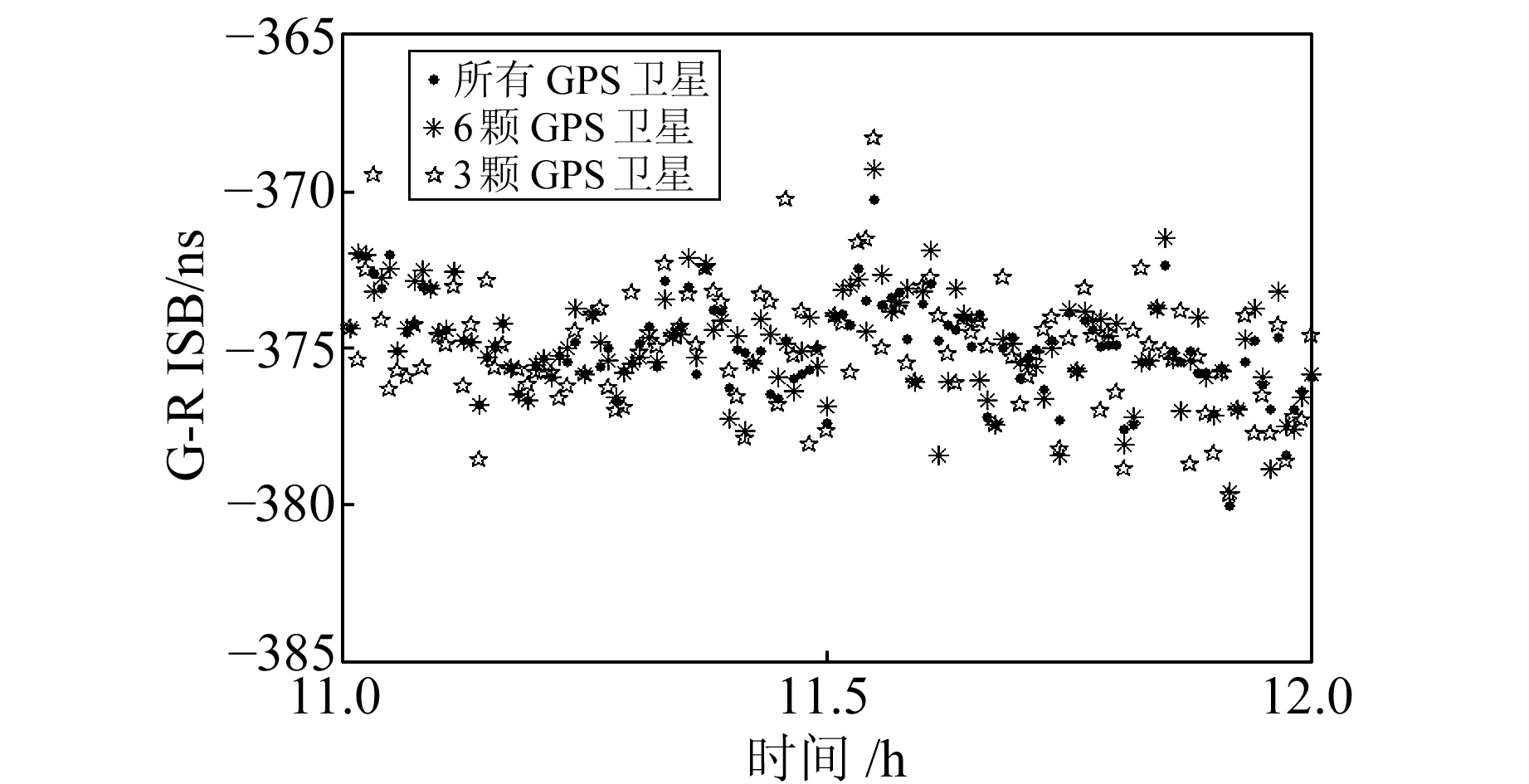
圖1 GPS衛星對ISB的影響Fig.1 The influence of GPS satellite to inter system bias
2.2系統間偏差特性分析
選取6個不同類型接收機的MEGX跟蹤站(表1)2013-11-25的觀測數據,截止高度角設置為10°,采樣間隔30s。
從圖2~4可以看出,ISB與接收機類型相關。對于GLONASS(圖2),ISB比較穩定,24h變化區間在15ns以內,與時間相關性很強,相鄰兩個歷元差異很小。但ISB經常出現跳躍,且發生時刻均為GLONASS廣播星歷更新時刻,可知廣播星歷更新是ISB的重要影響因素。

表1 MEGX站接收機類型以及兼容系統
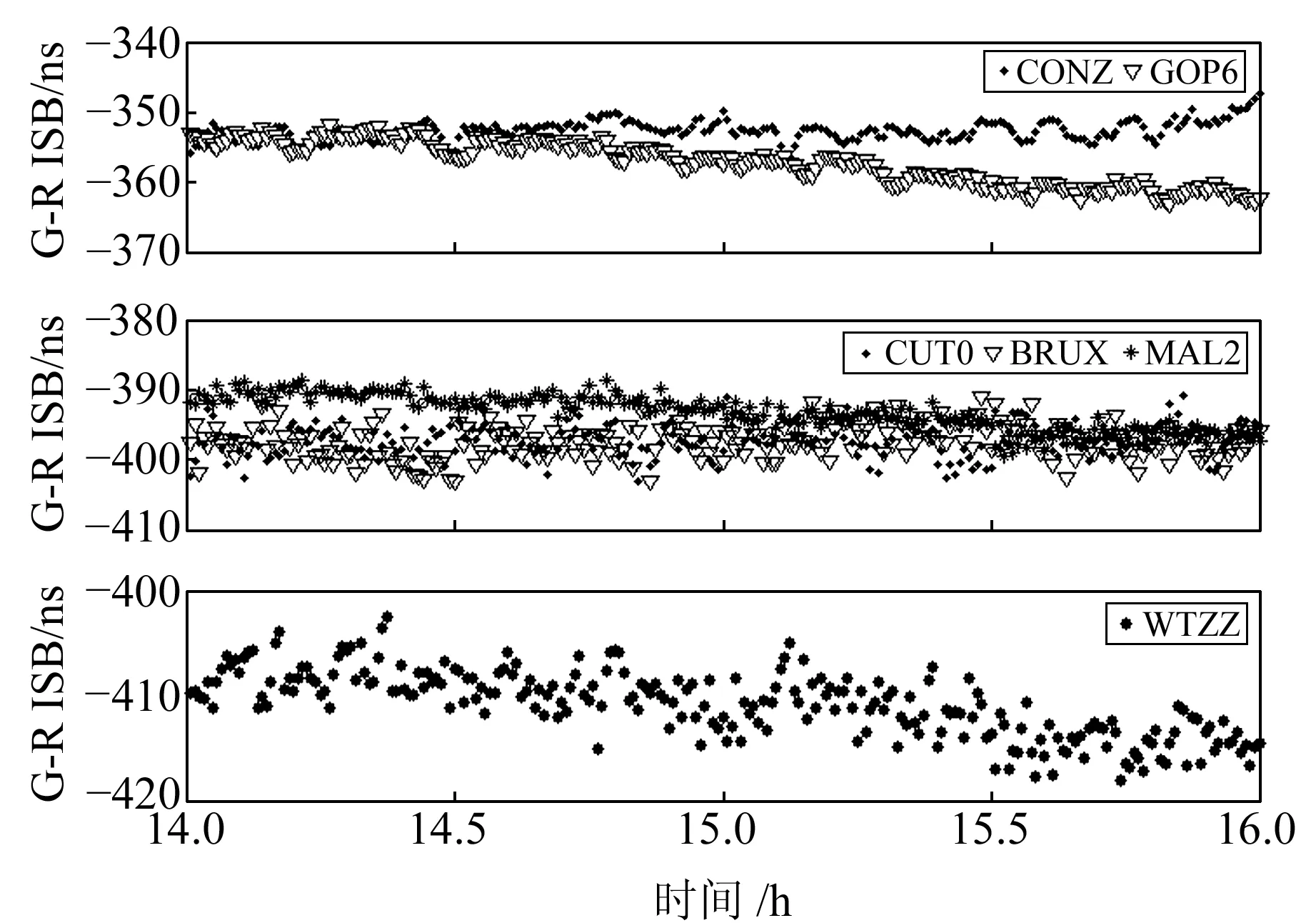
圖2 不同類型接收機獲得觀測值的G-R ISB估值Fig.2 G-R ISB estimates for different types of receiver observations
從圖3看出,所有測站的ISB估值相鄰歷元間差異很小,CUT0和MAL2的ISB穩定性較強。這兩個站ISB穩定性好的主要原因是其可見BDS衛星大于6顆,ISB估值為多顆衛星觀測值的加權平均,衛星數越多穩定性越好。BRUX僅能觀測到3顆左右BDS衛星,導致其ISB穩定性較差。
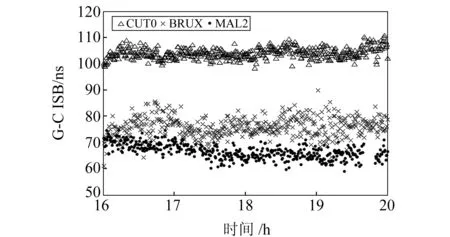
圖3 不同類型接收機獲得觀測值的 G-C ISB估值Fig.3 G-C ISB estimates for different types of receiver observations
如圖4,目前Galileo在軌衛星較少,導致G-E ISB穩定性略差,不同接收機間的ISB差異也十分明顯。
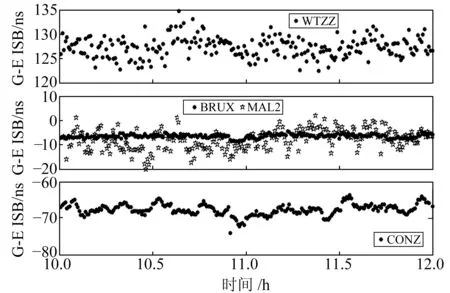
圖4 不同類型接收機獲得觀測值的G-E ISB估值Fig.4 G-E ISB estimates for different types of receiver
2.3單顆衛星對ISB影響分析
對單顆衛星ISB的分析見圖5~7。單顆衛星的ISB估計方法與系統間ISB估計方法類似。以1顆GLONASS衛星的ISB為例,所有GPS衛星+1顆GLONASS衛星解算獲得該顆GLONASS衛星的ISB。
由圖5可知,GLONASS衛星ISB變化與時間相關,具有明顯的周期性,且與廣播星歷更新時間相符。與下文其他GNSS系統相比,不同衛星對應的ISB差異更明顯,R14與R08對應的ISB相差20 ns左右。這主要是由于GLONASS采用頻分多址技術,不同的衛星信號頻率不同,導致接收機硬件延遲差異。
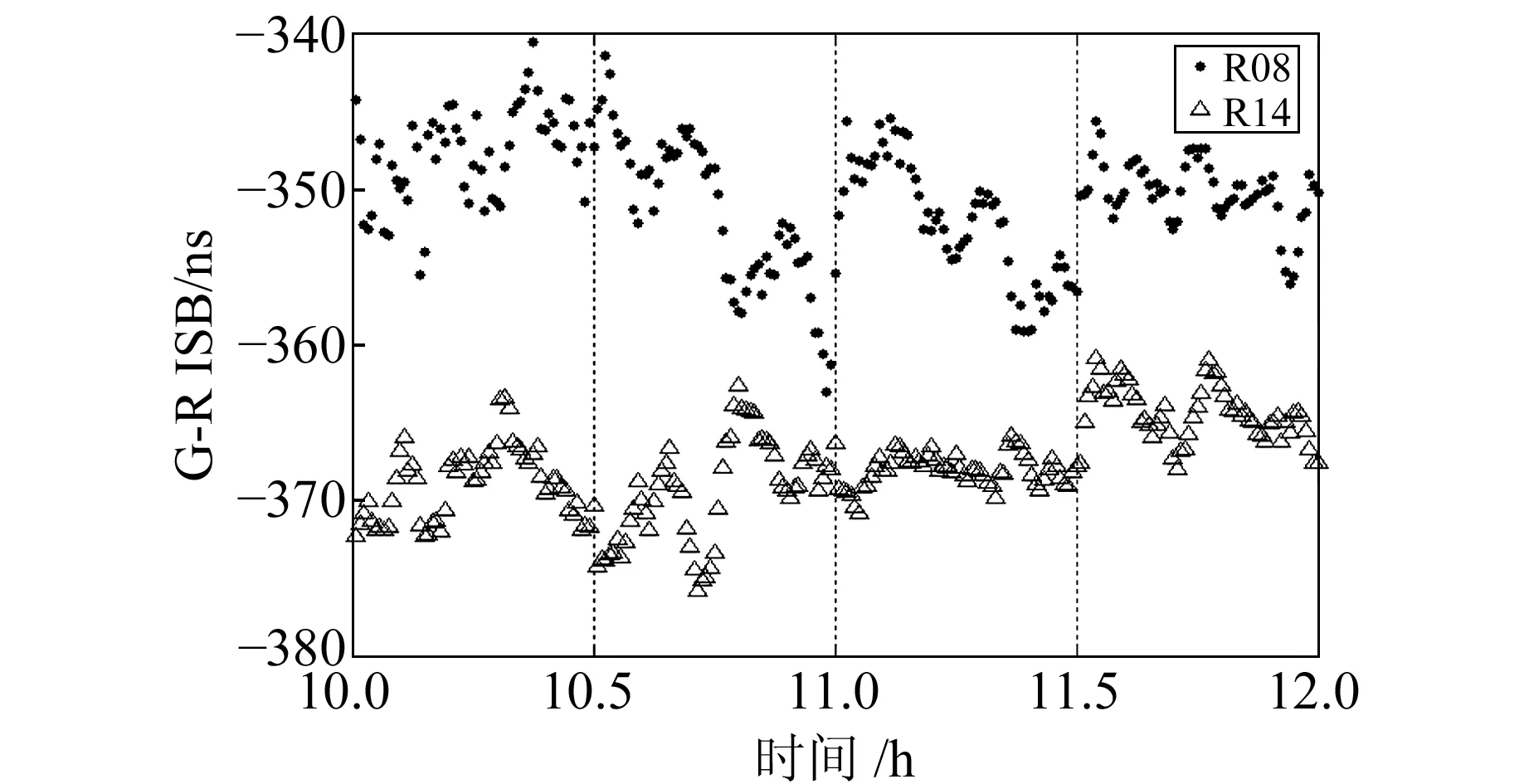
圖5 不同GLONASS衛星G-R ISB(GOP6站)Fig.5 G-R ISB for different GLONASS satellites(GOP6 station)
圖6為不同BDS衛星ISB變化規律,較差穩定且無明顯周期性,但與時間的相關性明顯,星歷歷元估值差異在3 ns以內。當衛星高度角較低時,ISB與衛星高度角的相關性非常明顯,這主要是由于BDS碼偏差的作用。
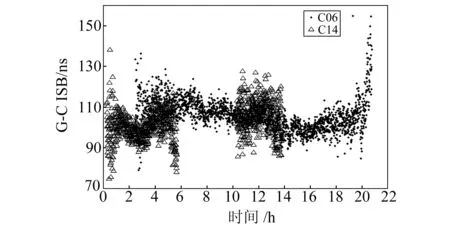
圖6 不同BDS衛星G-C ISB (CUT0站)Fig.6 G-C ISB for different BDS satellites(CUT0 station)
如圖7所示,不同的Galileo衛星ISB相差不大,單顆衛星ISB在固定區間內隨機分布,穩定性優于GLONASS和BDS,變化范圍一般在10 ns以內。觀測時段GPST 00:00~02:00之間,ISB出現劇烈跳動是由E20衛星觀測噪聲造成。單顆Galileo衛星ISB未出現類似GLONASS的周期性波動,也未出現類似BDS的與高度角相關變化。但目前Galileo衛星過少,廣播星歷播發穩定性不足,許多時段的廣播星歷衛星信號群延差改正參數(BGD)均不可用。
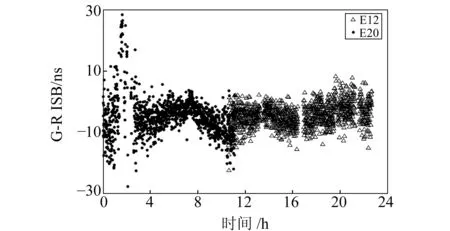
圖7 不同Galileo衛星G-E ISB(MAL2站)Fig.7 G-E ISB for different Galileo satellites (MAL2 station)
3 ISB在定位中的應用
3.1可見衛星不足條件下多模組合單點定位
多模組合單點定位通常采用增加鐘差參數的方法處理,最少需要3+n顆(n為參與解算的GNSS系統種類)可見衛星才能實現定位解算。實時低精度導航用戶的定位環境比較復雜,經常出現衛星信號被遮擋,導致只有少數衛星可見。此時,通常利用ISB短時間內的穩定性,將基于觀測值充足歷元求取的ISB作為先驗值,引入觀測模型以減少未知參數個數,實現衛星數不足條件下的單點定位。然而不同的衛星參與解算會得到不同的ISB估值,此時的ISB先驗值不適用于當前歷元。基于本文提出的ISB估計方法,利用一個存儲下來的歷史歷元觀測值,分別求取當前觀測值不足歷元可見衛星與GPS系統間的ISB,并用于當前歷元定位。
3.2實驗分析
利用6個MGEX跟蹤站(表1)2013-11-25的觀測數據,設計3種實驗方案,并根據方案要求隨機選取相應顆數的衛星觀測值。
方案1:隨機選取4顆GPS衛星進行單點定位;方案2:隨機選取來自多系統的4顆衛星,引入不考慮衛星號的ISB進行定位;方案3:隨機選取來自多系統的4顆衛星,引入顧及衛星號的ISB進行定位。
方案1中,隨機選取參與解算的GPS衛星。方案2和方案3中,CUT0、MAL2和BRUX站為在當前歷元可見衛星中隨機選取1顆GPS、1顆GLONASS、1顆BDS和1顆Galileo衛星。GOP6、CONZ和WTZZ站不能接收到BDS測距信號,于是隨機選取2顆GPS、1顆GLONASS和1顆Galileo衛星。設置存儲歷元每5 min更新一次,截止高度角10°,歷元間隔30 s, PDOP閾值40。方案2根據歷史歷元中所有觀測值求取的ISB進行改正。方案3為求取當前歷元可見衛星對應的ISB,并改正當前歷元相應的觀測值,在求取ISB時,歷史歷元中所有GPS觀測值均參與解算。
表2為上述3種方案24 h定位結果。可以看出,方案3定位精度最高。
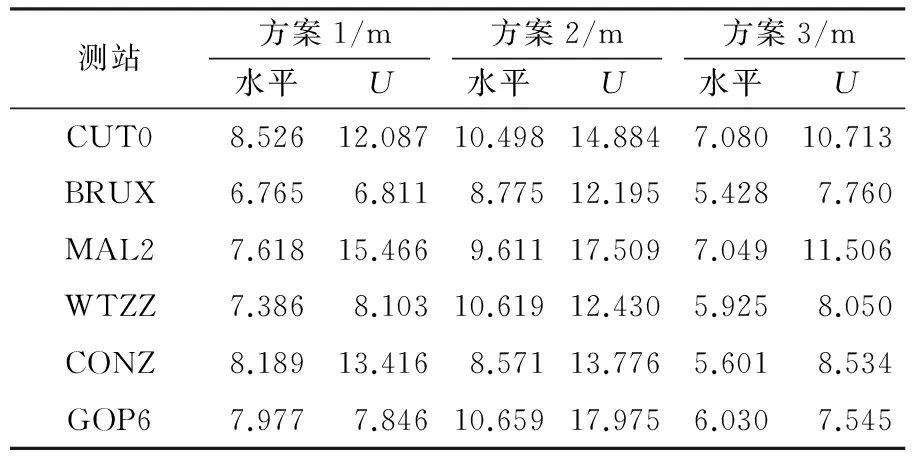
表2 定位偏差RMS統計
4 結 語
影響ISB的各項誤差源均可看作與衛星編號相關,因此提出一種基于衛星編號的ISB估計方案。以GPS為參考系統,利用不同類型接收機的觀測數據估計ISB,發現不同衛星參與解算ISB估值存在明顯差異。最后,將顧及衛星號和廣播星歷更新的ISB估計方案應用于可見衛星不足時的偽距單點定位,其精度明顯改善,且適用于多種類型接收機。
[1]徐龍威,劉暉,張明,等.不同截止高度角多模GNSS組合單點定位性能分析[J]. 大地測量與地球動力學,2015,35(6):987-991(Xu Longwei, Liu Hui, Zhang Ming, et al. Performance Assessment of Multi-GNSS Single Point Positioning with Different Cut-off Elevation Angles[J]. Journal of Geodesy and Geodynamics,2015, 35(6):987-991)
[2]Torre A D, Caporali A. An Analysis of Intersystem Biases for Multi-GNSS Positioning[J]. GPS Solutions, 2015, 19(2): 297-307
[3]Montenbruck O, Hauschild A, Hessels U. Characterization of GPS/GIOVE Sensor Stations in the CONGO Network[J]. GPS Solutions, 2011, 15(3): 193-205
[4]Cai C S, Yang G. A Combined GPS/GLONASS Navigation Algorithm for Use with Limited Satellite Visibility [J].Journal of Navigation, 2009, 62(4): 671-685
[5]Angrisano A, Gaglione S, Gioia C. Performance Assessment of GPS/GLONASS Single Point Positioning in an Urban Environment[J]. Acta Geodaetica et Geophysica, 2013, 48(2): 149-161
[6]Montenbruck O, Steigenberger P, Hauschild A. Broadcast Versus Precise Ephemerides: A Multi-GNSS Perspective[J]. GPS Solutions, 2015, 19(2):321-333
[7]張雪. GNSS系統時間偏差監測精度改善及評估[D].西安:中國科學院國家授時中心,2014(Zhang Xue. Research on the Accuracy Improvement and Assessment of GNSS System Time Offset Monitoring[D]. Xi’an:National Time Service Center, CAS, 2014)
Foundation support:National Key Research and Development Program of China, No.2016YFB0800405
About the first author:XU Longwei, PhD candidate, majors in multi-GNSS navigation and positioning, E-mail:xlw_ltu2012@163.com.
A Multi-GNSS Pseudorange Positioning Method with Inter System Bias
XULongwei1LIUHui1LIUYujie2SHUBao1ZHANGMing1QIANChuang1
1GNSS Research Center, Wuhan University, 129 Luoyu Road, Wuhan 430079, China 2Institute of Remote Sensing and Surveying and Mapping of Henan Province, 8 Huanghe Road, Zhengzhou 450003, China
In this paper, with the derivation of code observation equation, the structure and influence factors of inter system bias are analyzed. We discover that all factors for low precision navigation can be treated as related to satellite number. A new inter system bias parameter estimation solution is proposed. Finally, the new solution is applied to multi-GNSS positioning, providing reliable positioning information for real-time low precision users when only 4 multi-GNSS satellites are visible.
multi-GNSS; inter system bias; satellite number; positioning
2015-09-18
徐龍威,博士生,主要研究方向為多模GNSS導航定位,E-mail: xlw_ltu2012@163.com。
10.14075/j.jgg.2016.09.013
1671-5942(2016)09-0813-04
P228
A
項目來源:國家重點研發計劃(2016YFB0800405)。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
