基于橢圓空腔虛擬勢場的航天器集群控制方法
2016-11-10 07:50:52安梅巖王兆魁張育林
海軍航空大學學報 2016年1期
安梅巖,王兆魁,張育林
(1.清華大學航天航空學院,北京100084;2.中國航天員中心,北京100193)
基于橢圓空腔虛擬勢場的航天器集群控制方法
安梅巖1,2,王兆魁1,張育林1
(1.清華大學航天航空學院,北京100084;2.中國航天員中心,北京100193)
航天器集群由多個航天器在空間軌道上近距離飛行,進行信息交換,并相互協同共同完成空間任務。航天器集群作為智能集群在空間領域的表現形式,是智能集群的重要組成部分。當前,許多空間科學研究機構提出了多個航天器集群的研究計劃,如ANTS計劃、APIES計劃等。文章以在小行星帶探測航天器集群為研究對象,提出了航天器集群的自組織控制方法,利用虛擬勢場力使得與這個參考航天器構成最大距離可控的空間構型,從而保證了航天器集群中的所有航天器共同構成松散空間構型。
航天器集群;虛擬勢場;自組織;松散空間構型
利用多個人工個體(如地面移動車、水下航行器、空中飛行器、太空衛星等)共同構成人工集群,并通過自組織方法實現多個體之間的協同運行從而完成復雜任務,是智能集群領域的研究熱點之一[1-4]。人工集群的思想來源于自然界中的生物集群,如蟻群、鳥群、蜂群等,通過個體間的相互協作,實現單個個體不可能完成的復雜任務,從而保證了生物群落的生存。生物集群個體間的自組織理論最早由Grasse在1960年提出[5],解釋了生物集群中個體“雜亂無章”的活動與集群整體“穩定有序”的行為間的聯系。自組織理論的提出,為生物集群的研究開辟了新的研究方向,同時也為人工集群的實現奠定了基礎。
自組織方法是人工集群實現人工個體間協同的核心技術。根據原理分為行為規則法、人工物理法和虛擬勢場法。行為規則法是早期研究中提出的一種個體自組織方法,沒有嚴格的理論依據,而是通過樸素的語言描述來確定個體的行為。1986年,Beynolds發明的計算機模型“Boid”采用了靠近規則、對齊規則和避免碰撞規則實現了對鳥群運動計算機模擬[6]。人工物理法來源于對物理學中的物理規律或物理現象的模擬。Spears等[7-8]基于虛擬力的方法實現了六邊形構型的人工集群,可用于傳感網絡在廣闊環境的探測任務。文獻[9]利用虛擬彈簧使所有個體形成了三角形的網格分布。虛擬勢場法通過構建虛擬勢函數來實現個體間的協同控制,由于虛擬勢函數可以根據具體需求進行設計,具有很強的靈活性。Khatib最早提出將虛擬勢場技術應用于單個機器人的控制中,成功解決了實時躲避障礙物的問題[10]。Reif和Wang最早將虛擬勢場法應用在智能集群的個體協同控制中[11]。Howard利用虛擬勢場法研究了移動傳感器網絡節點的布置控制,實現了網絡覆蓋面積的最大化[12]。
在航天領域,基于人工集群提出了航天器集群。航天器集群由多個航天器在空間軌道上近距離飛行,進行信息交換,并相互協同共同完成空間任務。航天器集群作為智能集群在空間領域的表現形式,是智能集群的重要組成部分。針對小行星帶探測任務,NASA提出的ANTS-PAM計劃[13-14]和歐洲航空防務及航天公司(EADS)為歐空局設計的APIES計劃[15]都是以衛星作為人工個體構成的人工集群,對位于火星和木星之間的小行星帶進行探測。ANT-PAM探索任務由可自主控制的皮星集群來實現。依據在集群中的作用可以將皮星分為3類衛星:第1類皮星集群中80%的皮星為“工人”衛星,攜帶專門的探測儀器;第2類皮星為“決策”衛星,協調指揮各“工人”衛星;第3類皮星為“信使”衛星,實現“工人”衛星、“決策”衛星以及地面站之間的信息交換。APIES計劃由一個大型航天器HIVE((Hub and Interplanetary VEhicle)和19個納衛星BEE(Belt Explore)共同組成。HIVE航天器攜帶19個納衛星抵達目標探測軌道(半徑為2.6AU)后,納衛星從HIVE航天器中脫離后與HIVE航天器共同構成探測集群,對目標小行星進行探測。HIVE航天器是探測集群的信息交換中心、探測集群的控制中心,并負責將獲得的探測信息傳回地球。納衛星BEE攜帶CCD相機、紅外光譜儀、以及其他探測設備和通信設備,負責協同對小行星進行探測,并將探測結果發送給HIVE航天器。
本文以航天器集群探測小行星帶為任務背景,提出了一種適用于航天器集群松散構型飛行的自組織控制方法,利用虛擬勢場作用控制航天器,使得與參考航天器構成最大距離可控的空間構型,從而保證了航天器集群中的所有航天器共同構成松散的空間集群構型。文章首先對小行星探測集群控制問題進行了描述;然后,介紹了虛擬勢場的設計方案;最后,給出了一個具體的計算實例,并對計算結果進行了詳細分析。
1 航天器間相對運動
多個航天器共同構成航天器集群時,航天器間需要建立信息鏈路,這就要求航天器間的距離滿足通信鏈路的需求,即航天器間的最大距離是可控制的。這里考慮在近圓軌道上運行的航天器集群中2個航天器之間的最大距離的可控性問題。
在近圓軌道下,以Hill坐標系作為參考坐標系,航天器間的相對運動可近似簡化為:
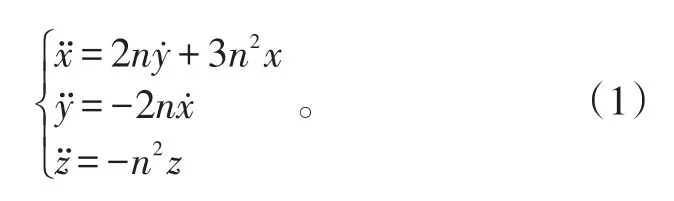
航天器相對于參考航天器的運動方程為:
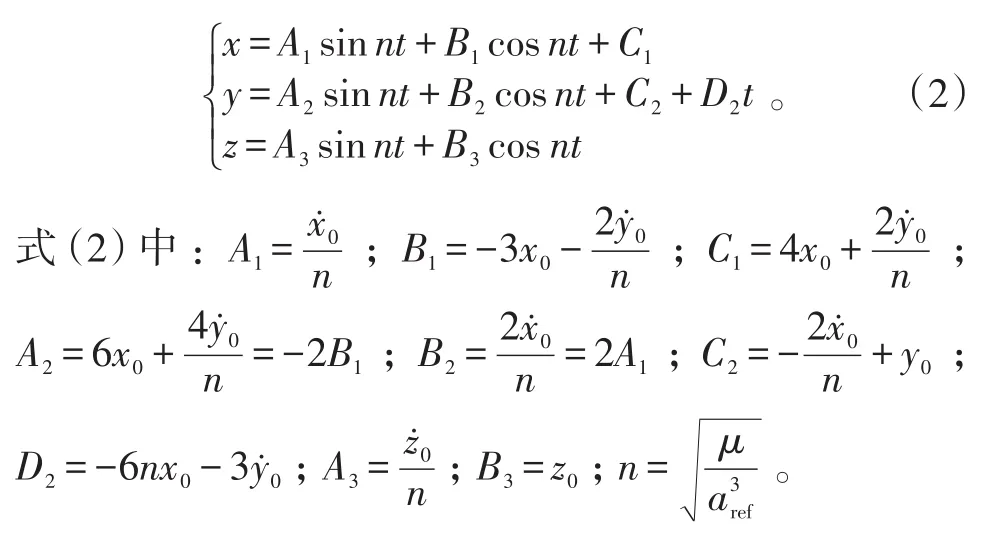
由式(2)可知,z向的運動獨立于x向和y向,并且為周期性運動。因此,只要在x-y平面內最大相對距離可控,則在空間中的最大距離必可控。x-y平面內的運動滿足:

因此,在x-y平面內的相對運動軌跡為一個橢圓,短半軸沿x軸方向,即地心失徑方向,長半軸沿y軸方向,即跡向,長、短半軸的比例為2∶1。橢圓中心位于,沿跡向漂移,漂移速度為D2。
因此,在D2≠0,由于跡向漂移速度的存在,航天器間的距離必定會隨時間不斷增大,最終導致通信鏈路的失效。在D2=0的條件下,航天器間相對位置在x-y平面上投影的最大距離為相對運動軌跡橢圓的半長軸,由于n的量值非常小,因而相對運動軌跡橢圓的半長軸一般都非常大,尤其是在小行星帶探測軌道上將更加明顯。
航天器間巨大的相對距離將會導致航天器間無法建立有效的信息鏈路,從而導致航天器無法構成協同工作的航天器集群。本文提出了利用一種橢圓空腔型的虛擬勢場,將航天器間的相對運動軌跡控制在2個橢圓構成的空腔內,從而保證航天器間的相對距離的可控性。
2 橢圓空腔虛擬勢場設計
建立一個如圖1所示的虛擬勢場,大橢圓以外的區域,具有向內收縮的趨勢,而小橢圓內的區域則具有向外發散的趨勢。在大橢圓和小橢圓之間的區域為空腔區域,空腔區域內不存在收縮趨勢和發散趨勢,或者趨勢的量級極小。可以想象,在圖1所示的虛擬勢場的作用下,航天器將在橢圓構型的空腔區域內以較小的控制代價保持航天器間的構型不會發散。
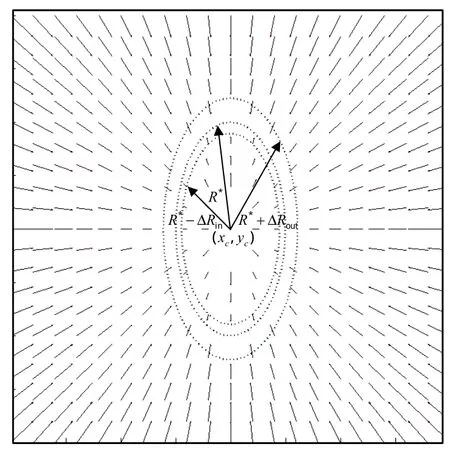
圖1 橢圓空腔虛擬勢場概念圖Fig.1 Concept of the virtual potential field with elliptic cavity
所需的橢圓空腔虛擬勢場作用可表示為:

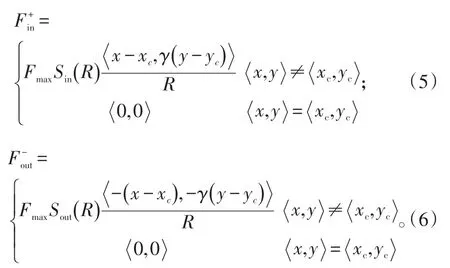
式(5)、(6)中:Fmax為虛擬勢場作用大小的最大值,為一常值;Sin(R)和Sout(R)為虛擬作用大小調節函數;其余部分為單位矢量,用于控制虛擬作用的方向。
Sin(R)和Sout(R)分別取:
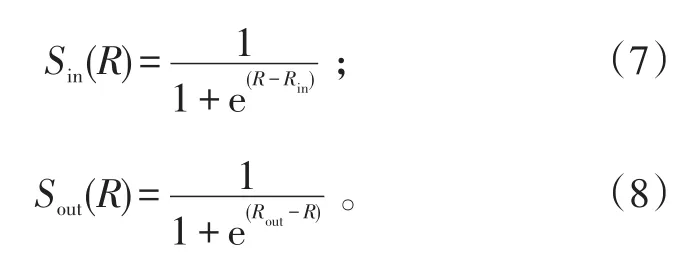
且滿足:當R=R*時,Sin(R)=Sout(R);當R≥R*-ΔR時,Sin(R)≤ε;當R≤R*+ΔR時,Sout(R)≤ε。因此:
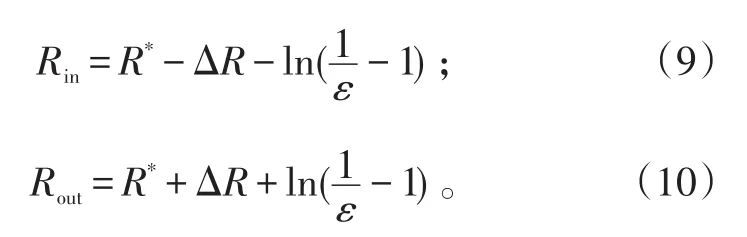
圖2給出了虛擬勢場作用大小隨橢圓距離R變化的示意圖,可以看出在區間內小于ε,并且在R*處為0。
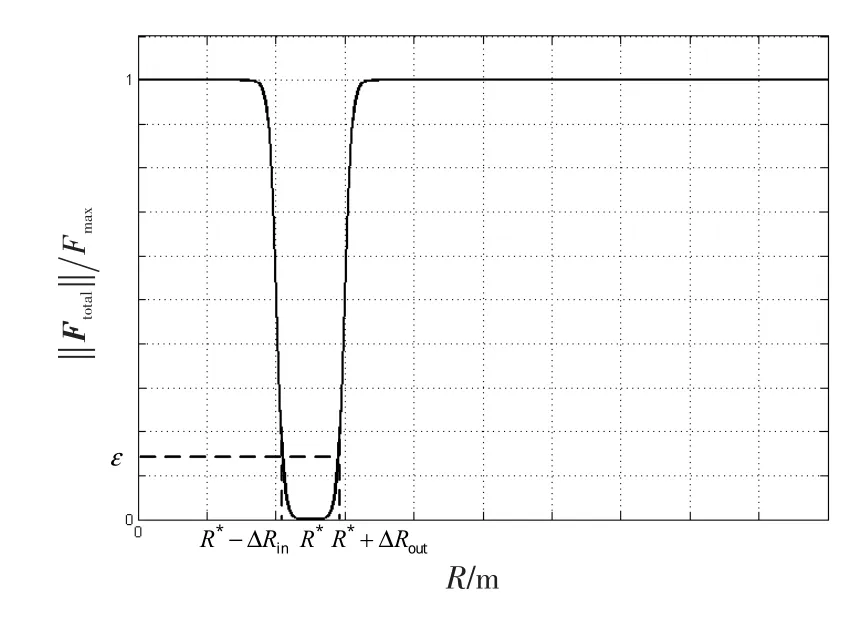
圖2 虛擬勢場作用大小隨橢圓距離R變化示意圖Fig.2 Sketch map of the virtual potential field function vs elliptical distanceR

圖3 虛擬勢場作用在x-y平面的分布圖Fig.3 Distribution map of virtual potential field function onx-yplane
3 基于橢圓空腔虛擬勢場的航天器相對運動控制
以小行星探測集群中2個航天器的控制為例,對橢圓空腔虛擬勢場的控制效果進行計算和評估。根據式(1)可知,航天器的相對運動控制方程可表示為:
參考軌道選用APIES計劃中提出的太陽圓軌道,軌道半徑為2.6AU(3.889 6×1011m)。
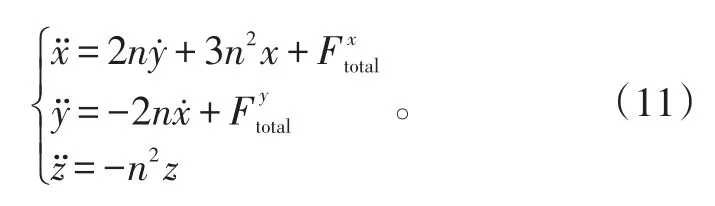
控制效果見圖4。其中,圖4 a)為橢圓空腔虛擬勢場作用下航天器1和航天器2相對運動在x-y平面上的投影;圖4 b)為航天器相對運動的三維顯示圖中的細虛線代表航天器1的相對運動軌跡,粗實線代表航天器2的相對運動軌跡;圖4 c)為航天器1在橢圓空腔虛擬勢場作用下的相對運動和無控制狀態下航天器相對運動在x-y平面內的對比;圖4 d)為圖4 c)對應的三維圖形。從圖中可以看出,在橢圓空腔虛擬勢場的作用下,航天器的相對運動被控制在了橢圓周圍,實現了對航天器相對運動的控制。
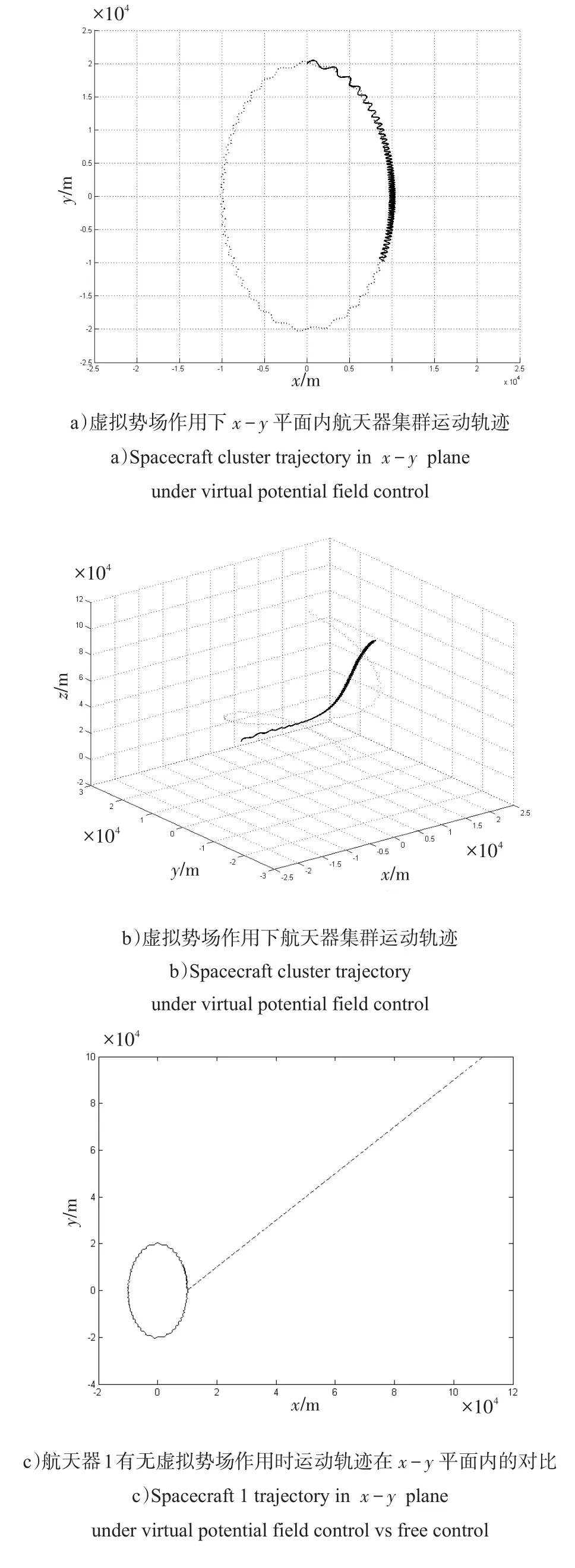

圖4 橢圓空腔虛擬勢場控制結果(10 000 s)Fig.4 Control results of virtual potential field with elliptical cavity
4 結論
本文設計了一種橢圓空腔虛擬勢場。利用本文提出的橢圓空腔虛擬勢場來控制航天器,可將航天器間的相對運動軌跡控制在2個橢圓間,從而實現2個航天器間的最大距離可控,可保證航天間信息鏈路的持續有效。更進一步,利用橢圓空腔虛擬勢場來控制航天器集群中兩兩航天器之間的相對運動,可以實現航天器集群中的多個航天器之間的信息鏈路構型控制,為航天器集群的構建建立了基礎。
[1]AN M,WANG Z,ZHANG Y.Design for autonomous self-organizing target detection system based on artificial swarms[C]//2014 International Conference on Multisensor Fusion and Information Integration for Intelligent Systems.Beijing:IEEE,2014:1-5.
[2]FUJISAWA R,DOBATA S,SUGAWARA K,et al.Designing pheromone communication in swarm robotics:group foraging behavior mediated by chemical substance [J].Swarm Intelligence,2014,8(3):227-246.
[3]YANG B,DING Y,JIN Y,et al.Self-organized swarm robot for target search and trapping inspired by bacterial chemo taxis[J].Robotics and Autonomous Systems,2015,72:83-92.
[4]周儀.基于群體智能的多機器人地圖探索研究[D].上海:上海交通大學,2013.ZHOU YI.Swarm intelligence based multi-robot map exploration research[D].Shanghai:Shanghai Jiaotong University,2013.(in Chinese)
[5]GRASSE P P.The automatic regulations of collective behavior of social insect and stigmergy[J].Journal De Psychologie Normale Et Pathologique,1960,57:1-10.
[6]REYNOLDS C W.Flocks,herds and schools:a distributed behavioral model[C]//Acm Siggraph Computer Graphics.New York:ACM,1987:25-37.
[7]SPEARS W M,GORDON D F.Using artificial physics to control agents[C]//1999 International Conference Information Intelligence and Systems.Bethesda:IEEE,1999:281-288.
[8]SPEARS W M,SPEARS D F,HAMANN J C,et al.Distributed,physics-based control of swarms of vehicles[J]. Autonomous Robots,2004,17(2-3):137-162.
[9]SHUCKER B,BENNETT J K.Scalable control of distributed robotic macro sensors[C]//Distributed Autonomous Robotic Systems 6.Berlin:Springer,2007:379-388.
[10]KHATIB O.Real-time obstacle avoidance for manipulators and mobile robots[J].International Journal of Robotics Research,1986,5(1):90-98.
[11]REIF J H,WANG H.Social potential fields:a distributed behavioral control for autonomous robots[J].Robotics andAutonomous Systems,1999,27(3):171-194.
[12]HOWARD A,MATARI? M J,SUKHATME G S.Mobile sensor network deployment using potential fields:a distributed,scalable solution to the area coverage problem [C]//Distributed Autonomous Robotic Systems 5.Berlin:Springer,2002:299-308.
[13]TRUSZKOWSKI W F,et al.Autonomous and autonomic systems:a paradigm for future space exploration missions [J].Systems,Man,and Cybernetics:Part C,2006,36(3):279-291.
[14]TRUSZKOWSKI W F,et al.Autonomous and autonomic systems:with applications to NASA intelligent spacecraft operations and exploration systems[M].Berlin:Springer,2009:220-222.
[15]D'ARRIGO P,SANTANDREA S.The APIES mission to explore the asteroid belt[J].Advances in Space Research,2006,38(9):2060-2067.
Spacecraft Cluster Control Method Based on Virtual Potential Field with Elliptic Cavity
AN Meiyan1,2,WANG Zhaokui1,ZHANG Yulin1
(1.School of Areospace,Tsinghua University,Beijing 100084,China; 2.Astronautic Center of China,Beijing 100193,China)
Spacecraft cluster is comprised of many spacecraft,flying in near orbits,exchanging information,cooperating with each other to perform a space task.As a form of intelligent swarm in space science,spacecraft is an important part of intelligent swarm.Up to now,space science research institutions have proposed multiple spacecraft cluster programs,such as ANTs,APIES.In this paper,taking the spacecraft cluster for exploring asteroid belt as the research background,a selforganizing method for spacecraft cluster control was put forward,which was based on a virtual potential field with elliptic cavity and the spacecraft cluster was made to form a maximum distance controllable spatial configuration,thereby ensuring all the spacecraft keeping in a loose spatial cluster configuration.
spacecraft cluster;virtual potential field;self-organizing;loose spatial configuration
V448.2
A
1673-1522(2016)01-0007-05
10.7682/j.issn.1673-1522.2016.01.002
2015-08-23;
2015-12-13
國家自然科學基金資助項目(11002076);863計劃資助項目(2014AA7041002)
安梅巖(1978-),男,工程師,博士。