壓電陶瓷遲滯非線性前饋補償器
2016-11-02 03:29:32徐新行姜振華王挺峰
光學精密工程 2016年9期
方 楚,郭 勁,徐新行,姜振華,王挺峰
(1.中國科學院 長春光學精密機械與物理研究所激光與物質相互作用國家重點實驗室,吉林 長春 130033;2.中國科學院大學,北京 100049)
?
壓電陶瓷遲滯非線性前饋補償器
方楚1,2,郭勁1,徐新行1,姜振華1,王挺峰1
(1.中國科學院 長春光學精密機械與物理研究所激光與物質相互作用國家重點實驗室,吉林 長春 130033;2.中國科學院大學,北京 100049)
為了有效補償壓電陶瓷的遲滯非線性, 提出了基于STOP算子的改進PI模型以改善傳統基于PLAY算子的PI模型解析求逆的復雜過程以及通過插值算法求逆的大量耗時。介紹了傳統的基于PLAY算子和基于STOP算子的PI模型,然后基于STOP算子的疊加形式建立了以預期位移為輸入,以控制電壓為輸出的PI模型, 并將這一模型直接作為前饋控制器補償壓電陶瓷的遲滯效應。為了更好地平衡全局尋優與局部尋優能力, 對粒子群優化算法進行了改進,利用其辨識出各算子的權值。最后,利用實驗的方法驗證了改進的PI模型對遲滯非線性的補償效果。進行了兩組實驗測試, 結果顯示:無論對于規律變化還是隨機變化的輸入,提出的改進PI模型都可以很好補償遲滯非線性,跟蹤誤差可控制在1%以內。因此,基于STOP算子的改進PI模型在壓電陶瓷控制領域中具有很好的實用價值。
壓電陶瓷;遲滯非線性;前饋補償器;PI模型;STOP算子
1 引 言
由于具有亞納米級分辨率、亞微秒級的響應時間、數百牛頓的驅動力以及數萬赫茲的諧振頻率,壓電陶瓷在微驅動、微測量領域中得到了廣泛研究與應用[1-5]。與電荷控制的壓電陶瓷系統不同,在通過電壓控制壓電陶瓷的系統中,壓電陶瓷與控制電壓呈現非線性,其最主要的非線性因素是遲滯效應,是影響壓電陶瓷控制精度的主要原因[6]。
國內外研究人員針對壓電陶瓷的遲滯現象研究大體可分為兩類:一類是根據壓電陶瓷的微觀機理建立物理方程,通過聯立方程求解出輸入電壓與輸出位移的關系[7-8],另一類則忽視壓電陶瓷的微觀機理,根據壓電陶瓷輸入電壓和輸出位移的關系建立數學模型。由于第二種方法具有形式簡單、便于改進、精度較高等優點,目前工程中多采用數學模型對壓電陶瓷進行建模研究。
壓電陶瓷的數學模型分為兩類:一類是微分方程形式的數學模型,包括Bouc-Wen模型[9-10],多項式模型[11],Duhem模型[12]等,另一類是算子疊加形式的數學模型,主要是指Preisach模型[13]和Prandtl-Ishlinskii模型(簡稱PI模型)[14]。微分方程形式的數學模型由于考慮了輸入變化率對輸出的影響,因此對于高帶寬遲滯非線性的補償具有一定作用,然而對于輸入變化緩慢的系統,具有算子疊加形式的數學模型具有更簡單的形式,其中PI模型因為其解析形式的逆模型的存在而受到更多研究者的青睞。
國內外研究人員大多采用基于PLAY算子的PI模型對壓電陶瓷進行建模,然后以其解析逆模型作為遲滯補償的前饋控制器,或是利用插值算法逐一計算達到預期位移所需要的控制電壓值,或是把此數學模型作為控制對象重新設計前饋補償器[15]。但當研究人員對PI模型進行改進后,逆模型的解析形式就不容易獲得,而插值算法在工程應用中要花費較多的時間,會影響補償器的實時性,本文根據實驗獲得的壓電陶瓷輸出位移與輸入電壓的關系,建立STOP算子疊加形式的以預期位移為輸入,以控制電壓為輸出的PI模型,將這一模型直接作為前饋控制器補償遲滯效應,從而避免了復雜的求解逆模型過程并節省了插值算法所花費的時間。
2 改進PI模型
2.1PI模型的基本算子
PI模型的基本算子包括PLAY算子與STOP算子。PI模型基本算子如圖1所示,PLAY算子可以描述壓電陶瓷輸出位移隨驅動電壓變化規律:當驅動電壓變化時,壓電陶瓷輸出位移并不是馬上變化,而是等驅動電壓變化到閾值時算子的輸出才發生變化。
基于PLAY算子的PI模型的離散數學形式為:
y(t)=max{x(t)-r,min{x(t)+r,y(t-T)}},
(1)
(2)
其中:x(t)為模型的輸入,一般為壓電陶瓷的驅動電壓,H(x(t))為模型的輸出,一般為壓電陶瓷的輸出位移,r為算子的閾值,y(t)為算子的輸出值,i為閾值的序號,wi為算子的權值。

圖1 PI模型基本算子
STOP算子最初被用來研究材料的屈服應力[16],由于STOP算子的軌跡為順時針,而PLAY算子的軌跡為逆時針,因此可以把STOP算子看作PLAY算子的逆過程,利用STOP算子可以研究壓電陶瓷的預期位移與驅動電壓之間的關系。
基于STOP算子的PI模型的離散數學形式為:
yi(t)=min{ri,max{-r,x(t)-
x(t-T)+yi(t-T)}},
(3)
(4)
2.2基于STOP算子的改進PI模型
基于STOP算子的PI模型可以預測壓電陶瓷達到預期位移時所需要的控制電壓,其作為前饋補償器將預測出所需的控制電壓輸入給壓電陶瓷,就可以實現壓電陶瓷的輸出位移與預期位移之間的線性關系。
由于壓電陶瓷的輸出位移只能是正值,因此STOP算子的下限閾值應全部為零,而為了方便辨識權值,上限閾值取ri=(i/n)×x(t)max,如果把壓電陶瓷的輸入輸出進行歸一化處理,則上限閾值取ri=i/n,n為閾值的數目,i=0,1,2,…,n-1。
則STOP算子變為:
yi(t)=min{ri,max{0,x(t)-
x(t-T)+yi(t-T)}}.
(5)
經過改變的STOP的算子會出現一個問題:對于上限閾值為0的算子,任何輸入對算子的輸出沒有影響,即無論輸入為何值,算子的輸出都為零。為了有效利用輸入為0~0.1之間的實驗數據,將PI模型改為:

(6)
其中:f(x(t))為關于x的連續函數,合理選擇f(x(t)) 的形式可以使前饋補償器具有更合理的補償方案。
由于遲滯曲線具有對稱率無關的性質,因此令f(x(t))=αx,即在STOP算子疊加項之前增加線性項,即可充分利用輸入為0~0.1之間的實驗數據,其中α為線性項的權值。式(5)與式(6)成為基于STOP算子的改進PI模型,其輸入為預期位移,輸出為控制電壓,把它作為壓電陶瓷的前饋控制器,可以實現預期位移輸入與實際位移輸出的線性關系。直接用這種模型作為前饋控制器,避免了基于PLAY算子的PI模型的復雜解析求逆過程,同時也節省了通過插值算法求PI逆模型的時間。
3 改進PI模型的權值辨識
3.1實驗設備
在辨識權值之前需要獲得壓電陶瓷的輸入輸出實驗數據,因此搭建如圖2所示的實驗設備。通過個人計算機對壓電陶瓷控制箱進行操縱,使其向壓電陶瓷輸入0~100 V單調遞增以及100~0 V單調遞減的離散電壓值,同時,利用電感測微儀測量壓電陶瓷的輸出位移。為了提高測量精度,壓電陶瓷與菱形微位移線性放大機構配合使用使壓電陶瓷的輸出位移得到放大,電感測微儀的探頭處于位移放大機構的輸出端。
由于前饋控制器是率無關PI模型,即實驗輸入輸出數據不能受到輸入數據變化速率的影響,因此測量的過程比較緩慢。每輸入一個離散電壓值通過電感測微儀進行一次讀數,獲得如圖3所示的實驗數據。把橫縱坐標進行了調換,即把H(t) 放在橫坐標作為輸入,把V(t)放在縱坐標作為輸出,這樣圖形的軌跡變為順時針,與STOP算子的軌跡相吻合,然后可以通過調整改進PI模型的權值來擬合實驗中V(t)與H(t)的關系。
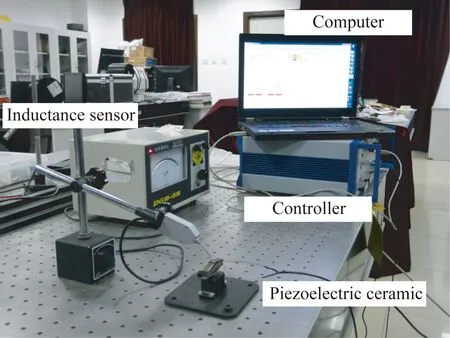
圖2 實驗設備
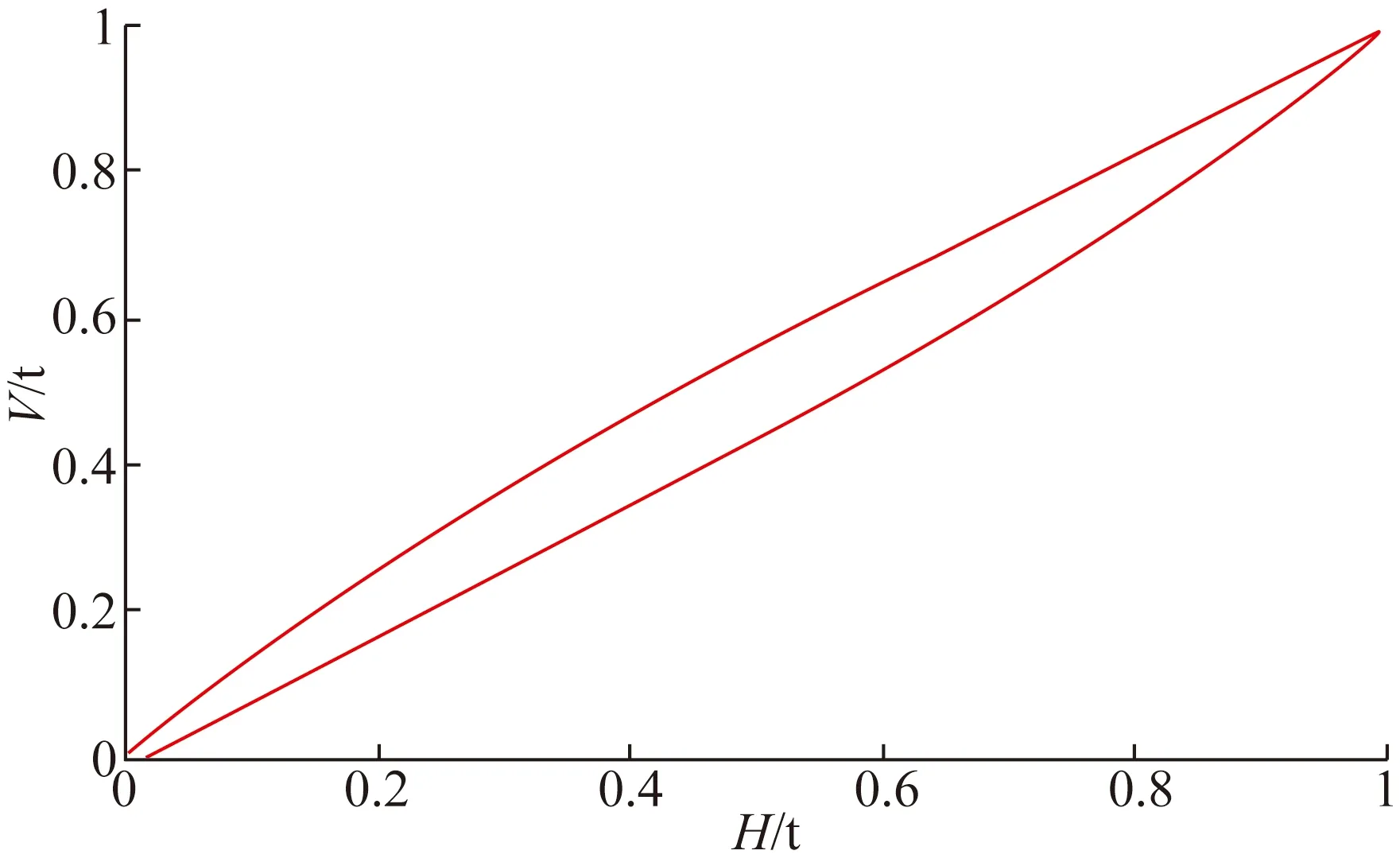
圖3 實驗測得壓電陶瓷輸入輸出數據關系曲線
3.2權值辨識
3.2.1經典粒子群優化算法
粒子群優化算法[17](Particle Swarm Optimization,PSO)是一種智能高效的尋優算法。結構簡單,具有強大的局部尋優能力,然而當尋優參數較多時,PSO算法很容易陷入局部極值,國內外研究人員大多通過對PSO算法進行改進使其針對不同情況獲得不同的解決方案。[18]
在粒子群理論中,位置向量與速度向量是兩個重要的概念。位置向量由所有需要辨識的參數組成,各粒子通過自身學習與相互學習以求獲得具有最佳適應值的位置向量,而速度向量就是每次迭代中對位置向量的校正。粒子群算法的規則為:
vi(t+1)=wvi(t)+c1r1(pi(t)-xi(t))+
c2r2(pg(t)-xi(t)),
(7)
xi(t+1)=xi(t)+vi(t+1),
(8)
其中:xi表示第i個粒子的位置向量,vi表示第i個粒子的速度向量,pi為第i個粒子的歷史最優位置,pg為所有粒子的最優位置,w為慣性權值,c1、c2為學習因子,r1、r2為0~1之間的隨機數,t為迭代次數。
3.2.2改進粒子群尋優算法
慣性權值與學習因子是影響粒子群優化算法的主要參數,會影響全局尋優與局部尋優之間的平衡。為了達到更好的尋優效果,對3個結構參數進行修改,使它們不再為常數,而是在每次迭代中都會在一定范圍內取隨機值。
具體的改變措施分為兩部分:第一部分是為每一個結構參數取一個上限值和一個下限值,然后使結構參數在兩個極值之間隨機取值,其結構參數為:
ε=εmin+(εmax-εmin)×r,
(9)
其中:ε表示慣性權值或學習因子。通過設置不同的上限下限可以調整粒子對于全局尋優與局部尋優能力的平衡,而隨機取值可以使粒子在迭代中具有更好的適應能力。
第二部分是將每一個結構參數分成兩部分,其中大多部分的結構參數變化范圍較小,保證了較強的局部尋優能力;而較少一部分的結構參數變化范圍較大,從而保證粒子群有足夠的全局尋優能力。由于3個結構參數中每個參數都具有不同的2種取值范圍,因此可以組合出8種性質不同的粒子。由于不同的粒子具有不同的尋優能力,使得改進的粒子群尋優算法搜索更為全面。
3.2.3粒子群優化算法的對比
為了證明改進粒子群算法對于基于STOP算子的PI模型中的參數辨識具有更優的性質。就要用它與其它改進粒子群算法進行對比。引入3個經典的粒子群算法[19]。
PSO-w:特點是在迭代中慣性權值線性遞減,使粒子群在開始迭代時具有較強的全局尋優能力,在迭代后期具有較強的局部尋優能力。其參數取wmax=0.9,wmin=0.4,c1=c2=2.0。
PSO-rw:特點是在迭代中慣性權值隨機取值,而學習因子為固定值。其參數取w=0.5+0.5×r,c1=c2=1.494。
PSO-cf:引入了收縮因子,使粒子群具有更強的局部尋優能力,但是全局尋優能力受到了削弱。其參數經過換算后取w=0.729 8,c1=c2=1.496。
粒子群參數取值如下:慣性權值w分成2個大小相同的組,第一組的上限值為1.0,下限值為0.4;第二組的上限值為0.8,下限值為0.6。學習因子c1和c2分成大小不同的兩組,較大的那一組占有粒子的數目是較小組的2倍。數目較多的那一組的上限值為2.0,下限值為0;數目較少的那一組的上限值為2.0,下限值為-0.5。
4種粒子群尋優算法的粒子數設定為60,迭代次數為600,其目標函數為:
(10)
其中:hactual為壓電陶瓷輸出的位移,hmodel為PI模型輸出的位移,N為實驗數據的數量。
為了減少粒子群初始隨機位置對尋優結果的影響,統計了100次的試驗結果,采用各粒子群優化算法辨識PI模型權值時目標函數平均值隨著迭代次數的變化統計結果如圖4所示。
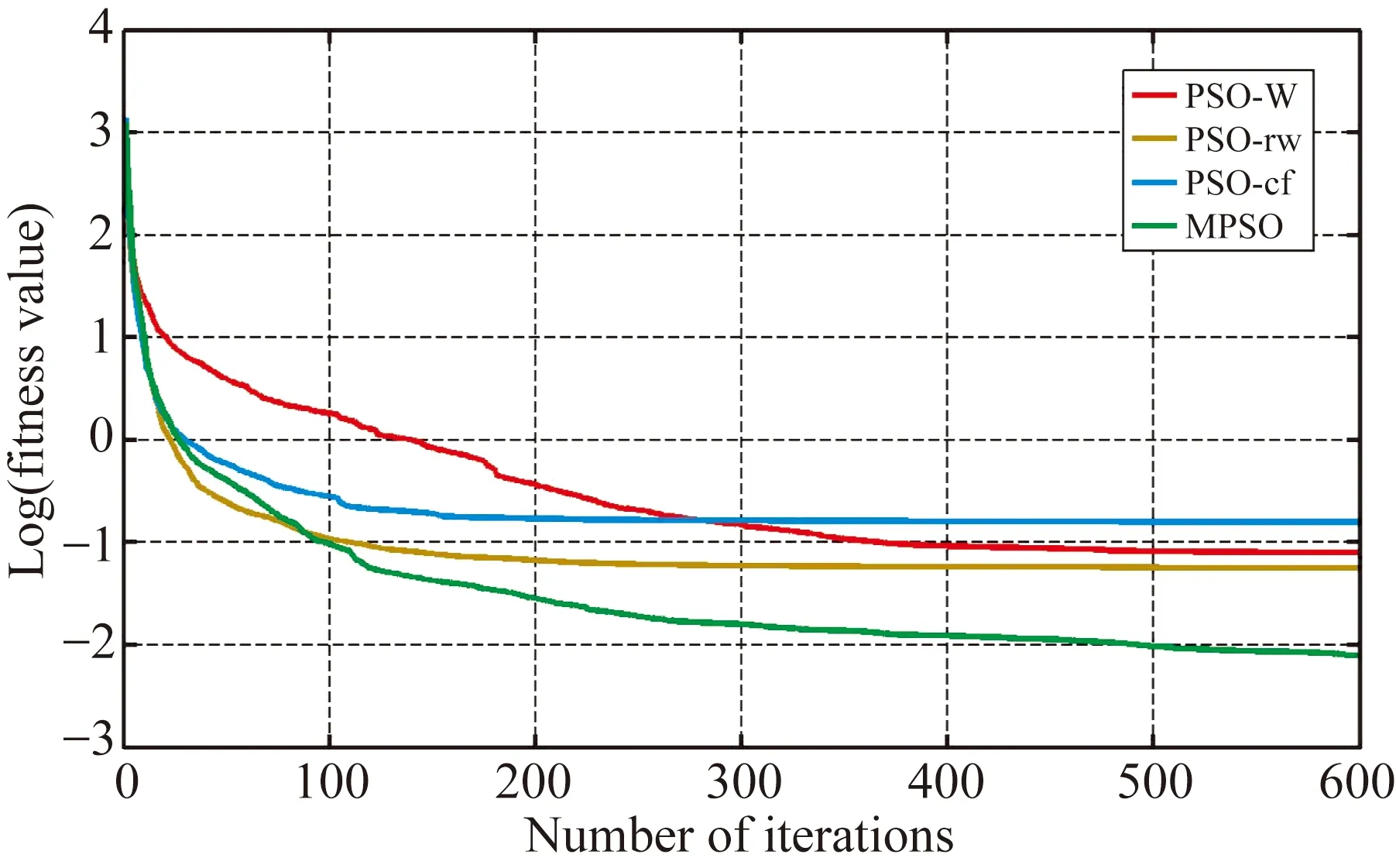
圖4 在不同粒子群算法下的辨識結果對比
統計結果發現,改進的粒子群算法具有更為平衡的全局尋優與局部尋優能力,能夠達到獲得更為優異的位置向量。
3.2.4辨識結果
優化后的權值如表1所示。
優化權值后改進PI模型與實驗測得的數據對比如圖5所示,誤差如圖6所示。反映出改進粒子群優化算法可以準確辨識各算子的權值,使PI模型輸出的數據與實驗數據之間的最大誤差相差不超過1.5%,而基于STOP算子的改進PI模型能夠非常準確的描述壓電陶瓷預期位移與所需要的控制電壓之間的關系。
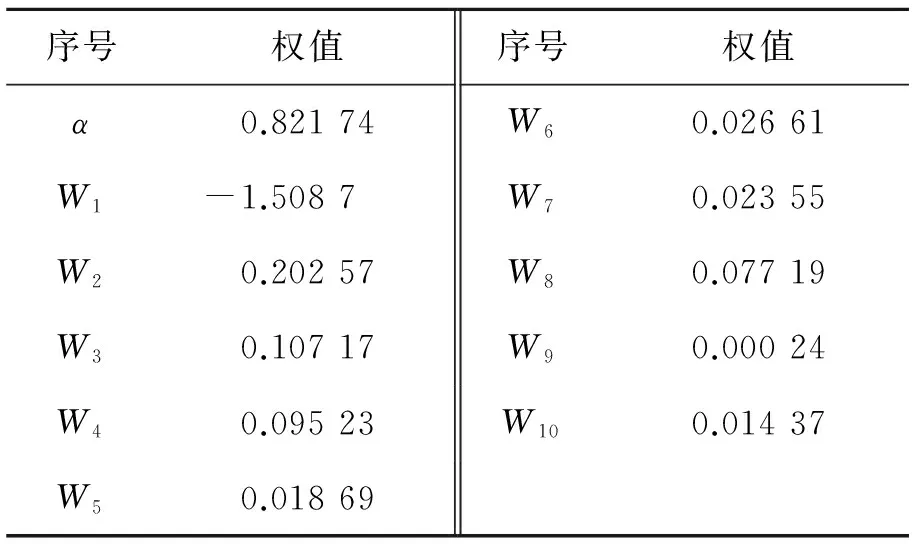
表1 辨識的改進PI模型中的權值
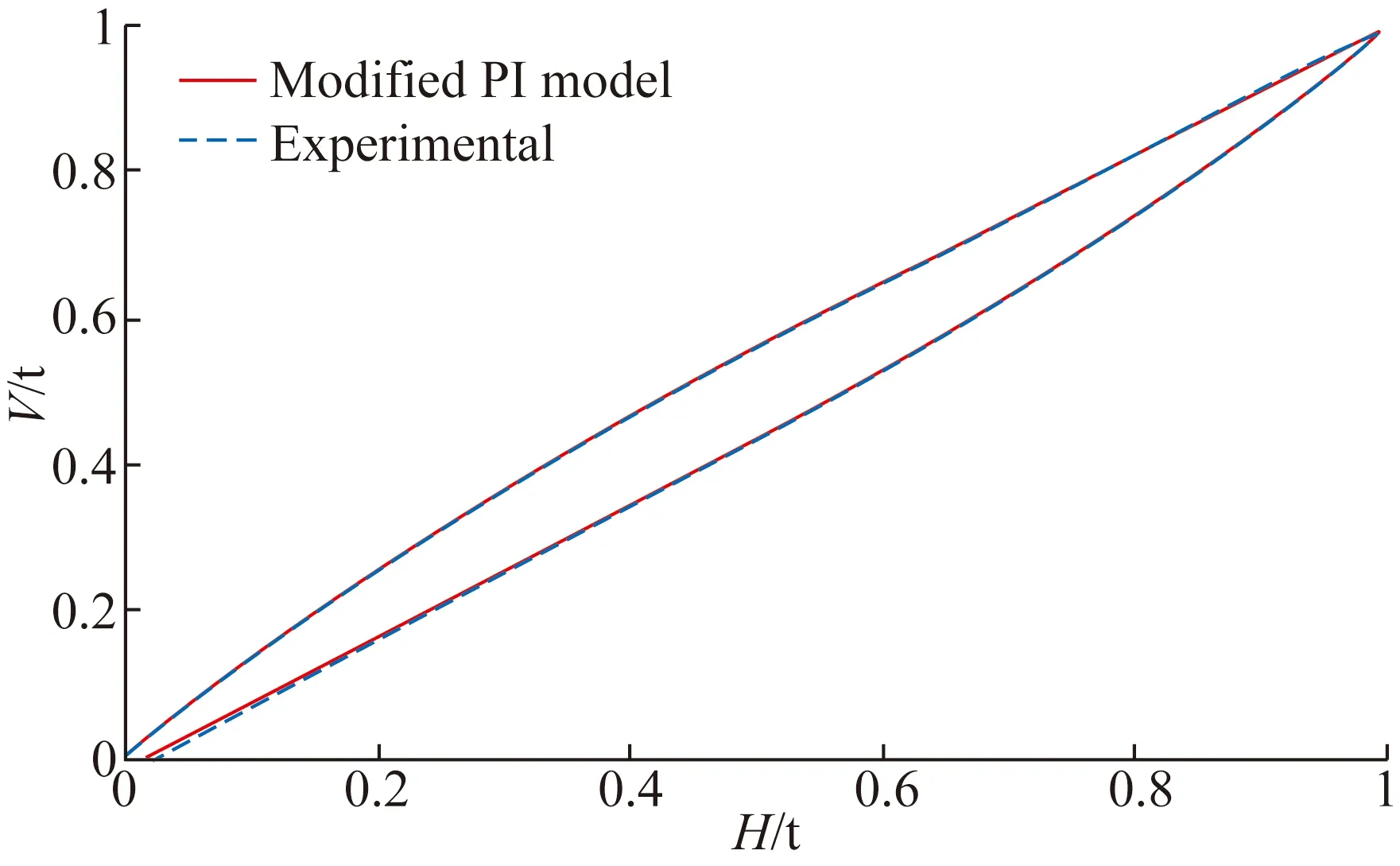
圖5改進PI模型與實驗數據對比
Fig.5Compare of modified PI model and experiment
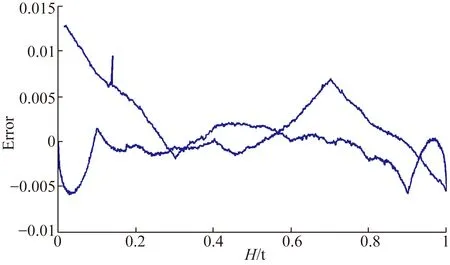
圖6 改進PI模型與實驗數據的誤差
4 實驗測試
為了測試改進PI模型作為壓電陶瓷遲滯非線性前饋補償器的效果,利用圖2中實驗儀器進行測試實驗。實驗流程如圖7所示,在計算機中輸入預期位移,通過C語言編寫改進PI模型程序從而獲得所需要的控制電壓,PI E-500控制器通過PIMicromove軟件將控制電壓施加給壓電陶瓷,最后通過電感測微儀檢測壓電陶瓷的實際位移輸出,并與預期輸入位移作對比。
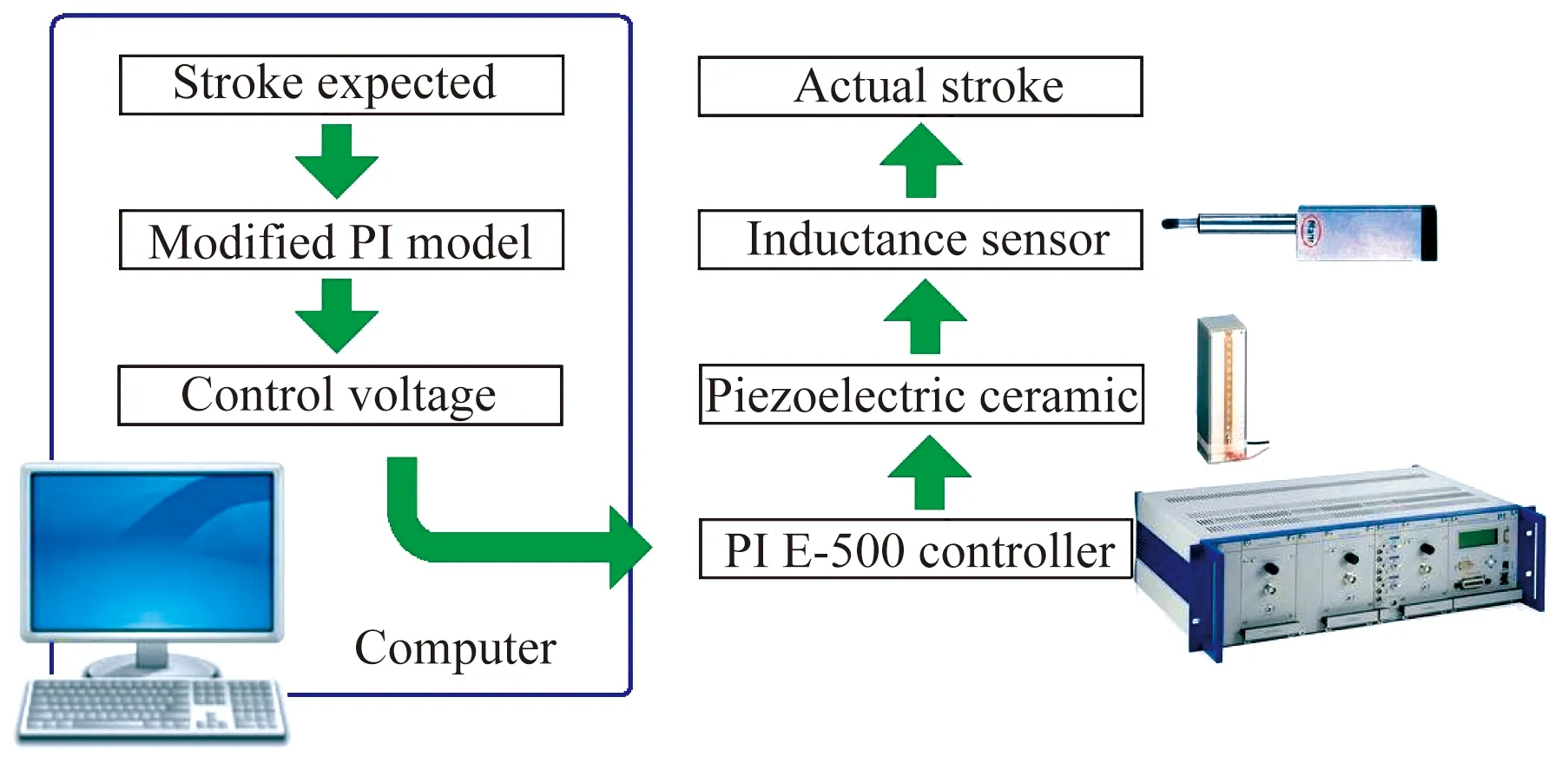
圖7 實驗流程
第一組測試:輸入一組幅值遞減的三角波形預期位移,實際輸出位移與預期位移的對比結果如圖8所示,誤差如圖9所示。
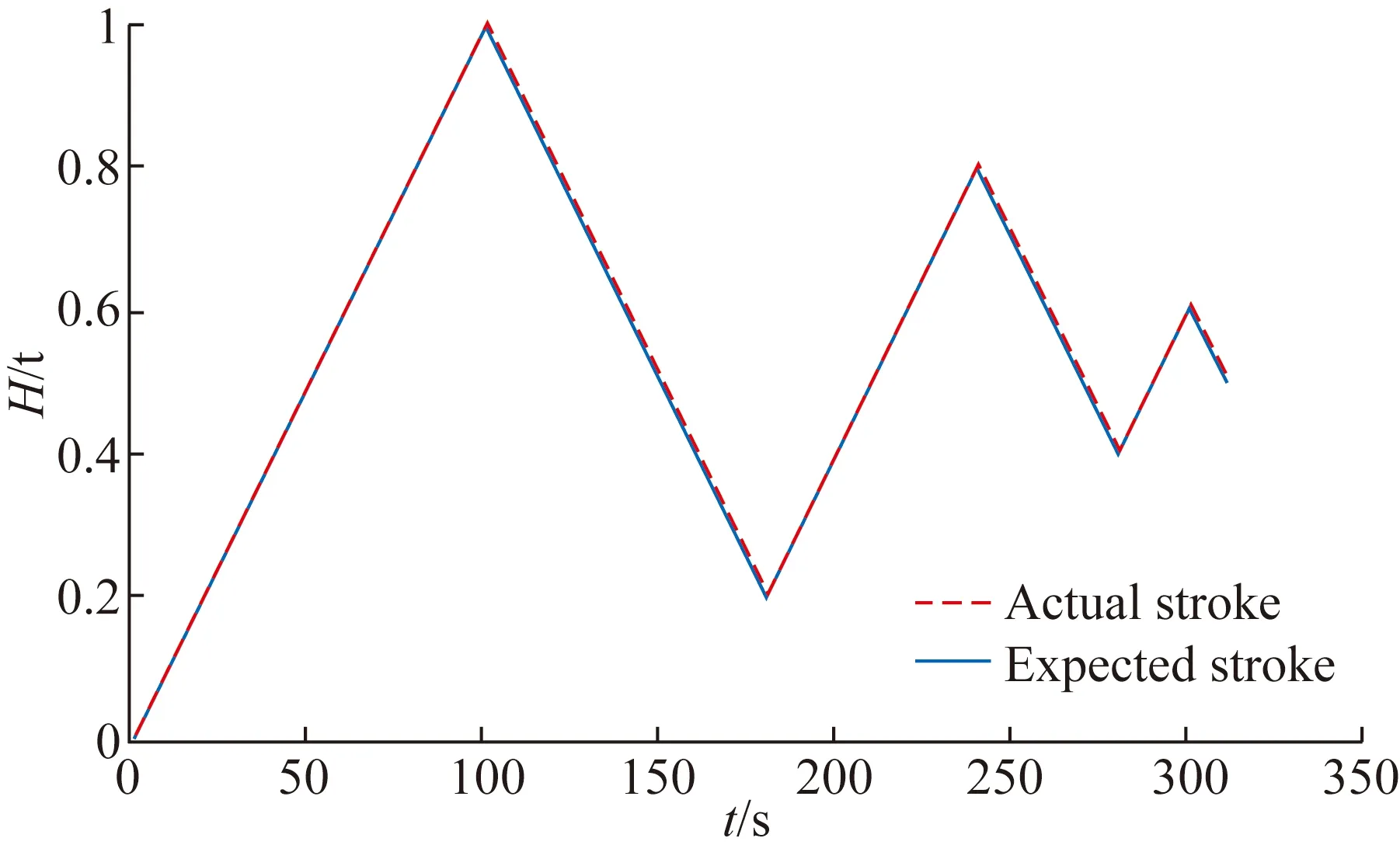
圖8 幅值遞減三角波形預期位移與實際位移對比

圖9 幅值遞減三角波形預期位移與實際位移誤差
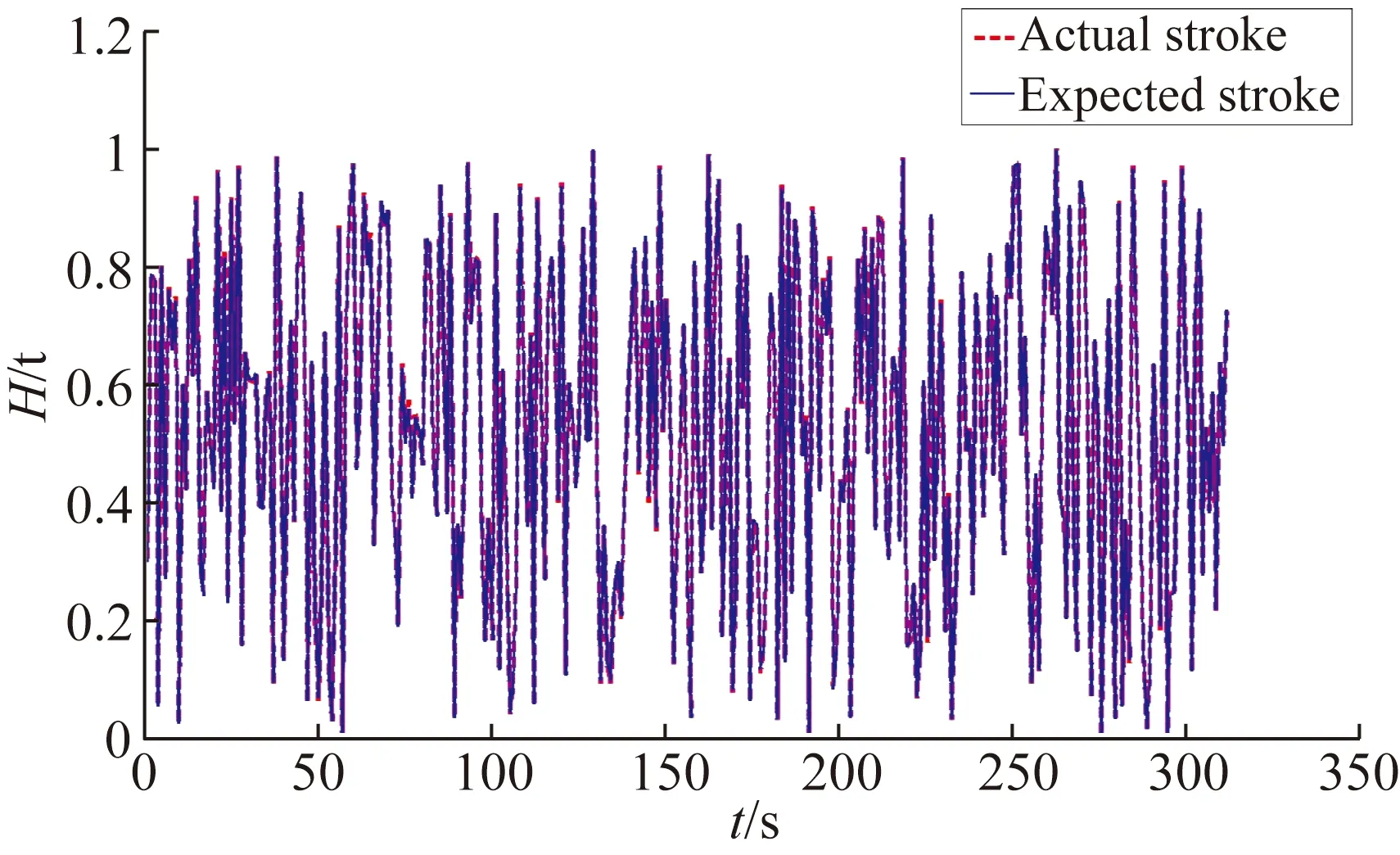
圖10 隨機波形預期位移與實際位移對比
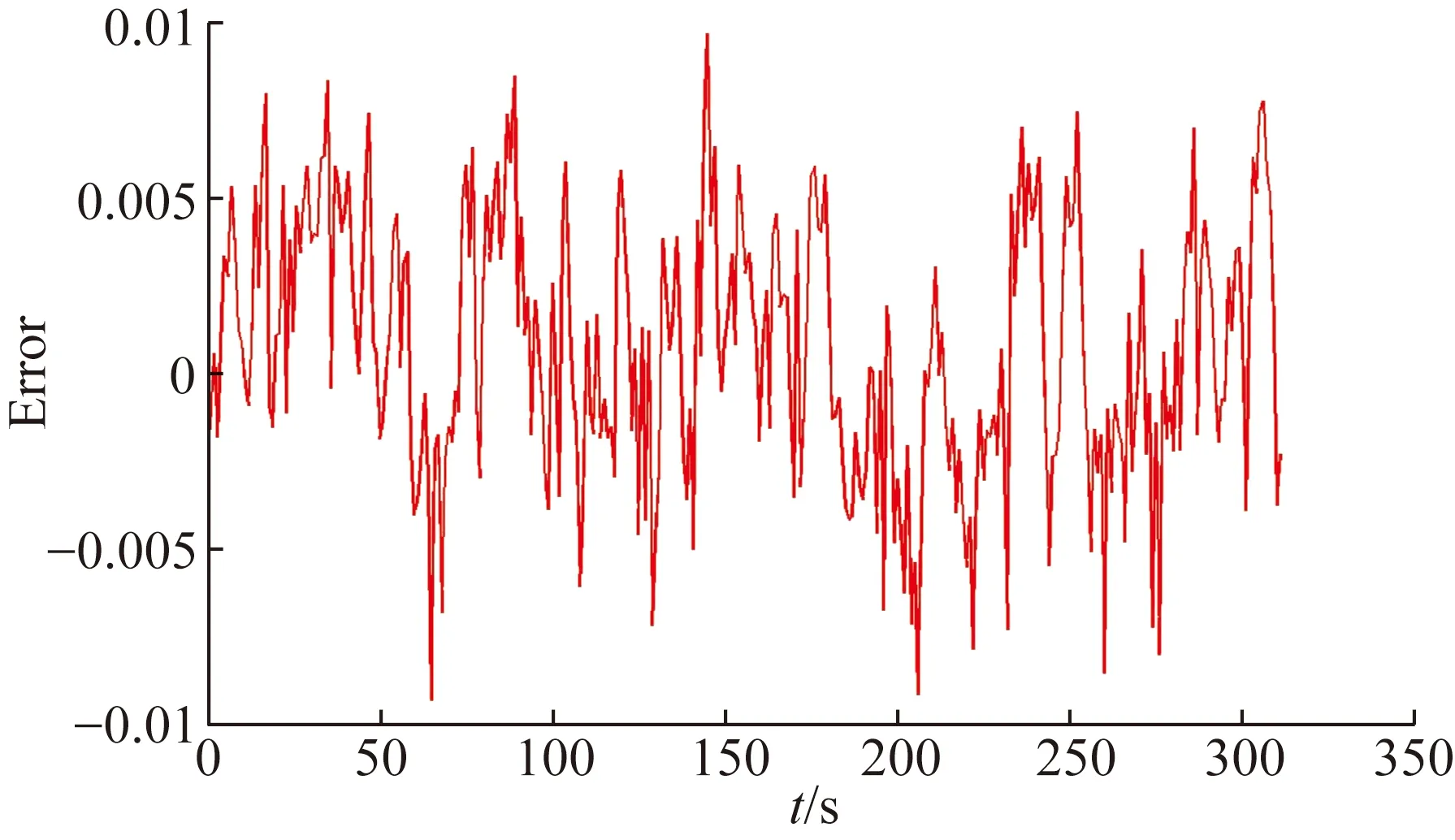
圖11 隨機波形預期位移與實際位移誤差
第二組測試:輸入一組隨機的預期位移,實際輸出位移與預期位移的對比結果如圖10所示,誤差如圖11所示。可以發現基于STOP算子的改進PI模型能夠很好的補償壓電陶瓷的遲滯非線性,實際輸出位移與預期輸入位移之間的誤差較小,基本控制在1%以內。
5 結 論
本文提出的基于STOP算子的改進PI模型可以較好補償壓電陶瓷的遲滯非線性,通過遲滯補償,壓電陶瓷的輸出可以跟蹤規律變化或是隨機變化的預期輸入,誤差基本控制在1%以內。說明基于STOP算子的改進PI模型是可行的,此外它形式簡單、補償精度高,與以往的基于PLAY算子的PI模型相比,可以避免復雜的解析求逆模型過程,同時在工程中也避免通過插值算法求逆模型而浪費大量時間,因此基于STOP算子的改進PI模型具有很好的工程實用價值。此外本文提出的改進粒子群優化算法,可以更好地平衡全局尋優能力與局部尋優能力。與其它經典粒子群優化算法對比,改進算法可以獲得更優異的位置向量,即可以更準確辨識PI模型中的結構參數。
[1]LI W, CHEN X D. Compensation of hysteresis in piezoelectric actuators without dynamics modeling [J].SensorsandActuatorsA:Physical, 2013,199:89-97.
[2]YANG G, WANG D H, LI SH D. Single piezoelectric ceramic stack actuator based fast steering mirror with fixed rotation axis and large excursion angle [J].SensorsandActuatorsA:Physical, 2015,235:292-299.
[3]ZHU W, BIAN L X, AN Y,etal.. Modeling and control of a two-axis fast steering mirror with piezoelectric stack actuators for laser beam tracking [J].SmartStructureandMaterials, 2015,24:075014.
[4]QI K Q, YANG X, CHAO F,etal.. Analysis of the displacement amplification ratio of bridge-type mechanism [J].MechanismandMachineTheory, 2015,87:45-56.
[5]崔玉國,朱耀祥,婁軍強,等. 壓電微夾持鉗鉗指位移與夾持力的檢測[J]. 光學 精密工程, 2015, 23(5):1372-1379.
CUI Y G, ZHU Y X, LOU J Q,etal.. Detection of finger displacement and gripping force of piezoelectric micro-gripper [J].Opt.PrecisionEng., 2015, 23(5):1372-1379.(in Chinese)
[6]RU CH H, CHEN L G, SHAO B,etal.. A hysteresis compensation method of piezoelectric actuator: Model, identification and control [J].ControlEngineeringPractice, 2009,17:1107-1114.
[7]ZIRKA S E, MOROZ Y I, MARKETOS P,etal..Dynamic hysteresis modeling [J].ScienceDirect:PhysicaB, 2004,343:90-95.
[8]GAUL L, BECKER J. Model-based piezoelectric hysteresis and creep compensation for highly-dynamic feedforward rest-to-rest motion control of piezoelectrically actuated flexible structures [J].InternationalJournalofEngineeringScience, 2009,47:1193-1207.
[9]XIAO SH L, LI Y M. Dynamic compensation andH∞ control for piezoelectric actuators based on the inverse Bouc-Wen model [J].RoboticsandComputer-IntegratedManufacturing, 2014,30:47-54.
[10]袁剛,張小波,王代華,等. 壓電式快速反射鏡的遲滯特性及線性化[J]. 光學 精密工程, 2015, 23(6): 1650-1656.
YUANG G, ZHANG X B, WANG D H,etal..Hysteresis and linearization of piezoelectric fast steering mirror [J].Opt.PrecisionEng., 2015, 23(6): 1650-1656.(in Chinese)
[11]BAHADUR I M, MILLS J K. A new model of hysteresis of piezoelectric actuators [C].Proceedingsofthe2011IEEEInternationalConferenceonMechatronicsandAutomation. August 7-10, Beijing, China.
[12]MACHI J W, NISTRI P, ZECCA P. Mathematical models for hysteresis [J].SIAWReview. 35(1993)94-123.
[13]MARTIN B. Some mathematical properties of the preisach model for hysteresis [J].TranscationsonMagnetics. 25(4)1989.
[14]LIU S N, SU CH Y. A modified generalized Prandtl-Ishlinskii model and its inverse for hysteresis compensation [C]. 2013AmericanControlConference, Washington, 2013:17-19.
[15]吳伊玲,劉廷霞,張振東,等. 基于PI遲滯模型的壓電陶瓷復合控制算法研究[J]. 壓電與聲光, 2015,37(6):950-953.WU Y L, LIU T X, ZHANG ZH D,etal.. Research on compound control arithmetic ofpiezoelectric ceramic based on PI model [J].Piezoelectrics&Acoustooptics, 2015, 37(6): 950-953.(in Chinese)
[16]JANAIDEH M A, RAKHEJA S, SU CH Y. Experimental characterization and modeling of rate-dependent hysteresis of a piezoceramic actuator [J].Mechatronics, 2009,10:656-670.
[17]BASU M. Modified particle swarm optimization for nonconvex economic dispatch problems [J].ElectricalPowerandEnergySystems,2015,69:304-312.
[18]MU A, CAO D, WANG X H. A modified particle swarm optimization algorithm [J].NaturalScience, 2009,2(1):151-155.
[19]YANG M J, GU G Y, ZHU L M. Parameter identification of the generalized Prandtl-Ishlinskii model for piezoelectric actuators using modified particle swarm optimization [J].SensorsandActuatorsA:Physics, 2013, 189: 254-265.

方楚(1990-),男,內蒙古赤峰人,博士研究生,2012年于上海交通大學獲得學士學位,主要從事光學精密儀器的設計與研究。E-mail:cfang1990@hotmail.com

郭勁(1964-),男,吉林長春人,博士,研究員,博士生導師,2007年于中科院長春光機所獲得博士學位,主要從事激光與物質相互作用技術研究。E-mail:guojin1964@126.com
(版權所有未經許可不得轉載)
Compensating controller for hysteresis nonlinerity of piezoelectric ceramics
FANG Chu1,2, GUO Jin1, XU Xin-xing1, JIANG Zhen-hua1, WANG Ting-feng1
(1.StateKeyLaboratoryofLaserInteractionwithMatter,ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofScience,Changchun130033,China;2.UniversityofChineseAcademyofScience,Beijing100049,China)*Correspondingauthor,E-mail:guojin1964@126.com
To effectively compensate the hysteresis nonlinearity of piezoelectric ceramics, a modified PI model based on STOP operator was proposed to avoid the complex processing in solving inverse model and time consuming in interpolating method of the traditional PI model based on PLAY operator. Firstly, traditional PI models based on PLAY operator or STOP operator were introduced. Then, modified PI model based on STOP operator was established by taking an expecting displacement as the input and a control voltage as the output, and the model was used as a feedback controller to compensate the hysteresis effect of piezoelectric ceramics. To balance the ability of local optimization and global optimization, the particle swarm optimization algorithm was improved to identify the weights of operators with different thresholds. Finally, the modified PI model was used to verify experimentally the compensating effects for the hysteresis nonlinearity. Two groups of experiments were carried out, and the results show that the hysteresis has been compensated well by modified PI model with the error no more than 1% no matter the input is continuous or random. It concludes that, the modified PI model based on STOP operator is of great value in the field of piezoelectric ceramic control.
piezoelectric ceramic; hysteresis nonlinearity; feedback controller; PI model; STOP operator
2015-12-07;
2016-02-03.
長春市科技計劃資助項目(No.2013270)
1004-924X(2016)09-2217-07
TN384;TP273
A
10.3788/OPE.20162409.2217
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
