一種單脈沖雙通道自跟蹤系統快速校相方法
2016-10-21 05:31:39余海韓來輝
電子技術與軟件工程 2016年5期
余海 韓來輝

摘 要 本文闡述了單脈沖雙通道跟蹤體制的原理,通過數學分析,指出了采用該跟蹤體制的測控系統在跟蹤前進行校相的必要性。在分析常規校相方法的基礎上,給出了改進的快速校相方法及其應用的前提條件。經實際工程驗證,該方法切實有效。
【關鍵詞】單脈沖雙通道 交叉耦合 快速校相
1 引言
單脈沖雙通道跟蹤體制具有高精度、動態性能好的優點,航天測控系統大多采用這一跟蹤體制。但是由于受到天線電軸零點漂移,設備組合變化,環境溫度以及信號極化方式改變等多重因素的影響,交叉耦合指標會不斷惡化,導致天線的跟蹤性能下降,因此需要定時校相。隨著我國航天事業的快速發展,在軌衛星等航天器的數量不斷增加,地面測控設備的長管任務變得日益繁重,因此需要一種快速簡單可靠的校相方法。
2 自跟蹤校相原理
式中μ為天線歸一化差斜率,ω為信號頻率。
差信號式中的和就是目標偏移天線電軸θ角在天線直角坐標系方位軸A和俯仰軸E上的角誤差信息。如圖1所示。
天線激勵器的和信號及差信號分別進入和差接收信道,經放大濾波變頻到達跟蹤接收機。和信號經跟蹤接收機跟蹤濾波后產生兩路正交信號:
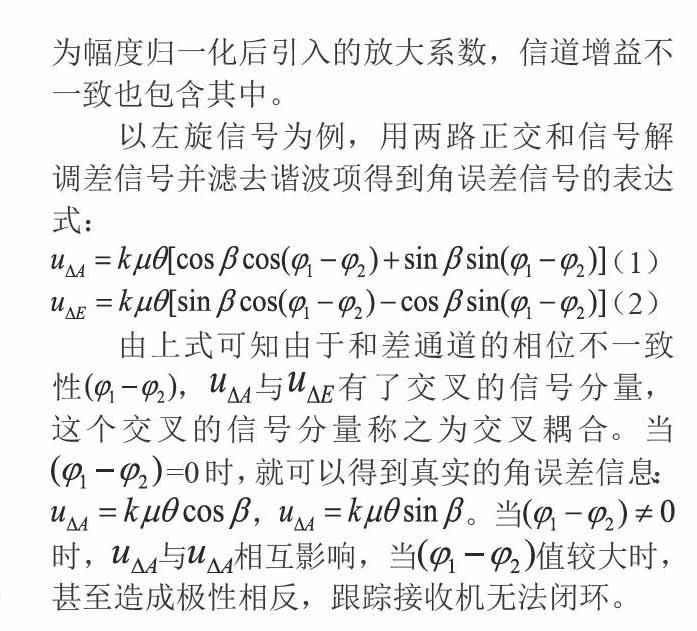
式中為變頻后的信號頻率,為和通道設備引入的相移,為差通道引入的相移,k為幅度歸一化后引入的放大系數,信道增益不一致也包含其中。
以左旋信號為例,用兩路正交和信號解調差信號并濾去諧波項得到角誤差信號的表達式:
由上式可知由于和差通道的相位不一致性,與有了交叉的信號分量,這個交叉的信號分量稱之為交叉耦合。當=0時,就可以得到真實的角誤差信息:,。當時,與相互影響,當值較大時,甚至造成極性相反,跟蹤接收機無法閉環。
3 常規校相方法
通過對自跟蹤校相原理的分析,常規的校相方法描述如下:
(1)找到天線電軸零點;
(2)天線僅在方位軸上偏離一定角度,跟蹤接收機俯仰相位校準后調整φE和kE;
(3)天線僅在俯仰軸上偏離一定角度,跟蹤接收機方位相位校準后調整φA和kA;
(4)檢查極性和交叉耦合。
第一步是這種方法的關鍵,天線電軸零點找不準,移相值φ和斜率修正系數k就無法正確得到,一般通過跟蹤閉環來找電軸零點。因此常規校相方法即“找零-校相-檢查交叉耦合-自跟蹤找零-校相”,如此循環數次直到交叉耦合滿足自跟蹤要求,流程復雜,耗時長久。
4 快速校相方法
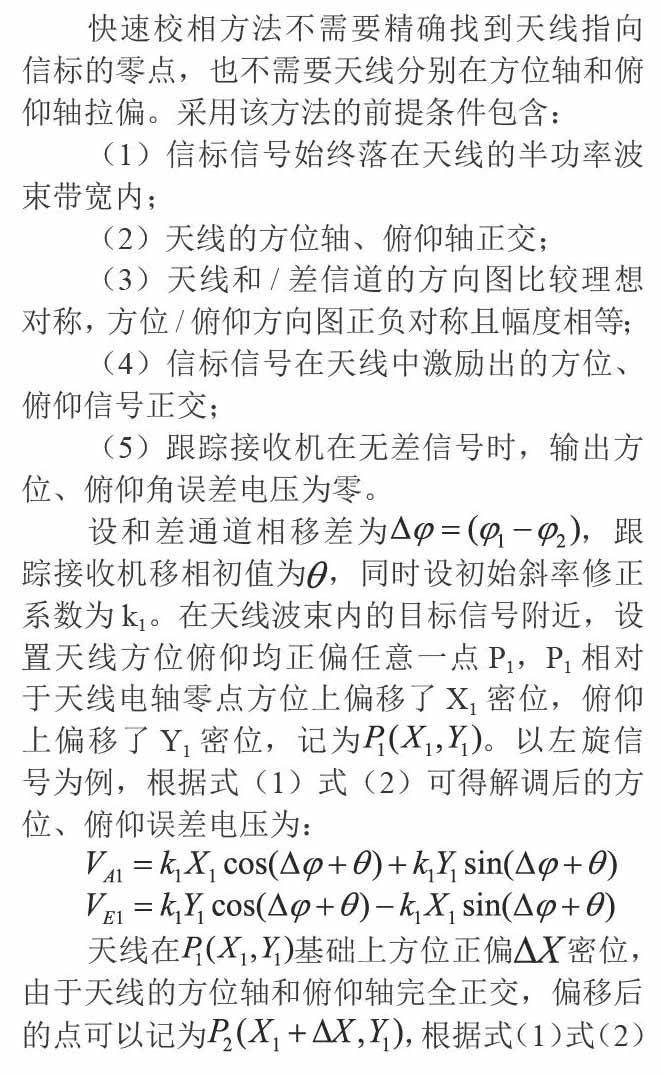
快速校相方法不需要精確找到天線指向信標的零點,也不需要天線分別在方位軸和俯仰軸拉偏。采用該方法的前提條件包含:
(1)信標信號始終落在天線的半功率波束帶寬內;
(2)天線的方位軸、俯仰軸正交;
(3)天線和/差信道的方向圖比較理想對稱,方位/俯仰方向圖正負對稱且幅度相等;
(4)信標信號在天線中激勵出的方位、俯仰信號正交;
(5)跟蹤接收機在無差信號時,輸出方位、俯仰角誤差電壓為零。
設和差通道相移差為,跟蹤接收機移相初值為,同時設初始斜率修正系數為k1。在天線波束內的目標信號附近,設置天線方位俯仰均正偏任意一點P1,P1相對于天線電軸零點方位上偏移了X1密位,俯仰上偏移了Y1密位,記為。以左旋信號為例,根據式(1)式(2)可得解調后的方位、俯仰誤差電壓為:
天線在基礎上方位正偏密位,由于天線的方位軸和俯仰軸完全正交,偏移后的點可以記為,根據式(1)式(2)可得此時解調后的方位、俯仰誤差電壓為:
5 結束語
這種校相方法具有以下優點:不需要先準確找天線電軸零點,目標信號在天線波束內,天線只需要一次拉偏就可以完成校相過程,增益系數可以一次得到。采用這種方法并輔以計算機自動控制技術,可以使校相時間就減少到數秒。
參考文獻
[1]趙業福 無線電跟蹤測量[M].北京:國防工業出版社,2003.
作者簡介
余海(1982-),男,現為中國電子科技集團公司第二十七研究所工程師。主要研究方向為航天測控。
作者單位
中國電子科技集團公司第二十七研究所 河南省鄭州市 450005