基于PLC的2-DOF并聯機械手控制系統設計
2016-11-03 11:08:54楊惠忠卿兆波
制造業自動化 2016年10期
關鍵詞:設計
張 帥,楊惠忠,卿兆波
(中國計量大學 機電工程學院,杭州 310018)
基于PLC的2-DOF并聯機械手控制系統設計
張 帥,楊惠忠,卿兆波
(中國計量大學 機電工程學院,杭州 310018)
介紹了2-DOF并聯機械手的主要結構以及功能,通過對該裝置結構與工作原理的分析,構建了以安川運動控制器MP2300S和北爾人機界面為核心的控制系統,開發了控制系統的應用軟件。通過MPE720.V7編程軟件完成了運動程序的編寫、伺服驅動器的配置、仿真以及監控等功能。經過對該系統的調試運行,驗證了系統設計的正確性和穩定性,并且能夠高效的控制,具有廣泛的應用前景。
并聯機械手;觸摸屏;PLC;伺服系統
0 引言
隨著中國科技的飛速發展以及現代制造業、工業自動化諸多行業的需求,機械手在醫藥、電子產品和食品等輕工業領域的搬運、分揀、上下料等作業得到廣泛的應用[1,2]。與傳統的串聯機械手相比,并聯機械手具有精度高無累積誤差、剛性好、承載能力強、各向同性好以及動力學特性好等特點,故在研究和應用中作為主要對象。
機械手的控制系統有很多的設計方案。例如采用單片機+上位機的控制結構,上位機+NI運動控制卡等控制體系[3]。在本文中,介紹一種以Yaskawa的MP2300S運動控制器、伺服驅動器SGD7S-5R5A10A002、遠程I/ O模塊為硬件,通過Mechatrolink-Ⅱ實現快速、穩定、高效的運動控制系統。
1 2-DOF并聯機械手簡介
如圖1所示為2-DOF并聯機械手結構。該裝置主要有靜平臺、動平臺、主動臂、從動臂構成。通過安裝在靜平臺上的伺服電機驅動主動臂,帶著從動臂動作,最終實現動平臺的移動。

圖1 并聯機器人
2 控制系統
2.1系統硬件設計
運動控制器作為控制系統的核心,在選型時根據具體的控制要求選擇一款性價比高的控制器。在本系統中,MP2300S基本模塊是將電源/CPU、內置SVB、I/O一體化的多合一構造的模塊,兼有運動控制功能和順序控制功能。該控制器支持機械控制所需要的轉矩控制、速度控制以及位置控制外,也實現了精度要求極高的同步相位控制的4種模式切換控制,這樣可以滿足機械手復雜的機械動作;能夠實現軌跡運動中所需要的直線插補、圓弧插補、螺旋插補等功能;通過總線MECHATROLINK-Ⅱ與伺服驅動器進行完全同步控制;程序的順控與運動控制在1個掃描周期內便能夠完成從發送氣動信號到啟動運動控制的操作,最大限度的利用其高速性,縮短了產距。
伺服電機的選型,根據負載的轉矩、轉動慣量、機械運動的分辨率、編碼器、是否制動等選擇合適的伺服電機。機械手具有高速、低負載等運動特點,因此本系統中選擇Yaskawa的中慣量、高速的旋轉型電機SGM7J-08A7C6E和配套的單軸伺服驅動器單元SGD7S-5R5A10A002。該伺服驅動器具有高速、高頻度、高定位精度的特點,能夠在最短時間內最大限度的發揮極其性能,有利于實現機械手的高速運動。
開關電源的選擇,MP2300S運動控制器是24V直流電源供電,開關電源的輸出電壓根據控制器的輸入電壓選擇,輸出電流是控制額定電壓的1.6倍,因此采用規格為24DVC/100W的明緯NES-100-24V開關電源。
人機界面的選擇,為了在工作過程中實時監測機械手的工作狀態、報警狀態以及設置參數選用一款與MP2300S控制器兼容的北爾7寸顯示屏IX T7F-2。該人機界面通過以太網與運動控制器組網實現了數據的傳送傳送,縮短了傳送周期。系統的控制網絡結構圖如圖2所示,供電電路如圖3所示。
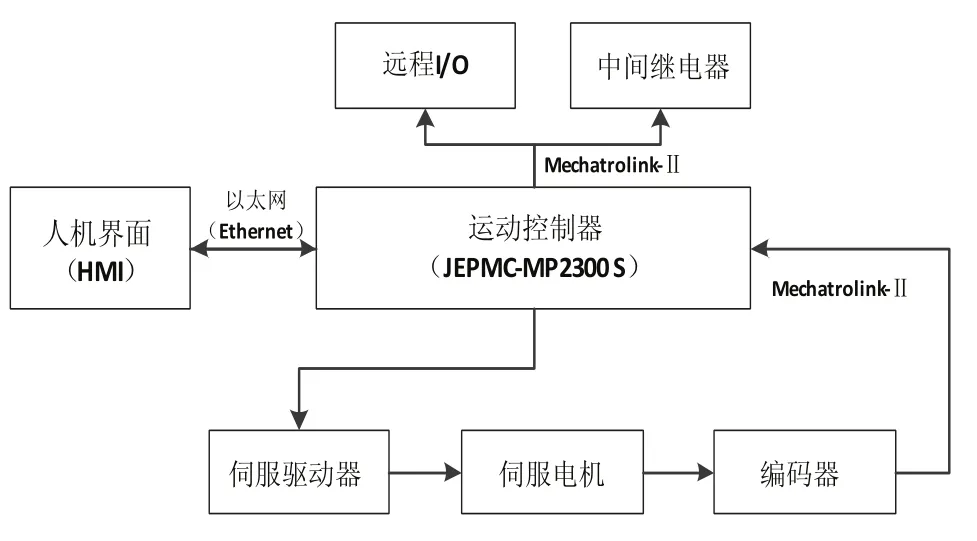
圖2 系統控制網絡結構

圖3 供電電路
2.2系統軟件設計
系統軟件作為控制的核心,程序結構的合理設計以及嚴謹的邏輯會直接影響到整個機構的穩定、控制的精度、以及人為操作的便利。控制軟件的主程序流程圖如圖4所示。
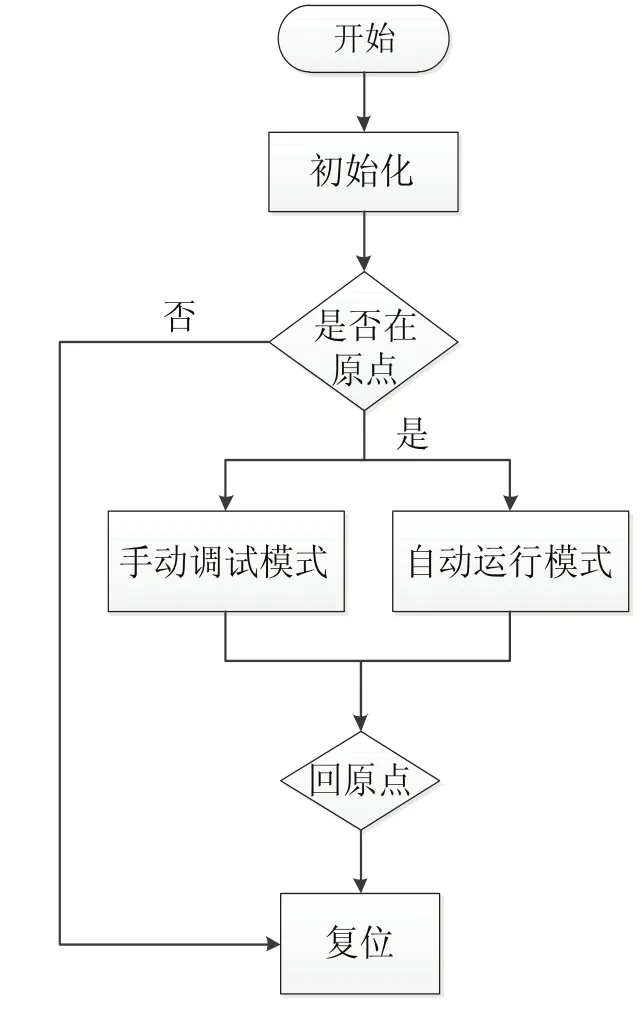
圖4 主程序流程圖
軟件系統的設計根據結構、功能的不同將分為參數設置、數據處理、控制輸出、控制輸入、HMI通信、復位、故障報警7大模塊,軟件結構圖如圖5所示。

圖5 軟件結構圖
該運動控制軟件在掃描周期上分為高速掃描(High-Speed)和低速掃描模塊(Low-Speed),高速掃描周期通常為0.02s,低速掃描周期為高速掃描周期的2倍以上。在本運動控制系統中,兩個單獨的電機軸作為基本控制對象。在MPE720 Ver7.0工程中完成伺服控制軸的設置、通訊參數的配置、虛擬軸的建立如圖6所示。

圖6 伺服運動軸設置
2.2.1運動學求解
機械手能夠準確地作業,分析結構的運動學模型尤為重要。圖7為2-DOF并聯機械手機構坐標模型,機械手的運動學求解通過Pro/E三維實體建模、AutoCAD二位建模、MATLAB數學建模進行分析。

圖7 機構坐標系
位置逆解[4]:

將上式求解為:

消去φi得:

公式進一步整理得:
其中:

位置正解:

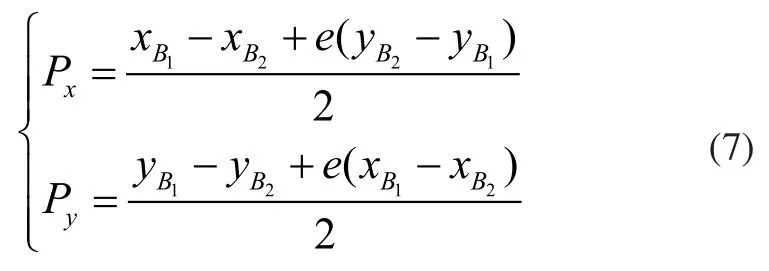
其中:

速度求解:


加速度求解:

其中:
2.2.2軌跡規劃算法模型
為了減少機械手運動過程中的機械抖動,避免對機械結構的沖擊使運動更加平緩,需要對機械手末端運動的起始、終止點進行加速度的約束,故在本系統中采用五次多項式進行運動軌跡規劃[5]。
起始時刻(t0),結束時刻(tf)代入式(10)得到6個約束方程:
對式(11)求解得:

2.2.3手動調試模式
在手動模式下,電機軸單獨控制,本系統采用定位模式控制與轉矩控制模式相互切換控制。在該模式下,便于機械手的調試與維修。為了在生產中安全可靠地運行,機械手需要進行復位操作;如果沒有進行復位操作直接切換到自動模式,機械手會根據編碼器的反饋進行檢測是否在初始狀態,如果在初始狀態,機械手即刻進入自動運行模式,否則自動復歸到原點后切換到自動運行模式。
2.2.4自動運行模式
當啟動機械手并且進入自動運行模式后,在執行過程中,路徑生成器利用軌跡規劃的計算結果更新數據,使機械手根據預先設定的軌跡,追蹤路徑。當一個周期結束后,機械手自動回到原點狀態,等待下一個指令;并且可以設置運行周期,使機械手循環操作。
2.2.5復位模式
按下復位按鈕后,動平臺復歸到機械的原點狀態,伺服電機軸處于等待狀態。復位操作,可以清除運行過程中產生的警告信息、報警信息。當機械手在復歸運行過程中,其他模式處于鎖定狀態,并且狀態指示燈處于黃燈頻閃狀態,當運行結束后,狀態指示燈處于常亮模式。
其中J:

圖8 HMI組態結構圖
2.3人機界面設計
觸摸屏用來機械手的監視控制。控制系統的人機界面采用北爾電子的7寸IX T7F-2顯示屏,在IX Developer2.10的組態軟件上對界面進行設計,界面上設計了用戶登錄、手動控制、自動控制、故障報警和系統參數5個主要界面,圖8為HMI畫面結構圖,圖9為手動控制界面。

圖9 手動控制界面
3 結束語
在電子、食品、醫療等行業,并聯機械手作為高速、輕載機器人有著廣泛的應用前景。本文中采用了Yaskawa的MP2300S運動控制器實現兩軸聯動控制作了深入研究,通過Sigma win+對電機軸的跟蹤監測達到控制要求,驗證了控制功能。該控制系統的設計,提高了自動化水平,同時大大提高了生產效率,改善了人工的勞動務件。
[1] 梅江平,王攀峰,倪雁冰.二平動自由度高速并聯機械手位置控制[J].組合機床與自動化加工技術,2004,(4):7-8,10.
[2] 李占賢,黃田,梅江平.二平動自由度高速輕型并聯機械手控制技術研究[J].機器人,2004,26(1):63-068.
[3] 唐和業.一種兩自由度并聯機械手教學演示平臺數控系統的研究與開發[D].天津:2007,1.
[4] 李艷.二自由度冗余驅動并聯機器人的動力學建模及控制研究[D].濟南:山東大學,2010.
[5] 贠超等譯.機器人學導論[M].北京:機械工業出版社,2015,163-173.
Design of 2 - DOF parallel manipulator control system based on PLC
ZHANG Shuai, YANG Hui-zhong, QING Zhao-bo
TP273
A
1009-0134(2016)10-0100-05
2016-06-21
張帥(1991 -),男,山西汾陽人,碩士研究生,研究方向為裝備制造與控制工程。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04