基于雙模式PSO算法求解置換流水車(chē)間調(diào)度問(wèn)題
2016-11-22 01:57:34馬祎航陶文華
電子設(shè)計(jì)工程 2016年15期
關(guān)鍵詞:流水
馬祎航,陶文華,劉 陽(yáng)
(1.遼寧石油化工大學(xué) 信息與控制工程學(xué)院,遼寧 撫順 113000;2.中國(guó)石油撫順石化公司烯烴廠 遼寧 撫順 113009)
基于雙模式PSO算法求解置換流水車(chē)間調(diào)度問(wèn)題
馬祎航1,陶文華1,劉 陽(yáng)2
(1.遼寧石油化工大學(xué) 信息與控制工程學(xué)院,遼寧 撫順 113000;2.中國(guó)石油撫順石化公司烯烴廠 遼寧 撫順 113009)
針對(duì)粒子群算法求解置換流水車(chē)間調(diào)度這類NP-hard問(wèn)題存在的早熟問(wèn)題,本文提出了一種基于隨機(jī)鍵編碼的雙模式飛行粒子群算法。首先,基于ROV規(guī)則對(duì)工件加工順序進(jìn)行隨機(jī)鍵編碼。其次,粒子在搜索過(guò)程中采用帶有自適應(yīng)慣性權(quán)重的雙模飛行方式來(lái)更新位置和速度,避免粒子群陷入早熟收斂狀態(tài)。為了提高解的質(zhì)量,每次迭代過(guò)程中對(duì)PSO優(yōu)化得到的種群最優(yōu)解進(jìn)行鄰域局部搜索。最后,通過(guò)對(duì)標(biāo)準(zhǔn)測(cè)試集的數(shù)值仿真及與其他PSO算法的比較,證實(shí)了所提算法求解該問(wèn)題的有效性與可行性。
置換流水車(chē)間調(diào)度;粒子群算法;鄰域搜索;隨機(jī)鍵
置換流水車(chē)間調(diào)度問(wèn)題(Permutation Flow Shop Scheduling Problem,PFSP)是制造系統(tǒng)中重要的規(guī)劃問(wèn)題[1],是在流水車(chē)間調(diào)度問(wèn)題的基礎(chǔ)上,增加了每臺(tái)機(jī)器加工各工件順序相同的這一特定的約束條件[2],已證明3臺(tái)即為NP-hard問(wèn)題[3]。許多實(shí)際生產(chǎn)過(guò)程都可以簡(jiǎn)化成這類問(wèn)題,而PFSP的優(yōu)化研究能夠?yàn)槠髽I(yè)帶來(lái)更大的生產(chǎn)效益,因此研究PFSP具有重要的理論和實(shí)際意義。
求解PFSP的方法主要分為3大類:精確算法、啟發(fā)式方法和智能算法。雖然理論上精確算法能得到最優(yōu)解,但其運(yùn)算時(shí)間一般無(wú)法接受,因此被用在解決小規(guī)模問(wèn)題。啟發(fā)式方法根據(jù)問(wèn)題特性,能在較短時(shí)間內(nèi)構(gòu)造出解,但難以保證解的質(zhì)量[4]。近年來(lái),隨著計(jì)算智能的發(fā)展,求解PFSP的方法逐步從精確方法和啟發(fā)式方法發(fā)展到智能算法[5],如遺傳算法[6]、量子算法[7]、布谷鳥(niǎo)算法[8]等,盡管這些方法在一些問(wèn)題上具有良好的收斂性,但在大規(guī)模問(wèn)題上卻無(wú)法保證解的質(zhì)量,很容易陷入早熟。
粒子群優(yōu)化 (Particle Swarm Optimization,PSO)算法于1995年由Kennedy和E-berhart提出[9]。它作為一種基于群體的改進(jìn)啟發(fā)式算法,盡管已初步成功地用于解決神經(jīng)網(wǎng)絡(luò)訓(xùn)練、模糊系統(tǒng)控制和組合優(yōu)化等問(wèn)題[10],但在生產(chǎn)調(diào)度方面的研究還是很少的。針對(duì)置換流水線調(diào)度問(wèn)題,文中采用基于ROV規(guī)則的隨機(jī)鍵編碼[11],實(shí)現(xiàn)標(biāo)準(zhǔn)PSO操作直接應(yīng)用在離散優(yōu)化問(wèn)題上,而且也保證了解的合法性及解空間的完備性。為了減小陷入局部最優(yōu)解的可能性,粒子在搜索過(guò)程中采用變軌與不變軌雙模式飛行并根據(jù)群體信息反饋和自身狀態(tài)選擇自己的飛行模式,慣性權(quán)重采用自適應(yīng)線性調(diào)節(jié),最后為了提高解的質(zhì)量,對(duì)粒子群算法優(yōu)化后得到的最優(yōu)解進(jìn)行鄰域局部搜索。
1 問(wèn)題描述
置換流水車(chē)間調(diào)度問(wèn)題是n個(gè)工件在m臺(tái)機(jī)器上的流水加工過(guò)程,屬于流水車(chē)間調(diào)度的一類問(wèn)題,其具有以下特征:
1)每個(gè)工件在各機(jī)器上加工順序相同;
2)每臺(tái)機(jī)器上所有工件的加工順序相同;
3)每個(gè)工件在每臺(tái)機(jī)器上只加工一次;
4)每臺(tái)機(jī)器在任意時(shí)刻只能加工一個(gè)工件。
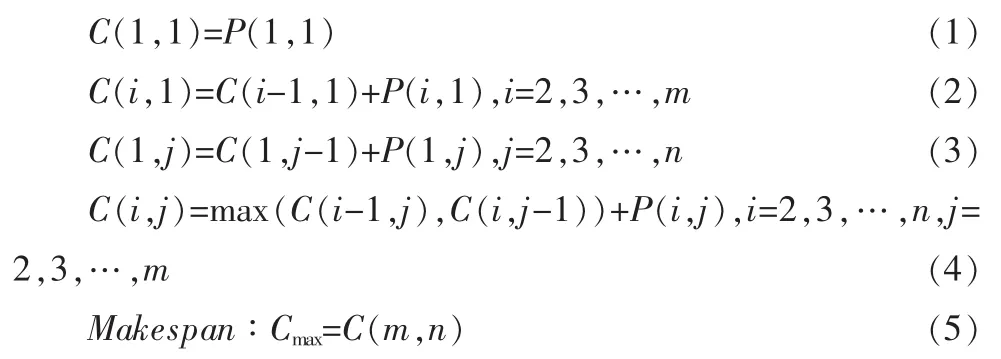
已知工件在各機(jī)器上的準(zhǔn)備時(shí)間和加工時(shí)間,問(wèn)題目標(biāo)是尋找一個(gè)工件加工順序,使各工件按該順序加工的總完成時(shí)間(makespan)最小。假設(shè)n個(gè)工件在m臺(tái)機(jī)器上加工,P為工件i(i=1,2,...,n)在機(jī)j(j=1,2,...,m)上的加工時(shí)間,C(i,j)為工件i在機(jī)器j上的加工完成時(shí)間。則C(i,j)的計(jì)算公式可描述如下:
2 雙模式粒子群算法
2.1 隨機(jī)鍵編碼
本文對(duì)粒子的位置矢量采用基于升序排列規(guī)則(Ranked—Order—Value,ROV)的隨機(jī)鍵編碼實(shí)現(xiàn)粒子連續(xù)位置到離散值的轉(zhuǎn)換,無(wú)需修改PSO算法的進(jìn)化操作,而且能夠保證調(diào)度方案的可行性。
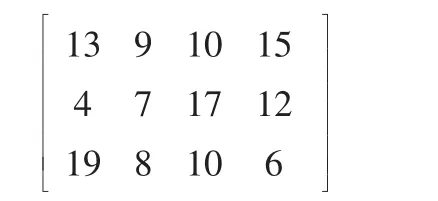
ROV規(guī)則具體描述如下:對(duì)于一個(gè)微粒的位置矢量,首先將值最小的分量位置賦予ROV值為1,其次將值第二小的分量位置賦予ROV值為2,依此類推,直到將所有的分量位置都賦予一個(gè)唯一的ROV值,從而基于ROV值構(gòu)造出一個(gè)工件排序。以3*4 PFSP為例,已知3個(gè)工件在各機(jī)器上加工時(shí)間為:
假設(shè)優(yōu)化得到第k個(gè)粒子的位置為:

經(jīng)ROV規(guī)則得到一個(gè)序列Lk:
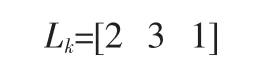
按照該序列對(duì)工件加工重新排序得:
2.2 自適應(yīng)慣性權(quán)重
為了提高算法的收斂穩(wěn)定性及收斂速度,文中采用一種自適應(yīng)慣性權(quán)重的方法。迭代次數(shù)與慣性權(quán)重 成反比是比較廣泛應(yīng)用的PSO算法慣性權(quán)重控制方案:

式中,ω為粒子i在第t次迭代中的取值;Iter為預(yù)先設(shè)定的最大迭代次數(shù);t為當(dāng)前迭代數(shù);ωmax為慣性權(quán)重最大值,典型取值為0.9;ωmin為慣性權(quán)重最小值,典型取值為0.4。
通過(guò)全體粒子上一輪迭代結(jié)束后適應(yīng)值的變化來(lái)選擇慣性權(quán)重的取值:

式中,表示粒子i在第i次迭代后的適應(yīng)值;表示粒子i在第i次迭代后的適應(yīng)值變化。然后確定各粒子在當(dāng)前迭代中慣性權(quán)重的最終取值:

當(dāng)t?[1,2]時(shí),慣性權(quán)重按式(6)取值;當(dāng)t?[3,Iter]時(shí),慣性權(quán)重按式(7)、式(8)取值。
2.3 粒子飛行模式
為了提高算法的全局搜索能力,避免過(guò)早的陷入早熟,本文采用雙模式飛行粒子群算法[12]假設(shè)粒子個(gè)數(shù)為N,第i粒子經(jīng)過(guò)的歷史最優(yōu)位置(i=1,2,…,N):

所有粒子經(jīng)過(guò)的最優(yōu)位置:

分析粒子當(dāng)前位置的優(yōu)劣情況:把群體按適應(yīng)度的大小排序,設(shè)粒子群體規(guī)模是M,記i粒子t時(shí)刻的序號(hào)為s(t),此時(shí),s(t)=1表示i粒子t時(shí)刻的位置在群體中最優(yōu)。若s(t)=M則表示i粒子t時(shí)刻的位置在群體中最差。粒子依據(jù)當(dāng)前位置優(yōu)劣情況按式(11)(12)確定飛行模式。
粒子不變軌飛行模式:

粒子變軌飛行模式:

決策因子:

其中,λ服從(0,1)的均勻隨機(jī)分布,k為[1,2,...,D]的一個(gè)隨機(jī)整數(shù),即i粒子的第d維變軌繞到Gbest(t)的第k維,則稱i粒子按變軌飛行模式飛行。DFi(t)為[0,1]的決策因子,它反映i粒子的當(dāng)前狀態(tài),是i粒子確定其下一步飛行模式的依據(jù)。適應(yīng)度最優(yōu)的決策因子是0,而適應(yīng)度最差的決策因子是1。換言之,處于較優(yōu)位置的粒子傾向于選擇式(11)的不變軌飛行模式,而處于較差位置的粒子傾向于選擇式(12)的變軌飛行。
2.4 鄰域局部搜索
在PSO每次迭代優(yōu)化得到加工順序之后,通過(guò)局部搜索進(jìn)一步尋找工件加工最佳順序。文中采用鄰域局部搜索方法來(lái)確定機(jī)器加工序列[13]。步驟如下:1)DMPSO優(yōu)化后得到所有工件的一個(gè)排序β;2)令k=1,取出β中的前2個(gè)工件,對(duì)兩個(gè)工件先后加工次序進(jìn)行評(píng)價(jià),選擇調(diào)度解小的序列作為當(dāng)前序列;3)令k=k+1,依次將第k個(gè)工件插入到當(dāng)前序列的k個(gè)可能的位置,從中選擇調(diào)度解小的序列作為當(dāng)前序列;4)重復(fù)步驟3),直到β中所有工件均得到新的排序操作。
3 雙模式粒子群算法流程圖
求解PFSP的雙模式粒子群算法(DMPSO)流程如圖1所示。
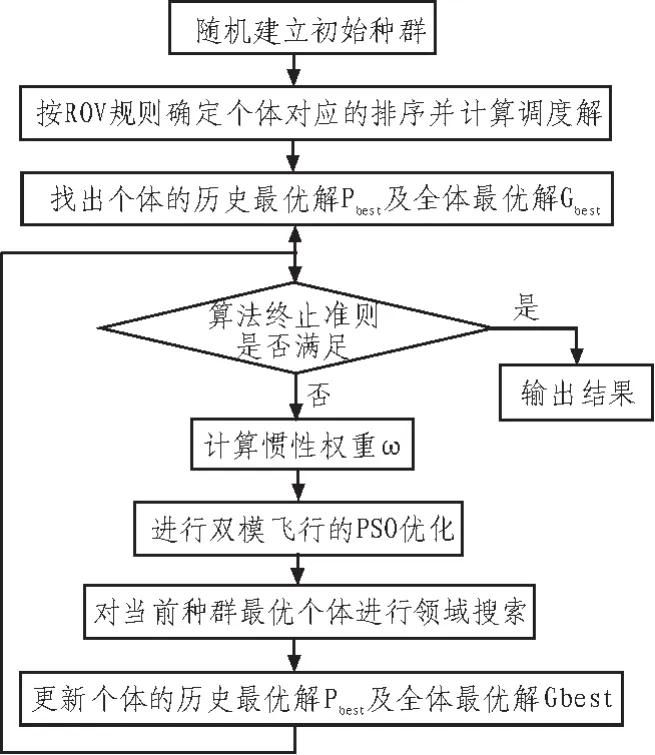
圖1 雙模式粒子群算法流程圖
4 仿真測(cè)試與比較
為了驗(yàn)證本文算法求解PFSP的性能,選擇Car類[14]和Rec類[15]問(wèn)題中進(jìn)行仿真測(cè)試。仿真環(huán)境:Windows7操作系統(tǒng),MATLAB2010,處理器2.9 GHz,內(nèi)存2 GB。參數(shù)設(shè)置為粒子群算法進(jìn)化次數(shù)M=100,種群規(guī)模N=100,加速因子 c1= 1.5,c2=2.5,λ=0.732,粒子位置變化范圍為[1,10]。慣性權(quán)重ωmax=0.9,ωmin=0.4,c*為問(wèn)題最優(yōu)值或目前已知下界值,RE表示算法求出的最優(yōu)值C與C*相對(duì)誤差 (RE=(c-c*)/c*× 100%),對(duì)各類問(wèn)題獨(dú)立運(yùn)行20次得到的平均值,ARE表示平均相對(duì)誤差。表1為在忽略鄰域搜索算法的作用情況下,本文算法與恒定慣性權(quán)重DMPSO算法的平均相對(duì)誤差A(yù)RE比較,表2為常規(guī)粒子群算法、量子粒子群算法[7]平均相對(duì)誤差進(jìn)行對(duì)比,圖2給出的是DMPSO與PSO兩種算法求解Car8的收斂曲線。
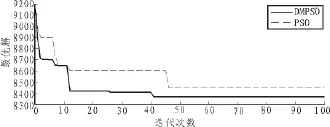
圖2 求解Car8問(wèn)題的DMPSO與PSO收斂曲線
1)從表1可知,自適應(yīng)慣性權(quán)重使得算法尋優(yōu)能力得到很大程度的改善,相對(duì)誤差減小,
驗(yàn)證了自適應(yīng)慣性權(quán)重對(duì)于提高優(yōu)化算法的穩(wěn)定性是有效的。
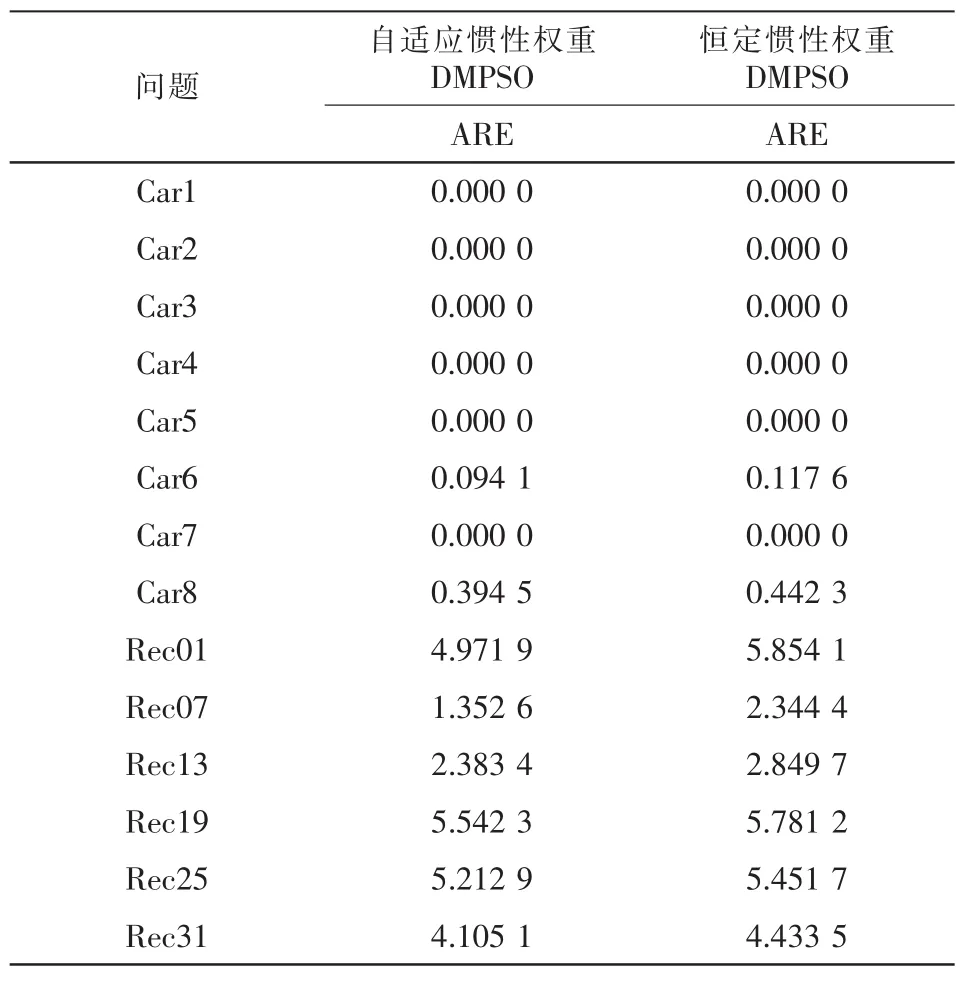
表1 自適應(yīng)慣性權(quán)重對(duì)平均相對(duì)誤差的影響
2)從表2可知,本文算法較其他算法的最優(yōu)解更能接近已知下界值,反映出PSO粒子飛行模式的改進(jìn)是有效的。從ARE指標(biāo)來(lái)看,在Car及Rec問(wèn)題上DMPSO求得的調(diào)度解均優(yōu)于于其他算法,顯示出DMPSO在離散空間具有良好的進(jìn)化機(jī)制。在同等規(guī)模問(wèn)題上,ARE相差不大,表明DMPSO算法具有較強(qiáng)的魯棒性,在求解大規(guī)模問(wèn)題上具有良好的穩(wěn)定性,能夠適用于復(fù)雜的生產(chǎn)過(guò)程中。從運(yùn)算速度上來(lái)看,DMPSO小于CQPSO,但大于PSO,由于DMPSO是在PSO基礎(chǔ)上改進(jìn)了粒子飛行機(jī)制及加入了鄰域搜索算法,因此操作復(fù)雜度要大于PSO,但相比PSO得到的解,DMPSO能夠得到更好的解。
3)由圖2可見(jiàn),DMPSO算法在第41次迭代就得到了最優(yōu)解,而PSO算法在迭代結(jié)束也未能找到最優(yōu)解,因此DMPSO算法不僅具有較快的收斂性,而且在搜索過(guò)程中具有良好的全局搜索能力,保證了求解精度。
5 結(jié)論
文中提出的求解置換流水線調(diào)度問(wèn)題的一種改進(jìn)粒子群算法,通過(guò)實(shí)驗(yàn)證明了本文提出的改進(jìn)算法的有效性。經(jīng)Car和Rec基準(zhǔn)問(wèn)題測(cè)試表明本文提出的改進(jìn)粒子群算法的相對(duì)誤差遠(yuǎn)遠(yuǎn)低于其他粒子群算法,驗(yàn)證了本文算法在求解質(zhì)量、求解穩(wěn)定度上的優(yōu)越性。基于該改進(jìn)算法的良好性能,下一步研究中,可經(jīng)過(guò)適當(dāng)改進(jìn),將算法運(yùn)用于解決混合流水線調(diào)度問(wèn)題。
[1]周馳,高亮,高海兵.基于PSO的置換流水車(chē)間調(diào)度算法[J].電子學(xué)報(bào),2006,36(11):2008-2011.
[2]王凌,劉波.微粒群優(yōu)化與調(diào)度算法[M].北京:清華大學(xué)出版社,2011.
[3]Garey M R,Johnson D S,Sethy R.The complexity of flowshop and job-shop scheduling[J].Mathematics of Operations Research,1976,1(2):117-129.
[4]鄭曉龍,王凌,王圣堯.求解置換流水線調(diào)度問(wèn)題的混合離散果蠅算法[J].控制理論與應(yīng)用,2014,31(2):159-164.
[5]于承敏,鄭麗萍.PSO算法求解PFSP問(wèn)題研究進(jìn)展[J].哈爾濱理工大學(xué)學(xué)報(bào),2012,17(6):14-20.
[6]李小繽,白焰,耿林霄.求解置換流水車(chē)間調(diào)度問(wèn)題的改進(jìn)遺傳算法[J].計(jì)算機(jī)應(yīng)用,2013,33(12):3576-3579.
[7]楊子江,顧幸生.基于混沌量子粒子群算法的置換流水車(chē)間調(diào)度[J].華東理工大學(xué)學(xué)報(bào):自然科學(xué)版,2013,39(3): 325-331.
[8]劉長(zhǎng)平,葉春明.求解置換流水車(chē)間調(diào)度的布谷鳥(niǎo)算法[J].上海理工大學(xué)學(xué)報(bào),2013,35(1):17-20.
[9]Kennedy J,Eberhart R C.Particle swarm optimization[C].// Proceedings of International Con-ference on Neural Networks.Piscataway,N.J.USA:IEEE Press,1995:1942-1948.
[10]于承敏,鄭麗萍.PSO算法求解PFSP問(wèn)題研究進(jìn)展[J].哈爾濱理工大學(xué)學(xué)報(bào),2012,17(6):17-20.
[11]王凌.車(chē)間調(diào)度及其遺傳算法[M].北京:清華大學(xué)出版社,2003.
[12]李景洋,王勇,李春雷.采用雙模飛行的粒子群優(yōu)化算法[J].模式識(shí)別與人工智能,2014,27(6):533-539.
[13]潘全科,高亮,李新宇.流水車(chē)間調(diào)度及其優(yōu)化算法[M].華中科技大學(xué)出版社,2013.
[14]Carlieb J.Ordonnancements à contraintes disjonetives[J].RAIRO-Operations Research-Recherche Opérationnelle.1978,12(4):333-350.
[15]Reeves C R.A genetic algorithm for flow-shop sequencing[J].Computers and Operations Research 1995,22(1):5-13.
Dual mode PSO for solving permutation flow shop scheduling problem
MA Yi-hang1,TAO Wen-hua1,LIU Yang2
(1.School of Information and Control Engineering,Liaoning Shihua University,F(xiàn)ushun 113000,China;2.Olefins plant of China Petroleum Fushun Petrochemical Company,F(xiàn)ushun 113009,China)
Our objective in this report is to study the permutation flow shop scheduling problem,this paper proposes a dualmode particle swarm optimization algorithm based on random key code.Based on the ROV rules for random code for the processing sequence;Secondly,particles in the search process use dual flight mode with the adaptive inertia weight to update the position and velocity,avoid particle swarm into premature convergence;In order to improve the quality of the solution,in each iteration the neighborhood local search algorithm is used on PSO optimized solution.Finally a comparison through numerical simulation and comparison of different PSO algorithm on the standard test set,to verify the feasibility and effectiveness of the proposed algorithm to solve the problem.
permutation flow-shop scheduling;particle swarm optimization;neighborhood search;random key
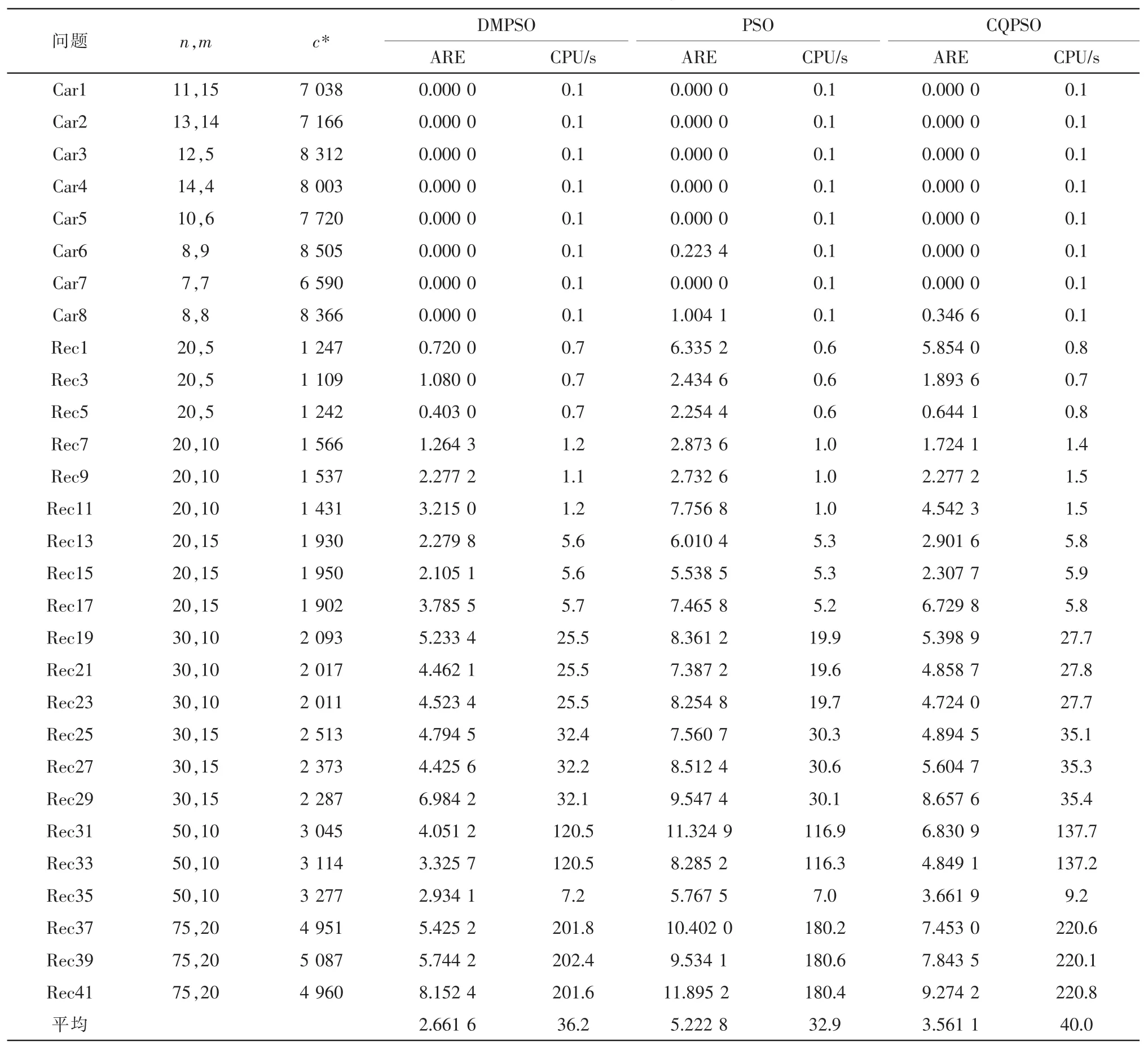
表2 仿真測(cè)試結(jié)果及比較
TN081
A
1674-6236(2016)15-0001-04
2016-01-08 稿件編號(hào):201601048
國(guó)家自然科學(xué)基金面上基金項(xiàng)目(61473140);國(guó)家自然科學(xué)基金青年基金項(xiàng)目(61203021)
馬祎航(1987—),男,遼寧沈陽(yáng)人,碩士研究生。研究方向:生產(chǎn)調(diào)度與智能優(yōu)化。
猜你喜歡
故事作文·高年級(jí)(2025年7期)2025-07-27 00:00:00
云南畫(huà)報(bào)(2021年8期)2021-12-02 02:46:08
文苑(2020年10期)2020-11-07 03:15:26
揚(yáng)子江(2018年1期)2018-01-26 00:36:54
天津詩(shī)人(2017年2期)2017-11-29 01:24:12
數(shù)位時(shí)尚(幼兒教育)(2017年6期)2017-07-18 11:47:56
視野(2015年6期)2015-10-13 00:43:11
六盤(pán)山(2015年3期)2015-06-29 12:26:37
火花(2015年1期)2015-02-27 07:40:13
海峽姐妹(2014年5期)2014-02-27 15:09:38