國外艦船流場測試及可視化技術研究
2016-12-12 03:07:16梁云芳張國平吳鴻程
艦船科學技術 2016年11期
陳 虎,梁云芳,高 雷,張國平,吳鴻程
(中國船舶科學研究中心,江蘇 無錫 214082)
國外艦船流場測試及可視化技術研究
陳 虎,梁云芳,高 雷,張國平,吳鴻程
(中國船舶科學研究中心,江蘇 無錫 214082)
聚焦于國外流場測試及可視化技術發展現狀,分析精細流場測試在試驗室環境下及實尺度環境下的應用進展,總結艦船流場測試及可視化的關鍵技術,展望艦船流場測試及可視化技術發展趨勢。
流場測試;可視化;PIV;SPIV
0 引 言
流場是船舶運動最基本的力學環境。海洋中復雜海況和高海情引起的湍流、非定常流等耦合流動對艦船戰斗性能與生存能力會產生不良影響。深入揭示流場作用現象和流動細節、產生機理,對解決這些問題具有重要意義。傳統的船舶水動力學測試技術以模型試驗和宏觀測量為主,經過多年發展已較為成熟可靠。隨著研究的深入,船舶水動力學已越來越關注細觀流場的物理特性,流場信息可視化需求日益增長;同時,為更好地揭示流場在復雜環境下的流動細節,將測試技術由模型尺度拓展至實船尺度是國外重要的發展方向。本文聚焦于國外流場測試及可視化技術發展現狀,分析精細流場測試在試驗室環境下及實尺度環境下的應用進展,總結艦船流場測試及可視化的關鍵技術,并展望艦船流場測試及可視化技術發展趨勢。
1 國外艦船流場測試及可視化技術發展現狀
1.1 國外流場測試及可視化技術發展現狀
艦船流場測試的主要方法有畢托管測速,熱線/熱膜測速,激光多普勒及其相關技術測速,粒子圖像及其相關技術測速。表 1 比較了幾種常用的流動測試技術[1]。
傳統的測速技術如畢托管測速、熱線熱膜測速等都有部分介質直接介入流體中,或多或少地對所測流場產生干擾。隨著聲、光技術逐漸進入流動測試領域,無干擾的光學測量手段已經開始被廣泛應用于大型水動力試驗設施中艦船復雜流場的觀測和研究。其中,LDV 作為一種較為成熟的流場測試手段已經被廣泛應用。但是在湍流、三維流動、多平面或者多相流測試領域,LDV 單點測量的局限性限制了其應用。
PIV 是 20 世紀 80 年代發展起來的一種瞬態、多點、無接觸式的流體力學測速方法[1]。PIV 技術克服了單點測速技術的局限性,實現了在同一瞬態時刻記錄大量空間點上的速度分布信息,可提供豐富的流場空間信息及流動特性。PIV 技術可選擇粒子濃度使其成為較高成像密度模式,在 PIV 技術實現過程中,由于其應用激光光源照亮流場待測區域,應用照相系統對待測流場區域進行圖像采集,在整個測試過程中所有測量裝置均對流場不產生擾動,故 PIV 技術具有較高的測量精度。
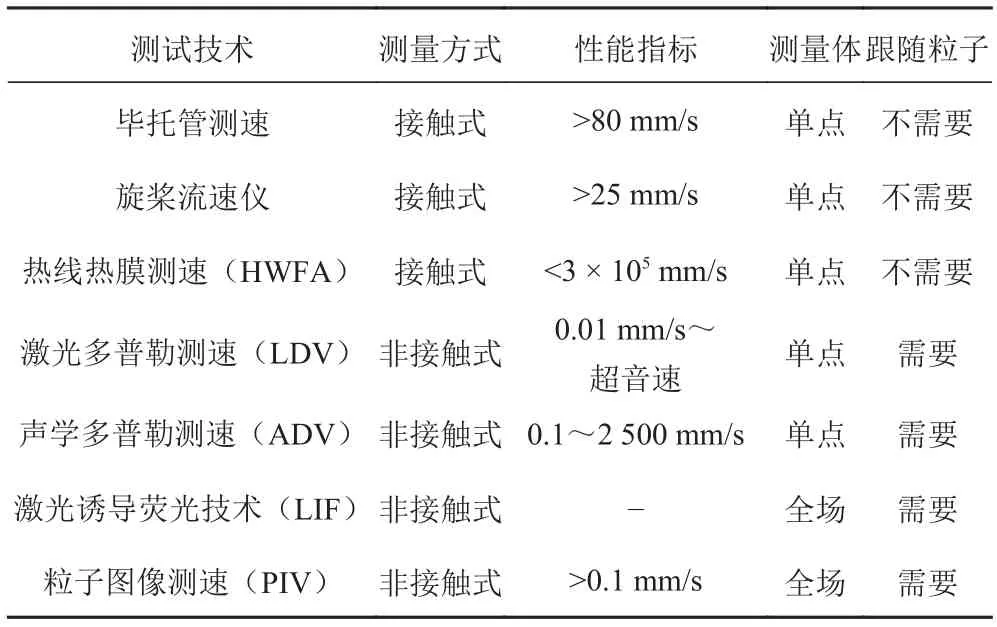
表1 常用的流動測試技術的比較Tab.1 Comparison of flow measurement techniques
最早的水下 PIV 系統,多為半浸式的 PIV 系統[2],隨著測試和研究需求的不斷增加,這種結構形式的水下 PIV 系統已經不再靈活和適用。越來越多的國外試驗機構開始與 PIV 公司共同研發更為專業和便利的水下三維 PIV 系統。三維粒子圖像測速(SPIV)系統采用立體數碼照相技術,即采用多臺 CCD 相機從不同方位記錄被照明流場的一個剖面,通過事先設定的算法獲得流場的速度場和壓力場等。SPIV 作為一種先進的流場測試手段已經在模型試驗中得到了一定的應用,尤其對于三維流場的測量,SPIV 是目前公認精確度比較高的技術。
現有的 SPIV 技術可按照光源對流場的照明方式分為兩大類:一是對某個切面內三維速度的測量(2D-3c PIV,片光照明);二是測量某個容積內體流動的三維速度(3D-3c PIV,體積光照明),實現真正意義上的全場三維 PIV。3D-3c 體 PIV 技術[3]的出現標志著流場測量由平面測量向體測量發展的趨勢,即進行非定常、空間、多參量、非接觸、全局的測量,而且正在逐步得到廣泛應用。其他新出現的前沿技術包括全息粒子圖像測速技術(HPIV),三維粒子跟蹤測速技術(3D-PTV),層析粒子圖像測速技術(TPIV)等。但是此類技術和設備的復雜性很強,許多關鍵技術必須予以解決。
國外艦船流場測試研究的主要機構有意大利船模水池(INSEAN)、美國海軍水面戰中心卡德洛克分部(NSWCCD)、美國愛荷華大學水利科學研究所(IIHR)、荷蘭水池(MARIN),挪威水池(MARINTEK)、巴黎水池(BEC),英國奎奈蒂克(QinetiQ)等。它們都建立了各自的流場測試試驗設施,并掌握了一定的測試技術和研究能力。除了在各自的水動力設施中進行試驗和研究,還開展了廣泛的國際合作。
2002 年,BEC,INSEAN,MARIN,QinetiQ 開展了一項跨國合作項目,完成了 2 艘水面艦艇(荷蘭護衛艦 De Ruyter 和北約研究船 Alliance)模型標稱伴流和尾流場的測量,同時還應用激光多普勒測速儀(LDV)完成了對實船某一剖面螺旋槳進流的測量[4]。BEC 負責在水動力水池進行水面船和潛艇的模型試驗;QinetiQ 負責對拖曳水池、水筒和實船試驗中得到的數據進行 CFD 驗證,得到更適合的代碼和湍流模型;INSEAN 負責拖曳水池模型試驗和現有代碼的湍流模型應用和評估;MARIN 負責準備實船試驗測量設備和進行實船試驗。2002 年意大利和美國海軍開展了一項聯合研究項目,計劃通過模型試驗和實船試驗來探究水面艦船舭龍骨處的粘性流場。2004 年,項目參與機構 INSEAN,IIHR 和 NSWCCD 合作完成了橫搖狀態下復雜表面船舶粘性水動力特征試驗[5]。3 家機構均選用加裝舭龍骨的 DTMB 5415 船模為研究對象。INSEAN 負責完成不同航速下單自由度橫搖衰減的 LDV測量;IIHR 負責完成波形測量和 PIV 測量;NSWCCD負責完成 PIV 測量以及力和力矩的測量。最終得出了舭龍骨處流動細節的 PIV 試驗結果與 CFD 計算結果,并將二者進行對比,結果表明 PIV 試驗結果能夠真實反映舭龍骨處的流場流動細節,試驗結果具有可靠性。
艦船研究領域普遍的流場信息可視化應用包括船體壓力場、極限型線、伴流場及船舶周圍動態速度矢量等。2006 年,MARIN,SSPA 和 INSEAN 等機構開始了一項國際性合作項目“流場信息分析和可視化”,目標是優化試驗獲得的龐大數據群分析的質量和效率,優化試驗流場數據群在數值工具驗證和標定中的應用。使用的可視化工具包括 Tecplot,CFX5post,Matlab和 Fieldview。圖 1 顯示了使用 Fieldview 和 CFX5post得到的 3D 視圖。
經過十幾年的飛速發展,國外流場測試主要試驗機構已形成一定的試驗能力,可以在水動力設施如拖曳水池、空泡水筒、循環水槽等開展常規性模型試驗研究。除了上述提到的研究機構外,荷蘭 MARIN 水池從 2009 年開始在深水拖曳水池使用丹麥丹迪動態公司(DANTEC)的 SPIV 系統,進行伴流場、全 3D 船體、推進器精細流場、渦激振動測量等試驗項目;美國泰勒水池(DTMB)在減壓水池中建立了 1 套 PIV系統以測試螺旋槳周圍流場,另外還在大型拖曳水池中建立了 1 套采用 6W 氬離子連續激光器作光源的PTV 系統,利用該系統對水下潛艇模型的指揮臺-艇體結合部流動結構進行測試研究;美國愛荷華大學在拖
曳水池建立了隨車式 PIV 系統,可測量 3 個互相垂直的截面,最大測量區域可達 20 cm × 20 cm,每次拖曳可獲得與處理 250 幅矢量圖,該系統實現了實時在線處理。
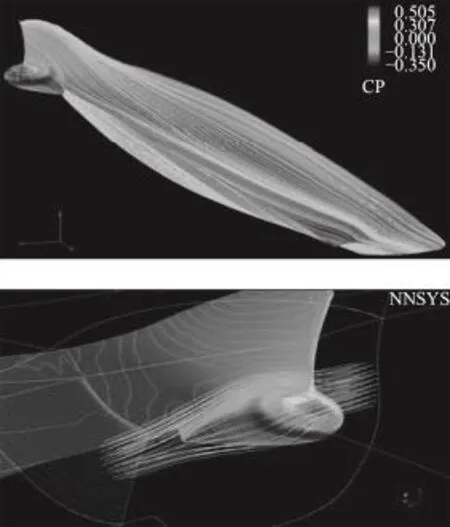
圖1 船體的壓力分布和跡線圖Fig.1 Hull pressure distributions and streamlines
1.2 模型尺度下流場測試及可視化技術應用現狀
國際拖曳水池會議(ITTC)從第 25 屆大會開始成立了精細流場測試專家委員會,組織世界各國致力于流體力學基礎研究的專家、學者開展深入研究,評述當今船舶水動力學領域應用的流場測試系統及其方法,描述粒子圖像測速技術(PIV)、三維粒子圖像測速技術(SPIV)、激光多普勒測速技術(LDV)、粒子跟蹤測速技術(PTV)及其他技術在船舶流場測量中的應用。從第 25 屆 ITTC 以來,經過幾年的發展,艦船流場測試領域逐步拓展,測試技術也不斷提高。
1)精細流場測試應用于船舶螺旋槳附近流場研究[6]
船體周圍的流場是三維流動的,流場介質存在粘性,因此船舶繞流的分析十分復雜,這種復雜性體現在船舶尾部流動和伴流場中。而在船用螺旋槳設計中,船體尾部伴流場分布的精確預報更是螺旋槳成功設計的前提。國際上精細流場測試應用最多的即是船后螺旋槳尾流研究。表 2 列出了從 2000 年至今國際上精細流場測試應用于船舶螺旋槳及船后舵的研究概覽。
研究表明 PIV 是一種直接獲得船舶精確繞流場的優良手段,已被廣泛應用于船舶尾部伴流場測量,尤其適用于非定常流場結構的全局瞬時測量,獲得的定量信息可以為船舶尾流場復雜流動現象的揭示提供幫助[17]。LDV 作為一種具有較高測量精度和分辨率的測試手段已被廣泛應用,同時 SPIV 也開始逐步得到應用。
2)精細流場測試應用于船舶水動力學和船舶干擾流動
船舶橫搖誘導的流場流體動力特征十分復雜。水面船的橫搖運動輕微衰減和輕微再生,由于粘性現象
如舭龍骨的渦分離,導致很難預測。
2004 年,INSEAN,IIHR 和 NSWCCD 三家機構合作完成了橫搖狀態下復雜表面船舶粘性水動力特征試驗[5]。3 家機構均選用加裝舭龍骨的 DTMB 5415 船模為研究對象。試驗中,INSEAN 負責完成不同航速下單自由度橫搖衰減的 LDV 測量,測試區域選在 8 個不同剖面;IIHR 負責完成波形測量和 PIV 測量;NSWCCD負責完成 PIV 測量以及力和力矩的測量。圖 2 所示為橫搖阻尼水動力試驗裝置示意圖。最終得出了舭龍骨處流動細節的 PIV 試驗結果與 CFD 計算結果,并將二者進行對比。圖 3 所示為舭龍骨橫搖狀態下的流動細節結果,圖 3(a)為 CFD 計算結果,圖 3(b)為 PIV試驗結果。對比 2 圖可看出,PIV 試驗用于船舶橫搖阻尼水動力特征研究可行,其測量精度符合設計要求,試驗結果能夠比較真實地反映流場的流動特征。
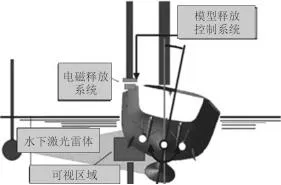
圖2 橫搖阻尼水動力試驗裝置示意圖Fig.2 Experimental set-up of roll damping hydrodynamic test
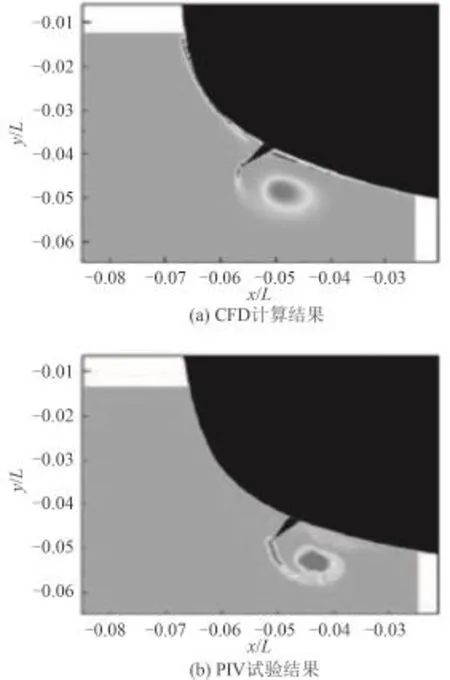
圖3 舭龍骨處橫搖狀態下的流動細節對比Fig.3 Comparison of flow details at bilge keel in rolling motions
3)精細流場測試應用于海洋工程和自由面流動
當一個結構如立管受到海流沖擊,近伴流場的渦流發散導致振動橫向力,從而誘導渦激振動。最近幾年,PIV 測試開始應用于橫流的自由懸浮圓柱段的性能研究。巴西 COPPE 水池的費爾南德斯等[18]于 2012年將 PIV 應用于渦自激振動(VSIV)的研究,其中結構的縱向運動能誘導橫向振動,此現象區別于渦激振動(VIV)。阿斯蘭(Arslan)等[19](2012)綜合采用CFD 和 PIV 研究繞半潛式矩形圓柱體的流場。
2012 年,斯坦斯伯格(Stansberg)等[20]在挪威MARINTEK 的大型波浪水池進行了一項 PIV 試驗以測量破碎波的近表面運動。采用 PIV 測量破碎波的速度場,聚焦于氣水分界面,通過仔細調節流體和示蹤粒子的照明,結合 PIV 后處理方法,可以在 200 Hz 采樣頻率下測量破碎波的局部速度場。結果顯示采用 PIV測量破碎波的運動學可行,但技術仍需進一步提高。圖 4 顯示了破碎波中近表面速度場 PIV 測量結果。

圖4 破碎波中近表面速度場 PIV 測量Fig.4 PIV measurements of near-surface velocity field in breaking wave
2012 年,奧利維拉與費爾南德斯合作開展了海上浮式生產儲油船(FPSO)的橫搖阻尼研究[21],其中繞船體和舭龍骨周圍發散的渦流對橫搖阻尼起到決定性作用。在不同吃水、初始橫搖角、舭龍骨寬度和橫搖回轉半徑條件下開展試驗,對 FPSO 橫截面區域進行PIV 測量。試驗中可視化方法的應用有助于更好地進
行不確定性分析和渦性能研究。2013 年里約聯邦大學的艾瓦洛思(Avalos)等[22]開展了 CFD 研究,結果與奧利維拉等 2012 年的試驗數據相吻合。
1.3 實船尺度下流場測試及可視化技術應用現狀
盡管模型試驗技術不斷進步,實船試驗的報道仍然較少。作為一項起始于 2002 年的國際性合作項目的一部分,NSWCCD,IIHR 和 INSEAN 三家機構于 2007 年在意大利軍艦“內維貝蒂卡”號(Nave Bettica)上運用 PIV 技術進行了舭龍骨處粘性流場的實船試驗研究,這是第 1 次將 PIV 技術運用到實船試驗研究中[23]。
為避免影響試驗操作,PIV 設備的安裝選在干船塢期。圖 5 所示為試驗裝置示意圖。除了收集 PIV 圖像,使用數據處理計算機(裝有 Labview)收集所有20 Hz 采樣頻率下的數據。計算機記錄下了舭龍骨應力、船舶運動、GPS 速度和方向、PIV 同步信號等。使用 LN200 纖維光學陀螺儀測量船舶運動的 6 個平面。為了確保水中有足夠微粒以顯示清晰的 PIV 圖像,還安裝了一個粒子示蹤系統。選擇的示蹤粒子是硅藻土,尺寸大約 100 μm。試驗最初計劃采用 SPIV,最終試驗時為了降低風險和成本,采用了帶一個相機的 2D-PIV。

圖5 “內維貝蒂卡”號試驗裝置示意圖Fig.5 PIV equipment installed on the outer hull of the Nave Bettica
圖 6 所示為 PIV 試驗結果,圖 3(a)為航速 12.8 kn,T = 0 s 時舭龍骨處靜水橫搖衰減試驗的 PIV 試驗結果,圖 3(b)為航速 12.8 kn,T = 8 s 時的試驗結果。可見水流和舷向的變化。
本次實船試驗的主要目的是通過收集 PIV 數據來研究粘性流場。為了解整體流場和相關力,也對舭龍骨側力進行應變儀測量。其他收集的數據包括局部環境的測量(波浪和風),船舶運動和船舶穿水速度等。實船試驗與模型試驗數據的比較進一步揭示了粘性橫搖阻尼水動力現象的尺度效應。本次試驗中采用的試驗技術也代表了試驗工具的重要應用,驗證了在復雜環境下的 PIV 應用。與橫搖阻尼現象的揭示同樣重要的是,掌握了這些測試手段在實船試驗中的優勢和劣勢,有利于船舶水動力學領域試驗技術的未來發展。

圖6 PIV 試驗結果Fig.6 PIV test results
2 艦船流場測試及可視化的關鍵技術
2.1 示蹤粒子選取、照明布置及圖像處理技術
示蹤粒子是獲取流場圖像的基本手段,為使粒子運動真實反映流場運動,其直徑、密度、形狀、光反射性能等性能指標都有系列要求,而流動特性對粒子性能的要求也有所區別。因此,需要建立方法體系,對示蹤粒子的選取規定方法、建立評價標準。
示蹤粒子布撒到流場中后,必須進行照明方可被攝像機記錄。照明光線的強度、方向等控制條件,必須同時滿足示蹤粒子、成像傳感器(CCD 或CMOS)的匹配要求,考慮整體優化性能。
當得到流場圖像后,PIV 在本質上轉化為圖像處理技術。經過相機標定、濾波等預處理后,通過粒子匹配算法獲得粒子在像平面上的位移,進而計算出粒子的運動速度矢量分布。計算粒子在圖像上的位移是
最關鍵的環節,也是 PIV 研究的難點。最早采用光學楊氏條紋法、自相關法等來匹配粒子圖像,目前一般采用互相關法處理粒子圖像。
2.2 SPIV 應用于大型水動力試驗設施
SPIV 是目前公認精確度比較高的技術,但其應用于大型水動力試驗設施存在諸多尚待突破的技術問題,尤其是表現在拖曳水池拖車上安裝、滿足與船模同步前進要求等方面。例如:雖然能夠滿足艦船模型舷側處水流流場測試需求,但是較難滿足艦船底部、乃至軸支架內側等區域流場測試要求;滿足艦船橫剖面流場測試要求,較難滿足縱剖面或水線面測試要求;針對潛艇等水下航行體,SPIV 設備浸深不夠,限制了流場測量有效區域,甚至有可能引起對測量精度的不利影響。另外,CCD 以及激光發射器件位于雷體之內,在試驗過程中,隨著拖車一起前進,由于雷體形狀、浸深較淺等因素,導致超過某一試驗速度之后,雷體上產生大量空泡,導致試驗無法進行。
2.3 實船測試結果一致性控制技術
試驗結果的一致性包括同一對象不同時期開展試驗結果應保持一致,在不同海域開展試驗結果應保持一致,或者當結果出現不一致,能夠采取有效的方法,將計算結果外推或修正至一致。試驗結果一致性是證明試驗可靠性、有效性的基本、必要條件。
實船試驗中環境條件難以始終保持一致,包括海況、海流、風向等;控制條件也較難一致,例如航速、螺旋槳轉速等;且人為因素對實船流場測量影響結果較大。以上是實船流場測試一致性控制的三大難點。
2.4 流場測量結果處理技術
目前的流場可視化工具和系統能有效對流場數據進行可視化處理與分析,但是可視化功能主要側重于二維數據分析,如等值線、流線、顏色映射等,三維可視化功能不強。如今三維復雜流動可視化應用需求日益增長,對現有的流場數據可視化處理軟件提出了更高的要求。提高大規模流場測試數據高精度、高效率可視處理與分析能力,是流場信息可視化的迫切要求。
3 艦船流場測試及可視化技術發展趨勢
3.1 從平面測量向體測量發展
當前的許多課題以三維流動為研究對象,以全局、瞬時、定量、三維流場顯示為目標,單純的平面測量已不能滿足三維復雜流場的需求,因而迫切需要深入開展三維 PIV 研究[24],以更好地揭示流場內部復雜的空間結構,更深刻地反映流場的流動機理。如何使 PIV 設備一體化、靈活化和人性化,研制多方位測量的高精度 SPIV 系統,從平面測量向體測量發展,以及與之相對應的后處理分析,不確定度分析等,將是未來流場測試及可視化技術發展的重要方向。
3.2 模型試驗常規化
從國外的經驗來看,試驗室環境下艦船流場測試已經形成一定的試驗能力,解決了精細流場測試的手段。但是開展此類試驗,需要準備周期長,標定與校驗復雜,成本高昂,尚屬于非常規試驗。如何使模型試驗常規化,裝置小型化與集成化,安裝模塊化,提高試驗效率,降低試驗成本,并保證足夠的測量精度和準確度,是試驗室環境下流場測試手段的重要發展方向之一。
3.3 從模型試驗向實船試驗發展
國外依托水池實驗室,以船模為目標對象的流場測試技術逐步成熟,以此為基礎,逐步增加了實船流場測試的研究工作。該類測量直接服務于實船尺度,得到的試驗資料價值很大,為從模型尺度建立起外推至實船的預報方法,打下堅實基礎。此類試驗技術難度大、周期長、費用高,環境影響因素多,試驗一致性、測試準確性較難保證,既是流場測試及可視化技術重要發展方向,也是難點。
3.4 與計算流體力學結合成為推廣方法
近年來計算流體力學(CFD)成為一種優良的輔助測試手段并被廣泛采用。一方面,國外許多在研流場測試項目,是為計算流體力學(CFD)提供“校驗”數據;另一方面,CFD 方法的引入,能夠提前對模型試驗結果進行定性預估,并用于解釋流場精細測量的一些爭議性問題。充分利用 CFD 的優勢,并將其與 PIV 試驗相結合,將使 PIV 的發展提升到新的層次。
隨著艦船測試設備硬件的不斷革新,計算機技術、激光技術的不斷發展,以及后處理算法的不斷優化,測試精度會不斷改善,艦船流場測試及可視化技術將在可預見的未來有更大的進步。
[1]唐洪武. 現代流動測試技術及應用[M]. 北京: 科學出版社, 2009.
[2]張國平, 張軍, 陸林章, 等. 拖曳水池水下三維PIV測試系統研究[C]. //第九屆全國水動力學學術會議暨第二十二屆全國
水動力學研討會文集. 北京: 中國力學學會, 2009. ZHANG Guo-ping, ZHANG Jun, LU Lin-zhang, et al. Underwater stereo-PIV system in towing tank[C]. //Proceedings of 9th National Academic Conference on Hydrodynamics and 22nd National Symposium on Hydrodynamics. Beijing: Chinese Society of Theoretical and Applied Mechanics, 2009.
[3]The Specialist Committee on Detailed Flow Measurement. Final report and recommendations to the 26th ITTC[C]//Proceedings of 26th ITTC. Rio de Janeiro, Brazil: ITTC, 2011.
[4]BULL P, VERKUYL J B, RANOCCHIA D, et al. Prediction of high Reynolds number flow around naval vessels[C]//Proceedings of 24th Symposium Naval Hydrodynamics. Fukuoka, Japan, 2002.
[5]The Specialist Committee on Scaling of Wake Field. Final report and recommendations to the 26th ITTC[C]//Proceedings of 26th International Towing tank Conference. Rio de Janeiro, Brazil: ITTC, 2011.
[6]The Specialist Committee on Detailed Flow Measurement. Final report and recommendations to the 27th ITTC[C]//Proceedings of 27th International Towing tank Conference. Copenhagen, Denmark: ITTC, 2014.
[7]LEE S J, PAIK B G, LEE C M. Phase-averaged PTV measurements of propeller wake[C]//Proceedings of the 24th Symposium on Naval Hydrodynamics. Fukuoka, Japan, 2002.
[8]FELLI M, DI FELICE F, GUJ G, et al. "Analysis of the propeller wake evolution by pressure and velocity phase measurements"[J]. Experiments in Fluids, 2006, 41(3): 441–451.
[9]STELLA A, GUJ G, DI FELICE F. Propeller wake flowfield analysis by means of LDV phase sampling techniques[J]. Experiments in Fluids, 2000, 28(1): 1–10.
[10]PAIK B G, KIM J, PARK Y H, et al. Analysis of wake behind a rotating propeller using PIV technique in a cavitation tunnel[J]. Ocean Engineering, 2007, 34(3/4): 594–604.
[11]FELLI M, FALCHI M, PEREIRA F, et al. Dynamics of the propeller wake structures interacting with a rudder[C]//Proceedings of the 28th Symposium on Naval Hydrodynamics. Pasadena, USA, 2010.
[12]MIORINI R L, WU H, TAN D, et al. Flow structures and turbulence in the rotor passage of an axial waterjet pump at offdesign conditions[C]//Proceedings of the 28th Symposium on Naval Hydrodynamics. Pasadena, USA: Office of Naval Research, 2010.
[13]MUSCARI R, FELLI M, DI MASCIO A. Analysis of the flow past a fully appended hull with propellers by computational and experimental fluid dynamics[J]. Journal of Fluids Engineering, 2011, 133(6): 061104.
[14]MUSCARI R, FELLI M, DI MASCIO A. Analysis of the flow past a fully appended hull with propellers by computational and experimental fluid dynamics[J]. Journal of Fluids Engineering, 2011, 133(6): 061104.
[15]PAIK B G, KIM K S, MOON I S, et al. Experimental study on the vortical flow behind 2-D blade with the variation of trailing edge shape[J]. Journal of the Society of Naval Architects of Korea, 2011, 48(3): 233–237.
[16]PECORARO A, DI FELICE F, FELLI M, et al. Propeller-hull interaction in a single-screw vessel[C]//Proceedings of the 3rd Symposium on Naval Propulsion. Launceston, Tasmania: Delft University of Technology, 2013.
[17]郭隆德. 風洞非接觸測量技術[M]. 北京: 國防工業出版社, 2013.
[18]FERNANDES A C, SEFAT S M, CASC?O L V, et al. Analysis of PIV tests results of the vortex self induced vibration (VSIV) of a cylinder[C]//Proceedings of the ASME 201231st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil: SAME, 2012.
[19]ARSLAN T, MALAVASI S, PETTERSEN B, et al. Experimental and numerical study of the flow around a semi-submerged rectangular cylinder[C]//Proceedings of the ASME 201231st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil: ASME, 2012.
[20]STANSBERG C T, BERGET K, GRACZYK M, et al. Breaking wave kinematics and resulting slamming pressures on a vertical column[C]//Proceedings of the ASME 201231st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil: ASME, 2012.
[21]De OLIVEIRA A C, FERNANDES A C, GUIMAR?ES H B. The influence of vortex formation on the damping of FPSOs with large width bilge keels[C]//Proceedings of the ASME 201231st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil: ASME, 2012.
[22]AVALOS G O G, WANDERLEY J B V, FERNANDES A C. Roll damping decay of a FPSO with bilge keel[C]//Proceedings of the ASME 201231st International Conference on Ocean, Offshore and Arctic Engineering. Rio de Janeiro, Brazil: ASME, 2012.
[23]ATSAVAPRANEE P, ENGLE A, GRANT D J, et al. Fullscale investigation of viscous roll damping with particle image velocimetry[C]//Proceedings of the 27th Symposium on Naval Hydrodynamics. Seoul, Korea: Office of Naval Research, 2008.
[24]李思昆, 蔡勛, 王文珂, 等. 大規模流場科學計算可視化[M].北京: 國防工業出版社, 2013.
Research development on ship flow measurement and visualization
CHEN Hu, LIANG Yun-fang, GAO Lei, ZHANG Guo-ping, WU Hong-cheng
(China Ship Scientific Research Center, Wuxi 214082, China)
In this paper, the state-of-the-art of overseas’ researches on ship’s flow measurement and visualization are re-viewed, and the application of detailed flow measurement in laboratory and full scale environments are summarized. The key technologies of flow measurement and visualization, as well the development trends of ship flow measurement and visualization are further analyzed.
flow measurement;flow visualization;PIV;SPIV
U661.1
A
1672 – 7619(2016)11 – 0001 – 07
10.3404/j.issn.1672 – 7619.2016.11.001
2016 – 04 – 01
陳虎(1957 – ),男,副研究館員,主要從事國外艦船裝備與技術情報研究工作。
猜你喜歡
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
傳媒評論(2019年4期)2019-07-13 05:49:14
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45