一種新的可變數目機動目標聯合檢測與跟蹤算法
2016-10-14 00:13:39胡秀華郭雷李暉暉燕攀登
中南大學學報(自然科學版) 2016年10期
關鍵詞:模型
胡秀華,郭雷,李暉暉,燕攀登
?
一種新的可變數目機動目標聯合檢測與跟蹤算法
胡秀華,郭雷,李暉暉,燕攀登
(西北工業大學自動化學院,陜西西安,710129)
在低信噪比多傳感器觀測環境下,針對機動目標數目變化時跟蹤性能不高的問題,提出一種新的目標聯合檢測與跟蹤算法。依據粒子存在變量進行預測狀態粒子集的采樣,考慮狀態粒子集與當前觀測值的關聯程度,利用模糊拍賣算法與粒子群優化理論解決狀態集與觀測集之間的關聯問題,并給出目標出現與消失的判定準則,實現粒子權值更新;依據混合采樣方法得到包含模型信息和狀態信息的粒子集,并按照目標模型概率進行粒子狀態融合得到目標局部狀態后驗估計值和均方誤差;最后,對關聯的各傳感器局部航跡信息進行加權融合,得到各目標的全局狀態估計值,并與經典多模粒子濾波算法的仿真試驗對比分析。研究結果表明:新算法在運動模型概率估計、狀態估計及目標數目估計方面具有有效性。
多模粒子濾波;檢測與跟蹤;關聯判定;目標;混合采樣
現代防空系統需要借助于多傳感器提供的互補觀測信息進行探測工作,復雜的觀測環境對機動目標跟蹤算法也提出了越來越高的要求。傳統的先檢測后跟蹤算法大多先對傳感器每幀原始數據進行門限檢測,然后利用超過門限值的測量數據進行跟蹤處理。這種方法雖然在一定程度上減少了計算量,但是損失了許多有用信息。為了提高目標的檢測與跟蹤性能,利用未經門限處理的多幀原始觀測數據進行能量積累,以實現融合檢測與跟蹤的算法受到了廣泛關注[1]。典型的檢測與跟蹤算法包括基于Hough變換的算法,動態規劃算法、極大似然估計以及粒子濾波算法等。其中,基于粒子濾波實現的遞歸算法得到了廣泛的改進與研究應用[2]。多模粒子濾波算法利用粒子濾波實現對各粒子加權求和得到狀態估計,然后依據多模型中每個模型的模型概率對各模型的估計值加權求和,得到多模型粒子濾波器的全局估計值,該方法通常是在所采用的濾波器完成對狀態估計的同時,進行實時系統模型估計,適用于機動目標跟蹤[3?4]。關于經典多模粒子濾波算法的改進方法大致涉及粒子重要性采樣、重采樣、模型概率以及濾波框架4類。DAVEY等[5]在基于兩級采樣的粒子濾波算法基礎上,采用邊緣粒子濾波過程進行持續粒子采樣,改善了狀態采樣的多樣性,為多模粒子濾波算法提供了思路。王曉 等[6]給出了基于混合采樣的多模型粒子濾波算法單機動目標跟蹤,計算復雜度與單模型粒子濾波算法相當,算法運行效率高。吳瑕等[7]給出了一種混合估計多模粒子濾波算法,并對重采樣步驟進行了改進,提出的序貫重要性平滑重采樣策略可以有效提高粒子多樣性,文中雖然考慮了目標是否存在的模型變量,但是沒有給出目標數目變化的判定方法。WANG等[8]針對距離模糊雷達的單目標跟蹤問題,在擴維的目標狀態矢量中增加了表示目標是否存在以及表征脈沖間隔數的變量,提出的混合多模粒子濾波方法有效改善了目標跟蹤性能,但有待于進一步研究多目標存在的情況。鑒福升等[9]通過將模型估計和狀態估計分開計算,利用模型似然函數計算模型后驗概率,可以用較小的粒子總數獲得較好的跟蹤性能,減小了計算量。針對包含連續狀態變量和離散狀態變量的隨機混合系統,YANG等[10]給出了一種基于新息誤差的反饋式多模粒子濾波算法結構,并運用在了角度測量傳感器的單目標跟蹤中,但是該方法與標準多模粒子濾波算法的目標跟蹤性能及算法復雜度對比方面還有待于進一步研究。總之,現有算法雖然在一定程度上解決了粒子多樣性及算法計算量問題,但是大多沒有考慮實際多傳感器觀測環境下機動目標數目變化時的跟蹤情況,并且忽視了對狀態粒子集與當前觀測值的關聯判定,降低了目標跟蹤性能。針對上述問題,本文作者在多模粒子濾波的框架基礎上,提出一種新的目標聯合檢測與跟蹤算法。首先進行初始化設置,獲得初始時刻的粒子集;在粒子狀態預測與更新步驟中,依據粒子存在變量進行預測狀態粒子集的采樣,考慮狀態粒子集與當前觀測值的關聯程度,利用模糊拍賣算法與粒子群優化理論解決狀態集與觀測集之間的關聯問題,并給出目標出現與消失的判定準則,實現粒子權值更新;利用序貫重要性采樣理論對混合采樣粒子集進行重采樣,得到包含模型信息和狀態信息的粒子集;考慮粒子存在變量的影響,按照目標模型概率進行粒子狀態融合得到目標局部狀態后驗估計值和均方誤差;最后,對關聯的各傳感器局部航跡信息進行加權融合,得到各目標的全局狀態估計值,并最終求得機動目標數目的估計值。通過與經典多模粒子濾波算法的仿真試驗對比分析,驗證了本文給出的新算法的有效性。
1 系統建模
在多傳感器公共探測區域內,考慮在時刻有個目標(其中,=1,2,…;=0,1,…,max;max為目標可能存在的最大數目)。令表示目標的狀態,表示目標在時刻接收到的傳感器S的量測數據(=0,1,…,;傳感器編號為=1,2,…,;為傳感器最大數目)。
1.1 目標運動模型
在笛卡兒坐標系內,假設目標在?平面內作機動運動,在時刻,選取目標狀態變量為
系統模型狀態間轉換概率可表示為
其中:=1,2,3;=1,2,3;表示系統模型由?1時刻的狀態轉換為時刻的狀態的概率,系統模型間概率轉移矩陣可記為,且滿足;=1,2,3。
其中:1?P為新目標在場景中不存在的概率;1?P為目標繼續在場景中存在的概率。
1.2 傳感器觀測模型
假設多傳感器系統由雷達和紅外組成,在極坐標系下給出各傳感器S的觀測模型[11?12]。
對于雷達傳感器系統,假設雷達在探測區域的原始觀測數據為基于信號功率強度的距離?多普勒?方位圖像,設定每幀圖像有N×N×N個分辨單元,每個分辨單元可表示為(,,)(=1,2,…,N;=1,2,…,N;=1,2,…,N;N,N和N分別為功率測量單元中距離、多普勒和方位角單元的數目)。在時刻,對于單個目標,雷達傳感器在分辨單元(,,)的量測數據,k可以表示為每個分辨單元接收信號功率的集合,即
其中:A表示目標的復幅度;為用以計算各分辨單元目標回波強度的函數;為分辨單元中的復量測噪聲。
對于有多個目標存在的情況,雷達的接收信號功率為多個單目標功率值的疊加。
對于紅外傳感器系統,假設傳感器在探測區域的原始量測為序列灰度圖像。設定每幀觀測圖像有N×N個分辨單元,若每個分辨單元可表示為(,)(其中,=1,2,…,N;=1,2,…,N),分辨單元大小為Δ×Δ,則在時刻,對于單個目標,紅外傳感器量測數據可以表示為
根據目標是否存在,依據目標接收信號強度,分辨單元(,)內的觀測數據表示為
對于有多個目標存在的情況,紅外傳感器的接收信號強度為多個單目標幅值的疊加。
2 一種新的目標聯合檢測與跟蹤算法的實現
2.1 算法的提出與改進思路
在多模粒子濾波的框架基礎上,提出一種新的分布式目標聯合檢測與跟蹤算法。該算法利用模糊拍賣算法與粒子群優化理論求得狀態粒子集與當前觀測值的關聯程度,給出目標出現與消失的判定準則,并依據混合采樣方法得到包含模型信息和狀態信息的粒子集,實現對目標運動模型及狀態變化的準確估計。設計的新算法能夠在判定狀態粒子集與傳感器觀測值的關聯性基礎上,依據目標存在狀態、模型概率等先驗信息更準確地完成粒子狀態預測及更新,可以有效處理跟蹤期間目標相距較近以及目標數目發生變化的情況,最終實現目標融合狀態估計,適合于目標數目發生變化時的多傳感器多目標跟蹤場景。新算法的分布式融合估計結構原理如圖1所示,其中和為單傳感器S輸出的狀態局部估計信息,和為狀態全局融合估計信息。
2.2 結合模糊拍賣算法與粒子群優化理論的狀態粒子集與觀測集的關聯判定
在雜波環境下,為有效地進行多目標狀態粒子集更新,需要先將當前的觀測值與每個目標的狀態粒子集進行數據關聯判定。為避免窮舉搜索,利用動態二維分配思想解決觀測與航跡之間的關聯問題,以觀測與航跡的模糊統計距離為代價,構建觀測值?狀態粒子集二維分配問題的數學模型;利用模糊理論與拍賣算法相結合,將模糊代價矩陣轉換為拍賣算法中的利益矩陣,將求解最小代價問題轉化為拍賣算法中的求解利益最大問題[13],同時,由于在低信噪比環境中,干擾量測較多,拍賣算法的優化搜索效率較低,引入粒子群優化理論進行全局搜索[14],最后得出目標狀態粒子集與傳感器觀測集的關聯性判定結果。

圖1 分布式融合估計結構原理
定義二進制決策變量為

則觀測值?狀態粒子集二維分配問題的數學模型可表示為式(10)~(13),即
約束條件為
其中:式(10)為目標函數;式(11)表示每一個觀測有唯一的源;式(12)表示1個給定目標最多有1個觀測以其為源,式(13)表示第個觀測值與第個目標狀態粒子集是否關聯,1為相關,0為不相關。上述分配問題的最優解可表示為每行、每列最多只有1個1的階關聯決策矩陣。
依據拍賣算法的價格定義,對每一個可能與狀態關聯的觀測值,計算競拍價格
其中:1為利益系數,2為代價系數,且有1+2=1,為足夠小的正數。對于階競拍價格矩陣,價格元素的行序號對應觀測值編號,列序號對應狀態編號。
則最優適應度對應的競拍價格即為全局最優值,相應粒子位置表示目標狀態粒子集與傳感器觀測值的最優關聯結果。
2.3 一種新的目標聯合檢測與跟蹤算法步驟
文中設計的基于多模粒子濾波器的聯合檢測與跟蹤算法主要包括粒子狀態預測、狀態粒子集與當前觀測值的模糊關聯判定、粒子權值更新、重采樣、目標局部狀態后驗估計、目標全局狀態融合估計,新算法的一次迭代步驟如下。
1)初始化。
在傳感器S觀測下,對于目標,在=0時刻,粒子以初始模型概率為基礎進行混合抽樣,根據被估計狀態變量初值抽取個采樣粒子,假定目標初始時刻狀態分布為,模型概率為,記采樣控制變量為(),其中,當滿足

時,則認為該時刻第個粒子所對應的采樣模型狀態為,此時,抽取采樣粒子,相應粒子權重取,最后得初始粒子集(其中,,和分別表示時刻目標的采樣粒子所對應的運動狀態、采樣模型狀態及相應權值,=1,2,…,為粒子數;為采樣粒子總數;,為模型總數)。
2)粒子狀態預測。
在?1時刻(=1,2,…),記表征目標混合狀態后驗分布的粒子集為。在預測粒子狀態時,分3種情況進行處理。
3)狀態粒子集與觀測值的模糊關聯。
4)粒子權值更新。
處理好粒子與觀測之間的關聯性,并完成狀態粒子集更新后,對每個粒子進行權值更新,并對得到的粒子權值進行歸一化處理。為了克服標準粒子濾波中僅由量測概率密度函數求得粒子權值所包含的信息量少的缺陷,對應于不同的粒子存在狀態,可以借助似然比公式進行求解[8],并依據文獻[5]中的采樣集合混合理論合并個粒子,得混合粒子集(其中,=,,=1,2,…,)。
5)重采樣。
6)目標局部狀態估計。
單純的將所有粒子的位置和權值進行加權平均求得的目標狀態估計會有較大誤差,這里考慮粒子存在變量的影響,按照每個模型的模型概率進行狀態粒子融合可以得到目標局部狀態后驗估計值和均方誤差。
則狀態后驗估計為
估計均方誤差為

在時刻,目標存在的后驗概率為
P(19)
則依據目標存在概率表達式,可得到時刻目標數目的局部估計值為
其中:Round()表示求得距離最近的整數。
因此,在觀測時間序列=1,2,…,內,對于傳感器S,目標的子航跡可表示為狀態集合,時刻估計出的目標數目為。
7)目標全局狀態估計。
假設各傳感器之間已實現時空同步處理,各個傳感器信息處理系統之間的過程噪聲、量測噪聲互不相關。由于步驟3已初步實現量測?航跡關聯的判定,對于多傳感器之間的子航跡信息,類似于步驟3中提及的模糊關聯理論,可采用基于模糊關聯矩陣的二維分配方法進行精關聯判定,完成各傳感器局部航跡信息之間的關聯問題求解。因此,對于目標,參照分布式融合結構,在信息融合中心對各傳感器輸出的目標子航跡信息進行加權融合可得
全局狀態估計值為
全局狀態估計均方誤差為
在各時刻,觀測場景中的目標數目估計值為各傳感器局部估計值中的最大值,即
文中設計的多模型粒子算法,其采樣過程中使用了一定的先驗信息和前一時刻的后驗信息,通過對多模型混合采樣得到目標狀態后驗分布粒子集,保證了粒子多樣性;算法引入了狀態粒子集?觀測值之間以及各傳感器子航跡信息之間的關聯判定,并按照每個模型的模型概率進行融合得到的多模型粒子濾波器的估計值,提高了狀態估計信息的準確性。
3 仿真與分析
為簡化問題,在二維監視區域內,假設多傳感器系統由1部雷達和1臺紅外探測器組成;假設其采樣時間同步,且已完成坐標轉換與時間對準;設定所有目標在傳感器觀測的重合區域內機動。假設觀測時間為150 s,在整個觀測期間,共有3個目標出現和消失,目標在場景中出現的時間段及相應運動狀態如表1所示。用于算法測試的硬件環境是因特爾酷睿雙核處理器、2.10 GHz主頻、2.0 GB內存、1.0 GB顯卡,軟件環境是Windows 7,Matlab R2012b。
設定目標1的初始位置為[10 500,8 000] m,初始速度為[50,180] m/s;目標2的初始位置為[12 500,15 300] m,初始速度為[154,115] m/s;目標3的初始位置為[12 100,9 300] m,初始速度為[155,88] m/s;3個目標機動轉彎均采用轉彎速率0.06 rad/s和0.07 rad/s。

表1 目標出現的時間段及相應運動狀態
為了計算方便,設公共觀測區域為[10 000,27 000] m×[4 000,21 000] m的觀測空間,對于雷達傳感器1,目標的距離單元均勻分布在[13 000,30 000] m,多普勒單元均勻分布在[?125,200] m/s,考慮只有1個方位單元的情況,分辨單元數目設為340×50×1,距離分辨率單元為50 m,多普勒分辨率單元為 6.5 m/s,掃描間隔為1 s,假設3個目標所在的初始距離?多普勒分辨單元為依次為(5,43),(137,48)和(49,48)。對于紅外傳感器2,灰度圖像在2個方向上的距離分辨單元均為100 m,分辨單元數目為170×170,掃描間隔為1 s,假設3個目標初始位置依次為(5,40),(26,114)和(23,54),速度依次為(0.5,1.8),(1.53,1.11)和(1.65,0.92) 個/s。
為驗證本文算法的有效性,使用其他2種濾波方法對場景中的機動目標進行跟蹤,算法一為文獻[15]中的經典多模粒子濾波算法,算法二為文獻[16]中的一種改進多模型粒子濾波算法。在各多模型算法中,均使用CV(constant velocity)模型和CT(constant turn)模型,各模型的狀態轉移函數表達式及過程噪聲協方差的選取見文獻[17]。
由Matlab2012b仿真得出,觀測場景中目標的運動軌跡,如圖2所示。從圖2(b)可看出各目標在不同時刻的存在狀態及相互關聯程度。
若觀測場景信噪比取為8 dB,取雷達傳感器觀測噪聲標準差為0.6,紅外傳感器觀測噪聲標準差為2.6,依據目標信噪比公式及相關參數的經驗值,可知目標由雷達傳感器獲得的回波功率信息大約為4.5,目標由紅外傳感器獲得的回波信號強度信息大約為6.5。對于雷達傳感器,在=15時,只有1個目標,位于分辨單元(46,43)處;在=65時,有3個目標,分別位于分辨單元(198,43)、(260,48)和(211,47)處;在=105時,有2個目標,分別位于分辨單元(323,16)和(229,12)處。對于紅外傳感器,在=15時,目標位于分辨單元(12,65)處;在=65時,3個目標分別位于分辨單元(42,141)、(77,151)和(96,91)處;在=105時刻,2個目標分別位于分辨單元(130,139)和(129,47)處。不同時刻雷達傳感器觀測情況如圖3(a)~3(c)所示,紅外傳感器觀測情況如圖3(d)~3(f)所示。

(a) 二維空間;(b)一維空間1—目標1;2—目標2;3—目標3。
由圖3(a)和3(d)可知:受雜波及傳感器觀測模糊的影響,目標信號均淹沒于噪聲中;由圖3(b)和3(e),3(c)和3(f)可知:當目標相距較近時,回波觀測數據相互影響,很難直接從單幀觀測圖中直接檢測出目標。因此,在信噪比較低的多目標跟蹤環境中,有必要研究考慮目標狀態與觀測數據關聯的多傳感器聯合檢測與跟蹤算法,利用幀間能量積累提高信噪比,并利用各傳感器互補信息提高目標檢測與跟蹤的精度。
為更好地驗證各算法性能,在信噪比SN分別為8 dB和3 dB的情況下,對于各時刻各機動目標,經過100次Monte Carlo仿真,圖4和圖5所示分別為不同算法對于典型目標1和2的模型概率估計,圖6和圖7所示為不同算法對于各目標的運動狀態估計誤差,圖8所示為不同算法對于目標數目的估計。

k:(a) 15;(b) 65;(c) 105;(d) 15;(e) 65;(f) 105
由圖4和圖5可以看出:在相同信噪比條件下,在對典型目標運動模型的估計準確性方面,本文算法要比算法一和算法二更優;隨著信噪比降低,各算法的運動模型概率估計準確性均有所下降,但是本文算法的估計性能變化不大且明顯比算法一和算法二的優。這是由于本文算法采用了狀態粒子集與觀測值的關聯判定,當目標相距較近以及出現運動模型切換時,該算法能快速判定粒子集與觀測值的關聯度,使得多模型粒子濾波方法可以更有效地估計目標運動模型的概率,估計效果更接近目標運動的真實模型。當目標數目發生變化時,本文算法所采用的軟判定準則不能及時判定出目標數目變化,在一定程度上影響了運動模型估計精度,但是變化間隔越短所受影響越小;而算法一和算法二的硬性判定雖然可以相對快速地檢測到目標數目變化,但在低檢測率場景中,缺乏粒子集與觀測值的關聯判定會影響目標數目的準確估計,進而導致目標運動模型的錯誤估計。
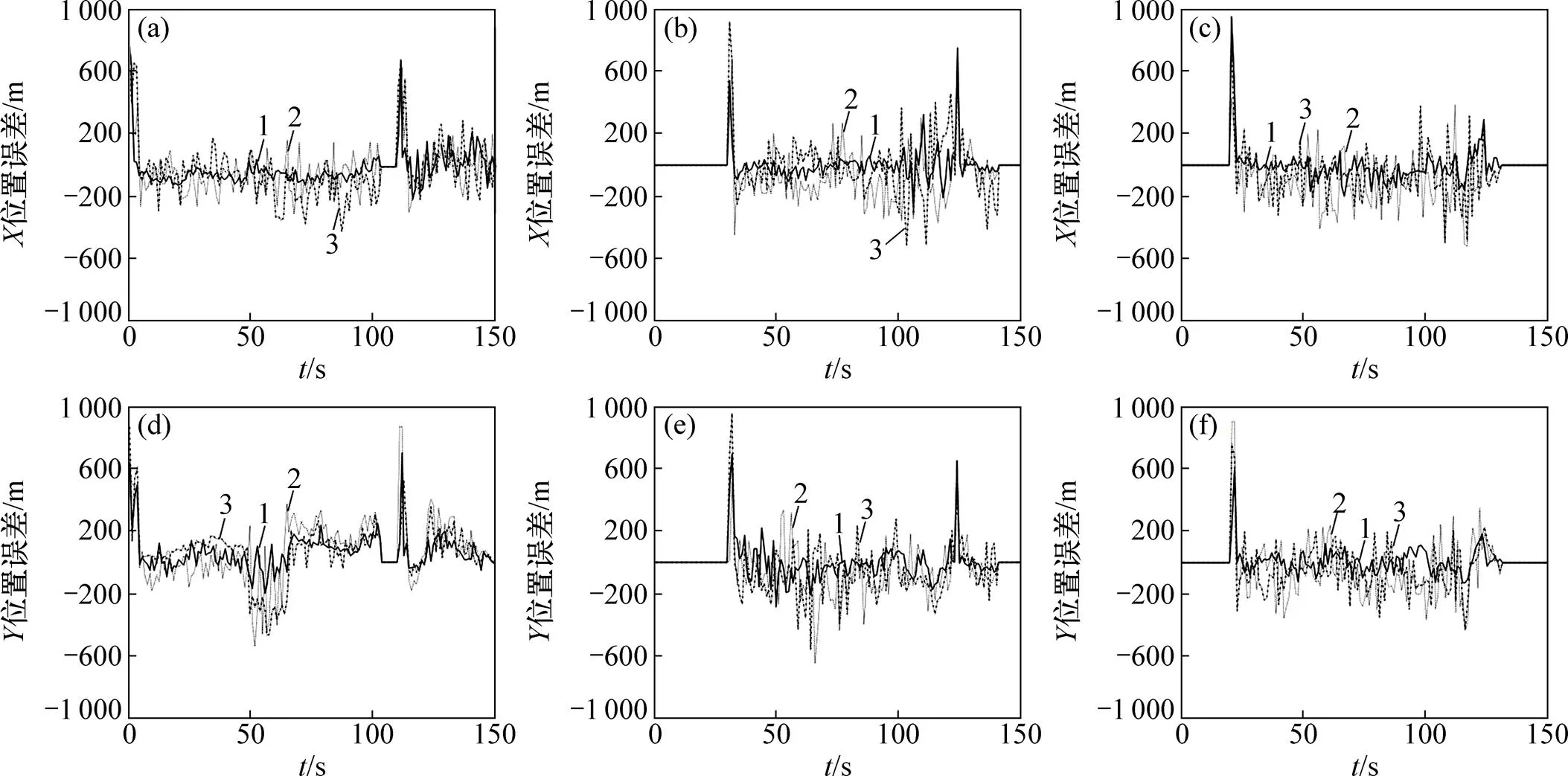
從圖6和圖7可以看出:在相同信噪比條件下,在運動狀態誤差估計方面,本文算法要優于算法一和算法二;當目標相距較近、運動模型切換或者信噪比降低時,估計誤差均會增大,但是本文算法能更快地將誤差收斂到平穩狀態,跟蹤性能明顯比算法一和算法二的優。這是因為本文算法可以有效地判定粒子狀態集與觀測值的關聯性,能很好地適應目標的機動運動狀態,進而進行較準確的狀態估計;算法一和算法二由于沒有考慮粒子集與觀測值的關聯判定,當目標運動狀態相近、運動模型切換或者信噪比降低時容易出現誤跟蹤,估計誤差明顯增大。當目標“新出現”或“消失”時,本文提出的算法所采用的軟判定準則不能及時判定出目標數目變化,在一定程度上影響了運動狀態估計精度,但是變化間隔越短,所受影響越小;而算法一和算法二的硬性判定雖然可以相對快速地檢測到目標數目變化,但當受較強雜波影響時會影響目標數目的準確估計,進而導致目標狀態的錯誤估計。

(a) 本文算法對于目標1的運動模型概率估計;(b) 算法一對于目標1的運動模型概率估計;(c) 算法二對于目標1的運動模型概率估計;(d) 本文算法對于目標2的運動模型概率估計;(e) 算法一對于目標2的運動模型概率估計;(f) 算法二對于目標2的運動模型概率估計1—CV模型;2—CT模型;3—消失狀態。

(a) 本文算法對于目標1的運動模型概率估計;(b) 算法一對于目標1的運動模型概率估計;(c) 算法二對于目標1的運動模型概率估計;(d) 本文算法對于目標2的運動模型概率估計;(e) 算法一對于目標2的運動模型概率估計;(f) 算法二對于目標2的運動模型概率估計1—CV模型;2—CT模型;3—消失狀態。

(a) 不同算法對于目標1的X方向位置狀態估計;(b) 不同算法對于目標2的X方向位置狀態估計;(c) 不同算法對于目標3的X方向位置狀態估計;(d) 不同算法對于目標1的Y方向位置狀態估計;(e) 不同算法對于目標2的Y方向位置狀態估計;(f) 不同算法對于目標3的Y方向位置狀態估計1—本文算法;2—算法一;3—算法二。
(a) 不同算法對于目標1的X方向位置狀態估計;(b) 不同算法對于目標2的X方向位置狀態估計;(c) 不同算法對于目標3的X方向位置狀態估計;(d) 不同算法對于目標1的Y方向位置狀態估計;(e) 不同算法對于目標2的Y方向位置狀態估計;(f) 不同算法對于目標3的Y方向位置狀態估計1—本文算法;2—算法一;3—算法二。
由圖8可以看出:在相同信噪比條件下,在對目標數目的估計方面,本文算法能夠較準確地估計目標數目,但是由于在判定目標出現與消失時采用了軟判斷準則,當目標數目發生變化時,不能即刻判定新目標出現或現有目標消失,估計出的目標數目相比于實際數目有些時間延遲;算法一由于沒有考慮目標是否存在的判定,在目標數目發生變化時能及時作出判定,但是由于沒有考慮目標狀態與觀測數據的關聯性,當目標相距較近或者信噪比較低時,容易出現誤跟蹤及目標數目估計不準確的情況;算法二考慮了目標是否存在的判定,所采用的硬判斷準則能夠在一定程度上對目標數目的變化作出判定,但是受雜波影響,容易出現判定失誤,并且由于沒有考慮目標狀態與觀測數據的關聯性,當目標相距較近或信噪比較低時,也容易出現誤跟蹤及目標數目估計不準確。對比圖8(a)和8(b)可以看出:隨著信噪比降低,各算法的目標數目估計準確性均有所下降,但是本文算法能更好地適應較低的信噪比環境,估計性能變化不大且明顯比算法一和算法二的優。

SN/dB:(a) 8;(b) 3 1—實際數目;2—本文算法估計的目標數目;3—算法一估計的目標數目;4—算法二估計的目標數目。
圖8 不同信噪比條件下各時刻不同算法估計的目標數目
Fig. 8 Estimated target number with different algorithms at each moment under different SNR conditions
從以上仿真試驗及分析結果可以看出:在相同信噪比條件下,本文算法的檢測與跟蹤性能均比經典多模粒子濾波算法的優;隨著信噪比降低,各算法的檢測與跟蹤性能均有所下降,但是本文算法的檢測與跟蹤性能仍優于經典多模粒子濾波算法。這主要是因為本文算法通過引入狀態粒子集與當前觀測值的模糊關聯性判定,給出了目標出現與消失的軟判定準則,并由混合采樣得到包含模型信息和狀態信息的粒子集,實現了對目標運動模型及狀態變化的精確估計,有效提高了目標跟蹤精度。
仿真實驗中,在各算法的計算量對比上,使用單次運算所需消耗的CPU平均時間來表示,通過100次Monte Carlo仿真,給出3種算法每次迭代所需消耗的平均時間,各算法單次平均耗時的比較結果如表2所示。

表2 單次運算所需平均時間
由表2可以看出:算法一和算法二單次運算所需平均時間均比本文算法的大,本文算法的計算復雜性相對較低。這是因為本文算法增加了關聯信息判定與目標數目變化的評判,但也相應地減少了無關信息的采樣,算法復雜度沒有明顯增加。
4 結論
1) 在多模粒子濾波的框架基礎上給出了一種新的目標聯合檢測與跟蹤算法。該算法在粒子狀態預測與更新步驟中,依據粒子存在變量進行預測粒子狀態集的采樣,考慮狀態粒子集與當前觀測值的模糊關聯程度,給出目標出現與消失的判定準則,依據混合采樣方法得到包含模型信息和狀態信息的粒子集,實現了對目標運動模型及狀態變化的準確估計;同時,考慮粒子存在變量影響和目標模型概率,得到各傳感器各目標的融合狀態估計值,優化了目標跟蹤性能。
2) 在低信噪比條件下,新算法能有效處理目標相距較近或者目標數目發生變化的機動目標檢測與跟蹤。
參考文獻:
[1] BOERS Y, DRIESSEN H, TORSTENSSON J, et al. Track-before-detect algorithm for tracking extended targets[J]. IEEE Proceedings of Radar, Sonar and Navigation, 2006, 153(4): 345?351.
[2] 胡士強, 敬忠良. 粒子濾波原理及其應用[M]. 北京: 科學出版社, 2010: 89?105. HU Shiqiang, JING Zhongliang. The theory of particle filter and its application[M]. Beijing: Science Press, 2010: 89?105.
[3] MCGINNITY S, IRWIN G W. Multiple model bootstrap filter for maneuvering target tracking[J]. IEEE Transactions on Aerospace and Electronic systems, 2000, 36(3): 1006?1012.
[4] BOERS Y, DRIESSEN J N. Interacting multiple model particle filter[J]. IEEE Proceedings of Radar, Sonar and Navigation, 2003, 150(5): 344?349.
[5] DAVEY S J, GORDON N J, SABORDO M. Multi-sensor track-before-detect for complementary sensors[J]. Digital Signal Processing, 2011, 21(5): 600?607.
[6] 王曉, 韓崇昭. 基于混合采樣的多模型機動目標跟蹤算法[J]. 自動化學報, 2013, 39(7): 1152?1156. WANG Xiao, HAN Chongzhao. A multiple model particle filter for maneuvering target tracking based on composite sampling[J]. Acta Automatica Sinica, 2013, 39(7): 1152?1156.
[7] 吳瑕, 陳建文, 鮑拯, 等混合估計多模粒子濾波的機動弱目標檢測前跟蹤算法[J]. 控制與決策, 2014, 29(3): 523?527. WU Xia, CHEN Jianwen, BAO Zheng, et al. Track-before-detect for maneuvering weak target based on mixture estimation of multi model particle filter algorithm[J]. Control and Decision, 2014, 29(3): 523?527.
[8] WANG Guohong, TAN Shuncheng, GUAN Chengbin, et al. Multiple model particle filter track-before-detect for range ambiguous radar[J]. Chinese Journal of Aeronautics, 2013, 26(6): 1477?1487.
[9] 鑒福升, 徐躍民, 陰澤杰. 改進的多模型粒子濾波機動目標跟蹤算法[J]. 控制理論與應用, 2011, 27(8): 1012?1016. JIAN Fusheng, XU Yuemin, YIN Zejie. Enhanced multiple model particle filter for maneuvering target tracking[J]. Control Theory and Applications, 2011, 27(8): 1012?1016.
[10] YANG T, BLOM H A P, MEHTA P G. Interacting multiple model-feedback particle filter for stochastic hybrid systems[C]//2013 IEEE 52nd Annual Conference on Decision and Control (CDC). Florence: IEEE, 2013: 7065?7070.
[11] HUANG Dayu, XUE Anke, GUO Yunfei. A Particle filter track-before-detect algorithm for multi-radar system[J]. Electronics and Electrical Engineering, 2013, 19(5): 3?8.
[12] ZHANG G, YANG C, ZHANG Y. A Track-before-detect method based on particle filters for target detection[J]. Journal of Computational Information Systems, 2013, 9(18): 7281?7289.
[13] ZAVLANOS M M, SPESIVTSEV L, PAPPAS G J. A distributed auction algorithm for the assignment problem[C]//2008 IEEE 47th Conference on Decision and Control (CDC). Cancun: IEEE, 2008: 1212?1217.
[14] POLI R, KENNEDY J, BLACKWELL T. Particle swarm optimization[J]. Swarm Intelligence, 2007, 1(1): 33?57.
[15] BOERS Y, DRIESSEN J N. Interacting multiple model particle filter[J]. IEEE Proceedings: Radar, Sonar and Navigation, 2003, 150(5): 344?349.
[16] 龔亞信, 楊宏文, 胡衛東, 等. 基于多模粒子濾波的機動弱目標檢測前跟蹤[J]. 電子與信息學報, 2008, 30(4): 941?944. GONG Yaxin, YANG Hongwen, HU Weidong, et al. Multiple model particle filter based track-before-detect for maneuvering weak target[J]. Journal of Electronics and Information Technology, 2008, 30(4): 941?944.
[17] ZHAI Y, YEARY M B, CHENG S, et al. An object-tracking algorithm based on multiple-model particle filtering with state partitioning[J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(5): 1797?1809.
(編輯 趙俊)
New method for joint detection and tracking with variable maneuvering target number
HU Xiuhua, GUO Lei, LI Huihui, YAN Pandeng
(College of Automation, Northwestern Polytechnical University, Xi’an 710129, China)
Aiming at the problem of low target tracking performance with the variable number of maneuvering target, a new joint detection and tracking algorithm was put forward for the environment of low signal-to-noise ratio multi-sensor observation. The sampling of predict state particle set was completed according to the existence of the particle. And then, taking the association degree of the sets of particle state and the current observations into account, and using the theory of fuzzy auction algorithm and particle swarm optimization, the association problem between the state and observation sets was solved, and the criteria of target appear and disappear was given, and the updating of particle weight was realized. By the means of composite sampling, the sample particle sets with the model information and status information was obtained, and the local posteriori estimate and the mean square error of target state were given with the target model probability through particle state fusion. Finally, with the weighted fusion of each associated local sensor tracking information, the global state estimation of each target was obtained and compared with the simulation experiment with classical multiple model particle filter algorithm. The results show that the new algorithm is effective in motion model probability estimation, state estimation, and the target number estimation.
multi-model particle filter; detection and tracking; associated determination; target; composite sampling
10.11817/j.issn.1672-7207.2016.10.020
TP391
A
1672?7207(2016)10?3424?12
2015?10?03;
2016?01?17
國家自然科學基金資助項目(60802084);武器裝備預先研究基金資助項目(51306030205) (Project(60802084) supported by the National Natural Science Foundation of China; Project(51306030205) supported by the Weapons and Equipment Research Funds in Advance)
胡秀華,博士研究生,從事多傳感器目標融合檢測、跟蹤與識別研究;E-mail:huxhnwpu2010@163.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
