智能講解機器人的設計及系統搭建
2016-10-26 03:10:20王荔檬
科學中國人 2016年26期
王荔檬
南寧職業技術學院機電工程學院
智能講解機器人的設計及系統搭建
王荔檬
南寧職業技術學院機電工程學院
本文通過開展智能講解機器人的研究,實現講解機器人的結構設計和系統搭建,所設計機器人具有循跡行走、定點講解和與障礙急停報警等功能,能夠應用于圖書館、博物館及歷史古跡等場所替代人工講解工作,解決了現有場館講解員短缺和工作強度大的問題,具有廣泛的推廣應用價值。
智能;講解機器人;電路設計
一、緒論
本文擬設計一智能循跡式講解機器人,該機器人能夠在博物館和展覽館等場所使用,按照場所預定最佳講解路徑行走且在預設地點進行精確定點講解,同時針對博物館和展覽館等場所的兒童較多的情況,設置機器人在運動過程中具有遇到障礙急停以及語音報警功能。
通過相關文獻查詢和實際工作條件的探討,本文設計智能機器人擬包括以下幾項功能:
(1)講解機器人的循跡行走;
(2)講解機器人的運動底盤結構設計;
(3)講解機器人的定點講解;
(4)講解機器人遇障時的緊急停止;
(5)講解機器人的搭建和運行調試。
二、智能講解機器人的結構設計
講解機器人的框架結構作為機器人電控組件的安裝平臺和整體機器的支撐部分,起著至關重要的作用,對于它的設計要綜合考慮機器人的行走方式、結構組件及控制方式等,本章通過以下幾個部分來確定智能講解機器人的最終結構。
船舶設備在安裝中由于組件安裝的體積較大,重量較大,因此在安裝中通常借助起吊機,手工輔助機械裝置,進行相關組件設備的安裝。在此過程中分析大型組件設備安裝中的減振措施,對于設備安裝中的準確性提升意義重大。具體分析在實際發展中設備安裝準確性的保障,對于設備后期的應用質量保障,以及設備的實際應用效果提升奠定了良好的基礎。其中具體分析船舶設備安裝的準確性,主要體現在船舶設備安裝位置,安裝高度,安裝水平度的準確性,確保其設備組件后期在運行中的穩定性和合格性。
1、運動部件設計
機器人的運動方式主要有輪式和履帶式兩種,如圖1所示,履帶式結構主要應用于野外、凹凸地面或沙漠等惡劣環境中,本文所設計講解機器人主要工作在博物館或展覽館等室內場所,工作環境比較平坦,且對噪聲高低要求較高,據此選用輪式運動結構。輪式結構運動不僅運動精確度高,運動速度快,且能夠避免履帶式結構運動的噪聲較大問題。

圖1 輪式運動結構和履帶式運動結構
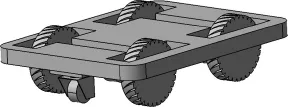
圖2 運動底盤三維圖
基于選定的輪式運動方式進行本文的運動部件設計,所設計運動底盤結構如圖2所示,該運動底盤左右各布置兩主動輪,用以控制機器人的運動路徑,通過控制板對兩主動輪實現差速控制,完成整體機器人依規劃路徑的運動,同時布置兩萬向輪作為輔助輪,用以輔助轉向運動和緩解上部壓力突然增大對結構的沖擊。
2、電子艙的設計
智能講解機器人的控制部分較為精密復雜,為了后期的檢修和裝配方便。本設計特別為電控組件部分設計專用電子艙用以放置所有的電控元件和電路板,所設計電子艙能夠直接從結構中快速拆下,且為電線等排線設計專用道,保證人員安全和避免內部電路相互之間的電磁干擾。
3、講解機器人的整體底盤設計
基于之前選定的輪式運動方式和電子艙方案的確定,展開整體底盤的設計,底盤充分考慮運動場所和運動方式,以及主要零部件的尺寸,進行整體的設計,并利用三維軟件對所設計結構進行組件干涉檢查。
4、機器人外形設計
機器人外形設計采用定制化設計,在3D打印機的輔助下,依據用戶要求和場所的特點進行定制化、特性化設計,保證了機器人的獨特性與創新性,能夠給參觀者不同的視覺感和新鮮感,對于各個不同主題的展館,單獨設計避免重復性也是更能夠保證講解機器人與場館的契合性。
三、講解機器人的電路設計
智能講解機器人的使用場所預設為博物館和展覽館等場所,此類場所都具有較為特定的參觀和講解路徑,依據場館的特殊性,選擇循跡式行走控制方式作為本文所設計講解機器人的控制方式,循跡式控制方式能夠按照預定路線進行運動,確保路線的準確性,相較于其它控制方式安全性更高。

圖3 單片機模塊及傳感器模塊
利用單片機和紅外光電傳感器實現循跡式運動的控制電路,如圖3所示,利用光電傳感器對路面進行差色對比,實時分析機器人行走路線是否正確,在機器人行走出現偏移預定軌跡的情況時,傳感器安裝于小車中心線正上方,單片機通過讀取傳感器反饋信號并進行PWM調速控制,差速控制左右兩主動輪的驅動電機的快速、慢速及停止功能,用以保證底盤中心處于軌跡中心線上方。
除了循跡運動外,本文所設計的智能講解機器人還應具有遇到障礙物時的緊急停止功能,同樣在光電傳感器的輔助下,在小車的前進路徑感測出現的障礙物并實現緊急停止以保證場館中的人員安全。本文所設計小車還設置有藍牙遠程遙控程序,增加智能機器人的可操控性和游戲性,對于展覽館等兒童較多的場所更加適宜。
智能講解機器人的講解功能利用GPS組件來實現機器人的精確定位及講解語音的啟動,智能講解利用成型模塊實現,所以功能不做具體介紹。
四、講解機器人的仿真實驗
圖4 循跡電路測試
本文所設計之智能講解機器人最重要的功能就是按照預定路線的行走的性能,仿真實驗主要測試電路性能,采用縮小版的底盤進行測試,測試過程如圖4所示,經過測試可以清楚的看到,所設計電路能夠非常好的實現行走功能,在曲線處的轉彎也沒有非常大的停頓現象,可以用該電路系統實現機器人的控制。
五、總結
本文通過現今機器人對于現實生活的影響為基礎,設計了智能講解機器人的整機結構,并進行了機器人電路系統的運動和避障功能測試,本文所設計之智能講解機器人能夠服務于博物館和展覽館等需要講解服務的場所,不僅能夠大大節省人力且易于維護,耐用度高,更是對于專業講解人員短缺的巨大補充,通過本項目的研究期待后期能夠擴大智能服務類機器人的種類和幫助有先天缺陷的人群更好的生活和融入社會。
[1]唐建平.復雜環境中移動機器人的路徑規劃[D].鄭州大學,2012.
[2]徐國華,譚民.移動機器人的發展現狀及趨勢[J].機器人技術與應用,2001(3):7-13.
[3]祝曉才.輪式移動機器人的運動控制[D].國防科學技術大學,2006.
[4]朱磊磊,陳軍.輪式移動機器人研究綜述[J].機床與液壓,2009,37(8):242-247.
[5]丁小平,王薇,付連春.光纖傳感器的分類及其應用原理[J].光譜學與光譜分析,2006,26(6):1176-1178.
[6]姜義.光電編碼器的原理與應用[J].傳感器世界,2010,2:16-22.
王荔檬(1985-),女,于2015年于長春理工大學獲得工學博士學位,現為南寧職業技術學院機電工程學院機械制造及設計專業骨干教師,從事教學和科研工作。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17