智能膝關節假肢研究現狀及發展趨勢①
2016-10-15 03:52:38顧洪李偉達李娟
中國康復理論與實踐 2016年9期
顧洪,李偉達,李娟
智能膝關節假肢研究現狀及發展趨勢①
顧洪,李偉達,李娟
隨著下肢截肢患者的增多以及微電子、控制等技術的不斷發展,智能下肢假肢逐漸成為康復機器人領域的研究熱點。作為下肢假肢系統的核心部件,高性能的膝關節假肢設計仍然是當前假肢設計中的主要技術難點。本文介紹國內外智能膝關節假肢的發展歷程及研究現狀,從結構設計的角度對現有膝關節假肢進行分類,分析當前膝關節假肢設計中存在的問題,最后探討膝關節假肢的發展趨勢。
智能假肢;膝關節假肢;設計;綜述
[本文著錄格式]顧洪,李偉達,李娟.智能膝關節假肢研究現狀及發展趨勢[J].中國康復理論與實踐,2016,22(9):1080-1085.
CITED AS:Gu H,LiWD,Li J.State-of-the-artand developmentof intelligent knee prosthesis(review)[J].Zhongguo Kangfu Lilun Yu Shijian,2016,22(9):1080-1085.
第二次全國殘疾人抽樣調查顯示,我國截肢者約為226萬,占殘疾人數的8%[1]。在63萬迫切需要安裝假肢的截肢者中,下肢截肢者約44萬,占70%[1]。假肢是截肢者重要的運動功能替代工具,是為彌補截肢者肢體缺損,代償肢體功能而制造、裝配的人工肢體[2]。下肢假肢,尤其是膝關節假肢的普及和安裝,是當前解決截肢者基本需要的一項迫切任務。
膝關節是一種高度非線性、時變、強耦合的系統[3]。作為下肢假肢最重要的部分,智能膝關節假肢要能夠根據步態變化自動調節參數,保證關節在支撐期有較好的穩定性,在擺動期有較好的靈活性,對智能膝關節假肢的設計和控制提出較高要求,是當今下肢假肢設計的難點。
1 智能膝關節假肢發展歷程及現狀
1.1國外智能膝關節假肢發展歷程
20世紀70年代初,Flowers等開始對微處理器控制假肢膝關節技術進行研究,致力于對健康腿信息反饋式假肢樣機的設計[4]。80年代開始,M yers等嘗試將肌電信號應用于膝關節假肢控制[4]。1986年,中川昭夫等提出利用微處理器控制針閥,構想基于微處理器的氣動式擺動相控制膝關節[5]。1990年,英國Blatchford公司獲得中川昭夫的許可,其工程師Zahedi于1993年研制出世界上第一款微處理器控制的智能假肢IP(Intelligent Prosthesis),并在對IP性能進行完善后于1994年研制出了IP+[4-5]。1994年,日本NABCO公司研制出類似于IP+的膝關節NI-C111[5-6]。以上智能假肢均只對擺動相進行控制,并且根據預先算好存入控制器的參數進行調整。
1997年,德國OTTO BOCK公司發明C-Leg智能仿生腿,利用膝關節角度和踝關節力矩判斷假肢擺動的速度和位置,通過調節液壓缸阻尼來保證行走過程中的穩定和安全[5,7]。1998年,ENDONITE公司研制Adaptive Knee,該假肢站立相由液壓驅動,擺動相由氣壓驅動;之后推出新版本Adaptive2[7]。2001年,冰島OSSUR公司推出仿生磁控膝關節Rheo Knee[7],利用陀螺儀等傳感器分析足部運動信息,從而控制智能膝關節運動[5]。以上智能假肢能夠根據傳感器計算、估計當前步態,對關節參數實時進行調整,做到閉環控制;對站立相和擺動相均能進行控制。
2006年,OSSUR公司研制出世界上第一款主動型人工智能假肢POWERKNEE。該假肢采用電機驅動,代替原有的腿部肌肉實現假肢的主動彎曲伸展功能,克服了阻尼式假肢無法主動做功的缺陷,能更好實現上樓梯等需要主動做功的步態。該假肢目前也是市場上唯一一款動力腿[5,7]。之后OTTO BOCK公司在C-Leg基礎上推出了智能仿生膝關節Genium,能夠完成越障、交替上下樓梯等較為復雜的動作,行走步態也更為自然[]。
近年來,國外智能膝關節產品見表1[10-12]。
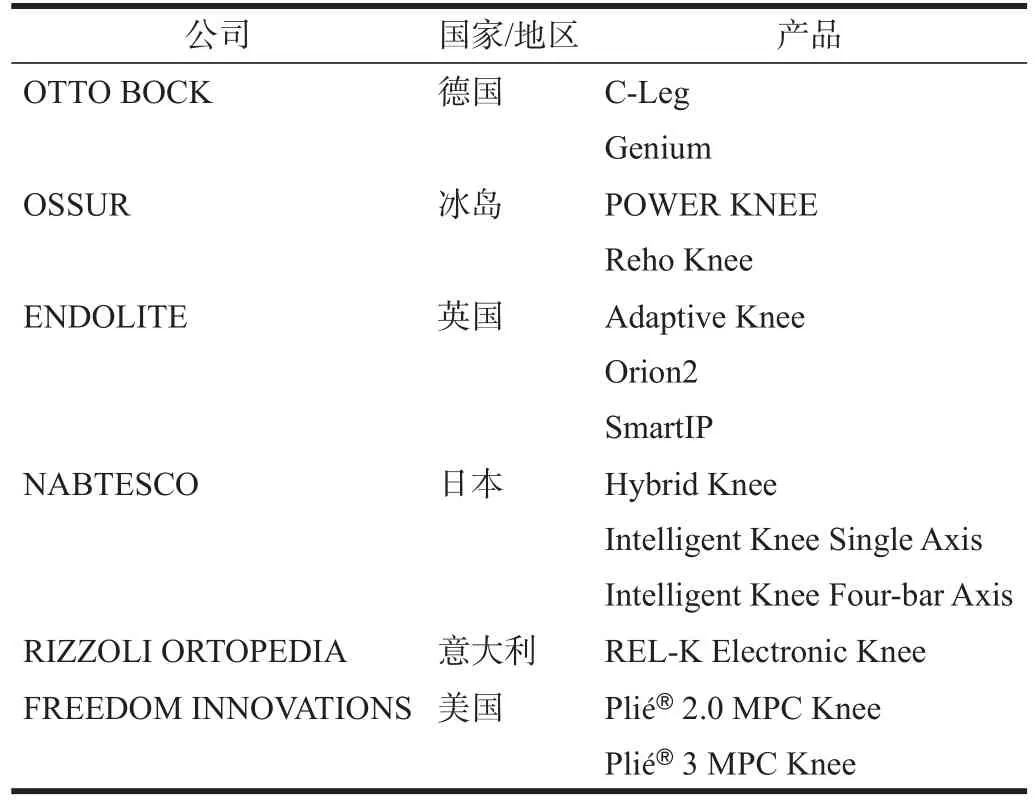
表1 國外現有智能膝關節假肢產品
1.2國內智能膝關節假肢發展歷程
我國對智能膝上假肢的研究始于20世紀80年代初。清華大學在國家自然科學基金資助下,開展電流變液和電動摩擦錐膝關節自適應阻尼控制裝置的研究,并且在下肢假肢建模及其肌電控制方法方面進行大量的研究[13-14]。金德聞等設計六連桿假肢[15],對多軸膝關節穩定性進行研究。上海理工大學喻洪流等設計基于小腦模型神經網絡控制器的智能膝上假肢,設計了假肢膝關節電控液壓缸,在健肢上安裝便攜式檢測機構得到膝關節角度,從而控制假肢步態[16]。中南大學譚冠政等研制出智能仿生人工腿CIP-ILeg,設計出一種基于非線性PID控制的人工腿位置伺服控制系統,利用霍爾傳感器判斷步速,通過調節針閥位置改變氣壓阻尼來適應步速[17]。北京大學王啟寧等設計出基于動態行走機理的“機器人假肢”,利用腳底壓力傳感器系統探測健腿的行走狀態,從而控制假肢的狀態[5]。東北大學徐心和等對磁流變液智能假腿進行研究,通過步態感知系統得到假肢擺動相的各種信息及理想步態,通過調節阻尼力矩實現擺動相膝力矩的自動控制[18]。河北工業大學楊鵬等對人體下肢表面肌電信號進行采集和模式識別,研制氣動膝關節原型樣機[5]。
近年來,國內市場也出現自主研發的智能膝關節假肢產品,見表2。臺灣德林假肢有限公司推出三款多連桿大腿智能假肢產品,其中V One為四連桿假肢,TGK-5PSOIC、ADLIB為五連桿假肢。2009年河北工業大學、清華大學以及國家康復輔具研究中心在“十一五”計劃支持下研發氣壓四連桿智能膝關節,已由北京精博現代假肢矯形器技術開發公司小批量生產并作為福康工程配發[19]。北京東方瑞盛假肢矯形器發展技術有限公司也有一款自主研發的氣壓四連桿智能膝關節。
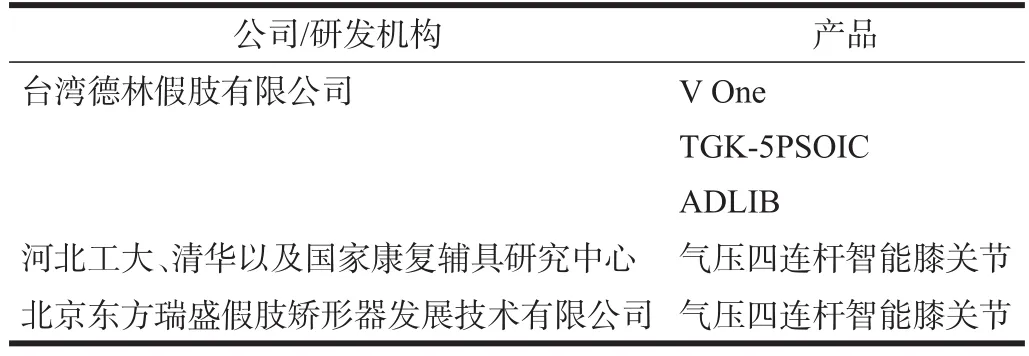
表2 國內現有智能膝關節假肢產品
我國在假肢研究方面起步較晚,與歐美、日本等發達國家相比仍然存在較大差距。但是對智能下肢假肢,特別是膝關節假肢的研究發展迅速,國內許多高校和機構均展開了相應研究,并取得一定成果。目前,國外智能假肢產品技術比較成熟,價格較為昂貴[12],國內假肢公司仍無法滿足患者對高性能假肢的需求。
1.3現有智能膝關節假肢現狀
現階段全世界智能假肢產品多種多樣,處于實驗室研究階段的假肢樣機更是種類繁多。下面按照關節驅動方式、驅動類型、轉軸結構等對智能膝關節假肢進行分類闡述[6,20]。
1.3.1關節驅動方式
智能膝關節假肢按照關節驅動方式可分為主動型和被動型。
主動型假肢主要以電機作為動力源,能夠代替腿部肌肉提供力矩,使膝關節主動彎曲、伸展。但電機自重大、能量轉化率低、功耗高,運行時噪聲大;電池容量小、體積重量大、續航短,這些問題是主動型假肢產品面臨的主要技術難題。市場上唯一的一款主動型假肢產品是OSSUR公司的POWER KNEE。也有研究機構用氣壓、液壓作為動力源進行主動型假肢的研究[21]。主動型膝關節假肢的分類見表3。
被動型假肢(也稱為阻尼式假肢)不提供主動力矩,行走時通過大腿殘肢帶動假肢小腿擺動實現行走。假肢根據外界條件的變化調節膝關節阻尼力矩實現步態調整。由于控制方式相對簡單,實現難度相對較小,同時能耗相對較低,市場上主流產品均為被動阻尼式假肢。
1.3.2驅動類型
阻尼式假肢按照驅動類型可以分為氣壓、液壓、磁流變、電流變、機械摩擦等(表4)[6]。阻尼式假肢提供的阻尼可以分為流體阻尼和摩擦阻尼兩種。其中,氣壓和液壓的阻尼原理類似,通過調節閥門開度大小改變流體的阻尼。由于氣體壓縮性較大,氣壓提供的阻尼力矩較小、阻尼器動作較快,適用于擺動相;液壓能提供較大的阻尼力矩,既適用于支撐相也適用于擺動相。
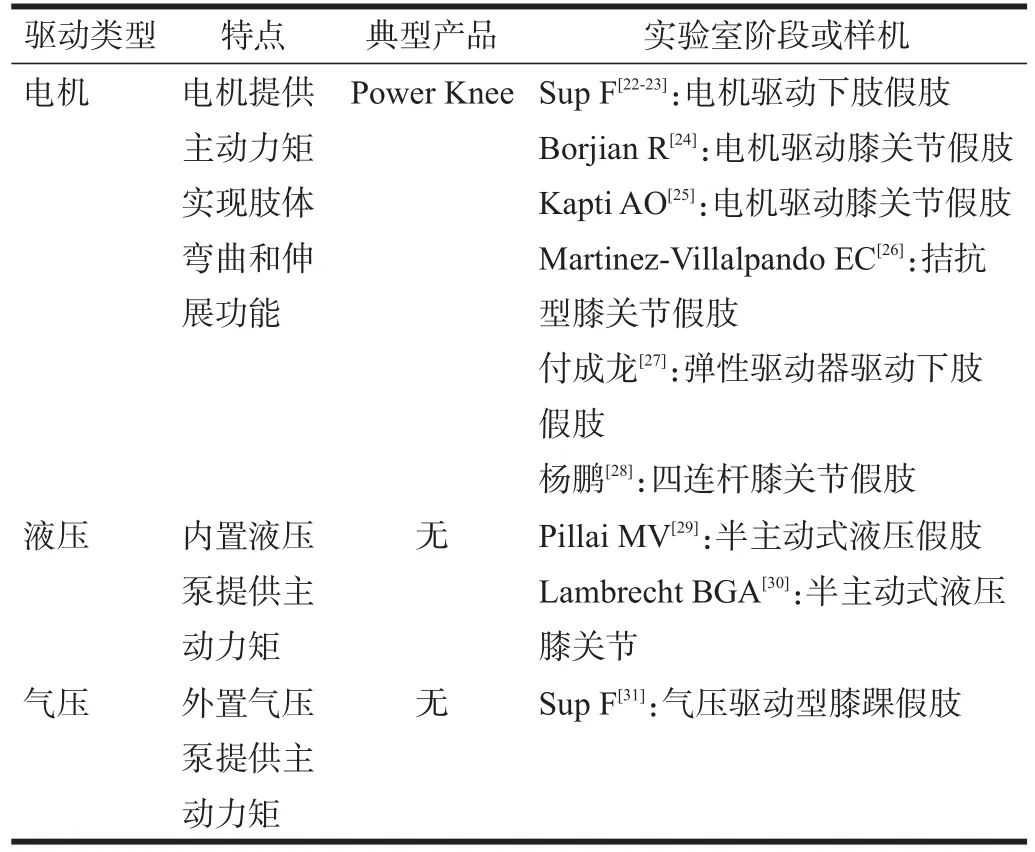
表3 主動型膝關節假肢及其分類
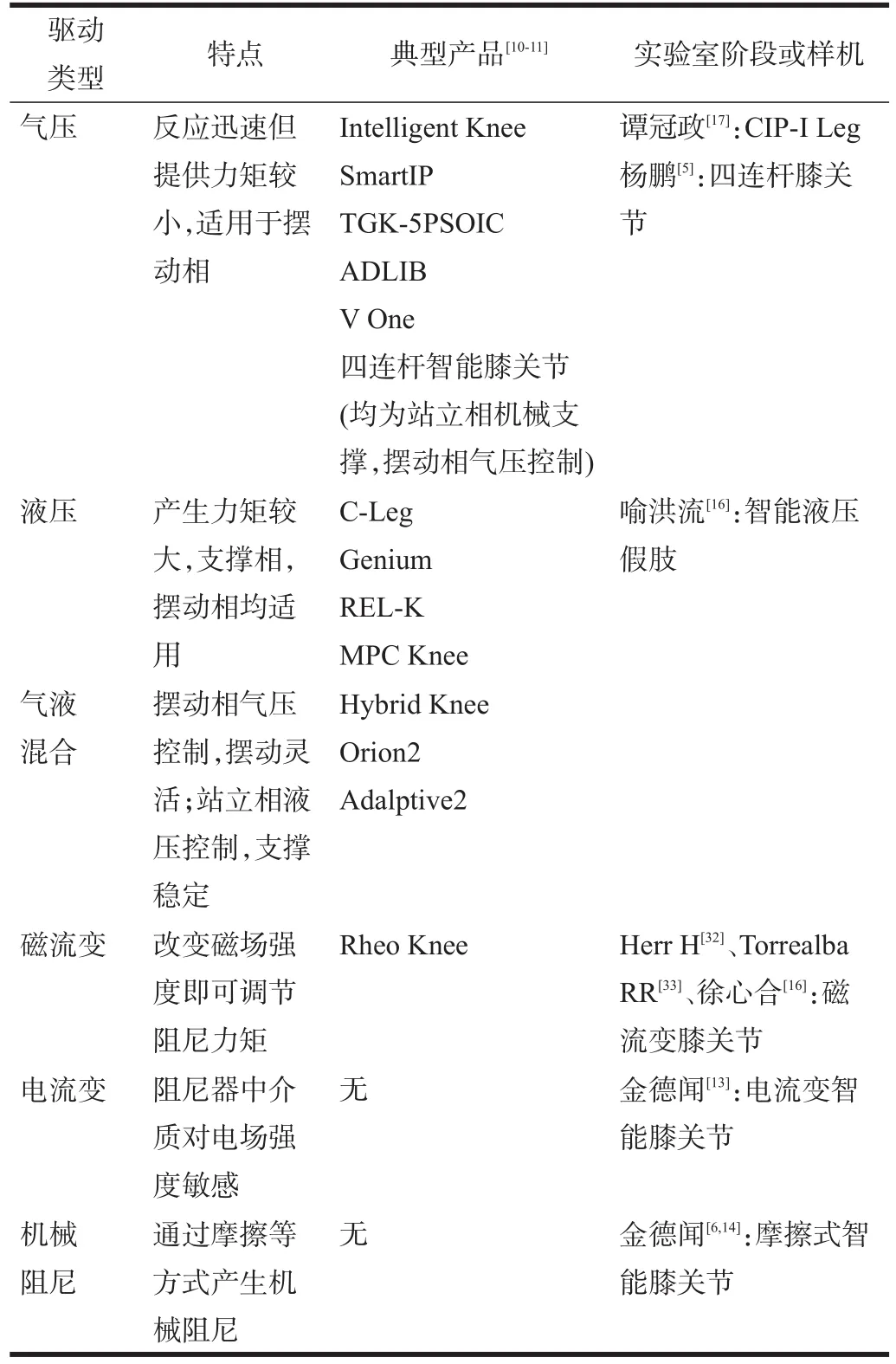
表4 阻尼式膝關節假肢及其分類
磁流變和電流變阻尼假肢的原理是在不同磁場、電場的作用下,磁流變液和電流變液的黏性不同,改變磁場強度或電場強度即可改變流體的阻尼,這種類型阻尼器不需機械執行機構,對調節的反應也更加迅速。市場上已經有磁流變假肢產品出現,但電流變假肢由于技術原因仍在實驗室階段。
摩擦阻尼式假肢通過調節機構來產生摩擦阻尼,但實現準確穩定的力矩控制以及建立準確的數學模型均有很大難度,現在還沒有摩擦式智能膝關節產品[6]。
1.3.3轉軸結構
膝關節假肢按照結構可以分為單軸假肢和多連桿假肢。
單軸膝關節只有單個回轉軸,在擺動期的靈活性較高,但支撐期不夠穩定。由于結構比較簡單,模型的建立比較容易,同時也能夠允許假肢實現較復雜的運動,現有的智能膝關節假肢產品除了IntelligentKnee(Four-barAxis)以及國內的氣壓多連桿假肢之外,均為單軸結構;在實驗室研究中,單軸膝關節的研究也占主要部分。
多軸膝關節大多為多連桿膝關節(四連桿、五連桿或六連桿),多連桿機構的設計使轉動中心可以以一定的軌跡移動,更加符合人體正常行走時膝關節轉動中心的變化,在伸展時轉動瞬心可以大大高于轉動軸,彎曲時快速下降至轉軸附近,使其伸展靈活,同時支撐期也能保持穩定。
智能多連桿假肢大多采用四連桿結構,NABTESCO公司的IntelligentKnee(Four-bar Axis)、臺灣德林公司的V One以及北京精博的假肢是已經產品化的四連桿智能假肢;河北工業大學的楊鵬等則分別研究了氣壓、電機驅動的四連桿膝關節[5,28]。臺灣德林公司也研發了五連桿智能假肢TGK-5PSOIC以及ADLIB智能假肢。
2 存在的問題
現有智能膝關節假肢產品大多為被動阻尼式假肢,雖然能夠實現平地行走,甚至上下坡、上下樓梯、越障等動作,但無法提供主動力矩,同時與人體正常步態仍有較大差距[34-37],在步態的對稱性以及自然性方面還需進一步提高[38]。現有假肢通過利用步速、力矩、角度等運動動力學信息判斷人體行走的模式進行控制,對假肢穿戴者的運動意圖還不能準確有效識別[5],嚴格意義上只能說是微控制器控制假肢,不能真正做到“智能”,假肢與人體的協調控制還需要提高。
主動式假肢能夠提供主動力矩以實現上下樓梯、上下坡等功能,但目前主動式膝關節假肢的研究大多在實驗室階段。現有的唯一主動膝關節假肢產品為Ossur公司的Power Knee。該假肢以電機作為驅動器,耗能較大、同時也會產生噪聲,電池有較大的體積和重量,未廣泛使用。實驗室對于主動式假肢的研究也只是假肢運動功能的實現,對于質量、體積、能耗等因素考慮較少,離實際使用還有很大距離。人體和膝關節兩系統的協調控制也是動力型膝關節研究的重點與難點。體積、質量、結構、能耗、續航以及較復雜的控制技術成為限制主動式假肢的主要因素。
3 研究趨勢
3.1主被動混合驅動
為彌補被動阻尼式假肢無法提供主動力矩的不足,同時利用其在無需主動力矩情況下較好的阻尼性能,研究人員嘗試將主動驅動與被動驅動相結合,設計主被動混合驅動,或半主動的智能假肢。這樣的設計也符合人體正常的行走規律:在正常行走過程中,膝關節大部分時間充當阻尼器,只有在上坡、上樓梯等需要主動力矩的情況下才主動發力做功。
伯克利大學的Lambrecht[30]和Pillai[29]分別研制了半主動式膝關節假肢和膝踝關節假肢。使用液壓泵作為動力源,設計液壓回路將主動和被動兩種控制方式結合在一起。這兩款假肢通過控制伺服閥實現主動力矩輸出狀態、被動液壓阻尼狀態等狀態之間的切換,最終實現主被動混合控制。
東北大學聞時光等將磁流變阻尼器與直流電機相結合,以滾珠絲杠進行傳動,設計出混合驅動四連桿膝關節[39]。假肢行走時主要使用磁流變阻尼器,利用其阻尼特性實現正常行走步態;當要進行上樓等需要主動力矩的動作時,電機再介入。哈爾濱工業大學的吳波等對基于磁流變阻尼器的四連桿混合驅動智能假肢進行了結構設計和仿真分析[40]。
3.2膝踝一體化設計
目前,市場上針對大腿截肢患者的解決方案一般為智能膝關節假肢和被動機械式踝關節假肢以及假腳的組合,或者智能膝關節假肢和智能踝關節假肢的簡單組合。實驗室大多數單獨對膝關節或踝關節進行研究并設計假肢。以上設計在步態等性能上與正常行走特征有很大差距。正常行走是膝關節和踝關節相互耦合作用,因此較好的方式是將膝關節的設計與踝關節的設計結合起來,同時考慮膝、踝關節的運動,進行膝踝一體化設計。見表5。
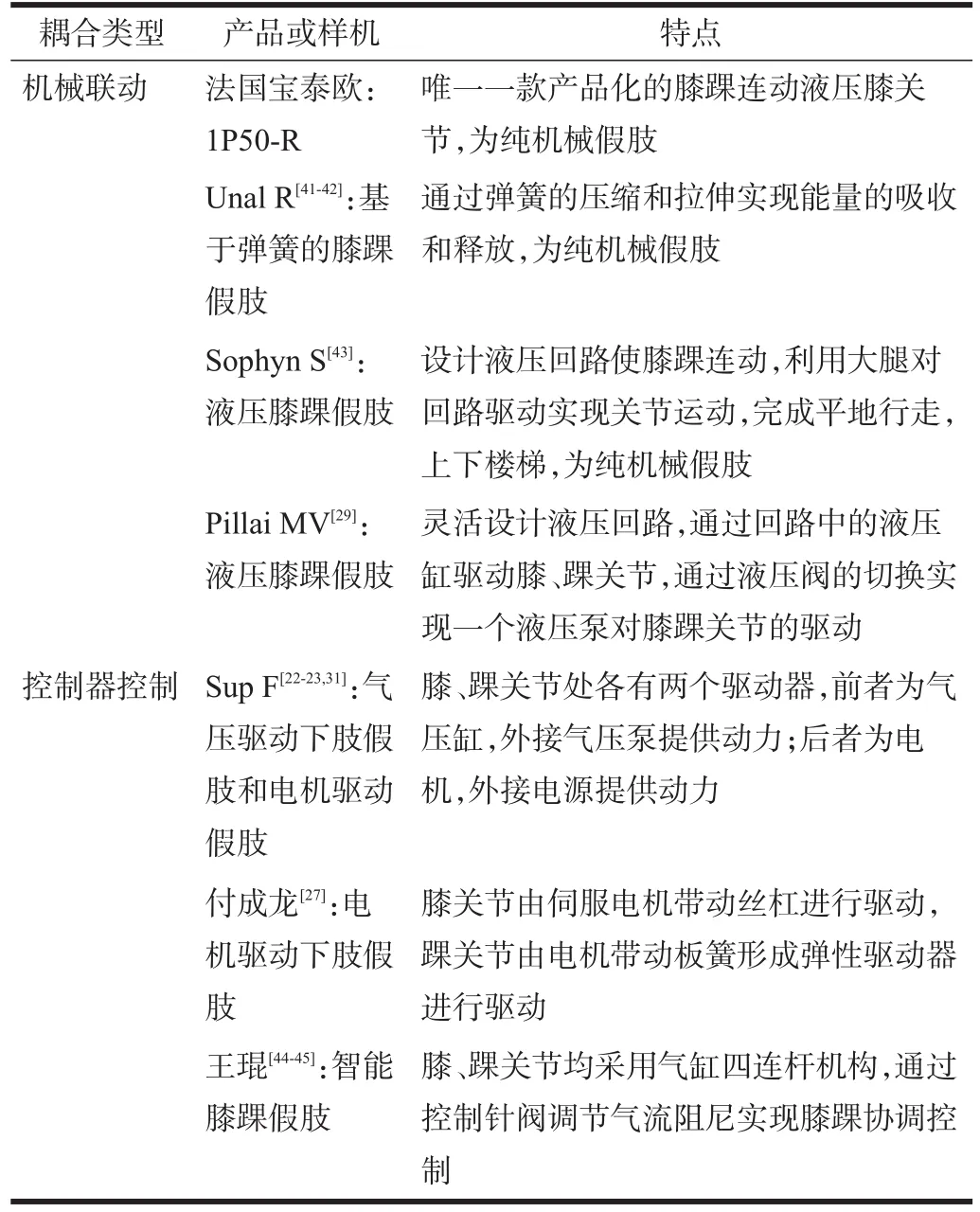
表5 膝踝耦合一體化假肢產品及樣機分類
膝踝一體化設計,即膝踝耦合聯動的設計,主要包括兩種方式:通過機械結構進行耦合,或者通過控制系統協調運動。前者通過機械結構將膝、踝兩個關節連接在一起,使兩者按一定的關系進行運動,但兩個關節只有一個自由度,運動關系單一且不能靈活變化,通常用于純機械結構式假肢設計;后者的膝、踝關節可以獨立運動,通過控制系統按照人體正常步態規律對兩個關節共同控制,實現協調耦合運動;優點在于膝踝運動關系靈活,可以適應不同步態的要求,難點在于膝踝關節的協調控制。
3.3步態周期內能量的收集與利用
為了更好完成復雜的膝關節功能,需要有電機提供主動力矩。限制電機使用的重要原因之一是能耗太大。有學者從下肢假肢步態周期內膝、踝關節做功以及能量的流動入手進行研究[42]。膝、踝關節能量的分布主要有一個能量產生部分G以及三個能量的吸收部分A1、A2、A3。在從腳跟觸地開始的站立相中,膝關節既吸收能量也釋放能量,平均能量為0,踝關節一直被動彎曲吸收能量(A3)部分;在蹬地階段,踝關節產生蹬地的主要的動能G,膝關節彎曲吸收能量(A1);在擺動相,膝關節產生伸展阻尼繼續吸收能量(A2),踝關節在這一階段的能量可以忽略。可見在正常步態周期中,膝關節主要是能量吸收部位,踝關節主要是能量生成部位,生成能量G的大小與A1、A2、A3的總和基本相同。
根據上述原理,Unal等設計一款能夠存儲和釋放能量的純機械下肢假肢,以減少人體行走時能量的消耗。他們使用3個彈簧,利用彈簧的特性以及所設計機構的特點將行走時所吸收的能量A1、A2、A3吸收,并轉移至蹬地時釋放(G),實現能量內部的自流動,減少對外部能量的需求[41-42]。Arnout等使用拉簧、壓簧、繩線以及棘輪設計下肢假肢,并利用膝、踝關節在角度、力矩等關系進行耦合,將膝關節在站立相吸收的能量轉移至踝關節,為蹬地時提供能量[46]。
Andrysek[47]和Rarick[48]等利用電磁馬達作為發電機時可以對電池進行充電的特性,行走時利用電磁馬達收集能量為電池充電,從而減少對電池人工充電的次數,延長使用時間;同時研究電磁馬達在不同電路負載下的阻尼特性,以在擺動相內利用。這為研究行走時能量收集重利用提供了另一種思路。
3.4彈性驅動器的使用
電機的剛性以及較大的能量耗散是主動式假肢設計中需要克服的難題。串聯彈性驅動器SEA(series-elastic actuator)相對電機有許多優勢:可以降低假肢對能量峰值的需求、更好地模擬人體肌肉運動。較好的人工交互性能使假肢具有較好的柔性和適應性,從而提高穿戴者的舒適性[49]。研究者將彈簧等柔順機構引入假肢的設計中,設計彈性驅動器。
Martinez-Villalpando等模擬人體膝關節的結構設計拮抗型膝關節假肢,兩個彈性驅動器模擬膝關節的肌肉使膝關節進行彎曲和伸展[26]。Rouse等設計可分離的串聯彈性驅動器CSEA(Clutchable series-elastic actuator)并將其用于主動式膝關節假肢設計中[50]。這兩種設計均降低了能量消耗。
付成龍等設計的主動型假肢的踝關節利用伺服電機連接板簧,形成彈性驅動器[27]。Sup等在主動型假肢的設計中也增加了彈簧以儲存能量。
3.5生物電信號的研究和利用
目前,根據系統的傳感器及相關的數據處理,還無法較好識別假肢穿戴者的運動意圖,人、假肢以及環境三者間不能進行有效的信息交互與協調控制,也就難以實現在多種路況、不同步速、不同行走階段情況下的理想控制效果[5]。未來智能下肢假肢將突出對人體生物信號的利用,包括肌電、腦電、心電信號等。結合人體的運動學信息以及運動規律,完成假肢穿戴者與智能假肢之間的信息交互和反饋,提高步態的自然性、對稱性以及對環境的適應能力。
4 總結
國外膝關節假肢研究起步較早、技術成熟,市場上有多種智能假肢產品;國內研究起步較晚,但近年來發展迅速,許多高校及研究機構進行了研究,市場上也出現自主研發的產品。
根據主/被動驅動方式、驅動類型以及關節轉軸數量分別對假肢進行分類比較,指出現有假肢無法提供主動力矩、步態與正常人體步態仍有較大差距等問題,進而介紹針對這些問題進行研究的現狀及趨勢,發現隨著技術的進一步提高以及研究的深入,既能提供主動力矩又有很好的阻尼性能,能量循環利用率高的膝踝一體假肢是今后的研究方向。在控制方式上,利用肌電、腦電等人體生物信號以及人體動力學、運動學信息對人體步態模式識別和環境信息判斷,結合智能控制技術實現自然、對稱的步態,也將成為未來假肢研究的熱點。
[1]劉志泉.我國肢體殘疾人概況和假肢生產供應情勢[C].北京:第二屆北京國際康復論壇,2007:382-386.
[2]王文俊.基于映射模型的假肢膝關節控制方法研究[D].蘇州:蘇州大學,2013.
[3]馬玉良,徐文良,孟明,等.基于神經網絡的智能下肢假肢自適應控制[J].浙江大學學報:工學版,2010,44(7):1373-1376.
[4]趙洪濤.CIP-I智能人工腿步速控制系統的研制[D].長沙:中南大學,2007.
[5]楊鵬,劉作軍,耿艷利,等.智能下肢假肢關鍵技術研究進展[J].河北工業大學學報,2013,42(1):76-80.
[6]王人成,沈強,金德聞.假肢智能膝關節研究進展[J].中國康復醫學雜志,2007,22(12):1093-1094.
[7]Torrealba RR,Fernándezlópez G,Grieco JC.Towards the developmentof knee prostheses:review of current researches[J]. Kybernetes,2008,37(9-10):1561-1576.
[8]Lura DJ,Wernke MM,Carey SL,et al.Differences in knee flexion between the Genium and C-Legmicroprocessor knees while walking on level ground and ramps[J].Clin Biomech,2015,30(2):175-181.
[9]Malte B,Thomas S,Eva L,et al.Immediate effects of a new microprocessor-controlled prosthetic knee joint:a comparative biomechanicalevaluation[J].Arch PhysMed Rehabil,2012,93(3):541-549.
[10]Bellmann M,Schmalz T,Blumentritt S.Comparative biomechanicalanalysis of currentmicroprocessor-controlled prosthetic knee joints[J].Arch Phys Med Rehabil,2010,91(4): 644-652.
[11]Thiele J,Westebbe B,Bellmann M,etal.Designs and performance of microprocessor-controlled knee joints[J].Biomed Tech,2014,59(1):65-77.
[12]Argunsah Bayram H.Biomechanics of prosthetic knee systems:Role of dampening and energy storage systems[D]. Cleveland:Cleveland State University,2013.
[13]金德聞,王人成,白彩勤,等.電流變液智能下肢假肢擺動相控制原理與方法[J].清華大學學報:自然科學版,1998,38(2): 40-43.
[14]王人成.我國假肢技術的研究與進展[J].中國康復醫學雜志,2012,17(11):1058-1060.
[15]張瑞紅,金德聞.六連桿假肢膝關節優化設計[J].中國康復醫學雜志,1999,14(4):162-165.
[16]喻洪流,錢省三.基于小腦模型神經網絡控制的步速跟隨智能膝上假肢[J].中國組織工程研究與臨床康復,2007,11(31):6233-6235.
[17]劉國聯,譚冠政,何燕.CIP-I智能人工腿步速控制系統硬件設計[J].南通職業大學學報,2008,22(2):62-66.
[18]叢德宏,徐心和.磁流變液智能假腿的擺動相控制[J].系統仿真學報,2006,18(S2):916-918.
[19]張曉玉.我國智能輔助器具科技創新的現狀與發展[J].中國康復理論與實踐,2013,19(5):401-403.
[20]王振平,喻洪流,杜妍辰,等.假肢智能膝關節的研究現狀和發展趨勢[J].生物醫學工程學進展,2015,36(3):159-163.
[21]馬紹興,王人成,沈強,等.假肢動力膝關節的研究進展[C].北京:第六屆北京國際康復論壇,2011:259-264.
[22]Sup F,Varol HA,Mitchell J,et al.Self-contained powered knee and ankle prosthesis:Initial evaluation on a transfemoral Amputee[C].IEEE IntConf RehabilRobot,2009:638-644.
[23]Sup F,VarolHA,Mitchell J,etal.Design and controlof an active electrical knee and ankle prosthesis[C].Proc IEEE RAS EMBS IntConf Biomed RobotBiomechatron,2008:523-528.
[24]Borjian R,Lim J,Khamesee MB,etal.The design of an intelligentmechanical active prosthetic knee[C].Conference of the IEEE Industrial Electronics Society,IEEE,2008:3016-3021.
[25]KaptiAO,YucenurMS.Design and controlof an active artificial knee joint[J].Mech Mach Theory,2006,41(12): 1477-1485.
[26]Martinez-Villalpando EC,Mooney L,ElliottG,etal.Antagonistic active knee prosthesis.Ametabolic costofwalking comparison with a variable-damping prosthetic knee[C].ConfProc IEEEEng Med BiolSoc,2011:8519-8522.
[27]Fu A,Fu C,Wang K,etal.The key parameter selection in design of an active electrical transfemoral prosthesis[C].IEEE ROBIO,2013:1716-1721.
[28]Geng YL,Yang P,Xu XY,etal.Design and simulation of active transfemoral prosthesis[C].Control and Decision Conference,2012:3724-3728.
[29]PillaiMV,Kazerooni H,Hurwich A.Design of a semi-active knee-ankle prosthesis[C].IEEE Int Conf Robot Autom,2011: 5293-5300.
[30]Lambrecht BGA,Kazerooni H.Design of a semi-active knee prosthesis[C].IEEE IntConf RobotAutom,2009:639-645.
[31]Sup F,Bohara A,Goldfarb M.Design and control of a powered knee and ankle prosthesis[C].IEEE Int Conf Robot Autom,2007:4134-4139.
[32]Herr H.User-adaptive control of amagnetorheological prosthetic knee[J].Ind Rob,2003,30(1):42-55.
[33]Torrealba RR,Zambrano LA,Andara E,et al.Medium-cost electronic prosthetic knee for transfemoral amputees:A medicalsolution for developing countries[J].IFMBEProc,2009,25(9):456-459.
[34]Seymour R,Engbretson B,Kott K,etal.Comparison between the C-leg microprocessor-controlled prosthetic knee and non-microprocessor control prosthetic knees:a preliminary study of energy expenditure,obstacle course performance,and quality of life survey[J].Prosthet Orthot Int,2007,31(1): 51-61.
[35]Kahle JT,Highsmith MJ,Hubbard SL.Comparison of nonmicroprocessor kneemechanism versusC-Leg on Prosthesis Evaluation Questionnaire,stumbles,falls,walking tests,stair descent,and knee preference[J].JRehabil Res Dev,2008,45(1): 1-13.
[36]Schaarschmidt M,Lipfert SW,Meier-Gratz C,etal.Functional gaitasymmetry of unilateral transfemoralamputees[J].Hum Mov Sci,2012,31(4):907-917.
[37]Kaufman KR,Frittoli S,Frigo CA.Gait asymmetry of transfemoral amputees using mechanical and microprocessor-controlled prosthetic knees[J].Clin Biomech(Bristol,Avon),2012,27(5):460-465.
[38]Segal AD,Orendurff MS,Klute GK,et al.Kinematic and kinetic comparisons of transfemoral amputee gait using C-Leg and Mauch SNS prosthetic knees[J].JRehabil Res Dev,2006,43(7):857-870.
[39]吳成東,金基準,聞時光,等.基于混合驅動仿生膝關節機構設計[J].沈陽建筑大學學報(自然科學版),2012,28(4): 759-764.
[40]吳波.基于磁流變阻尼器的動力型智能假肢動力特性分析[D].哈爾濱:哈爾濱工業大學,2015.
[41]UnalR,Behrens SM,CarloniR,etal.Prototype design and realization of an innovative energy efficient transfemoral prosthesis[C].Proc IEEERASEMBS IntConf Biomed RobotBiomechatron,2010,584(1):191-196.
[42]Unal R,CarloniR,Behrens SM,etal.Towards a fully passive transfemoral prosthesis for normal walking[C].Proc IEEE RAS EMBS Int Conf Biomed Robot Biomechatron,2012,49(4):1949-1954.
[43]Sophyn S,Koganezawa K.Above knee prosthesis for ascending/descending stairswith no externalenergy source[C].Assistive Robotics,2015(8):35-42.
[44]王錕.智能假肢膝踝協調控制與應用[D].天津:河北工業大學,2013.
[45]柏健.智能假肢膝踝協調控制系統的研究和設計[D].天津:河北工業大學,2013.
[46]A rnoutM,Pierre C,Michael VD,etal.Conceptand design of the HEKTA(Harvest Energy from the Knee and Transfer it to the Ankle)transfemoral prosthesis[C].Proc IEEERASEMBS IntConf Biomed RobotBiomechatron,2012:550-555.
[47]Andrysek J,Liang T,Steinnagel B.Evaluation of a prosthetic swing-phase controller with electrical power generation[J]. IEEETransNeuralSystRehabilEng,2009,17(4):390-396.
[48]Rarick R,Richter H,van den Bogert A,et al.Optimal design of a transfemoral prosthesis with energy storage and regeneration[C].American Control Conference(ACC),2014.IEEE,2014:4108-4113.
[49]Grimmer M,Eslamy M,Seyfarth A,etal.Energetic and peak poweradvantagesof serieselastic actuators in an actuated prosthetic leg for walking and running[J].Actuators,2014,3(1): 1-19.
[50]Rouse EJ,Mooney LM,HerrHM.Clutchable series-elastic actuator:Implications for prosthetic knee design[J].Int JRob Res,2014,33(13):1611-1625.
State-of-the-artand Developmentof Intelligent Knee Prosthesis(review)
GU Hong,LIWei-da,LIJuan
SchoolofMechanicaland Electric Engineering,Soochow University,Suzhou,Jiangsu 215000,China
LIWei-da.E-mail:hit_liweida@163.com
Intelligentprosthesis isgoing to be a research focus recently with the incrementof the transfemoralamputeesand the development ofmicroelectronic technology,control technology and so on.As the fundamental part of the lower extremity prosthetics,the knee prostheseswith high performance is still hard to design.This paper reviewed the developmentof the intelligent knee prostheses,classified the currentavailable prostheses in the term of construction design,and discussed the drawback of their design and the trend of the further development.
intelligentprosthesis;knee prosthesis;design;review
10.3969/j.issn.1006-9771.2016.09.021
R496
A
1006-9771(2016)09-1080-06
2016-03-01
2016-04-19)
1.國家“863計劃”資助項目(No.2015AA 042303;No.2015AA041002);2.國家自然科學基金項目(No.51475314)。
蘇州大學機電工程學院,江蘇蘇州市215000。作者簡介:顧洪(1991-),男,漢族,江蘇蘇州市人,碩士研究生,主要研究方向:康復機器人。通訊作者:李偉達(1979-),男,漢族,河北泊頭市人,博士,副教授,主要研究方向:康復機器人。E-mail:hit_liweida@163.com。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
