PMSM 磁場定向控制設計
2016-12-12 03:07:42潘云蛟
艦船科學技術 2016年11期
關鍵詞:系統
黃 斌,潘云蛟
(昆明船舶設備研究試驗中心,云南 昆明 650010)
PMSM 磁場定向控制設計
黃 斌,潘云蛟
(昆明船舶設備研究試驗中心,云南 昆明 650010)
本文通過研究電機的驅動控制原理,建立仿真模型,分析和相應實驗說明,本文設計的控制策略可行。同時利用一種新方法尋找電機的初始角度和計算電機轉速,實驗結果表明該方案在水下航行體中具有啟動快和調速性能好。
永磁同步電動機;矢量控制;雙閉環系統
0 引 言
UUV 推進電機在前幾年由于電子元器件的發展不成熟,影響了控制的精度,多采用直流電機,而直流電機在結構上有換向器和電刷,該部分使得電機的結構龐大,電機使用時影響整個控制系統效率低。隨著電子元器件的發展成熟,控制算法也同樣發展,使得永磁同步電機替代直流電機作為動力輸入成為了一種趨勢[1]。目前還沒有人把這種和永磁同步電機結合的控制方法運用在水下航行體中,這一領域只是進行算法的理論研究,考慮電機的效率由電機本身的結構設計和控制器的控制算法所影響,所以需要注意2個方面:一是如何確定電機的結構設計達到了最優;二是設計出的電機需要和相應的控制器進行合理的匹配,以使整個驅動系統總的效率最大[2]。
1 系統控制策略
本文不以電機的結構設計為主,重點關注控制算法的實現。永磁同步電機控制系統由 TMS320F 28335作為主控部分,選用 IPM 為主驅動模塊,光電隔離電路部分,電流檢測和信號處理電路,保護電路構成。軟件算法程序通過 CCS 實現,TMS320F28335 控制芯片是目前已經使用比較成熟的2812芯片的升級。
2 PMSM 驅動系統控制策略實現
在 Matlab 2010a 中建立 Foc 控制系統(磁場定向控制)的 simulink 仿真模型,對控制算法的可能性進行驗證,在算法得到驗證的基礎上再進行代碼部分的編寫。
從圖1可看出,該控制系統采用雙閉環控制,給定的參考轉速是900rpm;速度通過 PI 調節模塊,實現轉速的閉環控制策略,該調節采用輸出限幅。接電流 PI 調節器模塊構成電流的閉環控制,輸出定子的電壓 dq 軸分量 ud和 uq;I-park 逆變器模塊將兩相旋轉直角坐標系(dq)下的值向兩相靜止坐標系(αβ)下變化,它的輸出是 αβ 軸的定子電壓分量參考值 Uα和 Uβ;SVPWM 和逆變模塊用于實現參考電壓逆變及其調
制,從而可以直接通給電機;PMSM 是永磁同步電機模塊,負載轉矩是模塊 Tm。反饋通道模塊為:Clark變換模塊:實現三相坐標系(ABC)向兩相靜止坐標系(αβ)的轉換,Parke 變換模塊:把兩相靜止坐標系(αβ)向兩相旋轉坐標系轉換(dq),從而實現復雜電機參數的解耦。所謂的磁場定向控制就是把電機的三相電流轉換為相互垂直的電流,而使其中一個電流為 0[3]。這樣通過控制另一個電流而控制電機的轉矩,用傳統直流電機的方法來控制交流電機,使得控制方法簡單。
永磁同步電機中的相電流值呈現正弦波,所以相應的控制系統要求相電流也是正弦波,通過 SVPWM來控制逆變器的6個功率管開合和關閉進而達到變頻的目的。相應的構成模塊有:扇區判斷、XYZ 計算、基本矢量時間分配、賦值模塊及 PWM 波形產生(見圖 2)。
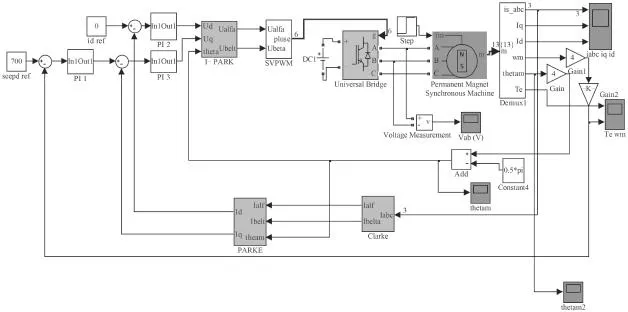
圖1 調速系統圖Fig.1Speed control system diagram
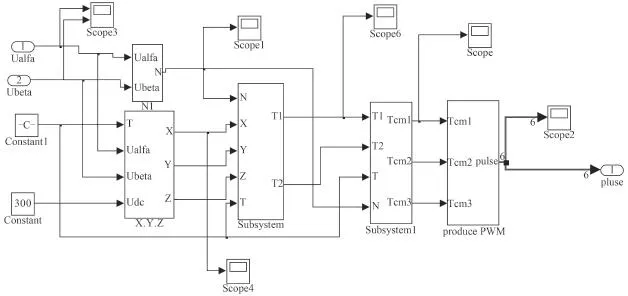
圖2 SVPWM 模塊仿真圖Fig.2Simulation diagram of SVPWM module
SVPWM 模塊通過 Ipark 變化輸出值 Ua,Uβ對逆變橋的6個功率管進行導通或者關閉來使得永磁同步電機的定子合成磁場與轉子磁場相互作用[4]。
PID 模塊的結構如圖3所示:PID 控制器工作機制是對閉環控制中誤差信號進行響應,嘗試對控制量進行調節,從而獲得期望的系統響應。被控參數可以是任何可測量系統量,本系統中的被控參數是轉速 id和 iq值[5],而實際使用時,由于考慮系統的相應速度在比例
和積分參數介入的情況下已經滿足要求,所以設計微分參數為 0。
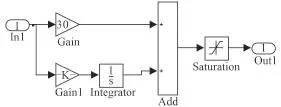
圖3 PI 控制算法原理結構圖Fig.3Structure chart of conventional digital PI control algorithm
3 系統軟件設計
通過輔助工具 ccs3.3,采用 c 代碼編寫控制程序,軟件計時和總體框圖如圖4所示。
電動機控制的中斷子程序是利用 ePWM1 作為中斷源,時基是由一個 PWM 下溢中斷的等待環(TBCTR = 0x0000 時產生事件),當定時器達到預設定時就會向CPU 提出中斷請求[6],當 CPU 響應中斷時,對永磁同步電機控制的一系列程序就會執行[7]。在此程序中采用以速度環為外環、電流環為內環的雙閉環控制系統,對電流和速度進行控制[8],其軟件流程如圖5所示。
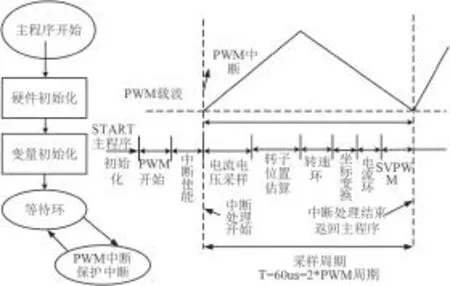
圖4 軟件總體流程圖及計時時序Fig.4Flow chart of software design and timing order
解決的幾個重要難點如下:
1)在 SVPWM 算法中把電機劃分成6個扇區,并在算法中給了1個參數 n,通過參數 n 就能知道電機合成磁場所在的扇區(見圖 6)。參數 n 與扇區之間的關系見表 1。
用手去旋轉電機,會發現參數的變化是 3,1,5,4,6,2 依次重復,可以對應 U3,U1,U5,U4,U6,U2。當電機在各種扇區時,會出現相應的比較值 Ta,Tb,Tc大于該比較值輸出高電平,然后通過此來判斷相應矢量的作用長度。動作輸出高電平還是低電平由AQCTLA 寄存器相應位來決定相應動作。在控制系統中取 7500 為計數器的最大值,TBCLK=2×7500 × 1/150 μs= 100 μs,f =10kHz,其中 150 是 dsp 的頻率 PWM 波形采用遞增與遞減格式,10 μs 是 isr 這個中斷進入的時間[9]。
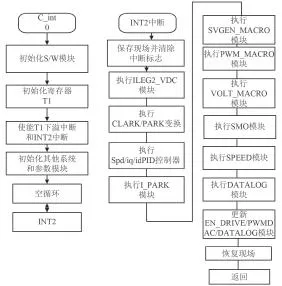
圖5 軟件流程圖(TMS320F281X 系列)Fig.5Software flowchart(TMS320F281x series)
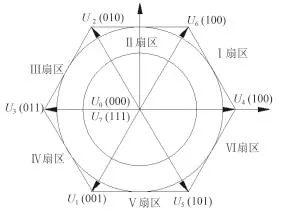
圖6 基本空間電壓矢量圖Fig.6Basic voltage space vector

表1 SVPWM 計算的參數 n 與扇區關系Tab.1relationship between n and sector in SVPWM

式中:T1為 pwm.periodmax;T 為周期,10 μs;f=10 kHz 為時鐘頻率。

式中 T2為 SYSTEM_FREQUENCY 寄存器時間,用的是系統寄存器計時時間,當計數到 0 時,發生中斷進入,時間是按照 150 ×5000/150 μs =5000 μs,約為 0.005 s時間。
2)電機初始角度即尋找電角度
如果多次實驗證明電機的初始角度有問題,電機就無法平穩運行。控制系統采用12位的旋變,精度為1/4 096 = 0.000 244 140 6。由此可知該精度完全可以達到推進系統的要求。360° 對應4096,一個周期是6個sector,19 對極電機1個電氣周期對應的編碼器是360/19 = 18.947°,屬于一個扇區 18.947/6 = 3.157 89°,對應的編碼器是 360°/4 096 × 3.157 89 = 36。電機的初始角度在 36 個編碼器數值內變動,即:19 對極,1 個電氣周期占的機械角 360/19 = 18.95,1 個 sector 占3.157 89°,對應12bit 為 36。機械角度是 P1–P0,P1是旋變反饋的當前位置數,P0是初始角度對應的編碼,360° 對應4096 輸出,令 X = (P1– P0)/4 096,P3是電機當前編碼器輸出值,P4是初始編碼器輸出值,電角度取得值是標幺值,P 是電角度的值,本電機是 19對極,由于電角度是機械角度的19倍,19 對極電機的電氣角度為:
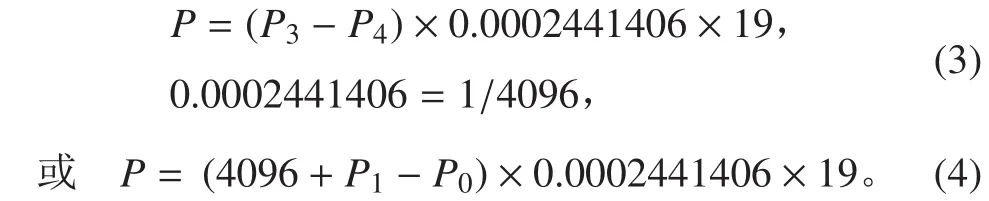
式(3)是電機正傳時的值,式(4)是電機反轉時的采樣計算值。
電機初始角的確定方法,在 SVPWMISR(void)中斷函數中設置:

這樣設定以后,給磁場一個固定的方向,讓電機的電流從 u 相流進,vw 相流出,此時給電機一個不大的電流,電機會被鎖定在一個固定的位置,電流給定后用手去旋轉電機的轉軸[6],找出 19 個固定位置并讀出相應的位置(19 對極電機有 19 個初始角度),電機相應的會被鎖定在19個位置,每個位置之間相隔36 個編碼數。通過實驗發現電機的初始角如圖7所示:
由圖7可知,1 個電氣周期對應的數是4096/19 = 215.57,由6個扇區構成,一個扇區為 35.929 8,首先看哪個扇區是正轉,哪個扇區反轉。再在正轉的扇區,找穩定的初始角度。初始實驗值從電機鎖定的幾個值對應的編碼器值來選取[10]。選取不同的角度作為初始角,進行對比后最終選擇出最合適的角度作初始角。
3)通過角度計算電機轉速
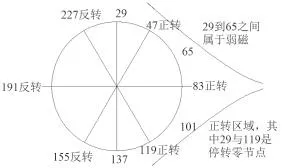
圖7 電機初始角圖Fig.7initial angle of motor
由于中斷函數時間設置為5ms 計算1次,此時電機反饋的編碼數是 n,1 s 對應200n,則算出電機的轉速為:

在 CCS 中的程序是:

對電機轉速進行濾波后:

4 實驗結果及分析
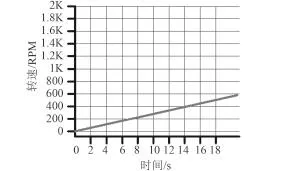
圖8 電機零速啟動圖Fig.8Motor starting speed wave
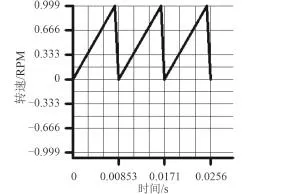
圖9電機角度圖Fig.9Motor angle wave
圖8 是電機從零速啟動, 圖9是電機的角度圖,通過 CCS 中的 DATALOG 模塊設置,就可以直接在 CCS
中繪圖,圖10電機在900rpm 時的轉速曲線,圖8~圖11是通過實際的物理實驗得到的真實數據,對相應電機進行 Simulink 仿真得到的數據進行對比。
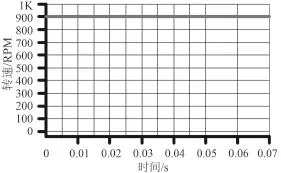
圖10 電機 900 rpm 時的轉速曲線Fig.10Speed wave on900rpm
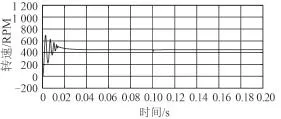
圖11 電機 450 rpm 的轉速曲線Fig.11Speed wave on450rpm
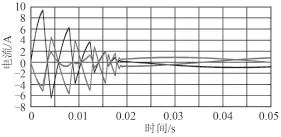
圖12 電機靜止三相電流Fig.12Motor’s stator three phase current
通過實驗和 Simulink 仿真分析可知,電機有較好的動態性能,穩態運行波動小,對于 UUV 推進電機而言完全滿足使用要求。
把工業中的控制方法運用在水下航行器同時用永磁同步電機提到直流電機做動力輸入是本文的創新點,用更簡單的方法尋找電機的初始角度并計算電機的轉速,節省了編寫復雜代碼的時間,對于處理器而言節省了程序的存儲空間,使得效率更高。
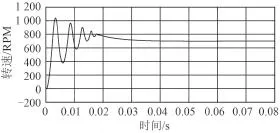
圖13 電機的速度曲線Fig.13Motor’s speed curve
[1]李剛. 數字信號微處理器的原理及其開發應用[M]. 天津: 天津大學出版社, 2000: 239.
[2]唐任遠. 現代永磁電機——理論與設計[M]. 北京: 機械工業出版社, 1997.
[3]李志民, 張遇杰. 同步電動機調速系統[M]. 北京: 機械工業出版社, 1996.
[4]程善美, 蔡凱, 龔博. DSP在電氣傳動系統中的應用[M]. 北京: 機械工業出版社, 2009.
[5]MATSUI N. Sensorless PM brushless DC motor drives[J]. IEEE Transactions on Industrial Electronics, 1996, 43(2): 300–308.
[6]VAS P. Sensorless vector and direct torque control[M]. Oxford: Oxford University Press, 1998: 122–154.
[7]LI L Y, CUI S M, ZHENG P, et al. Experimental study on a novel linear electromagnetic pumping unit[J]. IEEE Transactions on Magnetics, 2001, 37(1): 219–222.
[8]LI L Y, CUI S M, ZHENG P, et al. Experimental study on a novel linear electromagnetic pumping unit[J]. IEEE Transactions on Magnetics, 2001, 37(1): 219–222.
[9]HENKE M, GROTSTOLLEN H. Control of the NBP linear drive system[J]. Control Engineering Practice, 2002, 10(9): 1029–1035.
[10]KANG D H, CHUN Y H, WEH H. Analysis and optimal design of transverse flux linear motor with PM excitation for railway traction[J]. IEE Proceedings-Electric Power Applications, 2003, 150(4): 493–499.
Design of field-oriented controllers on PMSM
HUANG Bin, PAN Yun-jiao
(Kunming Shipbrone Equipment Research &Test Center, Kunming 650010, China)
This paper established simulation mode and through the study of the motor drive control principle, proveing the control strategy is feasible. A new method for seeking initial angle of the motor and the motor speed calculation, It shows that the scheme can effectively achieve stable control of the control system.
permanent magnet synchronous motor;FOC control;double loop system
TM32
A
1672 – 7619(2016)11 – 0133 – 05
10.3404/j.issn.1672 – 7619.2016.11.028
2016 – 05 – 10;
2016 – 06– 30
黃斌(1986 – ),男,碩士研究生,助理工程師,研究方向為能源與動力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32