旋挖鉆機回轉制動能量回收系統設計與分析
2016-11-14 02:32:38胡均平李科軍
中南大學學報(自然科學版) 2016年10期
胡均平,李科軍
?
旋挖鉆機回轉制動能量回收系統設計與分析
胡均平,李科軍
(中南大學機電工程學院,湖南長沙,410083)
為利用旋挖鉆機在回轉階段的制動能量,提出一種基于二次調節技術和液壓蓄能器的能量回收系統。通過分析上車回轉的工況特點,運用功率鍵合圖理論建立回轉動能回收利用的數學模型。針對系統參數的不確定性及存在的外干擾,設計自適應模糊滑模控制器對回轉速度進行跟蹤控制,并利用李雅普諾夫函數證明控制系統的穩定性和收斂性。為對系統進行優化設計,仿真分析液壓蓄能器容積、充氣壓力及回轉制動時間這3個主要因素對系統工作性能的影響規律。研究結果表明:所提出的回轉系統在制動時能有效地完成能量回收,其中,回轉制動時間對系統工作壓力和能量回收效率影響最大,而液壓蓄能器容積和充氣壓力對能量回收效率影響較小,但對恒壓網絡壓力波動影響較大。
旋挖鉆機;回轉動能;能量回收;二次調節技術;自適應模糊控制
旋挖鉆機是工程機械行業中機電液一體化施工的高端設備,用于完成深基礎灌注樁的鉆孔作業,孔深可達數十米。隨著城市地鐵輕軌等大規模基礎工程建設的啟動,該設備在我國得到了廣泛應用和發展[1]。旋挖鉆機的結構主要由動力頭、鉆具、鉆桿、變幅機構、回轉裝置和底盤等組成。回轉裝置是旋挖鉆機中的1個非常重要的工作部件,在作業中頻繁地起停和往復運動。上車回轉可分為啟動、回轉、制動3個階段。由于回轉機構轉動慣量大,制動時釋放出大量的慣性能,但都消耗在平衡閥的節流口上,不僅浪費能量,增加系統的熱負荷,而且降低液壓元件的使用壽命,影響系統的正常工作[2]。因此,研究旋挖鉆機的回轉制動能量回收對于整機的節能減排、穩定工作具有重要意義。現有的制動能量回收系統大致可以分為機械式儲能、蓄電池式儲能和液壓式儲能三大類。機械式儲能主要采用飛輪儲能,但飛輪較大的質量與體積需要較大的安裝空間,且在惡劣環境下存在安全隱患[3?4];以超級電容和蓄電池為儲能元件的油電混合動力技術存在功率密度低、能量轉換環節多引起能量回收效率低、現有電容/蓄電池技術不成熟等缺陷,不太適合工程機械[5?7]。現階段采用蓄能器作為儲能裝置的液壓混合動力技術逐漸成為熱點,它具有功率密度大、能量轉換次數少、能量回收效率高等優點[8]。液壓混合動力技術在車輛領域的成功應用為旋挖鉆機的節能減排提供了一種新的途徑和研究思路[9?11]。本文以某型旋挖鉆機為研究對象,首先根據上車回轉的工況特點,提出一種基于二次調節技術和液壓蓄能器的回轉制動能量回收系統[12],并運用鍵合圖理論建立系統的數學模型;然后,針對液壓系統高階非線性、參數不確定性及系統振動等特點,引入自適應模糊滑模控制器,實現旋挖鉆機在復雜干擾條件下的轉速控制;最后,通過仿真分析液壓蓄能器容積等主要參數對系統壓力和能量回收效率的影響。
1 回轉制動能量回收系統設計
基于二次調節技術的旋挖鉆機回轉制動能量回收系統結構如圖1所示。該系統主要由恒壓變量泵、液壓蓄能器、二位二通電磁換向閥、液壓泵/馬達(二次元件)、轉速傳感器、電液伺服閥和變量油缸等組成。發動機驅動恒壓變量泵為液壓泵/馬達提供壓力油源,液壓蓄能器配置在恒壓變量泵和液壓泵/馬達之間,吸收系統多余的功率和回轉機構的慣性能,同時通過先導油源調節液壓泵/馬達的排量實現對回轉速度的控制。具體工作流程為:在回轉啟動時,換向閥1和2開通,恒壓變量泵與液壓蓄能器一起給液壓泵/馬達供油,液壓泵/馬達工作在液壓馬達工況,驅動回轉機構轉動;在回轉制動時,液壓泵/馬達工作在液壓泵工況,并受慣性負載的驅動向液壓蓄能器供油,實現回轉動能的回收,當制動完成時,換向閥2關閉;在下次啟動時,換向閥2開通,液壓泵/馬達再次工作在液壓馬達工況,液壓蓄能器將上次回收的能量進行釋放,驅動回轉機構轉動。
傳統旋挖鉆機回轉裝置的驅動由發動機和液壓泵提供,通過控制閥組、液壓馬達和減速機傳遞到旋挖鉆機的上部回轉機構,通過溢流閥、平衡閥等元件的節流作用來制動,存在著能耗大和系統發熱的問題,嚴重時影響系統的正常工作。在圖1所示的能量回收系統中,制動及換向功能可利用液壓泵/馬達的四象限工作特性來實現,不僅消除了各種節流損失,而且能有效地完成制動動能的回收與再利用。作業人員對速度的要求可通過控制系統實現,即控制系統根據預設的轉速命令進行速度控制。

圖1 基于二次調節技術的回轉系統原理
2 數學建模
建模前對系統進行如下簡化:1) 對液壓元件的容性、阻性的參數進行集中處理;2) 泵輸入轉速恒定,輸出工作流量穩定,忽略其脈動特性;3) 恒壓變量泵的斜盤調節、換向閥的開啟都視為瞬態過程;4) 工作油液的慣性不予考慮;5) 先導油源壓力穩定;6) 液壓蓄能器的儲/釋能過程近似為等溫絕熱過程。根據旋挖鉆機回轉制動的工作原理,建立圖2所示的回轉系統鍵合圖模型。
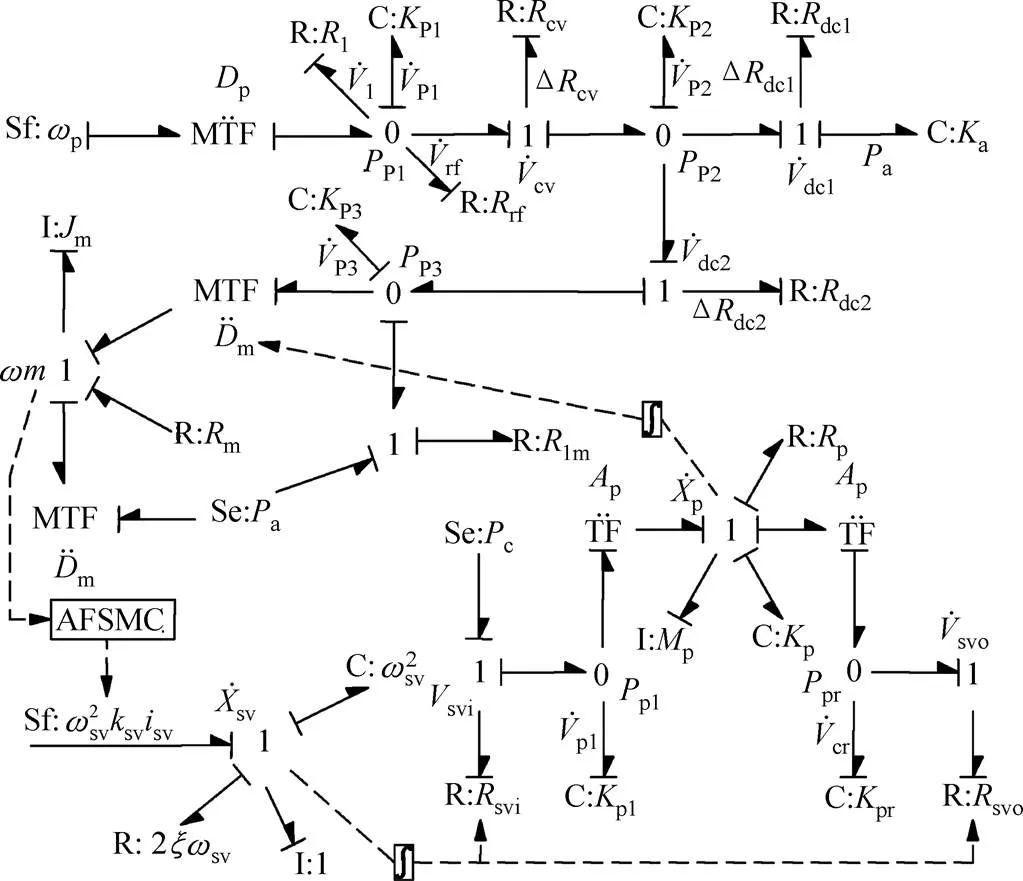
圖2 回轉系統鍵合圖模型
圖2中:p為恒壓變量泵每轉排量,受出口壓力控制;p1為泵出口到單向閥之間工作容腔的等效液壓剛度;pl為泵的泄漏液阻,泄漏流量為;rf為溢流閥溢流時的液阻,溢流流量為;cv為單向閥的液阻,流過的流量為;dv1和dv2分別表示換向閥1和2的液阻,流過的流量分別為和;p2為單向閥出口、溢流閥入口和換向閥1和2進口之間工作容腔的等效液壓剛度;a為高壓蓄能器的剛度系數,與流量有關;p3為換向閥2出口和雙向變量泵/馬達進口之間工作容腔的等效液壓剛度;m為變量泵/馬達每轉排量,受變量油缸活塞桿位移的控制;m和m分別為回轉機構經減速機折算到變量泵/馬達輸出軸的轉動阻尼系數和轉動慣量;ml為變量泵/馬達的泄漏液阻,流過的流量為;a為變量泵/馬達出口壓力,取值為0 Pa;電液伺服閥的進出口液阻分別為svi和svo,流過的流量分別為和;變量油缸左、右工作容腔的等效液壓剛度分別為cl和cr;p,c和p分別為變量油缸活塞有效作用面積、活塞與缸筒之間的黏性阻尼系數和活塞桿組件的質量;,,sv和分別為電液伺服閥的自然頻率、運動阻尼系數、電流增益和輸入電流。根據鍵合圖模型狀態方程的生成規則,可以推導出回轉制動時能量回收利用的數學模型。
管路1流量連續性方程為
管路2流量連續性方程為
管路3流量連續性方程為
變量泵/馬達輸出軸的力矩平衡方程為
變量泵/馬達的轉速為
電液伺服閥閥芯的運動方程為
變量油缸活塞桿組件的力平衡方程為
式中:pp為變量油缸彈簧預壓縮量。
變量油缸活塞桿組件的速度為
變量油缸左腔流量連續性方程為
變量油缸右腔流量連續性方程為
3 自適應模糊滑模控制器設計
能量回收系統是高階系統,具有高度非線性、參數不確定性、系統振動和負載靈敏性等特點,這些都嚴重影響系統的動態性能。自適應模糊滑模控制結合了滑模控制和自適應模糊邏輯控制的優點,對系統的非線性、參數的攝動及外界的干擾具有較強的魯棒性能[13?19],為旋挖鉆機回轉速度的控制提供了一種較好的解決途徑。
3.1 控制器設計
為消除外界干擾和補償系統不確定性對回轉速度控制的影響,首先設計滑模控制器。控制器的輸入與輸出分別為回轉機構的轉速r(即m/,為減速機的傳動比)和泵/馬達排量調節機構的輸入()(即電液伺服閥輸入電流)。通過式(1)~(10)可得速度控制的狀態方程。
令d為速度指令,定義系統的跟蹤誤差為
式中:1和2為非零正常數。當滑模控制處于理想狀態時,,即
根據式(11)和(13)可得滑模控制器的控制律為
但在實際應用中,系統結構和參數具有不確定性,且伴隨未知干擾的影響,往往難于獲得,為此,采用模糊控制器逼近理想控制律*。
模糊控制器以滑模面函數為輸入,構成1個單輸入模糊系統,從而減少模糊規則的數量。模糊規則的形式為:(其中,=1,2,…,;和a為模糊集合)。
取為可調參數向量,為模糊基向量,采用重心法進行模糊系統反模糊化,得到模糊控制器的輸出為
根據一致逼近原理,模糊控制器式(15)在某一緊集中能夠以任意精度一致逼近任意的連續實函數。因此,存在1個最優模糊控制輸出量逼近*(),即
由式(18)和(19)可得
自適應模糊滑模控制系統的結構如圖3所示。

圖3 自適應模糊滑模控制系統
3.2 自適應控制算法設計
式(13)對時間求導可得
結合式(15)和(22)有
由式(21)和(23)可得
采用Lyapunov方法分析所設計控制器的穩定性,定義Lyapunov函數為
將式(25)對時間求導可得
則
由以上的分析可以得出所設計的控制器是穩定的,并且系統的誤差會被控制在很小的范圍內。
4 仿真分析
以某型旋挖鉆機為研究對象,主要仿真參數見表1。需要說明的是:1) 鉆斗上泥沙的質量與整個回轉機構相比,基本上可以忽略,因而,在回轉運動過程中,系統的轉動慣量視為定值;2) 旋挖鉆機的上車回轉具有周期性特點,只需選取1個工作周期(正向啟動—正轉—制動—反向啟動—反轉—制動)進行仿真分析;3) 回轉機構轉動慣量較大,為避免高轉速運動對整機的沖擊,保證系統穩定,同時兼顧鉆機的作業效率,轉速控制在4 r/min左右。圖4所示為預設的輸入速度曲線。運用Matlab軟件對建立的回轉系統速度控制模型進行仿真求解,仿真時間設為20 s。
圖4所示為1個周期以內旋挖鉆機轉速的響應曲線。從圖4可以看出:控制系統可以較好地跟蹤預設的輸入速度信號,系統無明顯振蕩,響應速度快且趨近效果好,證明采用的控制方法有效。圖5所示為系統的流量響應曲線。分析圖5可知:在3.0 s時,開始回轉啟動,液壓蓄能器單獨給變量泵/馬達供油;在3.4 s時,系統壓力下降到恒壓泵調定值以下,恒壓泵和高壓蓄能器一起給系統供油;在4.4 s時,回轉速度趨于穩定,恒壓泵同時給高壓蓄能器及變量泵/馬達供油;在8.2 s時,開始回轉制動,變量泵/馬達將回轉慣性能轉化為液壓能存儲在液壓蓄能器中,恒壓泵停止供油;在8.8 s時,完成回轉制動。反向啟動—反轉—制動的動態響應過程類似。

表1 能量回收系統仿真參數

1—預設轉速曲線;2—跟蹤轉速曲線。

1—恒壓泵流量;2—蓄能器流量;3—變量泵/馬達流量。
4.2 參數影響研究
定義制動能量回收的效率為
式中:acc為液壓蓄能器回收的能量;0為制動前回轉系統具有的動能。
圖6(a)所示為液壓蓄能器容積對系統壓力的影響。從6(a)可見:在液壓蓄能器充氣壓力一定的情況下,液壓蓄能器的容積越大,系統壓力在回收能量的過程中變化幅度越小,這有利于提高液壓元件的可靠性和使用壽命。圖6(b)所示為相同工況下液壓蓄能器容積變化對能量回收效率的影響。從圖6(b)可以看出:隨著液壓蓄能器容積的增大,回轉系統制動能量回收效率明顯提高,但當容積增至一定值,如蓄能器容積分別取40 L和63 L時,對應的能量回收效率分別為59.4%和60.0%,增加量較小,能量回收率的提高趨勢減緩,說明再增大液壓蓄能器的容積已無太大意義。
圖7(a)所示為液壓蓄能器充氣壓力對系統工作壓力的影響。從圖7(a)可知:在液壓蓄能器容積一定時,液壓蓄能器充氣壓力越大,系統壓力在回收能量過程中的變化幅度越小。這是因為充氣壓力越大,液壓蓄能器的液壓剛度越大,恒壓網絡的壓力波動就越小,但過大的充氣壓力將降低液壓蓄能器的工作壽命。圖7(b)所示為相同工況下液壓蓄能器充氣壓力對系統能量回收效率的影響。從圖7(b)可見:當充氣壓力為11,14,17和20 MPa時,對應的能量回收效率分別為60.9%,60.1%,59.4%和58.9%。以上分析表明:液壓蓄能器充氣壓力對能量回收效率的影響較小,對系統壓力影響較大。

(a) 系統壓力響應;(b) 能量回收效率蓄能器容積/L:1—16;2—25;3—40;4—60。

(a) 系統壓力響應;(b) 能量回收效率蓄能器充氣壓力/MPa:1—11;2—14;3—17;4—20。
圖8所示為回轉制動時間對系統工作性能的影響。從圖8可見:在制動前回轉速度一定,制動時間由0.3 s增至1.2 s時,系統的壓力由3.5 MPa減至 0.9 MPa,這是因為制動時間越短,因轉制動力越大,系統壓力在回收能量過程中的變化幅度也隨之增大,這可提高系統的能量回收效率(見圖8(b));當制動時間由1.2 s減至0.3 s時,系統的能量回收效率從45.1%增至65.3%)。這是因為制動時間越短,消耗在摩擦、泄露上的能量越少,液壓蓄能器回收的能量越大。在制動時間上,提高回收系統的能量回收效率和降低恒壓網絡壓力波動是相互矛盾的,故設計時要權衡考慮。

(a) 系統壓力響應; (b) 能量回收效率制動時間/s:1—0.3;2—0.6;3—0.9;4—1.2。
5 結論
1) 采用一種基于二次調節技術和液壓蓄能器的回轉液壓系統,通過調整液壓泵/馬達的斜盤角度可完成系統的驅動、制動及換向,從原理上消除了各種節流損失,同時液壓蓄能器短時間內儲存/釋放高密度能量,可以實現旋挖鉆機回轉動能的回收利用。
2) 設計的自適應模糊滑模控制器將自適應控制、模糊控制、滑模控制三者有機結合,充分發揮各自優點,對于旋挖鉆機回轉系統的參數不確定和外部干擾,具有較好的動態響應性能和穩態控制精度,滿足系統轉速控制和工作平穩性的要求。
3) 制動時間對回收系統的影響最大,能量回收效率和系統壓力波動都隨制動時間的減小而增大,設計時應權衡考慮。增加液壓蓄能器的容積可使系統壓力波動減小,并在一定程度上提高能量回收效率;增加液壓蓄能器充氣壓力也可降低系統壓力波動,但對能量回收效率影響較小。
參考文獻:
[1] 何清華, 康輝梅, 朱建新, 等. 動臂變幅工況下旋挖鉆機工作裝置的動力學特性[J]. 中南大學學報(自然科學版), 2012, 43(6): 2150?2156. HE Qinghua, KANG Huimei, ZHU Jianxin, et al. Dynamic mechanical properties of working device of rotary drilling rig under lift-arm luffing conditions[J]. Journal of Central South University (Science and Technology), 2012, 43(6): 2150?2156.
[2] 方曉瑜, 趙宏強, 劉鵬. 旋挖鉆機主卷揚系統下放勢能回收的仿真[J]. 武漢大學學報(工學版), 2012, 45(2): 241?245.FANG Xiaoyu, ZHAO Hongqiang, LIU Peng. Simulation study of main winch system geopotential energy recovery in rotary driller[J]. Engineering Journal of Wuhan University (Engineering Science), 2012, 45(2): 241?245.
[3] 劉海昌, 姜繼海. 飛輪儲能型二次調節流量耦聯系統[J]. 華南理工大學學報(自然科學版), 2009, 37(4): 75?79. LIU Haichang, JIANG Jihai. Flow-coupled secondary regulation system integrated with flywheel energy storage[J]. Journal of South China University of Technology (Science and Technology), 2009, 37(4): 75?79.
[4] 楊欣. 利用飛輪儲能的能量回收型液壓升降系統研究[J]. 液壓與氣動, 2012, 3: 27?29. YANG Xin. Energy-recovery hydraulic lifting system with flywheel energy storage[J]. Hydraulic and Pneumatic, 2012, 3: 27?29.
[5] VANESSA P, TERESA D, ARTURO D R, et al. Super-capacitors fuel-cell hybrid electric vehicle optimization and control strategy development[J]. Energy Convers Manage, 2007, 48(11): 3001?3008.
[6] 龔俊, 何清華, 張大慶, 等. 混合動力叉車節能效果評價及能量回收系統試驗[J]. 吉林大學學報(工學版), 2014, 44(1): 29?34.GONG Jun, HE Qinghua, ZHANG Daqing, et al. Evaluation for energy saving effect of hybrid forklift and testing for energy saving system[J]. Journal of Jilin University (Engineering Science), 2014, 44(1): 29?34.
[7] 王慶豐. 油電混合動力挖掘機的關鍵技術研究[J]. 機械工程學報, 2013, 49(20): 123?129. WANG Qingfeng. Research on key technology of oil-electric hybrid excavator[J]. Journal ofMechanical Engineering, 2013, 49(20): 123?129.
[8] 曹軍峰, 陳杰. 基于制動能量再生系統的蓄能器特性分析[J]. 液壓與氣動, 2010(1): 59?62. CAO Junfeng, CHEN Jie. Characteristics analysis of accumulator applied in regenerative braking system[J]. Chinese Hydraulics & Pneumatics, 2010(1): 59?62.
[9] 李軍成, 劉敬平, 韓志玉. 一種液壓混合動力車輛燃油經濟性研究[J]. 中南大學學報(自然科學版), 2011, 42(1): 80?86. LI Juncheng, LIU Jingping, HAN Zhiyu. Fuel economy of a hydraulic hybrid vehicle[J]. Journal of Central South University (Science and Technology), 2011, 42(1): 80?86.
[10] 伍迪, 姚進, 韓嘉驊, 等. 串聯型液壓混合動力車輛節能控制策略[J]. 農業工程學報, 2013, 29(4): 45?54. WU Di, YAO Jin, HAN Jiahua, et al. Control strategy of a series connected hydraulic hybrid vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(4): 45?54.
[11] 杜玖玉, 苑士華, 魏超, 等. 車輛液壓混合動力傳動技術發展及應用前景[J]. 機床與液壓, 2009, 37(2): 181?184. DU Jiuyu, YUAN Shihua, WEI Chao, et al. The application and development of hydraulic hybrid powertrain of vehicle[J]. Machine Tool & Hydraulics, 2009, 37(2): 181?184.
[12] 姜繼海. 二次調節壓力耦聯靜液傳動技術[M]. 北京: 機械工業出版社, 2013: 5?37. JIANG Jihai. The two regulation pressure coupling hydrostatic transmission technology[M]. Beijing: China Machine Press, 2013: 5?37.
[13] HU Junping, LI Kejun. Thermal-hydraulic modeling and analysis of the bydraulic system by pseudo-bond graph[J]. Journal of Central South University, 2015, 8(2): 267?278.
[14] 胡均平, 李科軍. 螺旋鉆機度幅量時機液耦合動力學的鍵合圖建模[J]. 中南大學學報(自然科學版), 2016, 47(2): 495?502. HU Junping, LI Kejun. Dynamics model of mechanical-hydraulic coupling of auger driller during luffing motion by bond graph[J]. Journal of Central South University (Science and Technology), 2016, 47(2): 492?502.
[15] HO H F, WONG Y K, RAD A B. Adaptive fuzzy sliding mode control with chattering elimination for nonlinear SISO systems[J]. Simulation Modeling Practice and Theory, 2009, 17(7): 1199?1210.
[16] NECHADI E, HARMAS M N, HAMZAOUI A. A new robust adaptive fuzzy sliding mode power system stabilizer[J]. Electrical Power and Energy Systems, 2012, 42(1): 1?7.
[17] NOROOZI N, ROOPAEI M, JAHROMI M Z. Adaptive fuzzy sliding mode control scheme for uncertain systems[J]. Communications in Nonlinear Science and Numerical Simulation, 2009, 14(11): 3978?3992.
[18] CERMAN O, HUSEK P. Adaptive fuzzy sliding mode control for electro-hydraulic servo mechanism[J]. Expert Systems with Application, 2012, 39(11): 10269?10277.
[19] 李安梁, 蔡洪, 白錫斌. 浮球式慣導平臺的自適應模糊滑模穩態控制[J]. 國防科技大學學報, 2013, 12(6): 41?45. LI Anliang, CAI Hong, BAI Xibin. Adaptive fuzzy sliding mode stabilization control for floated inertial platform[J]. Journal of National University of Defense Technology, 2013, 12(6): 41?45.
(編輯 陳燦華)
Design and analysis of energy recovery system of rotary drilling rig during braking motion
HU Junping, LI Kejun
(School of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China)
In order to recover the braking energy from the rotary drilling rig during swing motion, the energy recover system was proposed based on the secondary regulation technology and hydraulic accumulator. According to the working principle of the rotary system, the mathematical model of rotary inertia energy recycling was developed by bond graph. To solve the problem of the uncertain parameters and external disturbances of the system, the adaptive fuzzy sliding mode controller (AFSMC) was employed to track the preset rotational angular velocity, and the Lyapunov function was introduced to confirm the stability and convergence of the control system. To optimize the system design, the effects of main parameters on the system performance were studied. The results show that the rotary braking time has the greatest influence on the system pressure and energy recovery efficiency, while the volume and pre-charge pressure of hydraulic accumulator volume have relatively smaller influence on the energy recovery efficiency, but great influence on the pressure fluctuation of constant pressure network.
rotary drilling rig; rotary kinetic energy; energy recover; the secondary regulation technology; adaptive fuzzy sliding mode controller (AFSMC)
10.11817/j.issn.1672-7207.2016.10.015
TH137.5
A
1672?7207(2016)10?3386?08
2015?11?12;
2016?01?22
國家自然科學基金資助項目(51175518);湖南省科技型中小企業技術創新基金立項項目(12C26214305029) (Project(51175518) supported by the National Natural Science Foundation of China; Project(12C26214305029) supported by the Small and Mid-sized Enterprise Technology Innovation Fund of Hunan Province)
李科軍,博士,從事液壓機械與控制研究;E-mail:likejuncsu@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
