艦船 RCS 測試內外結合定標方法
2016-12-12 03:07:42李永新葉宗民
艦船科學技術 2016年11期
李永新,葉宗民
(中國人民解放軍 91404 部隊,河北 秦皇島 066000)
艦船 RCS 測試內外結合定標方法
李永新,葉宗民
(中國人民解放軍 91404 部隊,河北 秦皇島 066000)
針對艦船 RCS 測試的定標問題,討論從接收機前端注入標準微波信號或從發射機耦合發射功率輸入接收機前端的 2 種內定標方法,作為修正外場定標的依據。根據雷達方程分析外場定標 RCS 測量設備、標準體加工、目標跟蹤定位、測試區域環境等主要誤差因素。討論發射功率、系統非線性、系統穩定性、極化損耗等引入的誤差,提出外場定標對標準體幾何尺寸、表面光潔度以及所需信噪比等要求。通過內定標與外定標相結合的方法,解決由于定標與測試間隔時間過長接收機狀態出現漂移導致測試誤差的問題,保障艦船 RCS 長時間測試的精度和穩定度。
艦船 RCS;內定標;外定標;標準體
0 引 言
掠海水平方向測試艦船 RCS,是獲取艦船電磁散射特征信息的重要手段,是艦載雷達研制、性能評估的重要依據,用于支撐艦載雷達作用距離、海雜波抑制、目標識別等能力的設計和分析。艦載雷達在搜索、跟蹤海上目標時,雷達視線接近于掠海水平狀態,測試艦船在小入射余角、海背景條件下的雷達散射截面數據,需對雷達測試系統進行定標,確定測試系統的工作狀態,保證艦船 RCS 測量精度。
對雷達標定有 2 種方法,一是在雷達接收機前端注入信號,并改變幅度或相位檢測接收機的傳遞函數。接收機把所接收的信號與注入點的射頻功率相關聯。各種幅度只能通過改變信號振蕩器的輸出與雷達參數一起考慮,此種定標方法稱為內定標;二是利用已知標準體,用氣球或無人直升機將其帶到空中,使雷達天線的主軸瞄準己知標準體,測試已知目標后向散射特性,得出目標的 RCS 對接收響應的一組 K 值,此種定標方法稱為外定標。
1 定標方法
通過內定標、外定標 2 種方法,建立被測目標的
雷達散射系數與回波功率測量值的對應關系。
1.1 內定標
內定標方法有 2 種定標方式,其一,采用標準微波功率信號源作為定標設備,在接收機波導口面注入不同功率信號,對回波功率與注入功率之間關系曲線進行測試。其二,從發射機到天線的饋線中有一輸出耦合器,從天線到接收機的饋線中接有另一輸入耦合器。兩定向耦合器之間用標稱量的衰減器。檢驗接收機輸入功率與輸出功率比值是否發生變化。內定標原理框圖如圖 1 所示。
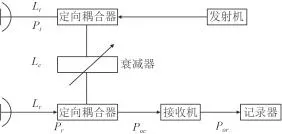
圖1 內定標原理框圖Fig.1 Calibration principle diagram
內定標基本方程為:

式中:Pr為接收功率,W;Pt為發射功率,W;Por為接收機的信號輸出功率,W;Poc為接收機的定標信號輸入功率,W;Lr為接收支路饋線損耗;Lt為發射支路饋線損耗;Lc為延遲線的衰減值;Ldcr為輸出耦合器的耦合度;Ldct為輸入耦合器的耦合度。
1.2 外定標
測試艦船 RCS 外定標通常采用相對比較法,先對標準體進行測量,測出標準體的回波功率 Pr0和距離R0,并監測測量雷達發射功率。由于標準體反射面積σ0為已知量,依據雷達方程求出系統定標系數 K外。
根據雷達方程,目標回波功率如下式:

式中:Pr為目標的回波功率,W;Pt為測試雷達發射功率,W;λ 為測試雷達工作波長,m;G 為測試雷達天線增益;σ 為目標的雷達散射截面,m2;R 為目標到測量雷達的距離,m。
在系統穩定的情況下,可以認為 λ、G 保持不變。對標準體測量由式(2)可得雷達外場定標系數,如式(3)所示。

1.3 內外結合定標
由于環境或客觀因素限制,實際測試艦船 RCS 過程中,雷達外場定標與艦船 RCS 測試不能同時進行,雷達定標與艦船 RCS 測試可能間隔很長時間(可能幾小時或幾天),測試艦船 RCS 時雷達發射功率、接收機狀態與外場定標時雷達狀態相比發生了變化,直接采用外場定標常數 K外1會引起較大測量誤差。需對外場定標常數 K外1進行修正,保障艦船 RCS 測量的準確性。
徦設測試艦船 RCS 時,外場定標常數為 K外2,同時采用發射機耦合功率方式對測試系統進行內定標K內2,測試艦船 RCS 與測試前 2 次外定標(K外1、K外2)與內定標(K內1、K內2)的關系如式(4)所示。

由式(4)得到式(5):

從式(5)可看出,假定在雷達定標與艦船 RCS測試期間,天線增益與雷達工作波長發生的變化可以忽略不計,雷達測試系統的變化只體現在發射功率與接收機狀態的變化。利用內外結合的定標方法,可以消除由于接收機狀態漂移所帶來艦船 RCS 測試誤差。
2 定標要求與步驟
2.1 內定標
內定標要求與步驟如下:
1)在測試前,采用標準微波信號注入法對接收機進行內定標。
2)采用的微波信號源準確度應高于回波信號功率測量準確度的 3~10 倍。
3)微波信號源的量程應大于測量雷達輸入信號的動態范圍。
4)在艦船 RCS 測試過程中,采用發射耦合信號、衰減器和饋線將功率信號饋到測量雷達高放前端。
5)給定功率源輸出值,利用雷達數據采集記錄系統,記錄接收機相應測量通道的輸出電平 Pr–Pt,并進行顯示監控。
6)改變功率值,重復步驟 5 作出 Pr–Pt校準曲線。
7)校準曲線應根據接收機線性度確定,至少包含12 個校準點。
8)采用式(7),通過 2 次內定標對接收機狀態漂移進行修正。
2.2 外場定標
2.2.1 外場定標要求
外場定標在自由空間使用空心金屬球作為標準體對雷達測試系統進行定標,具體要求如下:
3)定標球應滿足一定的升空高度,由標準體及環境干擾等引起的綜合定標幅度誤差應不大于 ± 1 dB。
4)標準體的定位誤差應控制在 0.3 dB 范圍內。
5)在定標過程中,對標準體累計信噪比必需高于20 dB。
6)外場定標曲線應由二點法確定,定標點應根據被測目標預計的 RCS 范圍選定。
2.2.2 標準體選擇
常用標準體有矩形平板、角反射器、龍泊透鏡反射器、金屬球等。表 1 中列出幾種標準體最大散射截面的計算公式。
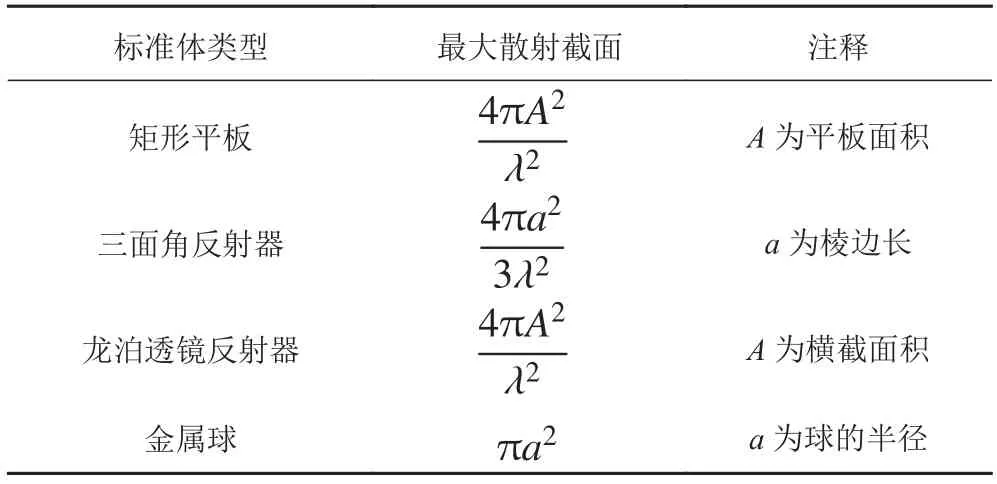
表1 常用標準體的特性Tab.1 Characteristics of commonly used standard
2.2.3 定標程序
RCS 外場測量采用相對比較法,通常用高空標準球作為定標體,標準金屬球系在距氫氣球 100 m 的位置處,然后將氣球升空。跟蹤雷達捕獲并跟蹤升空標準金屬球體,一般情況下標準球到雷達距離為600~1200 m,仰角為 10°~20°,同時記錄雷達測出標準體的回波功率 Pr0和距離 R0,并記錄測量雷達發射功率,由于標準體反射面積 σ0為已知量,根據式(3)求得外場定標常數。
1)利用探空氣球或風箏懸吊定標金屬球至一定斜距和高度后記錄回波信號電壓,并計算雷達校準常數K1。
2)測量系統對準標準體,并計算測量雷達校準常數 K2。
3)根據 K1、 K2的平均值 K = (K1+ K2)/2 作為外場定標系數。
4)按照預計的目標運動軌跡,測量測試區域背景電平的幅值。
定標曲線如圖 2 所示。
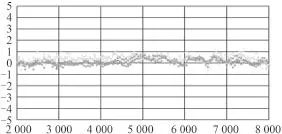
圖2 測量雷達定標曲線圖Fig.2 Measurement of radar calibration curve
2.3 內外定標相結合
內外相結合定標步驟如下:
1)測試系統開機加熱,待雷達發射功率、接收機系統穩定工作后,此時雷達天線與工作波長的變化可以忽略不計。
2)用發射機耦合功率輸入接收機前端,記錄發射功率 Pt和接收機功率 Pr,計算內定標比值 K內1。
3)按照外場定標程序對標準體進行定標,記錄發射機功率并根據雷達方程求出外場定標系數 K外1。
4)在測試艦船 RCS 時,用發射機耦合功率注入接收機系統,記錄發射機功率并計算內定標 K內2。
5)根據式(7)可求得內外合成定標系數 K外2,K外2作為測試艦船 RCS 的定標常數。
3 內外結合定標主要誤差因素分析
艦船 RCS 測試中,主要誤差因素包括測量雷達設備誤差、標準體加工誤差、目標跟蹤定位誤差等因素。
3.1 測量雷達設備誤差
在測試艦船 RCS 定標過程中,測量雷達的穩定性、精度、靈敏度、動態范圍等都會對測量結果產生重要的影響。因此從以下幾方面分析測量雷達設備誤差:
1)發射功率:發射功率檢波、放大電路的不穩定性。
2)系統非線性:復雜目標的動態 RCS 一般都具有非常大的動態范圍,所以接收機的線性范圍將對RCS 測量精度產生直接影響。
3)系統穩定性:即定標與艦船 RCS 測試時,接收機增益發生了漂移,導致定標系統常數發生變化。
4)射頻及中頻衰減器引入測量誤差。
5)極化損耗:如果 RCS 動態測量雷達沒有很好
的極化隔離,則交叉極化會引起較大的 RCS 測量誤差。
6)頻率漂移:由頻率漂移引起的 RCS 測量誤差。
7)發射機功率測量及接收機增益測量引入的測量誤差。
測量設備誤差如表 2 所示。
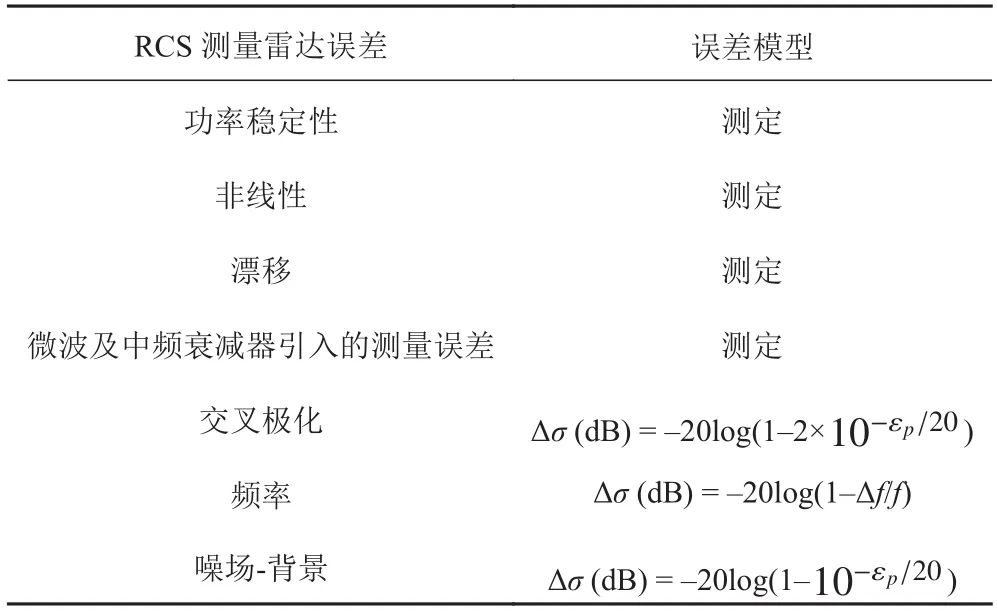
表2 RCS 測量雷達設備誤差模型表Tab.2 Table of error model of RCS measurement radar equipment
3.2 標準球加工精度引起的校準誤差
在光學區,理論上金屬球的 RCS 是各向同性的,但由于機械公差等因素的影響,球的規則性、表面的光潔度等方面都會存在一些問題,金屬球的誤差將對被測目標的 RCS 精度產生很大的影響,如表 3 所示。
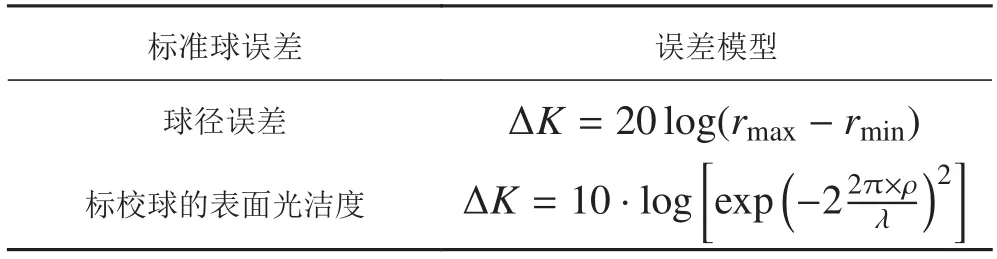
表3 標準球加工誤差模型表Tab.3 Table of standard ball machining error model
在艦船 RCS 測試過程中,通常采用直徑 φ = 300 mm標準金屬球作為標準體,其標準球的雷達截面積 σ = 0.07065 m2,轉換成對數為 σ = –11.5 dBm,圖 3 列出標準球微波暗室測試曲線。
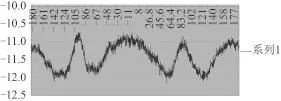
圖3 標準球暗室測試曲線Fig.3 The test curve of standard ball chamber
3.3 目標定位誤差
雷達對目標定位誤差引起的定標誤差為:

式中:2θ0為天線的 3 dB 波束寬度;θ 為最壞情況的指向誤差。
4 結 語
通過以上定標主要誤差因素分析,為了保障小入射余角條件下艦船 RCS 的測量精度和置信度,需對定標進行嚴格質量控制,具體措施如下:
1)嚴格監測雷達狀態,確保雷達狀態變化在可控范圍內,記錄發射機功率、極化隔離度、頻率、衰減器等參數,在定標過程中,接收機工作在線性范圍內,采用內外相結合的方法對接收的漂移進行校正。
2)標準體的幾何尺寸誤差和表面光潔度精度要滿足定標要求,在定標前,標準體必需經過微波暗室測量,確保定標精度。
3)在定標過程中,確保測量雷達對準標準體,使標準體在雷達 3 dB 波束范圍內。
通過以上分析,為了精確測試艦船 RCS,定標精度是關鍵,因此采用內外場相結合的方法,保障定標精度。
[1]黃培康, 殷紅成, 許小劍. 雷達目標特性[M]. 北京: 電子工業出版社, 2005: 112–114.
[2]黃培康. 雷達目標特征信號[M]. 北京: 宇航出版社, 1993: 223–239.
[3]何國瑜, 盧才成, 洪家才, 等. 電磁散射的計算和測量[M]. 北京: 北京航空航天大學出版社, 2006: 244–245.
[4]WELSH B M, LINK J N. Accuracy criteria for radar cross section measurements of targets consisting of multiple independent scatterers[J]. IEEE Transactions on Antennas and Propagation, 1988, 36(11): 1587–1592.
[5]SKOLNIK M I. 雷達手冊[M]. 南京電子技術研究所, 譯. 北京:電子工業出版社, 2010: 544–545, 566–567.
[6]莊釗文, 袁乃昌, 等. 雷達散射截面測量: 緊湊場理論與技術[M]. 長沙: 國防科技大學出版社, 2000: 7–8.
[7]航天工業總公司. 目標雷達散射截面數據格式要求: GJB 3830–1999[S]. 北京: 航天工業總公司, 1999.
[8]LANK G W. Radar measurement accuracy for fluctuating targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1991, 27(6): 868–870.
[9]國防科學技術工業委員會綜合計劃部. 測量不確定度的表示及評定: GJB 3756–99[S]. 北京: 中國人民解放軍總裝備部, 1999.
Methods of internal and extermal calibration for ship RCS testing
LI Yong-xin, YE Zong-min
(No. 91404 Unit of PLA, Qinhuangdao 066000, China)
This paper is aimed at the problem of ship RCS test calibration, discussed from the front end of the receiver injection standard microwave signal or form a transmitter coupled emission power input receiver two calibration principle and method, as a basis for the correction of external field calibration. According to the radar equation, the main error factors are analyzed, such as external calibration RCS test equipmentstandard body processingtarget tracking and positioningtest area environment and so on. The error of transmission powersystem nonlinearitysystem stabilitypolarization loss and so on are discussed. The standard sizesurface finishand the required signal to noise ratio of the external field calibration are proposed. Through the method of internal calibration and external calibration combination, solve the problem of test error caused by the deviation of the state of the receiver in the time of calibration and test, the accuracy and migration of the RCS long time test are guaranteed.
ship RCS;internal calibration;external calibration;calibration body
TN957.51
A
1672 – 7619(2016)11 – 0125 – 04
10.3404/j.issn.1672 – 7619.2016.11.026
2016 – 07 – 06;
2016 – 08 – 24
李永新(1962 – ),男,高級工程師,研究方向為目標電磁散射特性測量與建模。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年8期)2019-05-09 02:22:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2018年4期)2018-05-09 07:07:52
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
專用汽車(2016年4期)2016-03-01 04:13:43