具有輸入飽和的電液伺服系統(tǒng)反步位置跟蹤控制
2016-11-14 02:32:27石勝利李建雄方一鳴
中南大學(xué)學(xué)報(自然科學(xué)版) 2016年10期
石勝利,李建雄,方一鳴
?
具有輸入飽和的電液伺服系統(tǒng)反步位置跟蹤控制
石勝利1, 2,李建雄1,方一鳴1
(1. 燕山大學(xué)工業(yè)計算機控制工程河北省重點實驗室,河北秦皇島,066004;2. 燕山大學(xué)理學(xué)院,河北秦皇島,066004)
針對具有輸入飽和的電液伺服系統(tǒng),設(shè)計一種基于干擾觀測器的反步位置跟蹤控制器。利用干擾觀測器對系統(tǒng)中由外部擾動、參數(shù)不確定等引起的未知復(fù)合干擾進行估計,同時利用跟蹤微分器估計虛擬控制量的微分信號,有效降低控制器復(fù)雜性。基于Lyapunov穩(wěn)定性理論證明在所設(shè)計控制器的作用下,閉環(huán)系統(tǒng)所有信號一致最終有界。最后對某650 mm軋機電液伺服系統(tǒng)進行仿真,驗證所提方法具有較好的跟蹤性能。
電液伺服系統(tǒng);反步控制;輸入飽和;干擾觀測器
電液伺服系統(tǒng)因具有控制精度高、承載能力強、響應(yīng)速度快等特點,被廣泛應(yīng)用于國防、機器人、軋機等領(lǐng)域。但系統(tǒng)本身具有的強非線性特性和不確定性,不僅嚴重影響系統(tǒng)的動態(tài)品質(zhì),而且增加了控制器設(shè)計的難度。近年來,許多非線性控制方法如魯棒H-infinity控制[1]、輸出反饋控制[2]、滑模控制[3]等被應(yīng)用到電液伺服系統(tǒng)中,并取得了一系列成果[1?9]。反步法由于能有效地處理非線性系統(tǒng)中的非匹配不確定項,已被廣泛應(yīng)用于電液伺服系統(tǒng)[4?8]。其中AMIT等[4?5]利用間接自適應(yīng)方法,GUAN等[6]利用直接自適應(yīng)方法處理電液伺服系統(tǒng)中的參數(shù)不確定問題。吳忠強等[8]將反步法與滑模控制相結(jié)合,設(shè)計了自適應(yīng)反步滑模控制器。然而,傳統(tǒng)的反步控制在設(shè)計過程中需要對虛擬控制量進行反復(fù)解析求導(dǎo),從而導(dǎo)致該方法存在計算復(fù)雜性即“計算膨脹”問題,使得控制律會變得很復(fù)雜,降低了反步法的工程實用性。另外,由于物理條件的限制等使得伺服閥的輸入信號是有界的,即電液伺服系統(tǒng)的控制輸入存在飽和非線性[9?11],輸入飽和的存在通常會導(dǎo)致系統(tǒng)性能下降甚至不穩(wěn)定。SHI等[12]利用模糊系統(tǒng)估計系統(tǒng)中的不確定性,并結(jié)合H-infinity控制方法,研究了具有輸入飽和的電液伺服系統(tǒng)的位置跟蹤控制問題。但模糊系統(tǒng)存在在線更新需要大量學(xué)習(xí)時間等缺點,影響了其在工程實際中的應(yīng)用。基于以上分析,本文作者針對具有參數(shù)不確定、外部擾動和輸入飽和非線性的電液伺服系統(tǒng),提出一種基于干擾觀測器[13?14]的反步位置跟蹤控制策略,以保證電液伺服系統(tǒng)穩(wěn)定的同時,具有良好的跟蹤性能。該策略利用干擾觀測器估計和補償系統(tǒng)中由參數(shù)不確定、外部擾動和輸入飽和產(chǎn)生的復(fù)合干擾。并基于干擾觀測器的輸出,利用反步法設(shè)計位置跟蹤控制器。在反步法的設(shè)計過程中,通過利用跟蹤微分器獲得虛擬控制量的微分信號,避免了對虛擬控制量反復(fù)解析求導(dǎo)計算帶來的“計算膨脹”問題,簡化了控制器的設(shè)計。利用Lyapunov理論分析了閉環(huán)系統(tǒng)的穩(wěn)定性。最后將所提出的算法應(yīng)用到某650 mm軋機電液伺服位置系統(tǒng)進行仿真,驗證所提方法的有效性。
1 電液伺服系統(tǒng)的數(shù)學(xué)模型及問題描述
本文研究的電液伺服系統(tǒng)的結(jié)構(gòu)簡圖如圖1所示。電液伺服系統(tǒng)的數(shù)學(xué)模型主要由液壓缸的力平衡方程和流量方程組成。
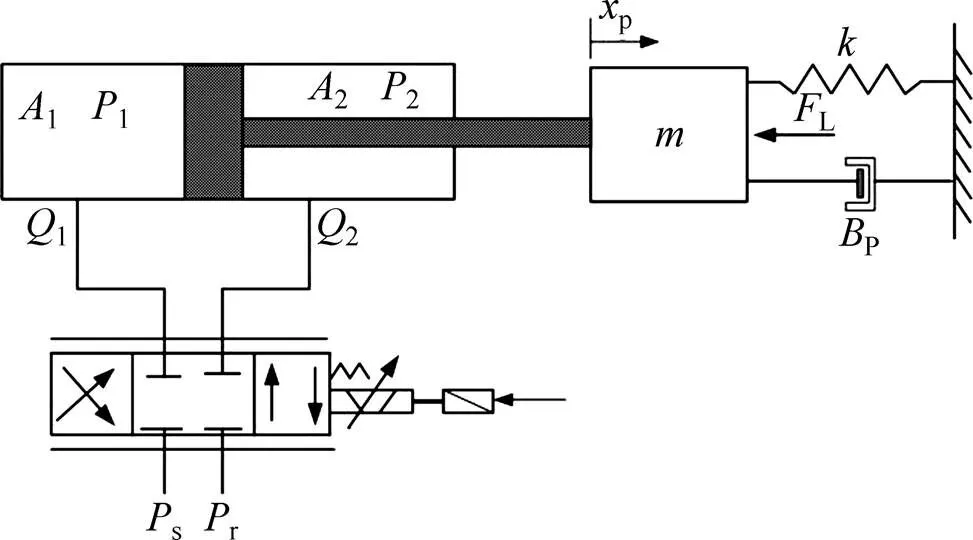
圖1 電液伺服系統(tǒng)等效結(jié)構(gòu)原理圖
系統(tǒng)力平衡方程為[1]
式中:1和2分別為液壓缸2個腔的壓力;1和2分別為兩腔的活塞作用面積;p為負載位移;為負載質(zhì)量;p為活塞的黏滯摩擦因數(shù);s為負載彈性剛度系數(shù);L為作用在活塞上的外負載力、摩擦力以及一些難以建模的阻力等。忽略外泄漏的影響,系統(tǒng)的流量方程為[6]
式中:e為體積彈性模量;t為內(nèi)泄漏系數(shù);;;10和20分別為液壓缸兩腔的初始容積;1為流入液壓缸無桿腔的流量;2為流出有桿腔的流量。流量1和2為[1, 6]:
定義狀態(tài)變量1=p,,3=1,4=2,,則由式(1)~(5)可得系統(tǒng)的狀態(tài)方程為
考慮到伺服閥的輸入信號存在飽和,有
本文的設(shè)計任務(wù)是:在電液伺服系統(tǒng)中存在參數(shù)不確定、外部擾動和輸入飽和非線性時,設(shè)計基于干擾觀測器的反步位置跟蹤控制器,使得系統(tǒng)輸出=1能快速、準確地跟蹤期望軌跡d。假設(shè)期望軌跡d的一階導(dǎo)數(shù)存在且有界。
2 基于干擾觀測器的反步控制器設(shè)計
假設(shè)1:式(8)中復(fù)合干擾1和2的變化率和有界,即存在正常數(shù)和,使得。
2.1 干擾觀測器設(shè)計及收斂性分析
定理1 針對不確定非線性系統(tǒng)(8),設(shè)計如下干擾觀測器:


即觀測誤差滿足式(11)。由式(11)可知:干擾觀測器的觀測誤差有界穩(wěn)定,且隨著觀測器增益的增大,觀測誤差的收斂速度越快,收斂域越小。
2.2 反步控制器設(shè)計及穩(wěn)定性分析
下面根據(jù)前面所建立的干擾觀測器,設(shè)計系統(tǒng)(8)的反步位置跟蹤控制器,具體過程如下。
第1步:定義誤差變量1=1?d,2=2?1,對1求導(dǎo),有

第2步:對2求導(dǎo),有


由式(17)可知2中含有復(fù)合干擾的估計值,因此,若直接對2解析求導(dǎo)比較麻煩,而且隨著系統(tǒng)階次增加,則會導(dǎo)致出現(xiàn)計算膨脹問題,不利于工程實用。為了避免這一問題,本文設(shè)計如下的跟蹤微分器來估計:
式中:1和2為跟蹤微分器的狀態(tài)變量;sgn為符號函數(shù);和為設(shè)計參數(shù),當待設(shè)計的參數(shù)和滿足下式時[15]:
微分跟蹤器(21)的狀態(tài)變量1和2分別能跟蹤虛擬控制量及其微分信號。
設(shè)計系統(tǒng)的控制器如下:

選擇Lyapunov函數(shù)
對式(24)進行求導(dǎo),有

定理2 針對滿足假設(shè)條件1的系統(tǒng)(8),在控制器(23)和干擾觀測器(9)和(10)的作用下,閉環(huán)系統(tǒng)一致最終有界穩(wěn)定。
證明:由式(25)可以進一步得到

則由式(27)可得

3 仿真研究
以某650 mm可逆冷帶軋機電液伺服位置系統(tǒng)為例進行仿真研究。仿真中系統(tǒng)主要物理參數(shù)的標稱值如下:v=1.25×10?4m/V;d=0.61;=0.025;s=2.4×107Pa;r=0 Pa;=850 kg/m3;s=1.25 GN/m;1=0.125 6 m2;2=0.042 2 m2;10=3.768×10?3m3;20=1.266×10?3m3;e=7.0×108Pa;=1 500 kg;P=2.25 MN·s/m。
控制器和濾波器的參數(shù)選為1=1 500,2=400,3=80,=3 000,=0.9,干擾觀測器參數(shù)選擇為1= 2 000,2=80。分別利用本文提出的基于干擾觀測器的反步法(稱為控制器1)和未采用干擾觀測器的反步法(稱為控制器2)進行仿真研究對比。仿真結(jié)果如圖2~5所示。
由圖2和圖3可以看出:在未對復(fù)合干擾進行估計時,系統(tǒng)會存在較大的跟蹤誤差;在使用干擾觀測器對復(fù)合干擾進行估計補償后,控制效果明顯提高,跟蹤誤差穩(wěn)定在0附近的1個很小的區(qū)域內(nèi)。由圖4可知本文設(shè)計的控制器能較快地退出飽和。從圖5可見:本文設(shè)計的干擾觀測器能較好地估計系統(tǒng)中的復(fù)合干擾,觀測誤差較小。

1—期望軌跡yd;2—使用干擾觀測器的反步法;3—未使用干擾觀測器的反步法。

1—使用干擾觀測器的反步法;2—未使用干擾觀測器的反步法。

1—使用干擾觀測器的反步法;2—未使用干擾觀測器的反步法。

(a) D1估計值;(b) D2估計值1—復(fù)合干擾真實值;2—復(fù)合干擾估計值。
4 結(jié)論
1) 針對存在參數(shù)不確定性、外部擾動和控制輸入飽和的電液伺服系統(tǒng),設(shè)計了一種基于干擾觀測器的反步位置跟蹤控制方案。針對系統(tǒng)中存在的復(fù)合干擾,利用干擾觀測器對其進行估計,并在所設(shè)計的反步控制器中進行補償。在反步設(shè)計過程中,利用微分跟蹤器獲得虛擬控制量的微分信號,避免了傳統(tǒng)反步控制中存在的計算膨脹問題。
2) 理論分析結(jié)果表明閉環(huán)系統(tǒng)一致最終有界穩(wěn)定。仿真結(jié)果表明所設(shè)計的反步控制器能快速準確地跟蹤參考信號,具有良好的過渡過程,并且具有較強的魯棒性。
參考文獻:
[1] MILIC V, SITUM Z, ESSERT M. Robust H-infinity position control synthesis of an electro-hydraulic servo system[J]. ISA Transactions, 2010, 49(4): 535?542.
[2] 管城, 潘雙夏. 電液伺服系統(tǒng)的非線性魯棒自適應(yīng)控制[J]. 中國電機工程學(xué)報, 2007, 27(24): 107?112. GUAN Cheng, PAN Shuangxia. Nonlinear robust adaptive control of electro-hydraulic system[J]. Proceedings of the CSEE, 2007, 27(24): 107?112.
[3] 劉云峰, 繆棟. 電液伺服系統(tǒng)的自適應(yīng)模糊滑模控制研究[J]. 中國電機工程學(xué)報, 2006, 26(14): 140?144. LIU Yunfeng, MIAO Dong. Research on adaptive fuzzy sliding mode control for electro-hydraulic servo system[J]. Proceedings of the CSEE, 2006, 26(14): 140?144.
[4] AMIT M, YAO B. Integrated direct/indirect adaptive robust control of hydraulic manipulators with valve dead band[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(4): 707?715.
[5] KADDISSI C, KENNE J P, SAAD M. Indirect adaptive control of an electro-hydraulic servo system based on nonlinear backstepping[J]. IEEE/ASME Transactions on Mechatronics, 2011, 16(6): 1171?1177.
[6] GUAN C, PAN S X. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters[J]. IEEE Transactions on Control Systems Technology, 2008, 16(3): 434?445.
[7] URSU I, ADRIAN T, ANDREI H, et al. New stabilization and tracking control laws for electro-hydraulic servomechanisms[J]. European Journal of Control, 2013, 19(1): 65?80.
[8] 吳忠強, 夏青. 基于奇異攝動理論的電液伺服系統(tǒng)Backstepping滑模自適應(yīng)控制[J]. 振動與沖擊, 2012, 31(11): 154?157. WU Zhongqiang, XIA Qing. Backstepping sliding mode adaptive control of an electro-hydraulic servo system based on singular perturbations theory[J]. Journal of Vibration and Shock, 2012, 31(11): 154?157.
[9] DU H P, ZHANG N. Fuzzy control for nonlinear uncertain electro-hydraulic active suspensions with input constraint[J]. IEEE Transactions on Fuzzy Systems, 2009, 17(2): 343?356.
[10] 李建雄, 方一鳴, 石勝利. 具有輸入飽和的軋機液壓伺服系統(tǒng)魯棒動態(tài)輸出反饋控制[J]. 控制與決策, 2013, 28(2): 211?216. LI Jianxiong, FANG Yiming, SHI Shengli. Robust dynamic output-feedback control of hydraulic servo system with input saturation for rolling mill[J]. Control and Decision, 2013, 28(2): 211?216.
[11] MARUSAK P M, SUWAT K. Constrained model predictive force control of an electro-hydraulic actuator[J]. Control Engineering Practice, 2011, 19(1): 62?73.
[12] SHI S L, FANG Y M, LI J X, et al. Adaptive position tracking control for electro-hydraulic servo system with input saturation[J]. ICIC Express Letters, 2012, 6(10): 2699?2704.
[13] CHEN M, CHEN W H, WU Q X. Adaptive fuzzy tracking control for a class of uncertain MIMO nonlinear systems using disturbance observer[J]. Sci China Inf Sci,2012,55, doi: 10.1007/s11432-012?4695-3.
[14] 賈鶴鳴, 宋文龍. 基于非線性干擾觀測器的L2濾波反步控制[J]. 中南大學(xué)學(xué)報(自然科學(xué)版), 2014, 45(8): 2640?2647. JIA Heming, SONG Wenlong. L2 filtered backstepping control based on nonlinear disturbance observer[J]. Journal of Central South University (Science and Technology), 2014, 45(8): 2640?2647.
[15] 韓京清. 自抗擾控制技術(shù)[J]. 前沿科學(xué), 2007, 1(1): 24?31. HAN Jingqing. Auto disturbances rejection control technique[J]. Frontier Science, 2007, 1(1): 24?31.
[16] KHALIL H K. Nonlinear systems[M]. 2nd ed. NJ: Prentice-Hall, 1996: 174?180.
(編輯 陳燦華)
Backstepping position tracking control for electro-hydraulic servo system with input saturation
SHI Shengli1, 2, LI Jianxiong1, FANG Yiming1
(1. Key Laboratory of Industrial Computer Control Engineering of Hebei Province,Yanshan University, Qinhuangdao 066004, China; 2. College of Science, Yanshan University Qinhuangdao 066004, China)
A backstepping position tracking controller based on disturbance observer was proposed for electro-hydraulic servo system in the presence of parameter uncertainties, external disturbances and input saturation. Disturbance observer and tracking differentiators were used to estimate the compound disturbances and the derivative signal of the virtual control. All the signals in the closed-loop system were uniformly ultimately bounded under the proposed backstepping control scheme. Finally, simulations were presented on the electro-hydraulic servo system of 650 mm rolling mill, and the simulation results show good tracking performance of the proposed control scheme.
electro-hydraulic servo system; backstepping control; input saturation; disturbance observer
10.11817/j.issn.1672-7207.2016.10.012
TP273
A
1672?7207(2016)10?3369?06
2015?11?22;
2016?01?12
國家自然科學(xué)基金資助項目(61074099,61273004);河北省教育廳科學(xué)研究計劃項目(Z2009145);燕山大學(xué)博士基金資助項目(B925)(Projects(61074099, 61273004) supported by National Natural Science Foundation of China; Project(Z2009145) supported by Science Foundation of Education Committee of Hebei Province; Project(B925) supported by the PhD Programs Foundation of Yanshan University)
石勝利,博士研究生,講師,從事自適應(yīng)魯棒控制理論與應(yīng)用、抗飽和控制等研究;E-mail:ssl@ysu.edu.cn
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
