基于延時對準船用捷聯慣導舒勒振蕩抑制方法
2016-10-18 02:21:28李久順程建華王秋帆
系統工程與電子技術 2016年10期
關鍵詞:系統
趙 琳, 李久順, 程建華, 賈 春, 王秋帆
(1. 哈爾濱工程大學自動化學院, 黑龍江 哈爾濱 150001;2. 北京自動化控制設備研究所, 北京 100074)
?
基于延時對準船用捷聯慣導舒勒振蕩抑制方法
趙琳1, 李久順1, 程建華1, 賈春1, 王秋帆2
(1. 哈爾濱工程大學自動化學院, 黑龍江 哈爾濱 150001;2. 北京自動化控制設備研究所, 北京 100074)
針對捷聯慣性導航系統精度受振蕩誤差影響的問題,提出了一種舒勒振蕩誤差抑制方法。基于捷聯慣導系統可并行執行多套導航算法的特點,通過延長初始對準時間,使得導航算法2相對于導航算法1延遲半個舒勒振蕩誤差周期執行。延時對準使得算法2中舒勒振蕩誤差相位與算法1相差一個圓周率。取算法1和算法2相應導航輸出結果的均值補償舒勒振蕩誤差,達到了提高捷聯慣導系統精度的目的。經過仿真和實驗驗證,該方法對船用捷聯慣性導航系統的舒勒振蕩誤差具有良好的抑制效果。
捷聯慣性導航系統; 舒勒振蕩誤差; 延時對準; 誤差補償
0 引 言
捷聯慣性導航系統憑借自主性,輸出導航信息的連續性和全面性,使其在軍事和眾多民用導航領域發揮著不可替代的作用,并成為了實現載體導航的核心導航系統[1-4]。
慣性導航系統(以下簡稱慣導系統)在工作過程中,除隨時間累積的誤差外,初始對準誤差、慣性器件誤差的存在,激勵慣導系統產生舒勒、傅科和地球周期振蕩誤差,這些振蕩誤差的存在,大幅降低了慣導系統輸出信息的精度[5-6]。例如,舒勒和傅科振蕩大大降低了慣導系統水平姿態和水平速度精度,這對于需要連續長時間提供高精度導航定位信息的艦船導航系統,是非常不利的。
阻尼和組合技術是抑制舒勒周期振蕩誤差的有效技術。阻尼技術可以有效地阻尼捷聯慣導系統的舒勒周期振蕩誤差。但當載體處于機動運動狀態時,阻尼慣導系統會因為載體的機動運動而產生動態誤差,反而降低了慣導系統的動態導航精度[7-8]。傳統的基于卡爾曼濾波的阻尼慣導系統的實現方法,只適用于小加速度運動的載體,依然不能滿足載體高機動性導航需求。組合導航系統融合慣導系統和其他導航系統的信息,多種信息源互相補充,構成一種有多余度和導航準確度更高的多功能系統[9-12]。雖然組合導航雖然能夠提高慣導系統精度,但由于借助了外部信息,使得慣導系統的自主性遭到破壞[13-14]。因此,設計不改變慣導系統自主性,且能適合機動運動狀態的舒勒振蕩誤差抑制方法,對于提高慣導系統精度,具有重要的實際意義。
基于對慣導系統誤差和誤差傳播機理的分析,本文提出了一種基于延時對準的捷聯慣導舒勒振蕩誤差的抑制方法,能在保持慣導系統自主性的前提下,實現靜態和運動狀態下的舒勒振蕩誤差抑制。
1 捷聯慣導周期性振蕩誤差分析
受到自身運動特性的影響,無阻尼狀態下的慣導系統,其動靜態誤差特性差別較小。因此可基于忽略垂向通道的捷聯慣導靜基座誤差方程開展分析[15],即

(1)


對式(1)進行拉氏變換,可以求得捷聯慣導系統的誤差與誤差源間的傳遞函數關系為
(2)
對于捷聯慣性導航系統來說,常值陀螺漂移和加速度計零偏是激勵捷聯慣導系統最重要的誤差源,因此假定
(3)
將式(3)所示的誤差源代入式(2),可以解得系統誤差。以北向速度誤差為例,其表達式為
(4)
式中
式中,ωs為舒勒振蕩頻率;ωie為地球振蕩頻率(即地球自轉角速率)。
對式(4)進行拉氏反變換,并考慮到ωs?ωie,可得
(5)
式中
通過式(5)可知,雖然北向速度誤差穩態值為零,但速度誤差中包含有明顯的舒勒和地球周期振蕩誤差。即從數學角度看,北向速度誤差δvN(t)是由頻率為ωs以及頻率為ωie的正余弦函數疊加而成的,而周期函數的幅值則是由相應誤差源所決定。而由式(2)可知,東向速度誤差、緯度誤差和姿態誤差與北向速度誤差類似,具有相同的特征根,即具有類似的周期振蕩誤差,這些振蕩誤差的存在,大大降低了慣導系統的導航精度。上述結果是在忽略傅科周期振蕩誤差的條件下給出的,由于傅科周期性振蕩誤差只對舒勒周期性振蕩誤差具有調制作用,忽略其影響對結論分析影響不大。
2 基于延時對準的舒勒振蕩誤差補償
2.1基于延時對準的舒勒振蕩誤差補償原理
捷聯慣導系統的周期為T舒勒振蕩誤差可簡化表述為
(6)
式中,A為舒勒振蕩誤差幅值,ωs=2π/T。
另一個延時T/2的舒勒振蕩誤差為
(7)
將信號x1(t)和x2(t)合成,可得其平均輸出為
(8)
通過式(8)所示的計算結果可知,取舒勒振蕩誤差信號與延時T/2的舒勒振蕩誤差信號的均值,可以消除舒勒振蕩誤差。
所有慣導系統轉入導航狀態前,必須首先完成初始對準。對于靜基座初始對準條件下的捷聯慣性導航系統來說,對準過程中姿態不變,可以通過對慣性器件測量數據的處理來獲取延時啟動慣導系統的效果[16]。然而,船用捷聯慣導系統一般是在晃動基座條件下完成初始對準,其姿態時刻都發生著小幅變化。無論采用自主式對準,還是基于外部信息輔助的組合式對準,船用慣導系統的慣性器件誤差直接決定了慣導系統的初始對準精度。使用卡爾曼濾波技術進行初始對準時,對準結果會隨著時間的增加而不斷地進行收斂,最終收斂于某一固定值,隨后,初始對準誤差將不再隨時間發生改變。所以,可以利用初始對準誤差的延時不變性,抑制船用捷聯慣導系統的舒勒振蕩誤差。
不同于平臺慣導系統的物理閉環控制,捷聯式慣導系統在采集陀螺儀和加速度計的測量信息后,可設計多套算法并行解算。為了抑制船用捷聯慣導系統中的舒勒振蕩誤差,需要同時執行兩套獨立的捷聯慣導解算算法。圖1給出了基于延時對準的舒勒振蕩誤差補償原理示意圖。

圖1 基于延時對準的舒勒振蕩誤差抑制原理示意圖Fig.1 Schematic diagram of Schuler oscillation restriction based on delayed alignment
在圖1中,算法1在0~t1時段內進行初始對準,t1時刻完成初始對準后轉入導航狀態;算法2在t1時刻的基礎上,繼續延時T/2時間,在t2=t1+T/2時刻完成初始對準轉入導航狀態。延長初始對準時間使得算法2中舒勒振蕩誤差的相位與算法1相差π,在t2時刻后,取算法1和算法2輸出導航結果的均值,即可補償舒勒振蕩誤差。
2.2基于延時對準的舒勒振蕩誤差補償原理分析
基于圖1所示的延時對準方式,重新對式(5)進行分析,并將其寫成
(9)
式中
對于圖1所示的延時對準,當滿足T=2π/ωs時,對算法1和算法2的系統誤差進行求平均運算可得
根據三角函數關系,并考慮到ωs?ωie,對速度誤差平均值化簡可得
(10)
由式(10)可知,周期T滿足T=2π/ωs,可以直接消除慣導系統的舒勒周期振蕩。
分析問題時,雖然忽略了傅科振蕩的影響,但是,在慣導系統振蕩誤差中,舒勒振蕩與傅科振蕩相調制,受調制的振蕩誤差z可簡化表述為
z=Acosωftsinωst
(11)
式中,ωf為傅科振蕩頻率。
由式(11)可知,Asinωst為傅科振蕩的幅值,因此,當舒勒振蕩誤差被補償后,傅科周期振蕩也將被抑制。
由于船用慣導系統一般在晃動基座條件下進行系統初始化,其啟動準備時間比靜基座條件下的慣導系統長很多,通常為幾個小時。因此,在實際應用中,犧牲42.2min的初始對準時間來獲得舒勒振蕩誤差的抑制效果是行之有效的。
理論上,取T為地球振蕩周期,可以抑制捷聯慣性導航系統中的地球周期性振蕩誤差。但是,在實際應用中,犧牲12h的初始對準時間來抑制地球周期振蕩誤差的意義并不大。
設算法1輸出的導航參數為Ci(二維速度、二維位置和三維姿態),算法2延時π/ωs對準,輸出導航參數為Di,用Di來補償Ci中的舒勒振蕩誤差,補償公式為
(12)
由式(12)可知,基于延時對準的舒勒振蕩誤差抑制方法,無需引入外部基準信息,即沒有改變慣導系統自主性;由于慣導系統仍工作在無阻尼狀態,因此不會產生受載體機動而激勵的動態誤差。
值得指出的是,雖然只針對靜基座的情況進行了分析,但是該方法同樣適用于運動狀態的載體。由于慣性導航系統的動態誤差方程過于復雜,很難給出慣性導航系統動態誤差的解析解。然而,對于船舶這類的低速運載體來說,其運動速度一般不超過20m/s,vE/R和vN/R至少比ωie小一個數量級,所以,在該條件下,慣性導航系統的動態誤差和靜態誤差間的差別不大,可以利用慣導系統的靜態誤差方程來簡要說明其動態特性[16]。
3 舒勒振蕩誤差補償仿真
慣性器件誤差:陀螺常值漂移:0.01°/h;加速度計常值漂移:1×10-4g。
初始值誤差:經度誤差為2.1″,緯度誤差為2.1″;東向速度誤差為0.12m/s,北向速度誤差為0.1m/s;縱搖角誤差為0.61′,橫滾角誤差為0.58′,航向角誤差為-6.9′。
其他條件:算法2延時對準42.2min,轉入導航狀態后,載體速度變化幅度為15m/s,各姿態角變化范圍在0~60°之間;仿真時長48h,仿真步長0.02s。東向速度及北向速度變化率如圖2所示。

圖2 東向速度及北向速度變化率Fig.2 Change rate of east velocity and north velocity
仿真過程中載體的東向速度及北向速度變化率始終按照如圖2所示規律變化,即載體始終處于連續機動運動狀態。很明顯,傳統的阻尼技術在不借助外部信息輔助的情況下無法應用于此運動條件。
基于上述仿真條件的仿真結果如圖3~圖5所示。
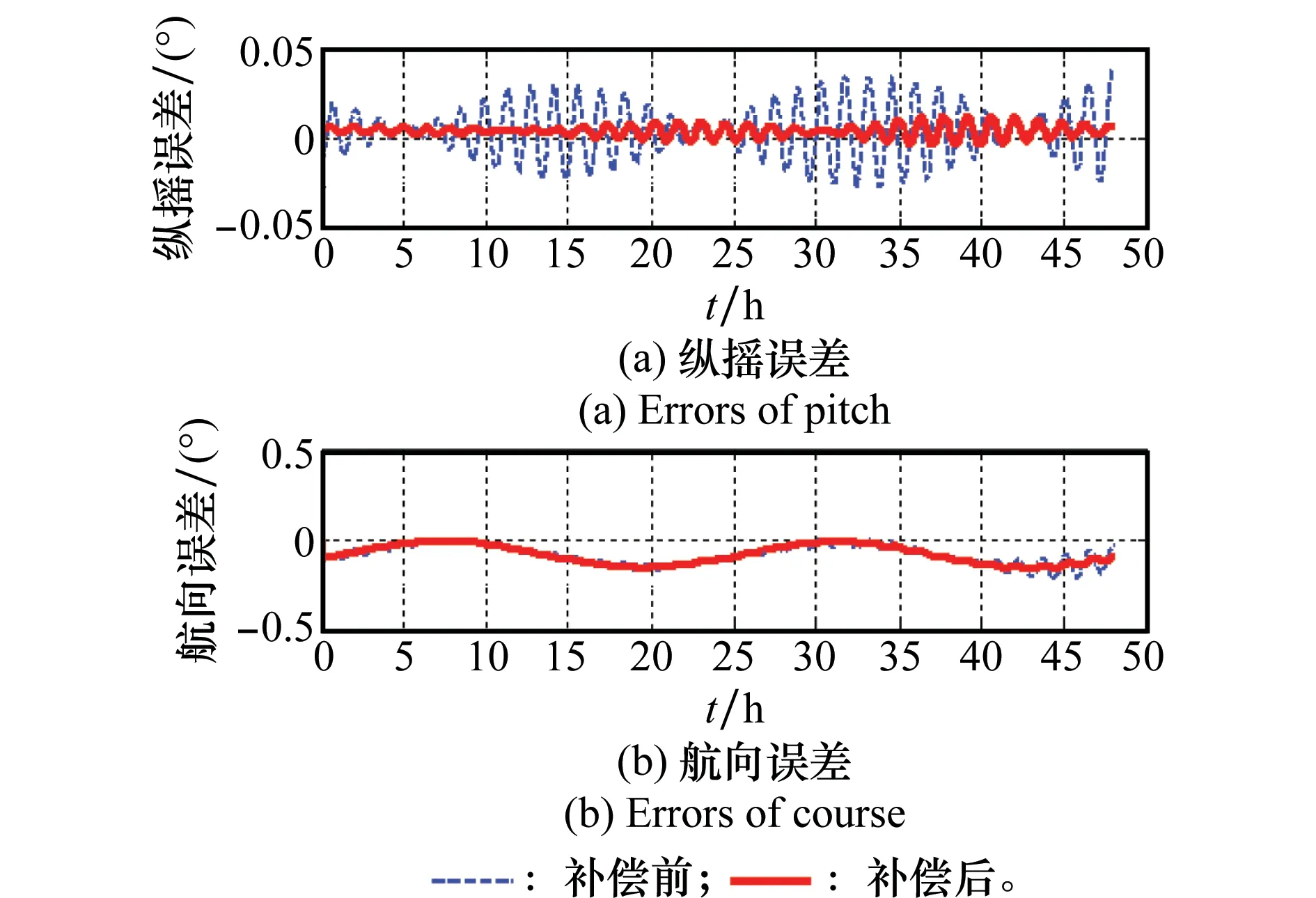
圖3 舒勒振蕩誤差補償的姿態誤差仿真結果Fig.3 Simulation results of attitude errors for Schuler oscillation restriction
由圖3~圖5的仿真結果可知,速度、姿態和位置誤差中包含的舒勒和傅科周期振蕩誤差基本得到了抑制,且抑制效果較為明顯。這說明,該方法不僅適用于靜止狀態下的載體,也適用于連續機動狀態下的載體。與傳統的阻尼技術相比,其優勢在于可以實現舒勒和傅科振蕩誤差連續抑制,而不受載體運動狀態的影響。但由于延時對準只考慮了對舒勒周期振蕩誤差的抑制,因此地球周期振蕩誤差仍存在。
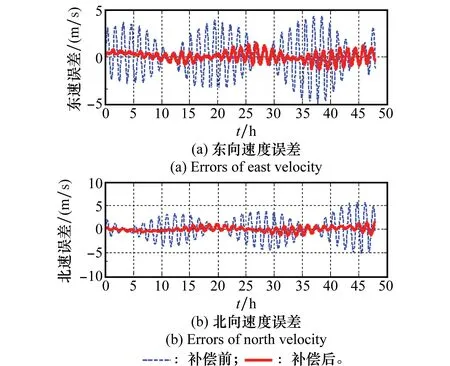
圖4 舒勒振蕩誤差補償的速度誤差仿真結果Fig.4 Simulation results of velocity errors for Schuler oscillation restriction
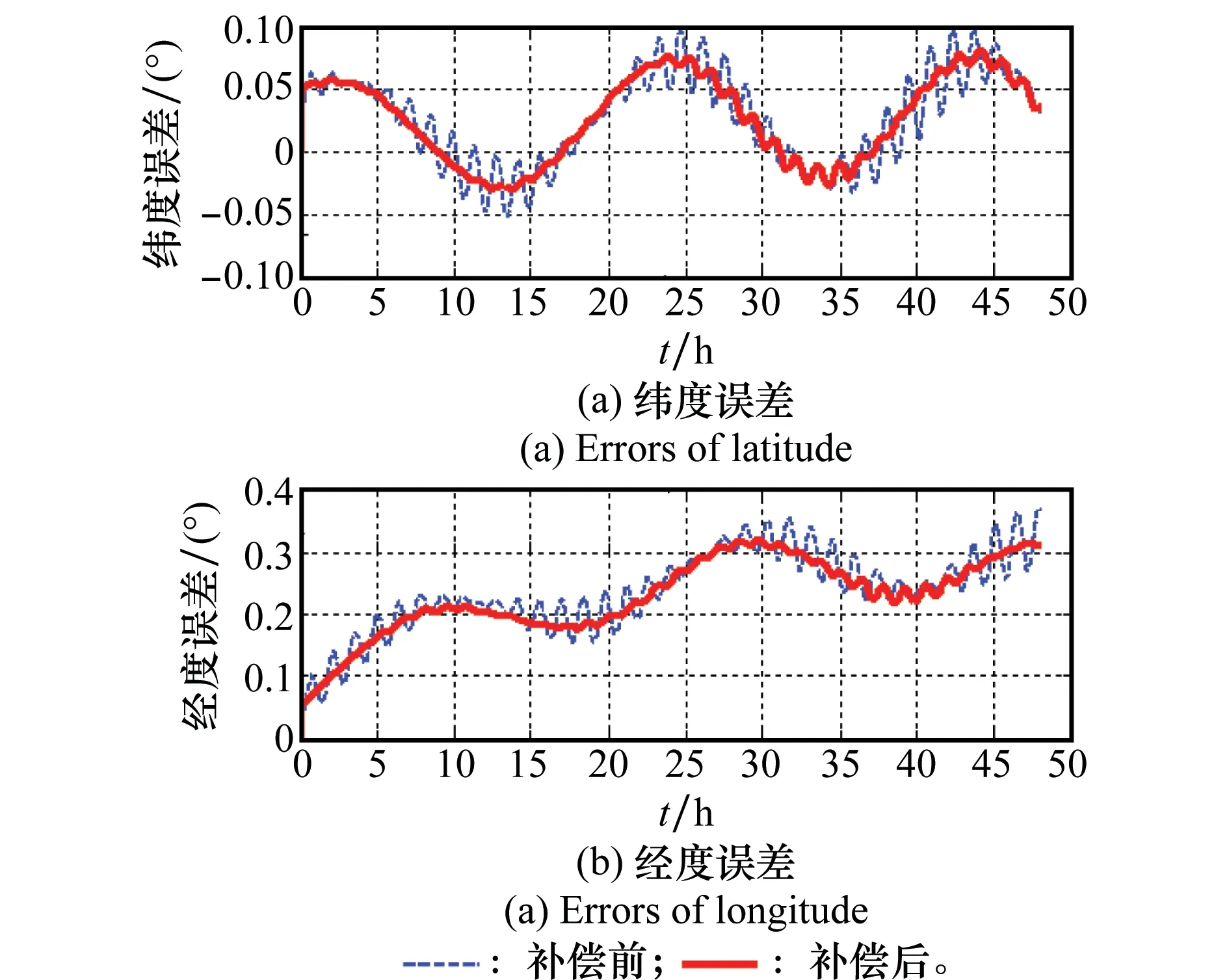
圖5 舒勒振蕩誤差補償的位置誤差仿真結果Fig.5 Simulation results of position errors for Schuler oscillation restriction
4 系統實驗
4.1實驗設備
如圖6所示,將慣性測量單元(inertialmeasurementunit,IMU)置于溫控箱體內,對外部的熱磁干擾進行隔離。圖6中左側為IMU溫控箱體,右側為IMU本體。
IMU主要性能指標如下:
陀螺:陀螺漂移小于0.005°/h;隨機游走0.005°/h;標度因數非線性度10ppm;標度因數不對稱度10ppm;標度因數重復性10ppm。
加速度計:加速度計零偏小于7×10-5g;速度隨機游走小于5×10-5g;標度因數1.3~1.6mA/g;非線性系數小于1μg/g2。
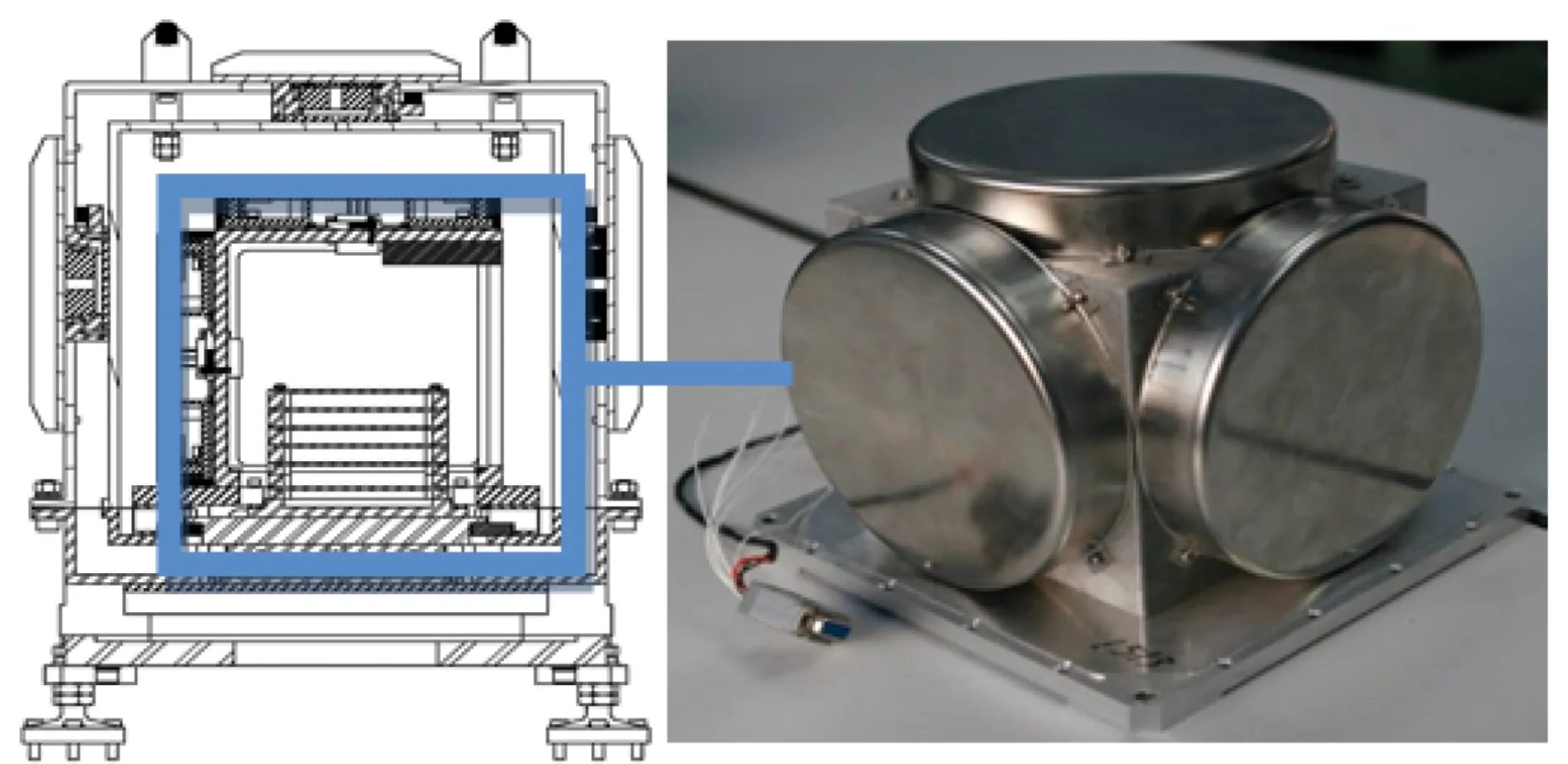
圖6 溫控箱體及IMUFig.6 Temperature control box and IMU
采用高精度三軸轉臺作為姿態基準。IMU擺放在搖擺中心,所以速度基本為零,位置不變。整個實驗設備如圖7所示。

圖7 實驗設備Fig.7 Test equipment
4.2實驗流程
為了使IMU與轉臺的姿態初始值相同,將IMU安裝至轉臺后,通過標定,將二者的基準統一。慣導系統啟動用時1h,溫控系統控制IMU穩定在33 ℃,目的是為了使陀螺儀和加速度計的輸出穩定。從系統啟動開始,轉臺開始擺動,進行初始對準。對準完成后,整個系統自動轉入導航狀態。轉臺擺動范圍5°,周期40s,系統工作24h。
4.3實驗結果
基于對實驗數據進行離線分析及處理,得到實驗結果如圖8和圖9所示。
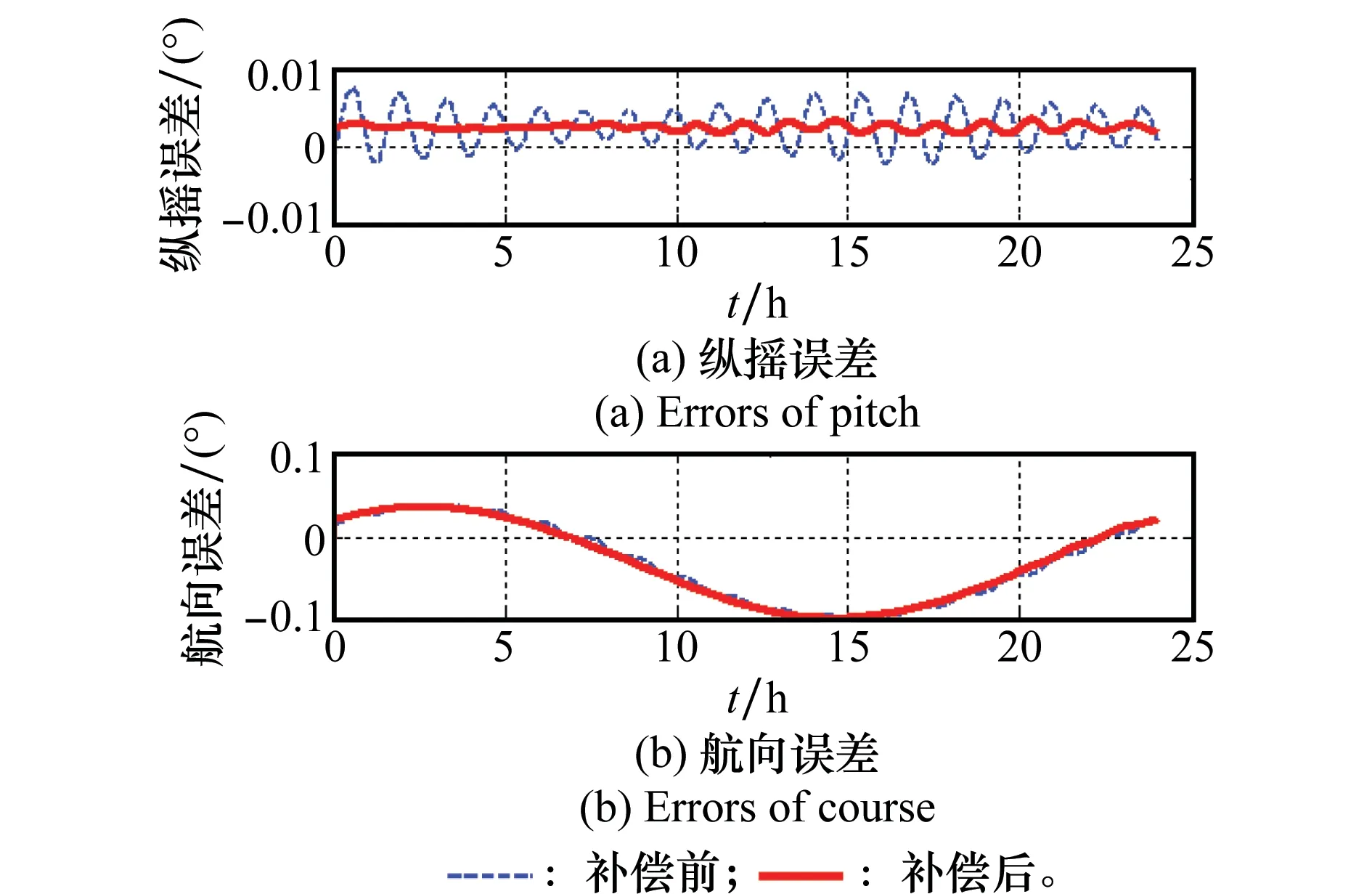
圖8 系統實驗的姿態誤差結果Fig.8 Results of attitude errors for system test
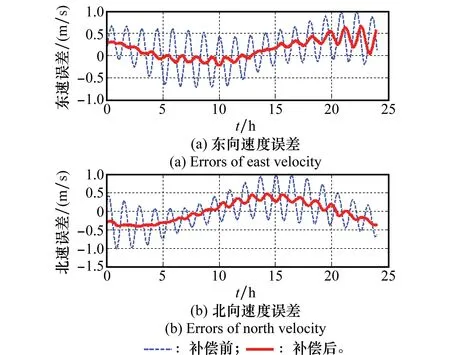
圖9 系統實驗的速度誤差結果Fig.9 Results of velocity errors for system test
從仿真和實驗結果可以看出,該方法可以有效抑制舒勒周期性振蕩誤差,但是并不能完全消除舒勒周期性振蕩誤差。舒勒周期性振蕩誤差受傅科周期性振蕩誤差的調制,而并沒有對傅科周期性振蕩誤差進行補償,所以,導致了舒勒周期性振蕩誤差補償不完全。
5 結 論
針對船用捷聯慣性導航系統精度受舒勒周期性振蕩誤差影響的問題,利用初始對準誤差的延時不變性,并結合船用捷聯慣導系統的實際應用條件,提出了一種基于延時初始對準的捷聯慣導系統舒勒振蕩誤差抑制方法。仿真和實驗結果表明,該方法對于抑制舒勒周期性振蕩誤差具有良好效果,周期性振蕩誤差幅值減小近一倍,可以有效提高捷聯慣導系統水平姿態和水平速度的測量精度。同時,由于傅科振蕩誤差與舒勒振蕩誤差相調制,所以,傅科振蕩誤差也得到了良好的抑制。該方法保留了慣導系統自主性、不會引入由加速度引起的動態誤差,適用于船舶這類的低速運載體,具有重要實際應用價值。
[1]GaoW,ZhangY,WangJ.Researchoninitialalignmentandself-calibrationofrotarystrapdowninertialnavigationsystems[J].Sensors, 2015, 15(2): 3154-3171.
[2]QinYY.Inertial navigation[M].Beijing:SciencePress,2006:112-124.(秦永元.慣性導航[M].北京:科學出版社,2006:112-124.)
[3]HaysKM,SchmidtRG,WilsonWA,etal.Asubmarinenavigatorforthe21stcentury[C]∥Proc. of the IEEE Position Location and Navigation Symposium, 2002:179-188.
[4]GaoW,YeP,ShiHW,etal.Polarmovingbasealignmentforstrapdowninertialnavigationsystem[J].Systems Engineering and Electronics, 2015,37(3): 627-632.(高偉,葉攀,石惠文,等. 捷聯慣導系統極區動基座對準[J].系統工程與電子技術, 2015, 37(3):627-632.)
[5]KongXY.INSalgorithmusingquaternonmodelforlowcostIMU[J].Robotics and Autonomous Systems,2004,46(4):221-24.
[6]WangZQ,FangJC,WangST,etal.TheoryandpracticeforeliminatingShuleroscillation[J].Journal of Chinese Inertial Technology, 2012, 20(4): 395-399.(汪湛清,房建成,汪順亭,等. 消除舒拉振蕩誤差的理論與實踐[J].中國慣性技術學報,2012,20(4):395-399.)
[7]GaoW,ZhangY.AnalyseofDampingnetworkeffectonSINS[C]∥Proc.of the International Conference on Mechatronics and Automation, 2009: 2530-2535.
[8]LiK,LiuF,XuY.Researchoninternaldampingalgorithmofmarineinertialnavigationsystem[J].Intelligent Computing and Information Science, 2011(135): 256-261.
[9]TangXQ,GuoGZ,GuoLB,etal.IntegratednavigationalgorithmsbasedonKalmanfilterwithstatefeedback[J].Journal of Chinese Inertial Technology, 2010, 18(2): 190-194. (湯霞清,郭官周,郭理彬,等. 基于狀態反饋的卡爾曼濾波組合導航算法[J].中國慣性技術學報,2010,18(2):190-194.)
[10]SunF,TangLJ.INS/GPSintegratednavigationfilteralgorithmbasedoncubatureKalmanfilter[J].Control and Desciion, 2012, 27(7): 1033-1036.(孫楓,唐李軍.基于cubatureKalmanfilter的INS/GPS組合導航濾波算法[J].控制與決策,2012,27(7):1033-1036.)
[11]MaY,FangJC,WangW,etal.DecoupledobservabilityanalysesoferrorstatesinINS/GPSintegration[J].Journal of Navigation, 2014, 67(3): 473-494.
[12]JaradatMAK,Abdel-HafezMF.Enhanced,delaydependent,intelligentfusionforINS/GPSnavigationsystem[J].IEEE Sensor Journal, 2014,14(5):1545-1554.
[13]MusaviN,KeighobadiJ.Adaptivefuzzyneuro-observerappliedtolowcostINS/GPS[J].Applied Soft Computing, 2015(29): 82-94.
[14]JwoDJ,YangCF,ChuangCH,etal.Anoveldesignfortheultra-tightlycoupledGPS/INSnavigationsystem[J].Journal of Navigation, 2012, 65(4): 717-747.
[15]HuangDM,ChengL. Inertial navigation system[M].Beijing:NationalDefenceIndustrialPress, 1986: 78-92. (黃德鳴,程祿. 慣性導航系統[M]. 北京:國防工業出版社,1986:78-92.)
[16]ZhaoL,LiJS,ChengJH,etal.AmethodforoscillationerrorsrestrictionofSINSbasedonforecastedtimeseries[J].Sensors, 2015, 15(7): 17433-17452.
李久順(1990-),通信作者,男,博士研究生,主要研究方向為慣性導航系統的振蕩誤差抑制及初始對準技術。
E-mail:lijiushun2015@163.com
程建華(1977-),男,副教授,博士,主要研究方向為慣性導航系統。
E-mail:ins_cheng@163.com
賈春(1991-),男,博士研究生,主要研究方向為組合導航技術。
E-mail:jiachuntzjz@163.com
王秋帆(1992-),女,碩士,主要研究方向為導航、制導與控制。
E-mail:wangqiufan083623@sina.com
Schuler oscillation restriction of shipborne SINSbasedondelayedalignment
ZHAO Lin1, LI Jiu-shun1, CHENG Jian-hua1, JIA Chun1, WANG Qiu-fan2
(1. College of Automation, Harbin Engineering University, Harbin 150001, China;2. Beijing Institute of Automatic Control Equipment, Beijing 100074, China)
Aimingattheprecisionofthestrapdowninertialnavigationsystem(SINS)isinfluencedbyoscillationerrors,amethodforSchuleroscillationerrorsrestrictionofshipborneSINSbasedondelayedalignmentisproposed.OwingtothecharacteristicsthattheSINScanexecutemultiplesetsofthenavigationalgorithmatthesametime,theexecutiontimeofthesecondalgorithmisrelativelyhalfoftheoscillationerrorperioddelayedtothefirstalgorithmthroughdelayedalignmentforhalfperiod.DelayingexecutionforhalfperiodmakesSchuleroscillationerrorsinthesecondalgorithmdifferentfromthefirstalgorithmbyacircumferenceratio.Themeanvalueofcorrespondingnavigationparametersfromthefirstalgorithmandthesecondalgorithmcontainsnooscillationerrors,whichimprovestheprecisionoftheSINSobviously.SimulationandtestresultsshowthatthemethodcanrestrictSchuleroscillationofshipborneSINSeffectively.
strapdowninertialnavigationsystem(SINS);Schuleroscillationerrors;delayedalignment;errorscompensation
2015-10-14;
2016-04-24;網絡優先出版日期:2016-06-02。
國家自然科學基金(61273081,61374007);中央高校基本科研業務費專項資金(HEUCFX41309)資助課題
U666.1
ADOI:10.3969/j.issn.1001-506X.2016.10.22
趙琳(1968-),男,教授,博士,主要研究方向為導航、制導與控制。
E-mail:zhaolin@hrbeu.edu.cn
網絡優先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160602.1527.006.html
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32