參數(shù)自整定的模糊PID控制器及其改進(jìn)
2016-09-22 10:16:11陳永建
肇慶學(xué)院學(xué)報(bào) 2016年2期
劉 冰,陳永建,周 艷
(1.上海大學(xué) 機(jī)電與自動(dòng)化學(xué)院,上海 200444;2.肇慶學(xué)院 電子信息與機(jī)電工程學(xué)院,廣東 肇慶 526061)
參數(shù)自整定的模糊PID控制器及其改進(jìn)
劉冰1,陳永建2,周艷2
(1.上海大學(xué) 機(jī)電與自動(dòng)化學(xué)院,上海200444;2.肇慶學(xué)院 電子信息與機(jī)電工程學(xué)院,廣東 肇慶526061)
PID控制是工程上最為簡(jiǎn)單實(shí)用的一種控制方式,但PID參數(shù)整定難度較大,過(guò)程繁瑣,難以找到最佳參數(shù).模糊控制是一種利用人類(lèi)專(zhuān)家控制經(jīng)驗(yàn)的智能控制,模糊PID控制相對(duì)于常規(guī)的PID控制,具有參數(shù)整定方便、魯棒性好、控制性能高的優(yōu)勢(shì),但控制結(jié)構(gòu)和算法較為復(fù)雜.綜合PID控制和模糊PID控制的特點(diǎn),設(shè)計(jì)了一種改進(jìn)的混合結(jié)構(gòu)的模糊PID控制器,并以實(shí)例仿真說(shuō)明該控制器的有效性.
模糊PID控制器;自整定;PID控制器;MATLAB;Simulink
0 引言
模糊控制是一種先進(jìn)的智能控制,它不依靠精確的系統(tǒng)模型,將模糊邏輯理論應(yīng)用于工業(yè)控制領(lǐng)域,特別是對(duì)非線性、復(fù)雜對(duì)象的控制顯示出了魯棒性好、控制性能高的優(yōu)點(diǎn)[1].然而實(shí)際應(yīng)用中發(fā)現(xiàn),采用單一的模糊控制器進(jìn)行系統(tǒng)控制時(shí),往往無(wú)法達(dá)到系統(tǒng)要求的所有控制指標(biāo),這樣就需要結(jié)合其他控制器進(jìn)行補(bǔ)充.而PID控制器由于具有開(kāi)發(fā)早、結(jié)構(gòu)簡(jiǎn)單、通用性強(qiáng)、魯棒性好等優(yōu)點(diǎn),使得它在工業(yè)過(guò)程控制領(lǐng)域得到了廣泛應(yīng)用與發(fā)展,模糊PID控制器也由此應(yīng)運(yùn)而生.常規(guī)的模糊PID控制器由模糊控制器和常規(guī)PID控制器串聯(lián)組成,模糊控制器以信號(hào)的偏差e和偏差導(dǎo)數(shù)e˙作為輸入量,通過(guò)模糊推理輸出比例、積分、微分系數(shù)KP,KI,KD,進(jìn)而輸入到常規(guī)PID控制器,通過(guò)PID控制算法得到整個(gè)模糊PID控制器的輸出量.模糊PID控制器利用模糊推理大大簡(jiǎn)化了PID參數(shù)的整定問(wèn)題,PID控制也改善了模糊控制的控制性能;但其控制結(jié)構(gòu)與算法比PID控制要復(fù)雜得多,并且模糊控制器的輸入量一增加會(huì)加大模糊控制器設(shè)計(jì)和計(jì)算的復(fù)雜性.本文中,筆者設(shè)計(jì)了PID控制器與模糊PID控制器相結(jié)合的混合結(jié)構(gòu),當(dāng)偏差||e˙≤ξ時(shí),采用模糊PID控制;反之,則采用常規(guī)PID控制.該控制方法既能充分利用模糊PID控制魯棒性強(qiáng)、參數(shù)整定方便等優(yōu)勢(shì),又能在一定程度上避免因輸入量增加而引起的模糊推理結(jié)構(gòu)復(fù)雜、計(jì)算量過(guò)大的問(wèn)題.
1 參數(shù)自整定的模糊PID控制器設(shè)計(jì)
1.1PID控制器
基本的PID控制規(guī)律為

其中:KP為比例系數(shù);KI為積分系數(shù);KD為微分系數(shù).
由控制規(guī)律可知,PID控制器只需設(shè)置KP,KI,KD3個(gè)參數(shù),使用方便,原理簡(jiǎn)單.PID參數(shù)的整定一般采用湊試法來(lái)確定,根據(jù)控制對(duì)象的不同特點(diǎn),結(jié)合系統(tǒng)性能指標(biāo),通過(guò)閉環(huán)試驗(yàn),反復(fù)湊試,最終得到最佳的PID參數(shù).此外,也可以利用一定的工程整定方法,如Ziegler-Nichols整定法、臨界比例度法、衰減曲線法,按照工程經(jīng)驗(yàn)公式對(duì)PID參數(shù)進(jìn)行整定;還可以在MATLAB/Simulink環(huán)境下進(jìn)行計(jì)算機(jī)仿真,更為快捷地找到最佳PID參數(shù).PID控制器參數(shù)的整定是一個(gè)需要反復(fù)調(diào)整測(cè)試的過(guò)程,若系統(tǒng)的動(dòng)態(tài)特性發(fā)生變化,則PID參數(shù)又需要重新整定,反復(fù)測(cè)試調(diào)整,其過(guò)程非常繁瑣;另一方面,PID控制器對(duì)非線性、時(shí)變、耦合及參數(shù)與結(jié)構(gòu)不確定的復(fù)雜過(guò)程難以控制,這是其存在的不足.
1.2參數(shù)自整定的模糊PID控制器
自從模糊邏輯應(yīng)用于蒸汽機(jī)的控制后,模糊控制在工業(yè)工程控制、機(jī)器人、交通運(yùn)輸?shù)确矫娴玫搅藦V泛應(yīng)用.參數(shù)整定一直都是PID控制的核心,模糊控制能很好地解決這一問(wèn)題.參數(shù)自整定的模糊PID控制器是具有PID功能的參數(shù)自整定的模糊控制器,它的基本結(jié)構(gòu)如圖1所示.
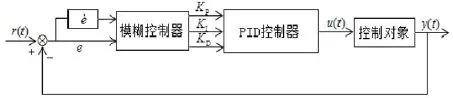
圖1 參數(shù)自整定的模糊PID控制器結(jié)構(gòu)圖
模糊PID控制器以偏差e和偏差導(dǎo)數(shù)e˙為輸入,經(jīng)過(guò)模糊推理得到KP,KI和KD3個(gè)參數(shù),將其輸入到常規(guī)PID控制器中可得控制器的控制量u.上述控制器是一個(gè)兩輸入、三輸出的模糊控制器.偏差e、偏差變化率e˙及PID參數(shù)KP,KI,KD的模糊集均為{NB,NM,NS,ZO,PS,PM,PB},分別表示相應(yīng)參數(shù)“負(fù)大”、“負(fù)中”、“負(fù)小”、“零”、“正小”、“正中”、“正大”.論域均為{-3,-2,-1,0,1,2,3}.同時(shí),NB與PB的隸屬函數(shù)選擇Sigmoid型,其他均采用三角形隸屬度函數(shù).
模糊控制器的核心是模糊控制規(guī)則的建立,需通過(guò)模糊推理、模糊關(guān)系的合成等一系列運(yùn)算,最終得到輸出量,因此模糊控制規(guī)則的選取對(duì)模糊控制器性能的影響至關(guān)重要[2]124.建立模糊控制規(guī)則的方法一般有經(jīng)驗(yàn)歸納法、合成推理法等.考慮到PID控制器的特點(diǎn),筆者采用經(jīng)驗(yàn)歸納法建立控制規(guī)則.
現(xiàn)將PID控制器參數(shù)對(duì)控制過(guò)程的影響[3]總結(jié)如下:
1)比例作用KP可以減小余差,改善控制精度,加快調(diào)節(jié)速度;但它不能消除余差,并且KP的增大將加劇系統(tǒng)振蕩,造成系統(tǒng)的不穩(wěn)定.
2)積分作用主要是消除余差,但積分作用大將會(huì)使得系統(tǒng)振蕩,穩(wěn)定性變差.
3)微分作用可以改善動(dòng)態(tài)性能,加快系統(tǒng)的動(dòng)態(tài)響應(yīng),減少超調(diào)量和調(diào)節(jié)時(shí)間;但微分作用過(guò)大會(huì)使系統(tǒng)出現(xiàn)不穩(wěn)定,并且易受干擾影響.
PID參數(shù)對(duì)于控制性能的影響[4]如表1所示.
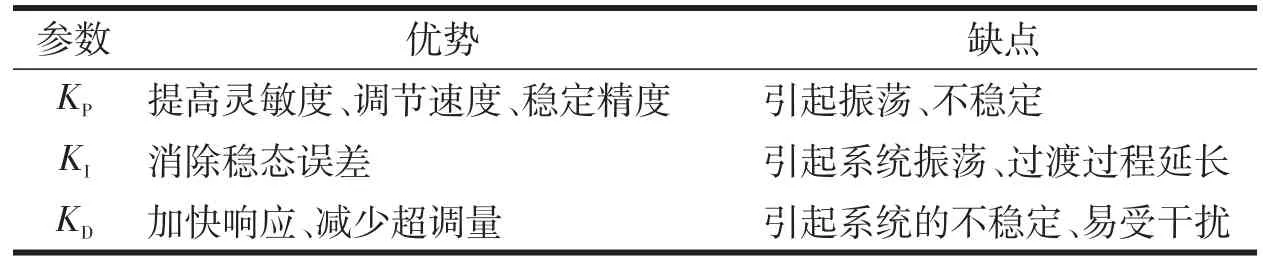
表1 PID參數(shù)對(duì)控制性能的影響
由此可見(jiàn),在確定PID參數(shù)的模糊控制規(guī)則時(shí),應(yīng)綜合考慮控制對(duì)象的特性、被控制參數(shù)的性質(zhì)、擾動(dòng)以及控制系統(tǒng)性能指標(biāo)等各方面因素,反復(fù)檢驗(yàn),以期得到最佳的控制規(guī)則.
根據(jù)以上PID參數(shù)對(duì)控制過(guò)程的影響,并結(jié)合控制系統(tǒng)的性能指標(biāo)要求,將模糊控制規(guī)則設(shè)計(jì)如下[5-6]:
1)當(dāng)e過(guò)大時(shí),取較大的KP和較小的KD,以減少穩(wěn)態(tài)誤差,加快系統(tǒng)的響應(yīng)速度;
2)當(dāng)e和e˙都處于中等時(shí),取較小的KP以增強(qiáng)系統(tǒng)的穩(wěn)定性,KI和KD取值要適當(dāng),既要能消除穩(wěn)定誤差,又要能減少超調(diào)量,不引起系統(tǒng)的振蕩;
3)當(dāng)e較小時(shí),為消除穩(wěn)態(tài)誤差應(yīng)取較大的KP和KI,而KD取值要適當(dāng),以免使系統(tǒng)產(chǎn)生振蕩、不穩(wěn)定的現(xiàn)象.
KP的控制規(guī)則表如表2所示.
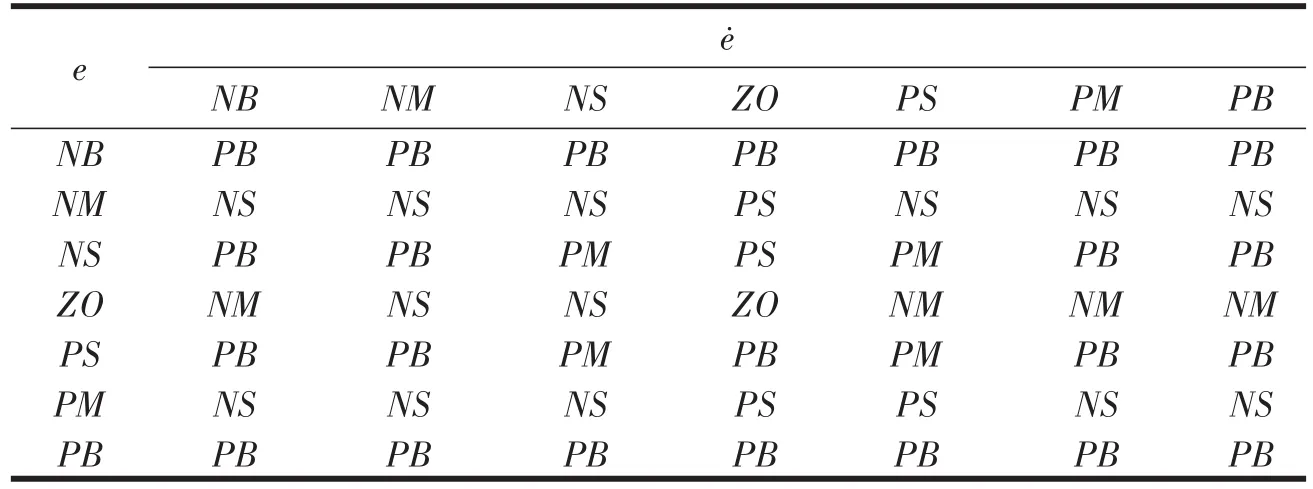
表2 KP的控制規(guī)則表
為了直觀形象地觀察仿真結(jié)果,筆者利用MATLAB的模糊邏輯工具箱與Simulink的無(wú)縫連接功能,先在模糊邏輯工具箱中建立模糊推理系統(tǒng),然后利用Simulink的仿真環(huán)境進(jìn)行仿真分析.這里取被控對(duì)象的傳遞函數(shù)為,仿真結(jié)果如圖2所示.
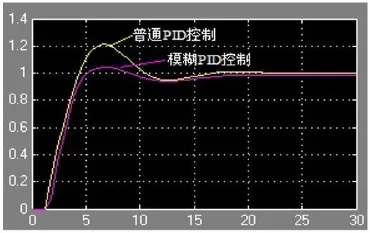
圖2 參數(shù)自整定的模糊PID控制器的仿真曲線圖
2 混合結(jié)構(gòu)的參數(shù)自整定模糊PID控制器
以上討論的模糊控制以偏差e和偏差變化率e˙為輸入量,本質(zhì)上相當(dāng)于一種非線性PD控制[2]124.為消除穩(wěn)態(tài)誤差,需加入積分作用,但積分作用要根據(jù)系統(tǒng)偏差和偏差變化率的不同而不斷變化,以便能更好地消除穩(wěn)態(tài)誤差,同時(shí)又不引入不穩(wěn)定因素.從圖2可以看出,普通PID控制和模糊PID控制各有優(yōu)缺點(diǎn).普通PID控制響應(yīng)速度快,調(diào)整時(shí)間短,但超調(diào)大,參數(shù)整定難度大;模糊PID控制響應(yīng)速度較快,超調(diào)小,但控制結(jié)構(gòu)較為復(fù)雜,調(diào)節(jié)時(shí)間較長(zhǎng).為解決這一問(wèn)題,筆者提出一種混合結(jié)構(gòu)的模糊PID控制器,以便充分發(fā)揮2種控制器的優(yōu)勢(shì),達(dá)到最佳的控制效果.混合結(jié)構(gòu)的模糊PID控制器的控制方式如下:

其中:e為偏差;ε為一極小的正值.當(dāng)取ε=0.01時(shí),仿真圖形如圖3所示.
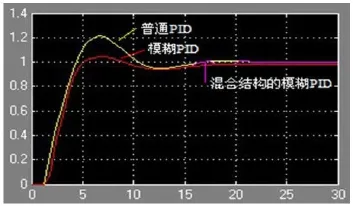
圖3 混合結(jié)構(gòu)的模糊PID控制器的仿真曲線圖
由圖3可以看出,模糊PID控制在超調(diào)量、穩(wěn)態(tài)精度和動(dòng)態(tài)性能等方面都優(yōu)于普通PID控制,而混合結(jié)構(gòu)的模糊PID控制,改善了模糊PID控制的調(diào)節(jié)時(shí)間、穩(wěn)定性等性能.
3 結(jié)語(yǔ)
參數(shù)自整定的模糊PID控制器,是利用模糊控制的原理結(jié)合PID控制而產(chǎn)生的,它將模糊控制利于非線性、復(fù)雜系統(tǒng)的控制和控制性能高、魯棒性好等優(yōu)點(diǎn),與PID控制的控制結(jié)構(gòu)簡(jiǎn)單、易于實(shí)現(xiàn)相融合,并實(shí)現(xiàn)了PID參數(shù)的自整定.從仿真結(jié)果分析,參數(shù)自整定模糊PID控制的性能明顯優(yōu)于普通PID控制.基于此,筆者提出了一種混合結(jié)構(gòu)的模糊PID控制器,進(jìn)一步改善了控制器的性能.
[1]李國(guó)勇.智能控制及其MATLAB實(shí)現(xiàn)[M].北京:電子工業(yè)出版社,2005:10.
[2]李士勇.模糊控制.神經(jīng)控制和智能控制論[M].哈爾濱:哈爾濱工業(yè)大學(xué)出版社,1996.
[3]趙永娟,孫華東.基于Matlab的模糊PID控制器的設(shè)計(jì)和仿真[J].微計(jì)算機(jī)信息(測(cè)控自動(dòng)化),2009,25(1):48-50.
[4]丁建強(qiáng),任曉,盧亞平.計(jì)算機(jī)控制技術(shù)及其應(yīng)用[M].北京:清華大學(xué)出版社,2012:201-202.
[5]李茜,李彬,朱雪丹.模糊自整定PID控制器的設(shè)計(jì)與仿真[J].化工自動(dòng)化及儀表,2010,37(3):25-28.
[6]吳振順,姚建均,岳東海.模糊自整定PID控制器的設(shè)計(jì)及其應(yīng)用[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2004(11):1 578-1 580.
Research andd IImmprovement of Parameters Self-Tuning Fuzzy PID Controllleerr
LIU Bing1,CHEN Yongjian,ZHOU Yan2
(1.College of Mechanical and Electrical Engineering andAutomation,Shanghai University,Shanghai 200444,China;2.College of Electronic Information and Mechatronic Engineering,Zhaoqing University,Zhaoqing,Guangdong 526061,China)
ractPID control is the simplest and most useful control mode in engineering,but the PID parameters adjustment is difficult and tedious,it is hard to find out the best parameters.Fuzzy control is an intelligent control,making use of expert control experience,which has a series of advantages,such as parameters tune convenience,the good robustness and control performance,but the arithmetic and control structure of it is more complex.Considering the characteristics of composite PID control and fuzzy PID control,we designed an improved mixed fuzzy PID controller structure and described the simulation of the effectiveness of the controller.
ordsfuzzy PID controller;self-tuning;PID controller;MATLAB;Simulink
TP15
A
1009-8445(2016)02-0048-04
(責(zé)任編輯:陳靜)
2014-12-15
劉冰(1981-),女,黑龍江富錦人,上海大學(xué)機(jī)電與自動(dòng)化學(xué)院碩士研究生.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45

- 肇慶學(xué)院學(xué)報(bào)的其它文章
- 安徽省高校男子競(jìng)技籃球教練員現(xiàn)狀及對(duì)策研究
——基于安徽省第13屆運(yùn)動(dòng)會(huì)高校部籃球(男子)比賽的調(diào)查 - 我國(guó)高水平男子龍舟項(xiàng)目運(yùn)動(dòng)員專(zhuān)項(xiàng)身體素質(zhì)模型探析
- 2015年國(guó)際乒聯(lián)世界巡回賽日本公開(kāi)賽決賽技戰(zhàn)術(shù)分析
- 中外男子800 m成績(jī)差距比較分析
- 芳香植物香氣對(duì)人體舒適感的影響研究
- 無(wú)線測(cè)溫在垃圾堆肥發(fā)酵中的應(yīng)用