三桿張拉整體折展過程動力學分析
2016-10-11 07:59:19羅阿妮李旭李全賀程建軍劉賀平
哈爾濱工程大學學報 2016年7期
羅阿妮,李旭,李全賀,程建軍,劉賀平
(哈爾濱工程大學機電工程學院,黑龍江哈爾濱150001)
三桿張拉整體折展過程動力學分析
羅阿妮,李旭,李全賀,程建軍,劉賀平
(哈爾濱工程大學機電工程學院,黑龍江哈爾濱150001)
本文針對三桿張拉整體結構的折展問題,提出一種索驅動的方法。利用矩陣法分析,使用節點廣義坐標和連接矩陣描述結構中各構件的位置和空間分布,建立結構數學模型;通過索構件長度協調變化,桿構件長度不變來分析結構的折展過程。在考慮構件彈性的情況下,對水平索為主動構件實現結構向軸線方向折疊的運動過程進行了動力學分析。通過仿真分析驗證了此折疊方案的可行性。并對折展過程中構件的長度和內力的變化進行了分析,分析結果表明:張拉整體結構通過構件長度協調變化可實現折展功能,此方法可使用于三桿張拉整體單元以及以三桿張拉整體單元為基礎的復雜張拉整體結構。
張拉整體;節點廣義坐標;連接矩陣;構件內力;可展結構
張拉整體結構是一種由連續受拉的索和不連續的受壓桿構件組成的自應力穩定結構[1]。結構質量較傳統的可展結構輕,且折疊后體積緊湊[2],因此,張拉整體結構的可展研究具有重要意義。
張拉整體結構轉化為可展結構的研究中,折展方式和運動過程的動力學分析是兩個重要方面。本文突破了以構件為研究對象的傳統動力學模型構建方法,基于節點廣義坐標[3-5]、連接矩陣、系統剛度矩陣[6-9]建立分析模型。為便于分析本文以三桿張拉整體[10-12]單元為基礎進行折展方式的研究及運動過程的動力分析。
1 三桿張拉整體結構構建
三桿張拉整體結構如圖1所示,由正三棱柱,下端面固定,各棱繞z軸逆時針旋轉150°[3,10]得到。以棱柱下底面形心 o為原點,x軸由形心o指向節點1,z軸由下底面形心指向上表面形心。結構有6個節點、9根索、3根桿(細線表示索,粗線表示桿)。
1.1節點坐標
節點廣義坐標矢量矩陣[10]:

其中

式中:r為棱柱底面節點構成三角形外接圓半徑,h為棱柱的高度(見圖1)。
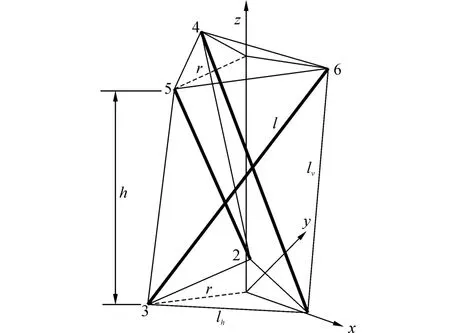
圖1 三桿張拉整體結構示意圖Fig.1 Three-bar tensegrity structure diagram
1.2分析構件連接矩陣及構件矢量陣
連接矩陣的一行,代表系統的一個節點廣義坐標與系統所有構件的關系(起點“-1”、終點“1”、無關“0”)。連接矩陣的一列代表系統的一個構件與系統所有節點廣義坐標之間的關系[3-5](起點“-1”、終點“1”、無關“0”)。
桿連接矩陣[10]為

通過節點矩陣及桿連接矩陣可以得到桿的空間向量:

索的連接矩陣[10]為
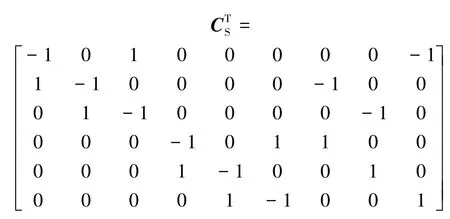
通過節點矩陣及索連接矩陣可以得到索的空間向量:

對構件向量求模,可得到桿構件長度。
2 折展分析
2.1折展方式
改變桿構件或索構件的長度都可以促使結構展開和折疊。由于索構件長度容易改變,而且其柔性也降低了展收的難度。因此,選擇桿構件長度不變,只調節索構件長度來促使結構折展。
具體有兩種折疊方式:通過水平索主動縮短,斜索隨動伸長,就可以使結構向軸線折疊為一束;通過斜索主動縮短,水平索隨動伸長,就可以使結構向端面折疊。這兩種折疊過程是相反的,文中選擇水平索為主動索這一折疊方式進行分析。
2.2折展分析的方法
2.2.1節點位移
本文以節點為研究對象,對結構進行動力學分析。設結構總質量為m,將總質量等效到系統節點上。由于所有節點到達結構形心的距離相等,所以等效在六個節點上的質量相等,均為m/6。則結構的運動方程為[9]

令Δt為時間增量。根據中心差分公式[11],得到此節點的加速度表達式:

進一步推導可得其速度表達式為

將式(5)、(6)代入式(4),經過整理后可以得到

由于索桿結構的振動過程中阻尼很小,對結構運動影響不大,可以忽略,因此式(7)可以改寫為

由式(8)可以得到位移的增量Δδt:

這樣就可以求出節點的新坐標:

根據上式得到的新的節點矩陣分析此時運動狀態是否已達到折疊要求。
2.2.2節點受力分析
任意構件只與兩個節點相連,構件只受軸向力作用[12],單個構件受力如圖2。

圖2 構件受力分析圖Fig.2 Member stress analysis
構件兩端節點受力與位移關系如下:
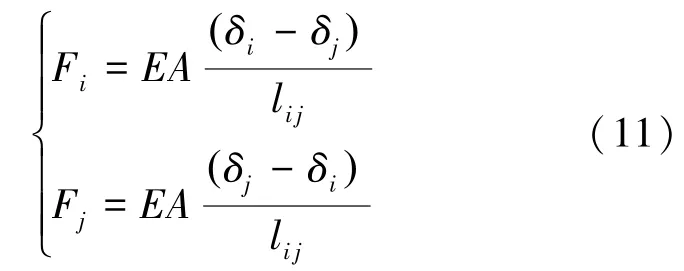
式中:E為材料的彈性模量,A為構件橫截面積,δi、δj分別為i與j節點的位移,Fi、Fj分別為i與j節點所受的力,lij為該構件的原始長度。將式(11)寫成矩陣的形式:

將節點力與位移分為x、y、z三個方向:
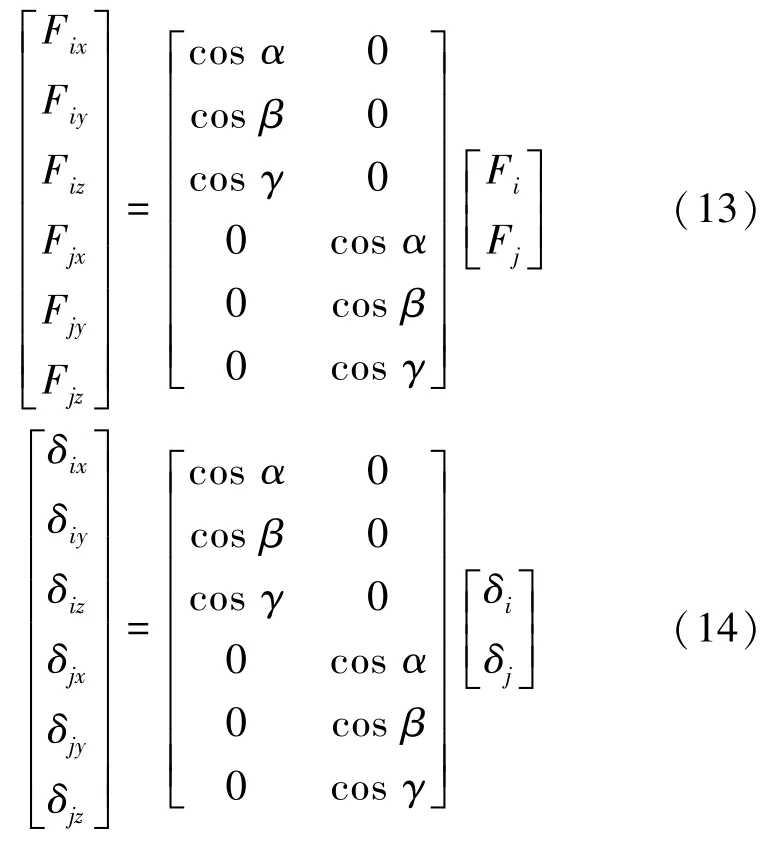
式中:α、β、γ分別為力與位移在矢量方向上與三坐標軸的夾角。將式(11)的矩陣等號兩邊同時做成夾角矩陣的轉置矩陣,通過結合式(12)~(14)可以得到

式中:矩陣 K稱為剛度矩陣[9],剛度矩陣是對稱矩陣。
在對單個桿、索單元兩個節點位移分析的基礎之上,可以得到單元的剛度矩陣,在預應力已知的情況下可以得到節點位移。為了直接得到整個系統的位移需要知道體系的總剛度矩陣,這里引入協調矩陣T,協調矩陣是將某節點剛度矩陣內的元素放置在總體剛度矩陣對應的位置上,其余位置為0,其目的是為了將單元剛度矩陣的維數擴大到總剛度矩陣的維數,得到體系的單元剛度矩陣[9]:

將經過擴充后的所有單元剛度矩陣相加得到結構總體剛度矩陣:
式中:u是構件數目。通過系統總剛度矩陣,可以得到等式:

可以利用該式在節點位移已知的情況下求解此時系統節點受力情況。節點所受合力為

3 折展過程仿真分析
水平索收縮,斜索隨動伸長,驅動結構向軸線折疊為一束。運動過程中,為了適應斜索長度隨動變化,用彈簧替代斜索。設在運動的初始狀態替代斜索的彈簧伸長量為0。
水平索上施加恒力來驅動結構運動,設桿的長度為10 m,初始位置時r為3 m,總質量為150 kg,每根水平索的驅動力大小為。彈簧剛度系數為1 000 N/m,桿的彈性模量Eb=2.06×1011Pa,桿的橫截面積Ab=7.85×10-5m2。根據前面的分析,通過MATLAB編寫程序對結構的折疊過程進行仿真分析。圖3為仿真分析所獲得的三桿張拉整體結構的運動過程仿真圖。這一分析結果證明了收縮水平索驅動結構折疊的這一方案是可行的。
在結構運動過程中,構件長度和內力都是在不斷變化的,構件的長度變化曲線如圖4所示。
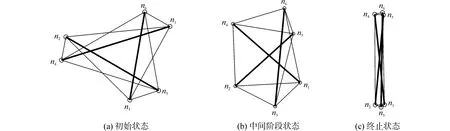
圖3 結構折疊過程Fig.3 The folding process

圖4 構件長度、速度、加速度變化曲線Fig.4 The length,velocity,acceleration curve
由圖4(a)可知,在結構運動過程中,在考慮彈性變形的條件下,桿的長度也有所變化,但是由于桿的彈性模量相對較大,所以桿的長度變化很小。斜索一直被逐漸拉長,直到長度與桿長相等,因此斜索利用拉簧張緊既可。水平索作為驅動構件,它的長度隨著結構運動不斷變短。
從圖4(b)發現,由于桿構件的長度變化微小,所以其長度變化速度的變化很小。斜索和水平索的長度變化速度都為先增大后減小,在運動結束時速度趨于0。比較而言,斜索的長度變化速度較平穩,而水平索長度變化要劇烈得多。
由圖4(c)可知,水平索的長度變化加速度從運動開始時變化較小,接近結束時,其加速度迅速變大,其變化幅度較其他構件大好多倍。由于運動變化較為劇烈,所以應該通過一定的控制策略來減小水平索的長度變化加速度。在運動的終止段減小驅動力是一種可取的改進方案。
結構運動過程中,構件的受力變化如圖5所示。由于水平索為驅動構件,其驅動力為定值,這里就沒有分析。由于斜索由彈簧替代,在運動過程中一直伸長,因此其內力是逐漸變大的,圖5也反映了這一變化規律。因此在設計此彈簧時,只要考慮運動起始點和終止點其長度值即可。
桿的內力波動幅度較大,這也說明其長度在運動過程中也是按此規律變化。桿構件的抖動,勢必會引起整個結構在運動的過程中發生振動,因此張拉整體結構在運動過程中的抖動是不可避免的。當此類結構作為像星載可展結構等對振動有嚴格要求的機械設備來使用時,這一振動現象必須要進一步分析。

圖5 構件內力變化曲線Fig.5 Internal force curves
4 結論
本文通過節點廣義坐標和連接矩陣建立三桿張拉整體結構數學模型;介紹了通過收縮水平索促使結構折疊的方法,分別分析了在折展過程中節點的位移與受力變化。
通過分析,有以下結論:
1)提出通過收縮水平索,斜索隨動伸長,促使結構收縮為一束這種結構折疊方法。
2)在折疊過程中,桿構件的抖動會引起整個結構在運動的過程中抖動。因此,此方法應用于對振動有嚴格要求的機械設備時,需對此振動現象進一步分析。
3)此折疊方法不止適用于三桿棱柱型張拉整體結構,對其他張拉整體可展結構也同樣適用。
[1]FULLER R B.Tensile-integrity structures:United States,3063521[P].1962-11-13.
[2]劉錫良,陳志華.一種新型空間結構-張拉整體體系[J].土木工程學報,1995,28(4):51-57. LIU Xiliang,CHEN Zhihua.A new type of space structurestensegrity systems[J].Journal of civil engineering,1995,28(4):51-57.
[3]SKELTON R E,OLIVEIRA M C.Tensegrity systems[M]. New York:Springer Science Business Media,2009.
[4]LUO Ani,SKELTON R E,LIU Heping,et al.Structure of the ball tensegrity robot[C]//Proceedings of IEEE International Conference on Robotics and Biomimetics.Paris,2014.
[5]GONZáLEZ A,LUO A N,LIU H P.Construction of a unit cell tensegrity structure[C]//Proceedings of the 14th World Congress in Mechanism and Machine Science.Taipei,2015: 25-30.
[6]ZHANG Liyuan,LI Yue,CAO Yanping,et al.Stiffness matrix based form-finding method of tensegrity structures[J]. Engineering structures,2014,58:36-48.
[7]GUEST S D.The stiffness of tensegrity structures[J].Institute of mathematics and its applications journal of applied mathematics,2011,76(1):57-66.
[8]GUEST S.The stiffness of prestressed frameworks:a unifying approach[J].International journal of solids and structures,2006,43(3/4):842-854.
[9]孔令營.圓環張拉整體結構的構型及分析方法研究[D].哈爾濱:哈爾濱工程大學,2015:62-67. KONG Lingying.The research on configuration and analytical method of torus-type tensegrity structures[D].Harbin: Harbin Engineering University,2015:62-67.
[10]LIU Heping,LI Xu,CHENG Jianjun,et al.The folding course for the tensegrity basic unit[C]//Proceedings of the ASME 2015 International Mechanical Engineering Congress and Exposition.Houston,Texas,USA,2015.
[11]張幸鏘,袁行飛.新型三棱柱張拉整體平板結構研究[J].建筑結構,2011,41(3):24-27,77. ZHANG Xingqiang,YUAN Xingfei.Research of a new triangular prism tensegrity plate structure[J].Building structure,2011,41(3):24-27,77.
[12]陳志華,史杰,劉錫良.張拉整體三棱柱單元體試驗[J].天津大學學報,2004,37(12):1053-1058. CHEN Zhihua,SHI Jie,LIU Xiliang.Experimental study on triangular prism unit of tensegrity[J].Journal of Tianjin university,2004,37(12):1053-1058.
本文引用格式:
羅阿妮,李旭,李全賀,等.三桿張拉整體折展過程動力學分析[J].哈爾濱工程大學學報,2016,37(7):974-978.
LUO Ani,LI Xu,LI Quanhe,et al.Dynamic analysis of the three-bar tensegrity deployable structure[J].Journal of Harbin Engineering University,2016,37(7):974-978.
Dynamic analysis of the three-bar tensegrity deployable structure
LUO Ani,LI Xu,LI Quanhe,CHENG Jianjun,LIU Heping
(College of Mechanical and Electrical Engineering,Harbin Engineering University,Harbin 150001,China)
The string drive method is used to deploy the three-bar tensegrity structure.Based on the matrixes analysis,the mathematical model is built up with the generalized node coordinates and connectivity matrixes expressed positions and arrangements of members.The lengths of strings are adjusted with the bars'length constant to deploy the structure.Based on the flexible of the members,shortening the level strings to make the structure fold towards its'axis,it is analyzed that the dynamics of the structure.The simulation proved this deployable method is feasible. The changings of the lengths and inner forces of the members are given.The results show that adjusting the strings lengths could make the structure deployment.This method can be used in the three-bar tensegrity deployable structure and other structures which build up with the three-bar basic units.
tensegrity;generalized node coordinates;connectivity matrix;dynamic analysis;deployable structure
10.11990/jheu.201505069
TH113
A
1006-7043(2016)07-974-05
2015-05-25.網絡出版日期:2016-05-13.
黑龍江省自然基金項目(11202128);機器人技術與系統國家重點實驗室(HIT)開放研究項目(SKLRS(HIT)2014 ZD 05,SKLRS(HIT)2015 M 01).
羅阿妮(1978-),女,副教授,博士;劉賀平(1975-),男,副教授,博士.
劉賀平,E-mail:liuheping@hrbeu.edu.cn.
網絡出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20160513.1344.006.html
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
