多模饋源跟蹤雷達幅相一致性標定研究
2016-12-16 04:29:08陳鳳友石一鳴
現(xiàn)代雷達 2016年11期
陳鳳友,石一鳴
(解放軍91550部隊, 遼寧 大連 116023)
?
·天饋伺系統(tǒng)·
多模饋源跟蹤雷達幅相一致性標定研究
陳鳳友,石一鳴
(解放軍91550部隊, 遼寧 大連 116023)
以前的脈沖跟蹤雷達幅相一致性標定過程繁瑣、標定環(huán)境受限。多模自跟蹤雷達建立了天線偏離角與輸出角偏差信號大小關系的數(shù)學模型,通過獲取被跟蹤目標相對天線角度變化值以及角偏差電壓變化值,形成了幅相一致性標定的新方法,對提高幅相標定效率、克服標定環(huán)境局限性等具有重要的應用價值。
多模自跟蹤;幅相一致性;S曲線
0 引 言
在脈沖跟蹤測量雷達中,為實現(xiàn)和保證伺服系統(tǒng)完成對目標角度的穩(wěn)定跟蹤,跟蹤接收機的和差差三通道必須滿足幅相一致性標定的要求[1]。對于靶場雷達,之前使用的幅相一致性標定方法首先需要在跟蹤點目標標定時通過對方位和俯仰分別拉偏來實現(xiàn),操作干預多、過程繁瑣;其次,作為放球試驗來講受天氣等因素的制約,如若天氣條件不好,放球試驗的效果將不能標定和驗證,甚至無法進行跟蹤點目標標定試驗。對于多模饋源的脈沖跟蹤測量雷達,建立偏離角與跟蹤角偏差信號提取關系的數(shù)學模型,研究幅相一致性標定的新方法,對縮短幅相標定時間、提高效率、克服標定天氣等環(huán)境局限影響等具有重要的使用價值[2]。
1 三通道接收機幅相一致性標定原理
在卡式天線結構中,多模饋源作為高增益聚集天線的初級輻射器,為主天線提供有效的照射,因而被看成天線的心臟。典型三通道靶場單脈沖跟蹤測量雷達的接收機三個通道分別為和通道、方位差通道、俯仰差通道,為保證接收機三個接收通道的幅度及相位的一致性要求,通常的做法是對接收通道進行幅/相補償,基本方法是把和通道作為比較基準,將方位差通道和俯仰差通道的幅度及相位數(shù)值分別補償?shù)脚c和通道一致[3-5]。因兩個差通道一樣,以一個差通道為例,設和通道數(shù)據(jù)為ΣI+jΣQ,差通道數(shù)據(jù)為ΔI+jΔQ,差通道信號經(jīng)過幅相補償后數(shù)據(jù)分別為ΔI補償+jΔQ補償,差通道的幅度補償和相位補償分別為K補、φ補,其補償系數(shù)分別為KI+jKQ,所以,差通道幅相補償量就可表示成
Δ補=K補exp(jφ補)=KI+jKQ
(1)
補償后的信號可表示為
Δ補后=(ΔI+jΔQ)KI+jKQ
(2)
根據(jù)幅相補償原則,補償后的差通道信號應當?shù)扔诤屯ǖ佬盘枺屯ǖ佬盘栒徊蓸覫Q數(shù)據(jù)分別為ΣI、ΣQ,即
Δ補后=ΣI+jΣQ
(3)
向和、差通道輸入等幅等相信號,計算幅相補償系數(shù)。根據(jù)幅相補償?shù)母拍睿傻玫饺缦鹿?/p>
(4)
可求解得到差通道的幅相補償系數(shù)為
(5)
(6)
2 脈沖雷達傳統(tǒng)幅相標定流程
在傳統(tǒng)幅相標定工作過程中,雷達天線對準目標后,在方位或俯仰方向對目標進行拉偏,進行二次采樣平均計算以減少誤差,一般正偏、負偏各1 mil(1 mil=0.025 4 mm)。拉偏時,雷達信號處理將模/數(shù)轉換后的三通道IQ支路數(shù)據(jù)通過CPCI總線傳至測量計算機,測量計算機幅相一致性標定軟件采用平均統(tǒng)計法對這些數(shù)據(jù)進行處理,并按照上式的計算方法標定幅相補償系數(shù),其標定流程如圖1所示。
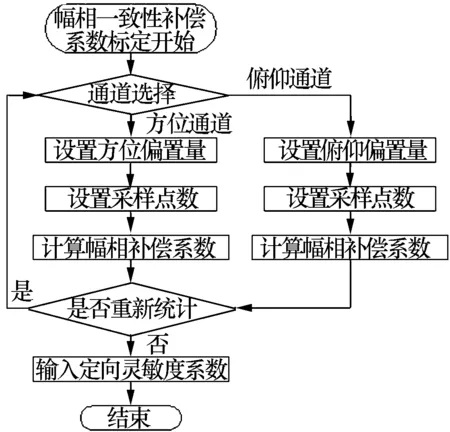
圖1 幅相一致性標定流程
由于伺服系統(tǒng)是通過偏置電壓的設置量來實現(xiàn)對目標電軸的角度拉偏,其實際拉偏角度數(shù)值上不能嚴格地對應1 mil,需要結合微光電視的脫靶量來判斷定向靈敏度是否滿足1 V/mil 的指標要求。若不滿足指標要求,則需根據(jù)定向靈敏度變化量計算定向靈敏度系數(shù)并手動輸入。
3 多模饋源跟蹤雷達幅相一致性標定
3.1 多模饋源跟蹤雷達
單脈沖體制跟蹤測量雷達是利用差模電磁場的天線接收方向圖以軸向為零值、偏軸有幅度、相位極性的規(guī)律變化來實現(xiàn)角度的自動閉合跟蹤,饋源能夠同時獲取用于保證穩(wěn)定跟蹤的方位和俯仰的角偏差信息,且對運動較快目標的跟蹤具有實時性強、動態(tài)滯后小的特點。
高頻接收機使用三個下行接收信道,分別傳送和(Σ)信號、方位差(A)信號和俯仰差(E)信號。其中,和信號由和模(TE11)產(chǎn)生,差信號由差模(TE21、TM01、TE01)組合產(chǎn)生。采用上述模式的饋源由多模喇叭、圓極化器、和差網(wǎng)絡等組成。根據(jù)和、方位、俯仰三路信號之間的比值,可實時解調出方位角與俯仰角偏離軸向角度,形成誤差電壓驅動天線運動保證雷達電軸對準目標,從而保持對目標的連續(xù)穩(wěn)定跟蹤。
3.2 跟蹤角偏差信號的形成過程
該脈沖雷達接收右旋圓極化信號,目標在空間偏離軸向時產(chǎn)生偏差信號的原理如圖2所示。其中,天線的輻射中心為O點,目標位置為P點,目標視軸方向為OP,天線電軸方向為OO′。OO′與OP的空間夾角θ,θ即為目標偏離天線電軸方向的空間角,φ為天線電軸與目標P點構成的平面與方位差波束的夾角。
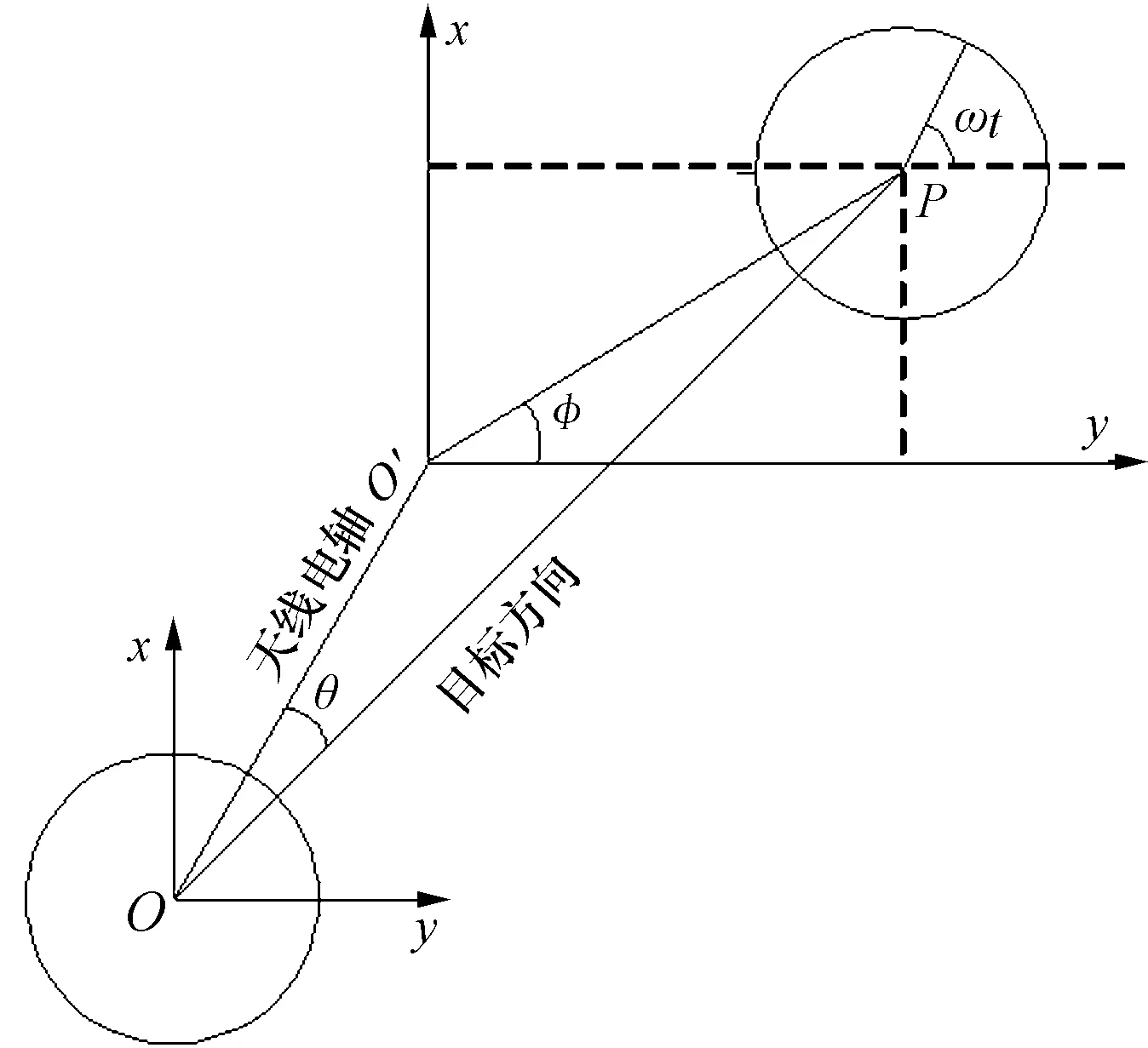
圖2 雷達角偏差信號的形成原理
當P點目標的信標信號為Us=Ue-jωt,與θ、φ無關。P點信號在饋源(正交模耦合器)激勵起基模TE11,經(jīng)過饋源和口輸出,這是因為在圓波導中TE11模具有對天線軸向偶對稱的方向性圖。TE11模在饋源和端輸出口為
UΣ(t)=Ucosωt
(7)
式中:ω為信號角頻率。

(8)
(9)
(10)
(11)
(12)
(13)
(14)
式中:ka,ke分別為方位、俯仰通道的天線方向圖差斜率。可根據(jù)天線方向圖由下式計算得到
(15)
式中:k為方位或俯仰通道的歸一化差斜率;θ0.5為和波束半功率波束寬度;Gm為和波束最大電平值;θ為方位面或俯仰面的角度值;GΔ為θ對應的差方向圖電平值。
理想左旋圓極化來波可用下式來表示
(16)
根據(jù)天線互易原理,分別得到和、方位和俯仰的電壓為
Us=Es·Ec=ej(rc-φ)
(17)
(18)
(19)
于是,可以分別得到方位和俯仰的角偏差電壓為

(20)
(21)
式中:φa、φe分別為方位通道、俯仰通道相對和通道的相位差。
3.3 多模角偏差信號的形成原理
對于不同時刻雷達天線電軸相對目標的不同位置,可用坐標(θ,φ)表示。其中,方位方向偏開角度為θcosφ,俯仰方向偏開角度為θsinφ。設t1時刻雷達天線電軸相對目標位置為(θ1,φ1),對應角偏差電壓為(Va1,Ve1);t2時刻雷達天線電軸相對目標位置為(θ2,φ2),對應角偏差電壓為(Va2,Ve2)。
t1~t2時刻,目標相對天線的移動角度為
(22)
當天線偏轉一定角度后,由上式可得方位、俯仰角偏差電壓為
(23)
通過差分,可以得到目標偏離天線的角偏差電壓變化值為
(24)
將上式代入得
(25)
通過式(25)可求出方位及俯仰通道相對和通道的相位差φa和φe。
根據(jù)相位差關系及幅相補償系數(shù)修正前后模不變的原則,可得
(26)


(27)
同理可得修正后的俯仰支路定向靈敏度系數(shù)LE′。
4 結束語
脈沖雷達的優(yōu)勢就是具有較高的測角精度,但這必須建立在實時校準的基礎上,經(jīng)過幅相一致性校準,測角精度基本能達到1%的波束寬度。而基于多模自跟蹤體制,通過建立天線偏離角與角偏差信號關系的數(shù)學模型,獲取目標相對天線角度變化值以及角偏差電壓變化值,確定了幅相補償系數(shù)新的計算方法。該方法應用于靶場實際工作中,可有效提高單脈沖跟蹤測量雷達幅相一致性標定的精度和效率。
[2] 斯科尼克. 雷達系統(tǒng)導論[M].3版.南京電子技術研究所, 譯.北京: 電子工業(yè)出版社,2006. SKOLNIK M I. Introduction to radar system[M]. 3rd ed. Nanjing Research Institute of Electronics Technology, translate. Beijiing: Publishing House of Electronics Industry, 2006.
[3] 程 鈞, 鐘 嵐. 單脈沖雷達系統(tǒng)幅相一致性自動化標定的實現(xiàn)[J]. 現(xiàn)代雷達, 2007, 29(4): 28-30. CHENG Jun, ZHONG Lan. Realization of automated calibration of indentity of amplitude and phase in mono-pulse radar[J]. Modern Radar, 2007, 29(4): 28-30.
[4] 宋石玉, 劉 詠. 單脈沖雷達海上幅相一致性標定方法初探[J]. 科學技術與工程, 2011, 11(9): 2114-2116. SONG Shiyu, LIU Yong. The primary measure of monopulse radar offshore amplitude-phase calibration[J]. Science Technology and Engineering, 2011, 11(9): 2114-2116.
[5] 梁士龍, 郝祖全. 單脈沖雷達的一種角誤差提取方法[J]. 系統(tǒng)工程與電子技術, 2003, 25(1): 18-20. LIANG Shilong, HAO Zuquan. A method of angle error extraction for monopulse radar[J]. System Engineering and Electronics, 2003, 25(1): 18-20.
陳鳳友 男,1975年生,高級工程師。研究方向為脈沖雷達總體技術。
石一鳴 女,1985年生,工程師。研究方向為脈沖雷達信號和數(shù)據(jù)處理技術。
A Study on the Calibration of Amplitude and Phase Consistency Based on the System of Multi-mode Tracking
CHEN Fengyou,SHI Yiming
( The Unit 91550 of PLA, Dalian 116023, China)
The previous calibration method of the amplitude and phase consistency, which is used on the monopluse radar, has some weak points, such as the performable process being complex and the calibrating environment being limited. Multi-mode tracking established a mathematical model of the relation between deviation angle and error voltage, through obtaining the variational value of deviation angle and error voltage, a new method is determined, which is used to calibrate the amplitude and phase consistency. It has important application value for improving the efficiency of the amplitude and phase calibration, as well as overcoming the limitation of the calibrating environment.
multi-mode tracking; amplitude and phase consistency; S curve
10.16592/ j.cnki.1004-7859.2016.11.015
陳鳳友 Email:dlchfy@sina.com
2016-08-17
2016-10-19
TN958
A
1004-7859(2016)11-0071-04
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公共安全(2017年11期)2017-02-06 05:28:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
燕山大學學報(2015年4期)2015-12-25 02:19:49
