預(yù)設(shè)性能控制研究進(jìn)展
2016-11-10 07:50:52胡云安耿寶亮
海軍航空大學(xué)學(xué)報(bào) 2016年1期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
胡云安,張 雷,耿寶亮
(海軍航空工程學(xué)院控制工程系,山東煙臺(tái)264001)
預(yù)設(shè)性能控制研究進(jìn)展
胡云安,張雷,耿寶亮
(海軍航空工程學(xué)院控制工程系,山東煙臺(tái)264001)
介紹了預(yù)設(shè)性能控制的發(fā)展歷程及研究現(xiàn)狀,以具有一般形式的單輸入單輸出嚴(yán)格反饋非線性系統(tǒng)為例,闡述了性能函數(shù)和誤差變換的概念,分析了預(yù)設(shè)性能控制的基本原理。通過(guò)其應(yīng)用實(shí)例說(shuō)明,預(yù)設(shè)性能控制能夠解決工業(yè)生產(chǎn)、飛行器控制中的一些關(guān)鍵技術(shù)問(wèn)題,因而有必要對(duì)預(yù)設(shè)性能控制方法進(jìn)行深入研究。
預(yù)設(shè)性能控制;性能函數(shù);誤差變換
目前,非線性控制領(lǐng)域的研究成果均側(cè)重于滿足系統(tǒng)的穩(wěn)態(tài)性能,而對(duì)系統(tǒng)的瞬態(tài)性能(包括超調(diào)量和收斂速度)則關(guān)注較少。然而,隨著科技發(fā)展的日新月異,控制對(duì)象結(jié)構(gòu)越來(lái)越復(fù)雜,而且要求精度高、實(shí)時(shí)性強(qiáng),現(xiàn)有控制方法在提高控制性能方面的研究還相對(duì)比較匱乏,正是在此背景之下,預(yù)設(shè)性能控制應(yīng)運(yùn)而生,為解決性能控制問(wèn)題提供了一種新的視角和研究思路,引起了控制界的廣泛關(guān)注。預(yù)設(shè)性能控制[1]是希臘Bechlioulis等學(xué)者于2008年首次提出的一種新的控制方法。所謂預(yù)設(shè)性能是指在保證跟蹤誤差收斂到一個(gè)預(yù)先設(shè)定的任意小的區(qū)域的同時(shí),保證收斂速度及超調(diào)量滿足預(yù)先設(shè)定的條件,它要求瞬態(tài)性能和穩(wěn)態(tài)性能的同時(shí)滿足,直接以提高系統(tǒng)性能為目標(biāo)。對(duì)于系統(tǒng)的控制性能問(wèn)題,Miller[2]早在1991年就針對(duì)一類線性系統(tǒng)設(shè)計(jì)了具有非減動(dòng)態(tài)增益的分段常值切換方法,保證跟蹤誤差在規(guī)定時(shí)間內(nèi)收斂到預(yù)定的值。隨后,Ryan等人針對(duì)一類非線性系統(tǒng)討論了控制性能問(wèn)題[3],控制目標(biāo)為:①跟蹤誤差收斂到一個(gè)半徑為設(shè)定常值的區(qū)域內(nèi);②系統(tǒng)動(dòng)態(tài)曲線在一個(gè)預(yù)先設(shè)定的性能通道內(nèi)運(yùn)行,這與預(yù)設(shè)性能控制的目標(biāo)非常相似。
本文在已有文獻(xiàn)的基礎(chǔ)上分析了預(yù)設(shè)性能控制的基本原理,介紹了預(yù)設(shè)性能控制的理論和應(yīng)用研究進(jìn)展,通過(guò)其應(yīng)用實(shí)例說(shuō)明預(yù)設(shè)性能控制具有重要的研究意義。
1 預(yù)設(shè)性能控制基本原理
無(wú)論是單輸入單輸出非線性系統(tǒng),還是多輸入多輸出非線性系統(tǒng),預(yù)設(shè)性能控制都是圍繞性能函數(shù)和誤差變換這2個(gè)基本環(huán)節(jié)展開(kāi)構(gòu)建等效模型,再對(duì)等效模型進(jìn)行控制器設(shè)計(jì)。下面,以具有一般形式的單輸入單輸出嚴(yán)格反饋非線性系統(tǒng)為例,引入性能函數(shù)和誤差變換的概念,闡述預(yù)設(shè)性能控制的基本原理。
1.1系統(tǒng)描述
考慮具有一般形式的嚴(yán)格反饋非線性系統(tǒng):
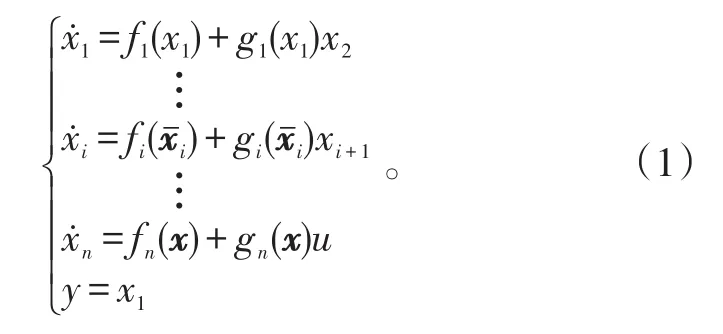
式(1)中:χ=[x1,x2,…,xn]T∈?n為系統(tǒng)的狀態(tài)量,u∈?和 y∈?分別為系統(tǒng)的輸入量和輸出量;定義i=[x1,x2,…,xi]T∈?i;fi(?)、gi(?)為已知的連續(xù)光滑函數(shù),設(shè)期望輸出為yd(t)。
控制目標(biāo)如下:
1)設(shè)計(jì)控制器u,保證輸出誤差e=y-yd滿足預(yù)先設(shè)定的瞬態(tài)和穩(wěn)態(tài)性能要求;
2)閉環(huán)系統(tǒng)中的所有信號(hào)保持有界。
1.2性能函數(shù)
通過(guò)引入性能函數(shù),對(duì)跟蹤誤差e(t)的瞬態(tài)和穩(wěn)態(tài)性能進(jìn)行設(shè)定,性能函數(shù)的定義如下。
定義1:連續(xù)函數(shù)?:?+→?+稱為性能函數(shù),如果滿足:
1)?(t)是正的且嚴(yán)格遞減;
2)limt→∞?(t)=?∞>0。
在初始誤差e(0)已知的前提下,給出如下形式的不等式約束:

式(2)中:t∈[0,∞);δ∈[0,1]。
當(dāng)不等式(2)滿足時(shí),以e(0)>0為例,則誤差曲線將被限制在?(t)和-δ?(t)所包圍的區(qū)域之中,另外,結(jié)合函數(shù)?(t)的遞減特性及δ∈[0,1]可知,誤差e(t)將在函數(shù)?(t)和-δ?(t)的共同作用下迅速收斂到0的一個(gè)小鄰域內(nèi),上述過(guò)程可借助圖1~2進(jìn)行說(shuō)明。常數(shù)?∞表示預(yù)先設(shè)定的穩(wěn)態(tài)誤差的上界,?(t)的衰減速度為跟蹤誤差e(t)收斂速度的下界,同時(shí)跟蹤誤差的最大超調(diào)不會(huì)大于δ?(0)。因此,通過(guò)選擇適當(dāng)?shù)男阅芎瘮?shù)?(t)和常數(shù)δ便可對(duì)輸出誤差的穩(wěn)態(tài)和瞬態(tài)性能進(jìn)行限制。
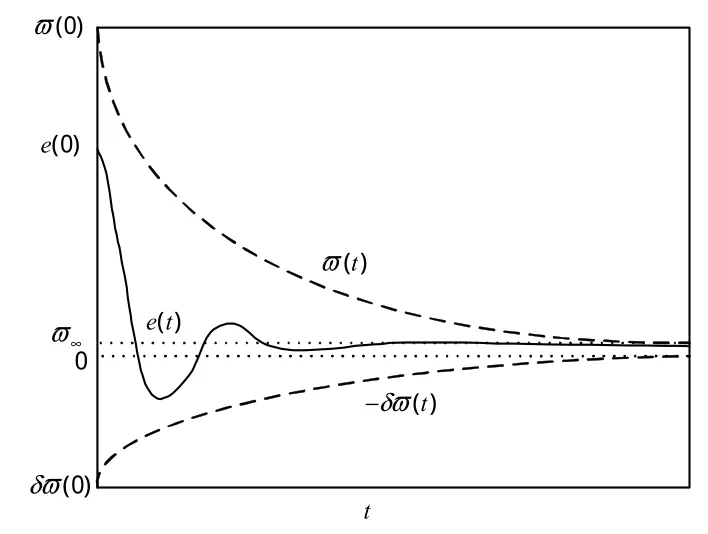
圖1 跟蹤誤差與性能函數(shù)關(guān)系示意圖(e(0)>0)Fig.1 Schematic diagram of tracking error and performance function relationship(e(0)>0)
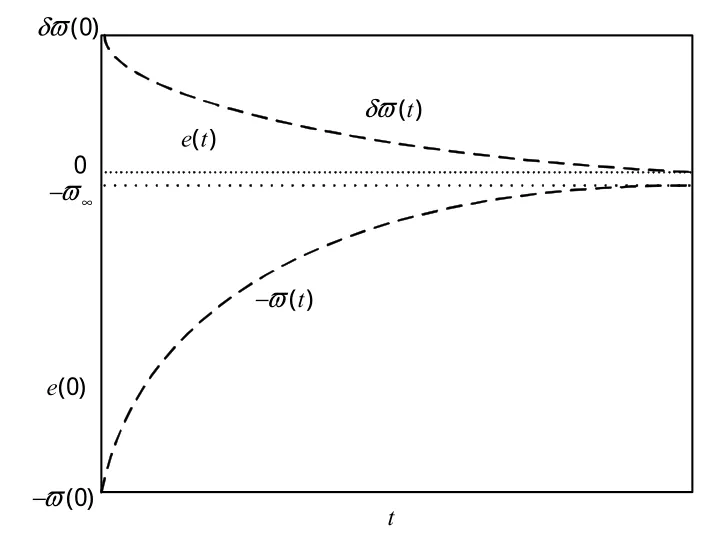
圖2 跟蹤誤差與性能函數(shù)關(guān)系示意圖(e(0)<0)Fig.2 Schematic diagram of tracking error and performance function relationship(e(0)<0)
1.3誤差變換
在控制器設(shè)計(jì)過(guò)程中,直接對(duì)不等式約束(2)進(jìn)行處理的難度非常大。因此,考慮先將不等式約束變換為等式約束,再對(duì)轉(zhuǎn)換后的等效系統(tǒng)進(jìn)行處理。定義誤差變換函數(shù) ftr(?)為

式(3)中:ε為變換誤差;ftr(ε)滿足以下條件:
ftr(ε)光滑且嚴(yán)格遞增;
由上述定義可知,當(dāng)e(0)>0時(shí),有-δ<ftr(ε)<1。
由定義1可知?(t)>0,則進(jìn)一步有-δ?(t)<?(t)ftr(ε)<?(t)
結(jié)合式(2)得到:-δ?(t)<e(t)<?(t)。同理,當(dāng)e(0)<0時(shí),有-?(t)<e(t)<δ?(t)。因此,不等式約束(2)成立。
函數(shù) ftr的逆變換為
顯然,如果能夠滿足ε(t)∈?∞(?t∈[0,∞)),則可以推出不等式約束(2)成立,進(jìn)一步可以保證跟蹤信號(hào)滿足預(yù)設(shè)性能的要求。
上述推導(dǎo)過(guò)程是在假設(shè)e(0)已知的前提下進(jìn)行的,在很多情況下,這種假設(shè)是不合理的,當(dāng)針對(duì)某些系統(tǒng)進(jìn)行控制器設(shè)計(jì)時(shí),事先往往不能得到初始誤差的精確值。為了應(yīng)對(duì)這一問(wèn)題,文獻(xiàn)[4]提出了一種不依賴于初始誤差e(0)的變參數(shù)約束方案,消除了要求初始誤差已知的限制。
1.4模型構(gòu)建
選取滿足式(2)、(3)型的性能函數(shù)和誤差變換函數(shù)進(jìn)行模型重構(gòu),對(duì)式(4)兩邊同時(shí)對(duì)時(shí)間求一階導(dǎo)數(shù),可以得到:

考慮系統(tǒng)(1),其目標(biāo)函數(shù)滿足性能函數(shù)(2),經(jīng)變換函數(shù)(3)進(jìn)行函數(shù)變換后得到系統(tǒng)(6),實(shí)現(xiàn)了將不等式約束變換為等式約束問(wèn)題,設(shè)計(jì)控制器使當(dāng)經(jīng)函數(shù)變換后的系統(tǒng)(6)穩(wěn)定時(shí),系統(tǒng)(1)穩(wěn)定且滿足預(yù)設(shè)性能要求。
2 預(yù)設(shè)性能控制研究進(jìn)展
近幾年,隨著非線性控制理論的巨大發(fā)展,越來(lái)越多的專家學(xué)者投入到預(yù)設(shè)性能控制的研究中,無(wú)論在其理論發(fā)展和應(yīng)用研究都達(dá)到了空前的程度。文獻(xiàn)[5]將預(yù)設(shè)性能控制的研究對(duì)象進(jìn)一步推廣到了多輸入多輸出反饋線性化系統(tǒng),變換后的誤差最終收斂且閉環(huán)系統(tǒng)內(nèi)所有信號(hào)有界。文獻(xiàn)[6]針對(duì)一類仿射多輸入多輸出非線性系統(tǒng),采用控制Lyapunov函數(shù)、自適應(yīng)技術(shù)完成了預(yù)設(shè)性能狀態(tài)反饋控制器設(shè)計(jì),并成功克服了在函數(shù)估計(jì)過(guò)程中可能出現(xiàn)的系統(tǒng)不可控問(wèn)題。文獻(xiàn)[7]針對(duì)具有未知非線性函數(shù)的串級(jí)系統(tǒng)完成了部分狀態(tài)反饋控制器設(shè)計(jì),保證系統(tǒng)跟蹤誤差滿足預(yù)設(shè)性能,方法結(jié)構(gòu)簡(jiǎn)單且僅需系統(tǒng)部分信息。文獻(xiàn)[8-10]針對(duì)一類僅輸出可測(cè)的非仿射非線性系統(tǒng),完成了輸出反饋控制器設(shè)計(jì),保證系統(tǒng)的穩(wěn)態(tài)和瞬態(tài)性能滿足預(yù)設(shè)設(shè)定的要求,系統(tǒng)中的不確定項(xiàng)利用神經(jīng)網(wǎng)絡(luò)進(jìn)行逼近,控制器設(shè)計(jì)采用了切換函數(shù)的形式。文獻(xiàn)[11]在預(yù)設(shè)性能控制的基礎(chǔ)上構(gòu)建了一種新的方法,避免了復(fù)雜的神經(jīng)網(wǎng)路緊集選擇過(guò)程。文獻(xiàn)[12]解決了一類帶有死區(qū)的非線性系統(tǒng)的預(yù)設(shè)性能控制問(wèn)題,將死區(qū)表示為時(shí)變函數(shù)的形式,利用Nussbaum函數(shù)解決了控制增益未知的問(wèn)題,并提出了一種新的高階神經(jīng)網(wǎng)絡(luò)對(duì)未知非線性進(jìn)行逼近。文獻(xiàn)[13-15]對(duì)具有嚴(yán)格反饋形式的非線性系統(tǒng)的預(yù)設(shè)性能控制問(wèn)題進(jìn)行了討論,在一定假設(shè)的基礎(chǔ)上初步解決了該類系統(tǒng)的控制性能問(wèn)題。文獻(xiàn)[16-18]將預(yù)設(shè)性能的概念與輸出反饋相結(jié)合,提出了預(yù)設(shè)性能輸出反饋控制器的設(shè)計(jì)方法。文獻(xiàn)[19]將預(yù)設(shè)性能的概念應(yīng)用到機(jī)械臂位置跟蹤問(wèn)題中,在保證跟蹤誤差收斂到一個(gè)預(yù)先設(shè)定的任意小的區(qū)域的同時(shí),保證收斂速度及超調(diào)量滿足預(yù)先設(shè)定的條件。文獻(xiàn)[20]針對(duì)帶輸入死區(qū)、不確定項(xiàng)和擾動(dòng)的嚴(yán)格反饋非線性系統(tǒng)設(shè)計(jì)了一種連續(xù)的、低復(fù)雜度的靜態(tài)狀態(tài)反饋預(yù)設(shè)性能控制器,摒棄了神經(jīng)網(wǎng)絡(luò)和模糊系統(tǒng)的引入,避免了反演控制方法存在“計(jì)算膨脹”問(wèn)題,設(shè)計(jì)簡(jiǎn)單,為低復(fù)雜的預(yù)設(shè)性能控制器設(shè)計(jì)擴(kuò)寬了思路。文獻(xiàn)[21]針對(duì)一類包含非匹配不確定項(xiàng)、時(shí)變延遲、不可測(cè)狀態(tài)的非線性大刻度系統(tǒng)提出了自適應(yīng)模糊分散輸出反饋預(yù)設(shè)性能控制器。利用模糊邏輯近似不確定項(xiàng),利用模糊狀態(tài)觀測(cè)器估計(jì)不可測(cè)狀態(tài),利用“動(dòng)態(tài)面”設(shè)計(jì)方法克服“計(jì)算膨脹”問(wèn)題。最后,基于Lyapunov-Krasovskii理論證明系統(tǒng)閉環(huán)信號(hào)有界,跟蹤信號(hào)滿足性能要求。文獻(xiàn)[22]針對(duì)一類包含輸入飽和不可測(cè)狀態(tài)的非線性隨機(jī)系統(tǒng)提出了自適應(yīng)模糊輸出反饋預(yù)設(shè)性能控制器。利用模糊邏輯近似不確定項(xiàng),輸入飽和近似為光滑函數(shù),利用模糊狀態(tài)觀測(cè)器估計(jì)不可測(cè)狀態(tài)。文獻(xiàn)[23]針對(duì)未知純反饋系統(tǒng)進(jìn)行普遍的、無(wú)近似狀態(tài)反饋控制器設(shè)計(jì),使在任何初始系統(tǒng)條件下,輸出跟蹤誤差能滿足預(yù)設(shè)性能且閉環(huán)系統(tǒng)全局收斂且有界。文獻(xiàn)[24]針對(duì)內(nèi)部關(guān)聯(lián)的時(shí)滯系統(tǒng)設(shè)計(jì)輸出反饋預(yù)設(shè)性能控制器,設(shè)計(jì)降階觀測(cè)器取代傳統(tǒng)觀測(cè)器在線估計(jì)不可測(cè)狀態(tài),提出新型的誤差變換函數(shù),利用反演控制方法進(jìn)行設(shè)計(jì)。文獻(xiàn)[25]針對(duì)單輸入單輸出非線性系統(tǒng)提出了一種神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)機(jī)制,用新型轉(zhuǎn)換函數(shù)將約束跟蹤問(wèn)題轉(zhuǎn)換為某系統(tǒng)的穩(wěn)定性問(wèn)題,利用RBF神經(jīng)網(wǎng)絡(luò)近似濾波跟蹤誤差,利用自適應(yīng)控制方法進(jìn)行控制器設(shè)計(jì),穩(wěn)定神經(jīng)網(wǎng)絡(luò)控制可以獲取并存儲(chǔ)未知系統(tǒng)動(dòng)態(tài)信息并用于在線控制,收斂速度快,計(jì)算負(fù)擔(dān)小。
目前,預(yù)設(shè)性能控制的理論研究和應(yīng)用主要集中在國(guó)外院校和學(xué)術(shù)團(tuán)體,雖然已經(jīng)引起了國(guó)外學(xué)者的廣泛關(guān)注,在結(jié)構(gòu)設(shè)計(jì)、穩(wěn)定性分析以及性能改善等方面都有一定的研究,但是在國(guó)內(nèi)鮮有團(tuán)隊(duì)[4,26-29]對(duì)其進(jìn)行深入研究。文獻(xiàn)[4]針對(duì)一類控制方向未知的不確定嚴(yán)格反饋非線性系統(tǒng)的預(yù)設(shè)性能自適應(yīng)神經(jīng)網(wǎng)絡(luò)反演控制問(wèn)題,提出了一種新的誤差轉(zhuǎn)化方法,放寬了對(duì)初始跟蹤誤差已知的限制,綜合運(yùn)用Nussbaum函數(shù)和反演控制技術(shù)設(shè)計(jì)了控制器。文獻(xiàn)[26]針對(duì)一類嚴(yán)格反饋非線性系統(tǒng),基于Lyapunov理論進(jìn)行backstepping控制器的設(shè)計(jì),并進(jìn)行了穩(wěn)定性分析。文獻(xiàn)[27]針對(duì)一類控制增益為未知函數(shù)的不確定嚴(yán)格反饋系統(tǒng),引入積分型Lyapunov函數(shù),避免了因控制增益未知而引起的系統(tǒng)奇異問(wèn)題,綜合運(yùn)用自適應(yīng)技術(shù)、徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)和反演控制方法完成了控制器的設(shè)計(jì),系統(tǒng)中的未知函數(shù)利用RBF神經(jīng)網(wǎng)絡(luò)直接進(jìn)行逼近。文獻(xiàn)[28]針對(duì)一類控制增益為未知常數(shù)嚴(yán)格反饋非線性系統(tǒng)的預(yù)設(shè)性能反演控制問(wèn)題進(jìn)行了研究,利用自適應(yīng)估計(jì)器實(shí)現(xiàn)了對(duì)未知控制增益的逼近,并將虛擬控制量的跟蹤問(wèn)題轉(zhuǎn)化為誤差狀態(tài)量的有界性問(wèn)題,完成了反演控制器的設(shè)計(jì)。文獻(xiàn)[29]針對(duì)一類具有外界擾動(dòng)的嚴(yán)格反饋非線性系統(tǒng),將Backstepping技術(shù)、預(yù)設(shè)性能控制和魯棒控制相結(jié)合,提出一種預(yù)設(shè)性能魯棒控制器設(shè)計(jì)方法。利用Backstepping和魯棒控制逐步遞推選擇適當(dāng)?shù)腖yapunov函數(shù)設(shè)計(jì)預(yù)設(shè)性能魯棒控制器。預(yù)設(shè)性能控制器設(shè)計(jì)方法多種多樣,有代表性的控制方法為自適應(yīng)控制方法[1-3,5-7]、輸出反饋控制法[8-10]、狀態(tài)反饋控制法[19-20]、模糊控制法[21-22]、神經(jīng)網(wǎng)絡(luò)法[4,26-27]、典型反演控制方法[28]、魯棒控制方法[29]等,這里不再逐一介紹。
3 預(yù)設(shè)性能控制應(yīng)用
在很多實(shí)際系統(tǒng)的控制過(guò)程中,對(duì)穩(wěn)態(tài)性能和瞬態(tài)性能同時(shí)提出了很高的要求,而不是僅僅保證系統(tǒng)穩(wěn)定。目前,預(yù)設(shè)性能控制已應(yīng)用到了部分實(shí)際系統(tǒng)中,改善了系統(tǒng)的控制性能。文獻(xiàn)[30-31]應(yīng)用預(yù)設(shè)性能控制解決了具有參數(shù)不確定性的機(jī)械臂模型的力/位置跟蹤控制問(wèn)題。文獻(xiàn)[32]進(jìn)一步考慮機(jī)械臂模型中存在有界擾動(dòng)的情況,利用魯棒設(shè)計(jì)技巧保證了閉環(huán)系統(tǒng)的控制性能。文獻(xiàn)[33]針對(duì)機(jī)械臂模型提出了一種不依賴于模型結(jié)構(gòu)和參數(shù)的預(yù)設(shè)性能控制器設(shè)計(jì)方法,無(wú)需機(jī)械臂的動(dòng)態(tài)模型信息和力變模型信息,取得了比較理想的控制效果。文獻(xiàn)[34-35]將預(yù)設(shè)性能的概念與PID控制相結(jié)合,完成了機(jī)器人關(guān)節(jié)的速度和位置控制,保證速度和位置誤差趨向于零的同時(shí),超調(diào)量和收斂速度也滿足了預(yù)先設(shè)定的要求。文獻(xiàn)[36-37]將文獻(xiàn)[7]的成果應(yīng)用到了機(jī)械臂的力和位置跟蹤過(guò)程中,均達(dá)到了預(yù)期的控制目標(biāo)。另外,利用預(yù)設(shè)性能控制解決機(jī)械臂的實(shí)際控制問(wèn)題還取得了許多其他成果[38-41]。文獻(xiàn)[42]針對(duì)帶非線性跳躍、線性阻尼動(dòng)態(tài)的車輛主動(dòng)懸掛系統(tǒng)設(shè)計(jì)了自適應(yīng)預(yù)設(shè)性能控制器,使懸掛震動(dòng)滿足預(yù)設(shè)要求,提高了駕乘的舒適性。通過(guò)分析預(yù)設(shè)性能控制自身的特性和目前的典型應(yīng)用可知,預(yù)設(shè)性能控制方法能夠解決工業(yè)生產(chǎn)、飛行器控制中的一些關(guān)鍵技術(shù)問(wèn)題,具有十分重要的工程實(shí)際意義[43]。
4 總結(jié)與展望
通過(guò)分析目前國(guó)內(nèi)外研究者在預(yù)設(shè)性能控制研究中所取得的成果發(fā)現(xiàn),在預(yù)設(shè)性能控制的研究領(lǐng)域中存在如下問(wèn)題急待解決。
1)預(yù)設(shè)性能控制均有不嚴(yán)謹(jǐn)和不合理之處,具體可總結(jié)為:①缺乏統(tǒng)一嚴(yán)格的穩(wěn)定性分析;②設(shè)計(jì)過(guò)程中用到了未知參數(shù)的猜測(cè)值,而這個(gè)猜測(cè)值本身是難以得到的;③控制量不夠光滑。
2)已有的絕大部分文獻(xiàn)僅針對(duì)嚴(yán)格反饋非線性系統(tǒng)和仿射非線性系統(tǒng)進(jìn)行研究,可以考慮將模型進(jìn)一步推廣到多輸入-多輸出系統(tǒng)、非仿射非線性系統(tǒng)情況,以及更具一般形式的非線性系統(tǒng),例如混沌系統(tǒng),時(shí)變非線性系統(tǒng)等。
3)進(jìn)一步拓寬應(yīng)用對(duì)象,充分利用預(yù)設(shè)性能控制的優(yōu)勢(shì)解決軍事、航空航天等眾多領(lǐng)域的難點(diǎn)控制問(wèn)題,體現(xiàn)其工程價(jià)值。
目前,非線性系統(tǒng)的預(yù)設(shè)性能控制問(wèn)題的相關(guān)研究還處于起步階段,尚未形成一套完整的理論體系,許多難點(diǎn)問(wèn)題亟待解決,隨著非線性控制理論的巨大發(fā)展,相信會(huì)有更多的國(guó)內(nèi)外學(xué)者關(guān)注和從事這個(gè)富有挑戰(zhàn)性的研究,使該領(lǐng)域的相關(guān)問(wèn)題得到進(jìn)一步的研究和解決。
[1]BECHLIOULIS C P,ROVITHAKIS G A.Prescribed performance adaptive control of SISO feedback linearizable systems with disturbances[C]//16thMediterranean Conference on Control&Automation(MED).Ajaccio,F(xiàn)rance:IEEE,2008:1035-1040.
[2]MILLER D E,DAVISON E J.An adaptive controller which provides an arbitrarily good transient and steadystate response[J].IEEE Transactions on Automatic Control,1991,36(1):68-81.
[3]RYAN E P,SANGWIN C J,TOWNSEND P.Controlled functional differential equations:approximate and exact asymptotic tracking with prescribed transient performance [J].ESAIM:Control,Optimisation&Calculus of Variations,2009,15(4):745-762.
[4]耿寶亮,胡云安.控制方向未知的不確定系統(tǒng)預(yù)設(shè)性能自適應(yīng)神經(jīng)網(wǎng)絡(luò)反演控制[J].控制理論與應(yīng)用,2014,31(3):397-403. GENG BAOLIANG,HU YUNAN.Prescribed performance adaptive neural backstepping control for nonlinear system with uncertainties and unknown control directions [J].Control Theory&Applications,2014,31(3):397-403.(in Chinese)
[5]BECHLIOULIS C P,ROVITHAKIS G A.Robust adaptive control of feedback linearizable MIMO nonlinear systems with prescribed performance[J].IEEE Transactions onAutomatic Control,2008,53(9):2090-2099.
[6]BECHLIOULIS C P,ROVITHAKIS G A.Prescribed performance adaptive control for multi-input multi-output affine in the control nonlinear systems[J].IEEE Transactions onAutomatic Control,2010,55(5):1220-1226.
[7]BECHLIOULIS C P,ROVITHAKIS G A.Robust partialstate feedback prescribed performance control of cascade systems with unknown nonlinearities[J].IEEE Transactions onAutomatic Control,2011,56(9):2224-2230.
[8]KOSTARIGKAA K,ROVITHAKIS G A.Prescribed performance output feedback control:an approximate passiv-ation approach[C]//18thMediterranean Conference on Control&Automation(MED).Marrakech,Morocco:IEEE,2010:1483-1494.
[9]KOSTARIGKAA K,ROVITHAKIS G A.Prescribed performance output feedback/observer-free robust adaptive control of uncertain systems using neural networks[J]. IEEE Transactions on Systems,Man,and Cybernetics:Cybernetics,2011,41(6):1483-1494.
[10]KOSTARIGKA A K,ROVITHAKIS G A.Adaptive dynamic output feedback neural network control of uncertain MIMO nonlinear systems with prescribed performance[J].IEEE Transactions on Neural Networks and Learning Systems,2012,23(1):138-149.
[11]BECHLIOULIS C P,ROVITHAKIS G A.A priori guaranteed evolution within the neural network approximation set and robustness expansion via prescribed performance control[J].IEEE Transactions on Neural Networks and Learning Systems,2012,23(4):669-675.
[12]NA J.Adaptive prescribed performance control of nonlinear systems with unknown dead zone[J].International Journal of Adaptive Control and Signal Processing,2013,27(5):426-446.
[13]BECHLIOULIS C P,ROVITHAKIS G A.Approximation-free prescribed performance control for unknown SISO pure feedback systems[C]//Proceedings of European Control Conference(ECC).Zurich,Switzerland:IEEE,2013:4544-4549.
[14]BECHLIOULIS C P,ROVITHAKIS G A.Adaptive control with guaranteed transient and steady state tracking error bounds for strict feedback systems[J].Automatica,2009,45(2):532-538.
[15]BECHLIOULIS C P,ROVITHAKIS G A.Robust approximation free prescribed performance control[C]//19thMediterranean Conference on Control&Automation(MED). Corfu,Greece:IEEE,2011:521-526.
[16]ARTEMIS K K,GEORGE A R.Prescribed performance output feedback control:an approximate passivation approach[C]//18thMediterranean Conference on Control& Automation(MED).Marrakech,Morocco:IEEE,2010:11-16.
[17]ARTEMIS K K,GEORGE A R.Prescribed performance output feedback/observer-free robust adaptive control of uncertain systems using neural networks[J].IEEE Transactions on Systems,Man,and Cybernetics,2011,41(6):1483-1494.
[18]ARTEMIS K K,GEORGE A R.Adaptive dynamic output feedback neural network control of uncertain MIMO nonlinear systems with prescribed performance[J].IEEE Transactions on Neural Networks and Learning Systems,2012,23(1):138-149.
[19]CHARALAMPOS P B,ZOE D,GEORGE A R.Robot force/position tracking with guaranteed prescribed performance[C]//IEEE Internalization Conference on Robotics andAutomation.Kobe:IEEE,2009:3688-3693.
[20]ACHILLES THEODORAKOPOULOS,GEORGE A. Guaranteeing preselected tracking quality for uncertain strict-feedback systems with deadzone input nonlinearity and disturbances via low-complexity control[J].Automatica,2015,54(2):135-145.
[21]LI YONGMING,TONG SHAOCHENG.Prescribed performance adaptive fuzzy output-feedback dynamic surface control for nonlinear large-scale systems with time delays[J].Information Sciences,2015,292(3):125-142.
[22]SUI SHUAI,TONG SHAOCHENG,LI YONGMING. Observer-based fuzzy adaptive prescribed performance tracking control for nonlinear stochastic systems with input saturation[J].Neurocomputing,2015,158(2):100-108.
[23]CHARALAMPOS P BECHLIOULIS,GEORGE A ROVITHAKIS.A low-complexity global approximation-free control scheme with prescribed performance for unknown pure feedback systems[J].Automatica,2014,50(8):1217-1226.
[24]HUAN CHANGCHUN,ZHANG LIULIU,GUAN XINPING.Output feedback control for interconnected timedelay systems with prescribed performance[J].Neurocomputing,2014,129(3):208-215.
[25]WANG MIN,WANG CONG,LIU XIAOPING.Dynamic learning from adaptive neural control with predefined performance for a class of nonlinear systems[J].Information Sciences,2014,279(1):874-888.
[26]胡云安,耿寶亮,趙永濤.嚴(yán)格反饋非線性系統(tǒng)預(yù)設(shè)性能backstepping控制器設(shè)計(jì)[J].控制與決策,2014,29(8):1509-1512. HU YUNAN,GENG BAOLIANG,ZHAO YONGTAO. Prescribed performance backstepping control of strict feedback nonlinear systems[J].Control and Decision,2014,29(8):1509-1512.(in Chinese)
[27]耿寶亮,胡云安,李靜,等.控制增益為未知函數(shù)的不確定系統(tǒng)預(yù)設(shè)性能反演控制[J].自動(dòng)化學(xué)報(bào),2014,40(11):2522-2529. GENG BAOLIANG,HU YUNAN,LI JING,et al.Prescribed performance backstepping control of uncertain systems with unknown control gains[J].Acta Automatica Sinica,2014,40(11):2522-2529.(in Chinese)
[28]胡云安,耿寶亮,蓋俊峰.初始誤差未知的不確定系統(tǒng)預(yù)設(shè)性能反演控制[J].華中科技大學(xué)學(xué)報(bào):自然科學(xué)版,2014,42(8):43-47. HU YUNAN,GENG BAOLIANG,GAI JUNFENG.Prescribed performance backstepping control for uncertain systems with unknown initial errors[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2014,42(8):43-47.(in Chinese)
[29]陳明,張士勇.基于Backstepping的非線性系統(tǒng)預(yù)設(shè)性能魯棒控制器設(shè)計(jì)[J].控制與決策,2015,30(5):877-881. CHEN MING,ZHANG SHIYONG.Prescribed performance robust controller design for nonlinear systems based on Backstepping[J].Control and Decision,2015,30(5):877-881.(in Chinese)
[30]BECHLIOULIS C,DOULGERI Z,ROVITHAKIS G. Prescribed performance adaptive control for robot force/ position tracking[C]//International Symposium on Intelligent Control.Saint Petersburg:IEEE,2009:920-925.
[31]BECHLIOULIS C,DOULGERI Z,ROVITHAKIS G.Robot force/position tracking with guaranteed prescribed performance[C]//International Conference on Robotics andAutomation.Kobe,Japan:IEEE,2009:3688-3693.
[32]DOULGERI Z,KARAYIANNIDIS Y,ZOIDI O.Prescribed performance control for robot joint trajectory tracking under parametric and model uncertainties[C]// 17thMediterranean Conference on Control&Automation(MED).Thessaloniki,Greece:IEEE,2009:1313-1318.
[33]BECHLIOULIS C,DOULGERI Z,ROVITHAKIS G. Model free force/position robot control with prescribed performance[C]//18thMediterranean Conference on Control&Automation(MED).Marrakech,Morocco:IEEE,2010:377-382.
[34]DOULGERI Z,KARAYIANNIDIS Y.PID type robot joint position regulation with prescribed performance guaranties[C]//International Conference on Robotics and Automation(ICRA).Anchorage,Alaska:IEEE,2010:4137-4142.
[35]DOULGERI Z,DROUKAS L.Robot task space PID type regulation with prescribed performance guaranties[C]// Proceedings of the Intelligent Robots and Systems(IROS).Taipei:IEEE,2010:1644-1649.
[36]BECHLIOULIS C P,DOULGERI Z,ROVITHAKIS G A.Neuro-adaptive force/position control with prescribed performanceandguaranteedcontactmaintenance[J]. IEEE Transactions on Neural Networks,2010,21(12):1857-1868.
[37]KARAYIANNIDIS Y,DOULGERI Z.Robot joint position tracking with an approximator-free prescribed performance controller[C]//19thMediterranean Conference on Control&Automation(MED).Corfu,Greece:IEEE,2011:564-569.
[38]KARAYIANNIDIS Y,DOULGERI Z.Regressor-free robot joint position tracking with prescribed performance guarantees[C]//Proceedings of International Conference on Robotics and Biomimetics(ROBIO).Phuket,Thailand:IEEE,2011:2312-2317.
[39]KOSTARIGKA A K,DOULGERI Z,ROVITHAKIS G A.Prescribed performance tracking for flexible joint robots with unknown dynamics and elasticity[C]//International Conference on Robotics and Automation(ICRA). SaintPaul,Minnesota:IEEE,2012:5365-5370.
[40]BECHLIOULIS C P,DOULGERI Z,ROVITHAKIS G A.Guaranteeing prescribed performance and contact maintenance via an approximation free robot force/position controller[J].Automatica,2012,48(2):360-365.
[41]KARAYIANNIDIS Y,DOULGERI Z.Model-free robot joint position regulation and tracking with prescribed performance guarantees[J].Robotics and Autonomous Systems,2012,60(2):214-226.
[42]HUANG YINGBO,NAN JING,WU XING,et al.Adaptive control of nonlinear uncertain active suspension systems with prescribed performance[J].ISA Transactions,2015,54(10):145-155.
[43]GAI W,WANG H,ZHANG J,et al.Adaptive neural network dynamic inversion with prescribed performance for aircraft flight control[J].Journal of Applied Mathematics,2013,45(12):1-12.
Research Development of Prescribed Performance Control
HU Yunan,ZHANG Lei,GENG Baoliang
(Department of Control Engineering,NAAU,Yantai Shandong 264001,China)
The development and present research situation of prescribed performance control were reviewed.General form single-input single-output strict-feedback nonlinear system was used as example,fundamental principle was analyzed by introducing conceptions of performance function and error transformation.The existing research results showed that some critical technical problems in industry and aircraft control had been solved by prescribed performance control,therefore, prescribed performance control had further research prospects.
prescribed performance control;performance function;error transformation
TP273
A
1673-1522(2016)01-0001-06
10.7682/j.issn.1673-1522.2016.01.001
2015-11-16;
2015-12-29
國(guó)家自然科學(xué)基金資助項(xiàng)目(60674090);中國(guó)博士后基金資助項(xiàng)目(2015M572693)
胡云安(1966-),男,教授,博士,博導(dǎo)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17