高亞聲速靶彈拖曳式誘餌系統的拖纜姿態分析
2016-10-17 01:20:46榮念通丁軍輝滕克難
航天電子對抗 2016年4期
關鍵詞:質量
榮念通,丁軍輝,滕克難
(1.中國人民解放軍91851部隊,遼寧 葫蘆島 125000;2.海軍航空工程學院,山東 煙臺 264001)
?
高亞聲速靶彈拖曳式誘餌系統的拖纜姿態分析
榮念通1,2,丁軍輝1,滕克難2
(1.中國人民解放軍91851部隊,遼寧 葫蘆島 125000;2.海軍航空工程學院,山東 煙臺 264001)
拖纜姿態分析是高亞聲速靶彈拖曳誘餌系統結構及布局設計的基礎。針對常見的誘餌氣動外形,利用旋成體空氣動力學理論,分析估算高亞聲速環境下拖曳誘餌的氣動阻力。采用離散化方法,將柔軟拖纜視為由多段剛體連接而成的鏈狀結構,利用力矩平衡原理,由誘餌端起計算纜繩每一離散剛體段的姿態,并逐次向載彈拖纜定位點遞推,最終近似計算出整條拖纜姿態。
拖曳式誘餌;拖纜;姿態計算
0 引言
拖曳式誘餌隨載體一起運動,有針對性地實施主動紅外輻射、電磁輻射或進行轉發干擾,在防空導彈的導引系統視場內形成一個紅外或電磁特性更強的假目標,與載體一起形成兩點源欺騙干擾,迷惑防空導彈系統的搜索或跟蹤過程[1]。拖曳式誘餌與飛機配合使用可有效提高載機的戰斗存活率,由對艦或對地導彈拖帶使用,亦可有效提高導彈武器的突防概率[2]。
本文具體研究“高亞聲速靶彈+柔性拖纜+小質量干擾誘餌”構成的彈載拖曳干擾系統。工程上,確定拖纜在高速氣流中的姿態是研究拖曳系統設備布局、釋放策略、靶彈的飛行安全、拖曳系統工作可行性、拖攬防護等后續關鍵問題的前提。由于拖纜柔軟姿態時變,拖纜姿態分析是拖曳系統分析設計的難點之一。
1 拖曳體氣動力估算
拖曳體通常用于裝載干擾源、干擾天線、供電電池等設備,拖曳體呈流線型結構,尾部通常安裝用于姿態穩定的“×”形固定式穩定尾翼,整體外形尺寸較小,本身無動力,由拖纜牽引飛行,無主升力翼,自身不提供推力及氣動升力,下面僅分析其氣動阻力問題,圖1為拖曳體外形示意圖。

圖1 拖曳體外形示意圖
拖帶過程中,拖曳體的纜繩掛點位于殼體前端上方,以掛點為力矩參考點,拖曳體本身呈軸對稱結構,航向力矩自然平衡,長度短、質量小的特點使其重力力矩亦較小,高速氣流中穩定尾翼產生的低頭力矩很容易與之平衡,故可認為拖曳體的攻角近似為零,在下文的氣動阻力分析中,按照零度攻角、忽略穩定尾翼氣動阻力的前提進行處理。
拖曳體機身通常由圓滑的頭部、圓柱形中部和收縮的尾部三部分構成,其中頭部長細比、尾部收縮比、機身粗糙度等是影響空氣阻力的關鍵因素,長細比越大,機體空氣阻力越小。根據文獻[3] 中高亞聲速條件下,無圓柱形中段形狀和長細比不同的旋成體(1~8)空氣阻力系數的比較,可得出,形狀8(長細比:1)在速度Ma數為0.85時的阻力系數約為0.3(參考面積:機身最大圓截面)。
對零攻角下鈍頭圓柱體及各分量阻力系數隨速度Ma數的變化分析,以及錐形頭部旋成體的阻力系數及各分量隨速度Ma數的變化分析中[3],分別給出了帶圓柱形身段的鈍性頭部和圓錐形頭部(長細比:2.5)的旋成體空氣阻力系數及各分量隨速度Ma數變化的情況,可看出:
1)在全部速度Ma數范圍內,旋成體的摩擦阻力系數分量占比極小,絕對值在0.01量級。
2)由于沒有收縮形尾段,底部阻力系數在整個阻力系數中占比較大。
3)長細比為2.5、速度Ma數為0.85的條件下,圓錐形頭部旋成體的阻力系數約為0.2。
拖曳體頭部長細比取1~2之間,尾部適當收縮,根據文獻[3]的實測曲線,以最大截面積為參考面積的拖曳體空氣阻力系數應該在0.2~0.3之間,拖曳體直徑按照12.5cm設計,據此估算拖曳體的空氣阻力保持在55~83N范圍內。
2 拖纜姿態分析
參照文獻[4]中拖曳式誘餌運動特性建模與仿真計算方法,靶彈直線平飛狀態下,拖曳體釋放后,彈體、纜繩、拖曳體會在高速氣流中保持相對穩定姿態,該姿態由纜繩柔韌度、纜繩質量分布特性、纜繩氣動力特性、拖曳體質量、拖曳體氣動外形、相對氣流速度等因素共同決定。常規拖曳體呈軸對稱結構,在平穩迎面氣流中能始終保持左右側向力及力矩對稱平衡,細長圓柱形纜繩亦是軸對稱結構,左右受力對稱平衡,故直線平飛拖帶過程中,纜繩相對于垂直重力面的偏角(圖2角度B)保持在0°附近,下面詳細分析計算纜繩相對于水平面的仰角姿態 (圖2角度A)。

圖2 拖纜與彈體相對姿態
首先基于離散思想,參照文獻[5]中拖纜的彈簧柔性體模型,將柔軟拖纜視為由多段剛體順序連接而成的鏈狀結構,剛體不可壓縮和拉伸,任一剛體段在鉛垂平面內僅受空氣動力和重力作用,剛體段之間無摩擦阻力,剛體段在水平面內亦無左右擺動。然后利用力矩平衡原則,由拖曳誘餌端起算每一段虛擬剛性纜繩的姿態,依次向靶彈端推算,最終可近似確定出整條拖纜姿態。拖纜的簡化示意圖如圖3所示,圖中H為拖曳體與飛行器水平面之間的垂直距離。

圖3 穩定拖帶姿態簡化纜繩示意圖
欲分析角度A,必須首先明確纜繩的受力和拖曳體的受力情況。設拖曳體重力為MT,氣動阻力大小為FT,方向與氣流方向相同,升力為0;纜繩總長為L,平均直徑為Φ,質量規格為M(N/m),虛擬纜繩段空氣阻力按照圓柱繞流模型處理,阻力系數CD引用文獻[6]中圓柱阻力系數與Reynolds數關系,阻力方向與纜繩處處垂直,在水平方向和纜繩軸線方向上有分量存在。
剛體質量為G,第i段剛體氣動力與該段法線方向相同,大小為Fi-1,沿第i段剛體軸線方向作用于第i+1段剛體的作用力為Fi-1。
基于文獻[7]中的單元力學模型,纜繩穩態條件下,認為連接環為相對固定點,第一段纜繩滿足以下力矩平衡方程:
(G+2GT)sinA0=2FTcosA0+F0
(1)
第二段纜繩滿足:
(2)
第三段至第N段滿足:

(3)
式中,
G=LM/N
(4)

(5)
3 仿真分析結果
參數設定為拖曳體質量分為1kg、5kg、10kg三個規格,空氣阻力分別估計為30N、80N,纜繩特性為:總長50m,阻力系數1.2,分段數250,質量規格為0.024kg/m,直徑為2mm。利用式(1)~(5)計算出的纜繩姿態如圖4~9所示。
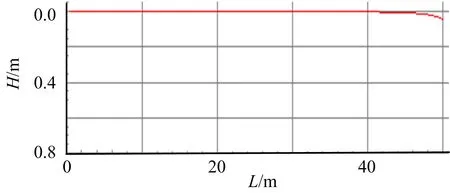
圖4 拖曳體阻力30N、質量1kg時纜繩姿態
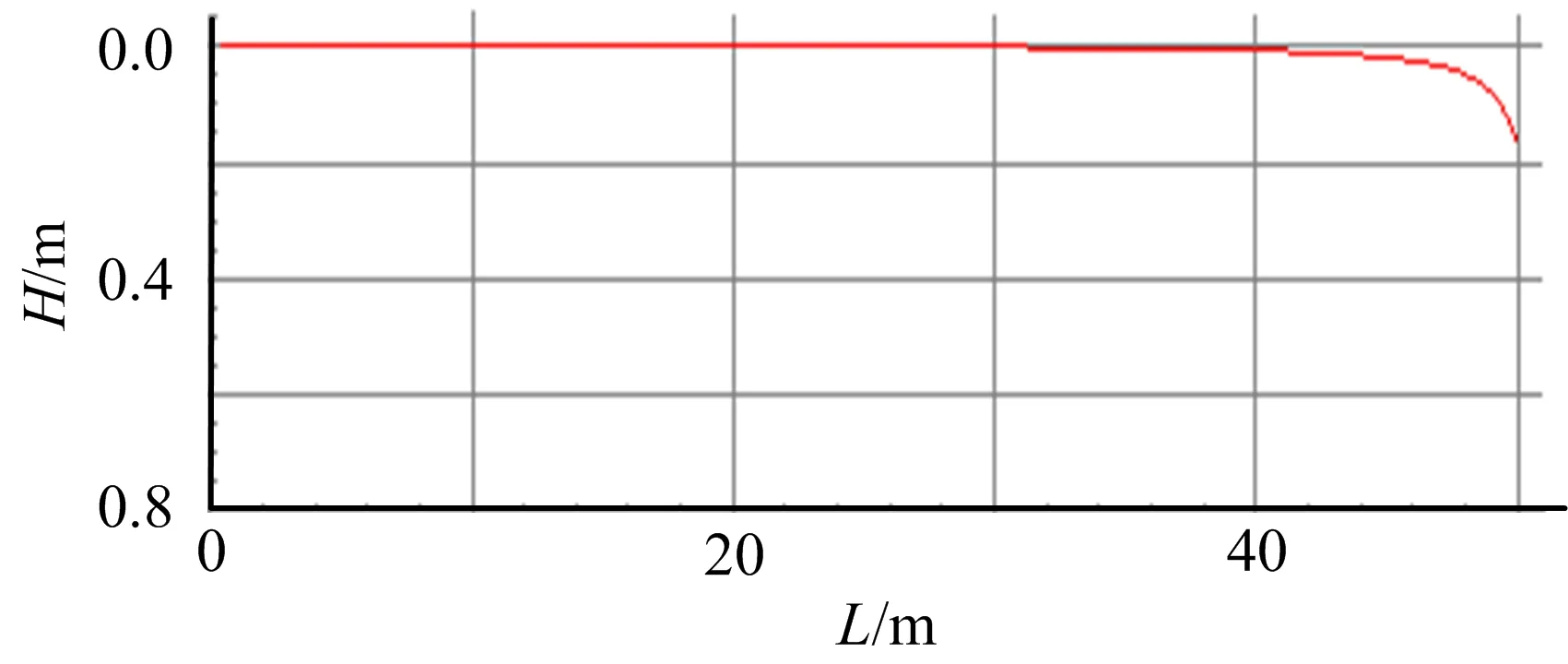
圖5 拖曳體阻力30N、質量5kg時纜繩姿態

圖6 拖曳體阻力30N、質量10kg時纜繩姿態

圖7 拖曳體阻力80N、質量1kg時纜繩姿態

圖8 拖曳體阻力80N、質量5kg時纜繩姿態

圖9 拖曳體阻力80N、質量10kg時纜繩姿態
4 結束語
本文基于離散思想和力矩平衡方法構建了拖纜的姿態分析計算模型,并給出典型狀態下的姿態計算結果,由仿真分析結果可看出,在高亞聲速條件下,近靶彈端拖纜很長一段距離與氣流平直,在拖曳誘餌端,誘餌質量越大,纜繩彎曲越多,誘餌下降越大。鑒于上述結論,在進行拖曳誘餌系統布設設計時,拖纜的釋放點(纜車伸出點)應盡量選擇在靶彈尾部或釋放點后方為凈空的區域,以避免平直的拖纜與彈體發生刮蹭、纏繞等影響飛行安全的問題發生。■
[1]李新虎,王晟達,甘軼,等. 一種預警機拖曳式雙誘餌方案誘騙反輻射導彈效能分析[J]. 彈箭與制導學報,2011,31(8): 57-61.
[2]陳義,崔艷鵬,鐘昭. 有源拖曳式誘餌的干擾樣式及對抗措施探討[J].航天電子對抗,2011,27(5):10-12, 60.
[3]克拉斯諾夫HO.旋成體空氣動力學[M].北京:科學出版社,1965.
[4]蘆艷龍,童中翔,于錦祿,等.拖曳式誘餌運動特性建模與仿真計算[J].飛行力學,2010,28(5):24-26.
[5]張登成,唐碩.拖纜的彈簧柔性體模型在拖曳式空中發射系統中的應用研究[J].導彈與航天運載技術,2005,277(4):43-46.
[6]Schlichting H. Boundary layer theory[M]. New York : McGraw-Hill,1960.
[7]胡曉楠,張建斌,趙國偉. 柔性繩索在空氣阻力作用下的動力學仿真研究[J]. 機械科學與技術, 2010, 29(10):1334-1337.
Attitude analysis of towline tied with towed decoy in high subsonic flying
Rong Niantong1,2, Ding Junhui1, Teng Kenan2
(1.Unit 91851 of PLA,Huludao 125000,Liaoning,China;2.Naval Aeronautical Engineering Institute,Yantai 264001,Shandong,China)
Attitude analysis of towline is the base of whole construction and layout design of towed decoy systems. For the usual aerodynamic configuration scheme of given decoy, the aerodynamic resistance of decoy in high subsonic flying is analyzed and calculated using the method of spinning projectile aerodynamics. Using the discrete method of continuous system, the soft towline is regarded as the rigid body chains which joined one by one. Based on the moment-equilibrium theory, the attitude of the rigid body chain is calculated firstly at the side of the decoy. And then recurrence is made to the next, until the location point of the towline in missile. Finally the whole attitude of the towline is concluded approximatively.
towed decoy; towline; attitude calculation
2016-06-15;2016-07-11修回。
榮念通(1988-),男,助理工程師,碩士研究生,主要研究方向為導彈武器系統試驗及飛行器系統設計與研究。
TN97
A
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54