飛機(jī)側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)方案及仿真
2016-10-22 09:36:27曲東才程繼紅解傳軍
海軍航空大學(xué)學(xué)報(bào) 2016年3期
曲東才,程繼紅,解傳軍
(1.海軍航空工程學(xué)院a.控制工程系;b.科研部,山東煙臺(tái)264001;2.海軍航空兵學(xué)院四系,遼寧葫蘆島125001)
飛機(jī)側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)方案及仿真
曲東才1a,程繼紅1b,解傳軍2
(1.海軍航空工程學(xué)院a.控制工程系;b.科研部,山東煙臺(tái)264001;2.海軍航空兵學(xué)院四系,遼寧葫蘆島125001)
側(cè)向波束導(dǎo)引控制系統(tǒng)是飛機(jī)在自動(dòng)著陸時(shí)所采用的一種重要無(wú)線電波束導(dǎo)引系統(tǒng)。分析了側(cè)向波束導(dǎo)引控制系統(tǒng)原理,基于飛機(jī)協(xié)調(diào)控制,構(gòu)建一種側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)方案,在MATLAB平臺(tái)下,對(duì)所設(shè)計(jì)的側(cè)向波束導(dǎo)引控制系統(tǒng)進(jìn)行大量仿真研究。仿真結(jié)果顯示,所設(shè)計(jì)的側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)是合理的,當(dāng)其側(cè)向耦合器結(jié)構(gòu)參數(shù)設(shè)置準(zhǔn)確時(shí),可很好地改善導(dǎo)引控制系統(tǒng)的穩(wěn)定性及動(dòng)態(tài)品質(zhì)。
側(cè)向波束;偏差角;側(cè)向耦合器;導(dǎo)引控制規(guī)律;仿真研究
基于現(xiàn)代飛機(jī)的儀表自動(dòng)著陸系統(tǒng)主要包括縱向下滑波束導(dǎo)引系統(tǒng)、自動(dòng)拉平著陸系統(tǒng)以及側(cè)向波束導(dǎo)引控制系統(tǒng)等。飛機(jī)側(cè)向波束導(dǎo)引控制系統(tǒng)與縱向下滑波束導(dǎo)引系統(tǒng)有許多相似之處[1-2],均屬于一種軌跡控制系統(tǒng),因而可通過(guò)設(shè)計(jì)合理的側(cè)向姿態(tài)控制系統(tǒng)(側(cè)向軌跡控制系統(tǒng)的內(nèi)回路),優(yōu)化其滾轉(zhuǎn)角γ、偏航角ψ等輸出參數(shù),使作為外回路的側(cè)向波束導(dǎo)引控制系統(tǒng)的輸出參數(shù)波束偏差角λ減小,并使其趨于滾轉(zhuǎn)指令信號(hào)λg(λg=0°),即使飛機(jī)重心自動(dòng)轉(zhuǎn)向側(cè)向波束中心線,并最終精確導(dǎo)引飛機(jī)在著陸區(qū)安全著陸[3-5]。
1 側(cè)向波束導(dǎo)引控制簡(jiǎn)要分析
側(cè)向波束導(dǎo)引控制是基于設(shè)置在機(jī)場(chǎng)跑道中心線的延長(zhǎng)線上的航向信標(biāo)臺(tái)發(fā)射的無(wú)線電波,經(jīng)機(jī)上側(cè)向耦合器等無(wú)線電接受設(shè)備進(jìn)行信號(hào)接收、解調(diào)、變換、放大、比幅等處理后,獲得飛機(jī)重心偏離航向無(wú)線電波束中心線的信號(hào),通過(guò)側(cè)向耦合器變?yōu)闈L轉(zhuǎn)控制指令γg,并輸給自動(dòng)駕駛儀的滾轉(zhuǎn)通道,操縱副翼偏轉(zhuǎn)來(lái)改變航跡偏轉(zhuǎn)角ψs,自動(dòng)修正飛機(jī)水平方向上的航跡,使飛機(jī)對(duì)準(zhǔn)跑道中心線飛行[2,6-9]。
由此可見(jiàn),側(cè)向波束導(dǎo)引控制系統(tǒng)主要包括滾轉(zhuǎn)控制器(給出合理滾轉(zhuǎn)角γ信號(hào))、側(cè)向耦合器(將Δλ=λg-λ信號(hào)轉(zhuǎn)換為側(cè)向姿態(tài)角指令信號(hào))、相關(guān)運(yùn)動(dòng)學(xué)環(huán)節(jié)(將實(shí)時(shí)側(cè)向姿態(tài)角γ信號(hào)轉(zhuǎn)換為λ信號(hào))等。
2 側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)方案
在滾轉(zhuǎn)角控制回路基礎(chǔ)上建立飛機(jī)側(cè)向波束導(dǎo)引控制系統(tǒng)如圖1所示[2,10-13]。圖1中:G1(s)、G2(s)、?(s)分別是側(cè)向耦合器、相應(yīng)的運(yùn)動(dòng)學(xué)環(huán)節(jié)以及一自由度滾轉(zhuǎn)控制系統(tǒng)。
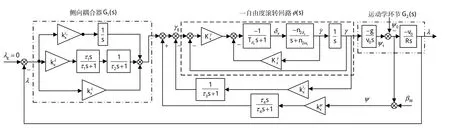
圖1 側(cè)向波束自動(dòng)控制系統(tǒng)結(jié)構(gòu)圖Fig.1 Automatic control system structural chart of lateral beam
由于飛機(jī)側(cè)向姿態(tài)控制系統(tǒng)有多種形式,因而原則上以λ作為控制參數(shù)的側(cè)向軌跡控制系統(tǒng)也可有多種形式。
為分析問(wèn)題方便和控制系統(tǒng)結(jié)構(gòu)設(shè)計(jì)簡(jiǎn)明扼要,假定β≈0,可略去偏航通道對(duì)滾轉(zhuǎn)通道的交聯(lián)作用,其飛機(jī)側(cè)向姿態(tài)控制系統(tǒng)的滾轉(zhuǎn)控制器僅采用一自由度滾轉(zhuǎn)傳遞函數(shù),而飛機(jī)偏航通道僅起協(xié)調(diào)作用,即這種側(cè)向波束導(dǎo)引控制系統(tǒng)結(jié)構(gòu)方案是在滾轉(zhuǎn)角運(yùn)動(dòng)回路基礎(chǔ)上,增加波束偏差角λ的反饋信號(hào)來(lái)構(gòu)成。
對(duì)G1(s)、G2(s)簡(jiǎn)要分析如下。
G1(s)是將波束偏差角信號(hào)Δλ轉(zhuǎn)換成滾轉(zhuǎn)指令信號(hào)γg。其耦合器輸出信號(hào)描述為:
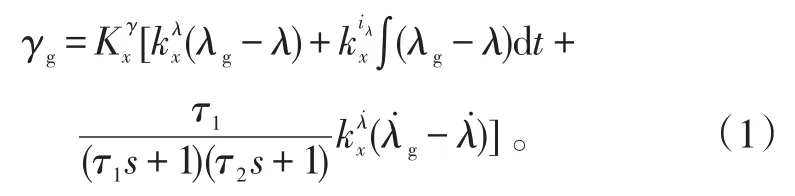
式(1)中:τ1、τ2分別為高通濾波器、低通濾波器時(shí)間常數(shù);為波束偏差角轉(zhuǎn)換成滾轉(zhuǎn)指令信號(hào)的比例系數(shù),為波束偏差角積分信號(hào)轉(zhuǎn)換成滾轉(zhuǎn)指令信號(hào)的比例系數(shù),為波束偏差角速率信號(hào)轉(zhuǎn)換成滾轉(zhuǎn)指令信號(hào)的比例系數(shù),分別為波束偏差角速率、波束偏差角及其積分到副翼舵偏角的傳動(dòng)比。
G1(s)中的波束偏差角(λg-λ)及其速率信號(hào)(λ˙g-λ˙)是基本的不可少的2種信號(hào)。引入波束偏差角速率信號(hào),可以保證系統(tǒng)穩(wěn)定工作,提高系統(tǒng)穩(wěn)定性和改善系統(tǒng)動(dòng)態(tài)品質(zhì),且此信號(hào)必須很強(qiáng)才能滿足系統(tǒng)穩(wěn)定性的要求;波束偏差角信號(hào)用來(lái)保證飛機(jī)穩(wěn)定在波束中心線上;積分信號(hào)∫(λg-λ)dt用來(lái)消除靜差,提高系統(tǒng)穩(wěn)態(tài)精度。
G2(s)是側(cè)向運(yùn)動(dòng)學(xué)環(huán)節(jié),即側(cè)向運(yùn)動(dòng)參數(shù)與波束偏差角λ的運(yùn)動(dòng)學(xué)關(guān)系。可基于飛機(jī)側(cè)向運(yùn)動(dòng)參數(shù)與飛機(jī)偏離波束中心線的偏差角λ之間的幾何關(guān)系圖進(jìn)行簡(jiǎn)單推得,由下式表示[2,14-17]:

式(2)中:Δψ為飛機(jī)縱軸偏離給定航向的偏航角偏差;R為飛機(jī)重心到航向信標(biāo)臺(tái)的距離(斜距);λ為飛機(jī)偏離航向信標(biāo)臺(tái)形成的波束中心線的偏差角;v0為飛機(jī)空速。
λ方向規(guī)定:當(dāng)飛機(jī)向信標(biāo)臺(tái)飛行時(shí),飛機(jī)在波束中心線右側(cè),λ>0;若在左側(cè),則λ<0。
式(2)表明波束偏差角λ近似正比于偏航角的積分。即若飛機(jī)存在偏航角偏差Δψ,則必將以積分形式使波束偏差角λ越來(lái)越大,同時(shí)隨著飛機(jī)接近地面,積分速率趨于無(wú)窮大,導(dǎo)引控制系統(tǒng)必將發(fā)散,這是各種導(dǎo)引系統(tǒng)的一般規(guī)律。因此,需要精心設(shè)計(jì)側(cè)向耦合器結(jié)構(gòu)及其控制規(guī)律參數(shù),以便能保證側(cè)向波束導(dǎo)引控制系統(tǒng)有良好的動(dòng)態(tài)性能與穩(wěn)態(tài)精度。
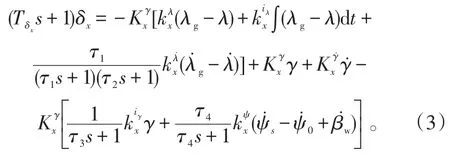
由圖1可獲得側(cè)向波束導(dǎo)引系統(tǒng)控制規(guī)律:
3 仿真研究
被控對(duì)象為某著陸狀態(tài)下的噴氣式運(yùn)輸機(jī)。著陸飛行速度為v0=95.0 m/s,相應(yīng)狀態(tài)下的滾轉(zhuǎn)傳遞函數(shù)γ(s)/δx(s)=-90.8/s(s+9.981),滾轉(zhuǎn)舵回路時(shí)間常數(shù)為0.5 s,飛機(jī)著陸時(shí)初始斜距R=11.5km,初始姿態(tài)角為偏航角ψ0=3°,Δβ=0.5°,常值滾轉(zhuǎn)干擾力矩導(dǎo)致的滾轉(zhuǎn)干擾舵偏角Δδxr=0.15°。飛機(jī)側(cè)向波束控制系統(tǒng)的內(nèi)回路,通過(guò)仿真選擇,其相應(yīng)的傳動(dòng)比為:。[18-19]
在指令信號(hào)λg=0°下,通過(guò)大量仿真,獲得在不同側(cè)向耦合器結(jié)構(gòu)參數(shù)(、、τ1、τ2)下的仿真曲線如圖2~4所示。
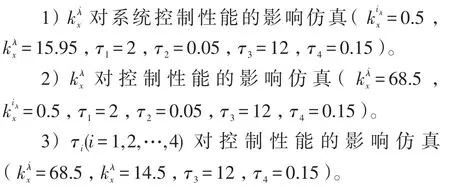
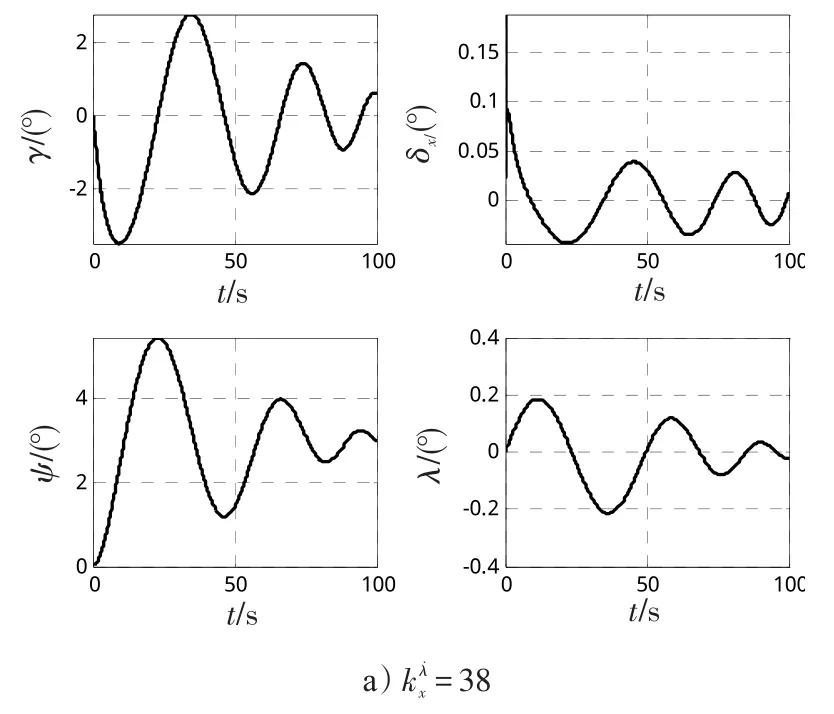
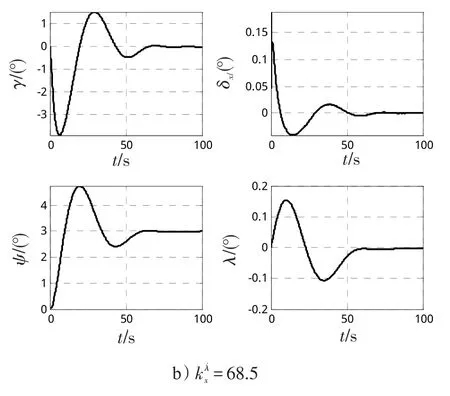
圖2 側(cè)向波束導(dǎo)引系統(tǒng)仿真曲線1Fig.2 Simultion curve 1 of airborne lateral beam guidance system
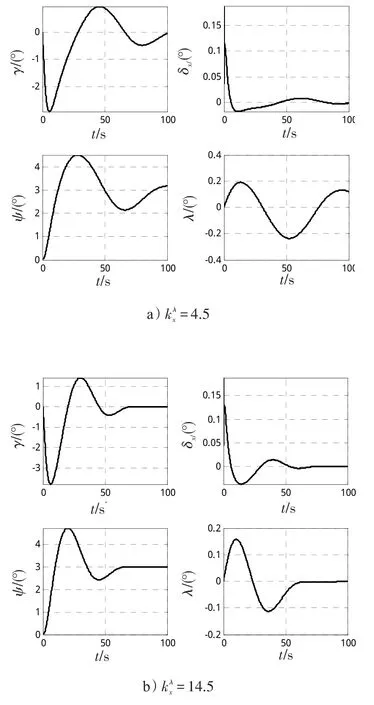
圖3 側(cè)向波束導(dǎo)引系統(tǒng)仿真曲線2Fig.3 Simultion curve 2 of airborne lateral beam guidance system
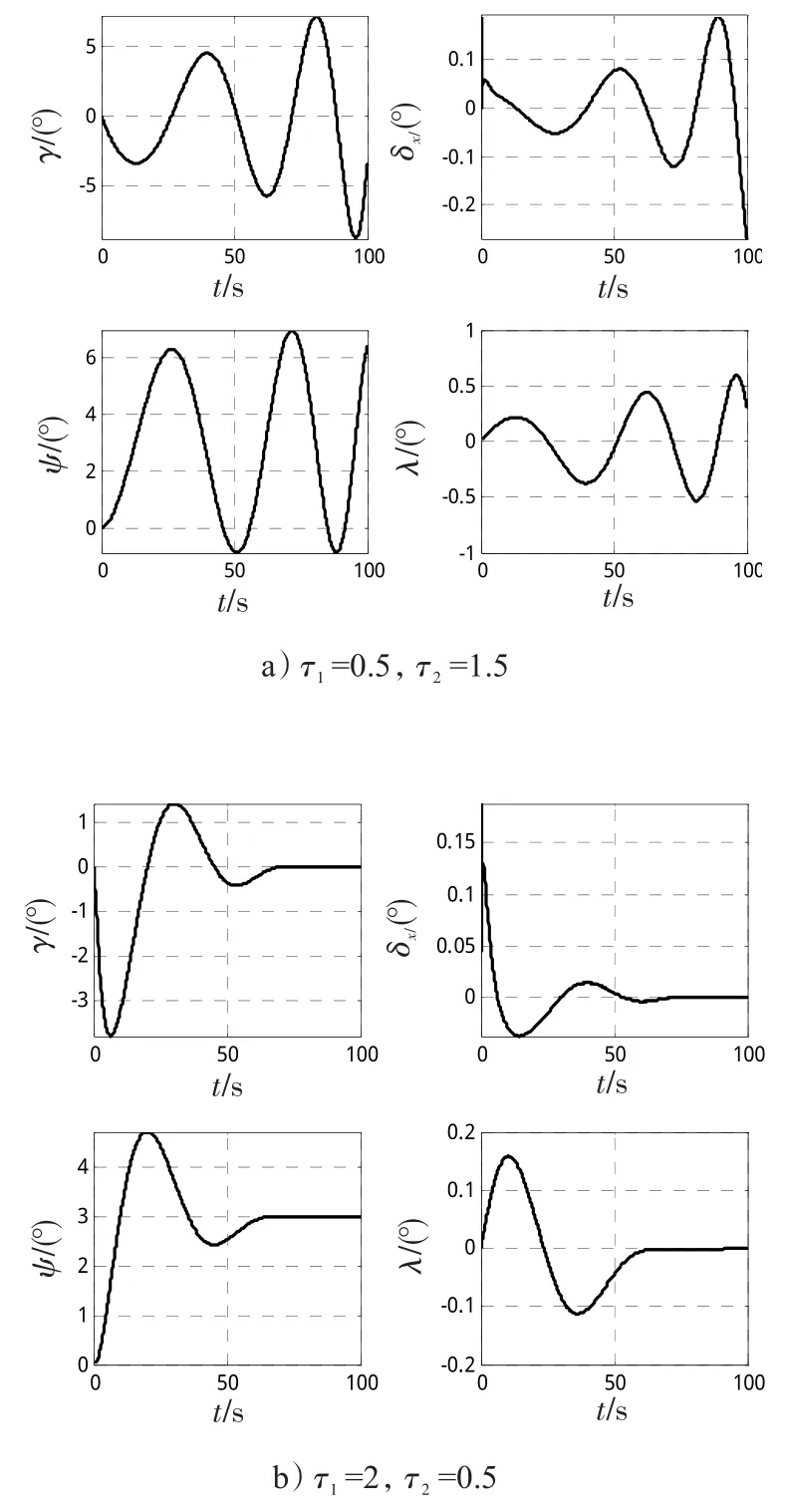
圖4 側(cè)向波束導(dǎo)引系統(tǒng)仿真曲線3Fig.4 Simultion curve 3 of airborne lateral beam guidance system
由以上仿真曲線可得以下結(jié)論:
1)由于運(yùn)動(dòng)學(xué)環(huán)節(jié)導(dǎo)致在飛機(jī)接近地面時(shí)致使系統(tǒng)發(fā)散,因而側(cè)向耦合器結(jié)構(gòu)參數(shù)的設(shè)置對(duì)側(cè)向波束導(dǎo)引控制系統(tǒng)穩(wěn)定性極為重要。合理設(shè)置、、τ1、τ2等耦合器結(jié)構(gòu)參數(shù)對(duì)提高系統(tǒng)穩(wěn)定性和改善系統(tǒng)動(dòng)態(tài)品質(zhì)是重要一環(huán)。
2)當(dāng)側(cè)向耦合器結(jié)構(gòu)參數(shù)設(shè)計(jì)合理時(shí),側(cè)向波束導(dǎo)引系統(tǒng)的輸出信號(hào)側(cè)向波束偏差角信號(hào)λ將會(huì)精確跟蹤給定的指令信號(hào)λg=0°。λ角在80 s左右基本達(dá)到穩(wěn)定,并具有較高穩(wěn)態(tài)精度;同時(shí)γ、ψ、δx等信號(hào)也趨于穩(wěn)定狀態(tài)。
4 結(jié)論
基于大量仿真可見(jiàn),所設(shè)計(jì)的飛機(jī)側(cè)向波束導(dǎo)引系統(tǒng)是合理可行的,但這是建立在側(cè)向協(xié)調(diào)控制,即β=0,將側(cè)向姿態(tài)控制系統(tǒng)簡(jiǎn)化為一自由度滾轉(zhuǎn)運(yùn)動(dòng)基礎(chǔ)上的。實(shí)際上,一般很難精確滿足β=0,導(dǎo)致滾轉(zhuǎn)和偏航運(yùn)動(dòng)是耦合的,因而要精確設(shè)計(jì)側(cè)向波束導(dǎo)引控制系統(tǒng),還要基于側(cè)向全面運(yùn)動(dòng)。為保證側(cè)向波束導(dǎo)引控制系統(tǒng)在飛機(jī)的整個(gè)著陸過(guò)程中具有良好穩(wěn)定性和動(dòng)態(tài)響應(yīng),側(cè)向耦合器結(jié)構(gòu)及其參數(shù)設(shè)置也是極其重要的,但要獲得“純粹”的波束偏差角速率信號(hào)是很困難的,實(shí)際中一般采用補(bǔ)償方法來(lái)獲得,同時(shí)R也應(yīng)隨飛機(jī)接近著陸點(diǎn)實(shí)施調(diào)參,而不是固定不變的。
[1]文傳源.現(xiàn)代飛行控制[M].北京:北京航空航天大學(xué)出版社,2004:143-196. WEN CHUANYUAN.Modern flight control[M].Beijing:Beihang University Press,2004:143-196.(in Chinese)
[2]張明廉.飛行控制系統(tǒng)[M].北京:國(guó)防工業(yè)出版社,1984:268-282. ZHANG MINGLIAN.Flight control system[M].Beijing:National Defense Industry Press,1984:268-282.(in Chinese)
[3]BRIAN L S,F(xiàn)RANK L L.Aircraft control and simulation[M].Hoboken,New Jersey:John Wiley&Sons.Inc.,1992:109-114.
[4]CHRISTOPHER FIELDING,et al.Advanced techniques for clearance of flight control laws[M].Berling:Sprinter,2002:180-205.
[5]MARK R A,DAVID K S.Closed-loop pilot vehicle analysis of the approach and landing task[J].Journal of Guidance,1987,10(4):187-194.
[6]朱策,方振平.飛機(jī)著陸下滑狀態(tài)人—機(jī)系統(tǒng)動(dòng)態(tài)特性分析[J].航空學(xué)報(bào),2000,21(6):500-503. ZHU CE,F(xiàn)ANG ZHENPING.Pilot-aircraft system analysis of the approach and landing task[J].Aeronautica Journal,2000,21(6):500-503.(in Chinese)
[7]TALOLE S E,RAVIN BANAVAR.Proportional navigation through predictive control[J].Journal of Guidance,2003,21(6):1004-1006.
[8]YOSHIKAZU MIYAZAWA,TOSHIKAZU MOTODA. Longitudinal landing control law for an autonomous reentry vehicle[J].Control and Dynamics,1999,22(6):791-800.
[9]BABAY,TAKANO H,MIYAMOTO S,et al.Air combat guidance law for an UCAV[C]//AIAAs'1stTechnical Conference and Workshop on Unmanned Aerospace Vehicles. Virginia:AIAA,2002:AIAA2002-3427.
[10]張卓,曲東才,陳勇,等.某型飛機(jī)γ角姿態(tài)控制系統(tǒng)方案設(shè)計(jì)及仿真研究[J].海軍航空工程學(xué)院學(xué)報(bào),2012,27(4):138-142. ZHANG ZHUO,QU DONGCAI,CHEN YONG,et al. Project desigin of aeroγangle attitude control system and simulation study[J].Journal of Naval Aeronautical and Astronautical University,2012,27(4):138-142.(in Chinese)
[11]吳建,章衛(wèi)國(guó),寧東方.側(cè)向飛行控制律設(shè)計(jì)與仿真[J].計(jì)算機(jī)仿真,2008,25(12):66-69. WU JIAN,ZHANG WEIGUO,NING DONGFANG.Design and simulation of aero lateral control law[J].Computer Simulation,2008,25(12):66-69.(in Chinese)
[12]陳懷民,徐奎,王鵬,等.基于無(wú)尾飛機(jī)橫側(cè)向控制律參數(shù)優(yōu)化設(shè)計(jì)的一種方法[J].西北工業(yè)大學(xué)學(xué)報(bào),2007,25(4):585-589. CHEN HUAIMIN,XU KUI,WANG PENG,et al.A more applicable approach to parameter-optimal design for lateral control system of tailless aircraft[J].Journal of Northwestern Polytechnical University,2007,25(4):585-589.(in Chinese)
[13]蘇希爾·古普塔.控制系統(tǒng)基礎(chǔ)[M].北京:機(jī)械工業(yè)出版社,2004:248-291. SUDHIR GUPTA.Elements of control systems[M].Beijing:China Machine Press,2004:248-291.(in Chinese)
[14]曲東才,謝曦鵬,曹棟,等.飛機(jī)下滑波束導(dǎo)引系統(tǒng)設(shè)計(jì)與仿真[J].海軍航空工程學(xué)院學(xué)報(bào),2014,29(3):209-212. QU DONGCAI,XIE XIPENG,CAO DONG,et al.Design and simulation researches of aero glide beam guidance system[J].Journal of Naval Aeronautical and Astronautical University,2014,29(3):209-212.(in Chinese)
[15]BARTON B J,DARID K S.An optimal control approach to pilot/vehicle analysis and the Neal-Smith criteria[J]. Guidance,1983,6(6):339-347.
[16]程繼紅,曲東才.某型飛機(jī)角位移自動(dòng)駕駛儀比例式控制規(guī)律設(shè)計(jì)與仿真[J].海軍航空工程學(xué)院學(xué)報(bào),2011,26(3):241-245. CHENG JIHONG,QU DONGCAI.Design and simulation of the proportional control law for aircraft angular displacement autopilot[J].Journal of Naval Aeronautical and Astronautical University,2011,26(3):241-245.(in Chinese)
[17]劉鵬,谷良賢.高超聲速飛行器動(dòng)態(tài)輸出反饋?zhàn)顑?yōu)跟蹤控制[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2011,43(7):151-154. LIU PENG,GU LIAGNXIAN.Dynamic output feedback based optimal tracking for hypersonic flight vehicles[J]. Journal of Herbin Institute of Technology,2011,43(7):151-154.(in Chinese)
[18]王美仙,李明,張子軍.飛行器控制律設(shè)計(jì)方法發(fā)展綜述[J].飛行力學(xué),2007,25(2):1-5. WANG MEIXIAN,LI MING,ZHANG ZIJUN.Introduction to the development of aircraft control law designed method[J].Flight Mechanics,2007,25(2):1-5.(in Chinese)
[19]趙廣元.Matlab與控制系統(tǒng)仿真實(shí)踐[M].北京:北京航空航天大學(xué)出版社,2009:199-203. ZHAO GUAGNYUAN.Emulation study of Matlab and control system[M].Beijing:Beihang University Press,2009:199-203.(in Chinese)
Scheme Design and Simulation of Aero Lateral Beam Guidance Control System
QU Dongcai1a,CHENG Jihong1b,XIE Chuanjun2
(1.Naval Aeronautical and Astronautical University a.Department of Control Engineering;b.Department of Scientific Research,Yantai Shandong 264001,China;2.The 4thDepartment of Naval Avation Institute,Huludao Liaoning 250011,China)
The aero lateral beam guidance system is an important radio wave guidance control system in airplane auto land. The basis work principle of the aero lateral beam guidance control system was briefly analyzed,and basis on assumption aero lateral harmonious control foundation,the compendious structure scheme of aero lateral beam guidance system was designed.Lastly,a great deal of simulation researches was done to designed aero lateral beam guidance system under the MATLAB platform.Simulation results showed that the designed structure scheme of aero lateral beam guidance system was reasonable,and when parameters of the lateral coupler was reasonable set on,stability and dynamic qualities of the designed control system were greatly improved.
lateral beame;deviation angle;lateral coupler;guidance control law;simulation research
V249.12
A
1673-1522(2016)03-0332-05DOI:10.7682/j.issn.1673-1522.2016.03.006
2016-02-14;
2016-04-15
曲東才(1964-),男,教授,博士。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
