彈道處理中的偏差修正與數據修補
2016-12-22 06:40:43荀瑞新
現代計算機 2016年32期
荀瑞新
(92941部隊96分隊,葫蘆島 125000)
彈道處理中的偏差修正與數據修補
荀瑞新
(92941部隊96分隊,葫蘆島125000)
為減少空中目標測量數據中的時間偏差和野值對彈道處理精度的影響,提出利用三點拉格朗日插值方法對測量數據進行時間不一致修正,采用外推預報對野值進行識別,為保證測量數據序列的完整性和連續性,利用最小二乘擬合方法對剔除野值后的數據序列進行修補。三種方法結合使用,可有效提高彈道處理的精度。
彈道;偏差修正;數據修補
0 引言
在武器系統鑒定試驗中,對目標外彈道的測量主要依靠光學測量,實時將測量數據進行收集、傳輸和處理。為對測量目標的性能進行準確評估,對測量數據的精度要求較高,但在實際測量過程中,常因測站環境、無線電傳輸干擾、氣候因素及人為操作等偶然因素的影響,使測量數據存在野值和時間延遲,使得測量數據偏離真實值。直接對原始數據進行處理會將錯誤的數據帶入處理結果中,導致外彈道的測量結果精度降低,給后續的鑒定工作帶來嚴重干擾。因此,有效識別和修復原始測量數據中的野值和修正數據時間的不一致是提高外彈道處理精度的有效手段。
為解決這個問題,本文提出利用三點拉格朗日插值方法對測量數據進行時間不一致修正[1],并將修正后的數據序列利用外推預報和最小二乘擬合方法進行野值的識別與修補。
1 目標測量數據時間不一致修正
光學設備跟蹤測量空中目標時,由于測量信號的傳播會有延遲,tk時刻的目標測量數據mk'并不是空中目標tk時刻的測量數據,而是在tk之前tk'時刻的測量數據,tk'時刻可由式(1)計算得出:

式中Rk為測量設備在tk'時刻與目標的距離。
在實際測量中,均為多個設備跟蹤測量同一目標,由于各個測量設備的布站位置不一樣,因此需對各設備在時刻tk的測量數據作時間不一致修正。
通常的作法是用三點拉格朗日插值方法,將測量數據mk'修正到tk時刻。
設tk-1、tk、tk+1三個時刻的測量數據為mk-1'、mk'、mk+1',則由拉格朗日插值公式:
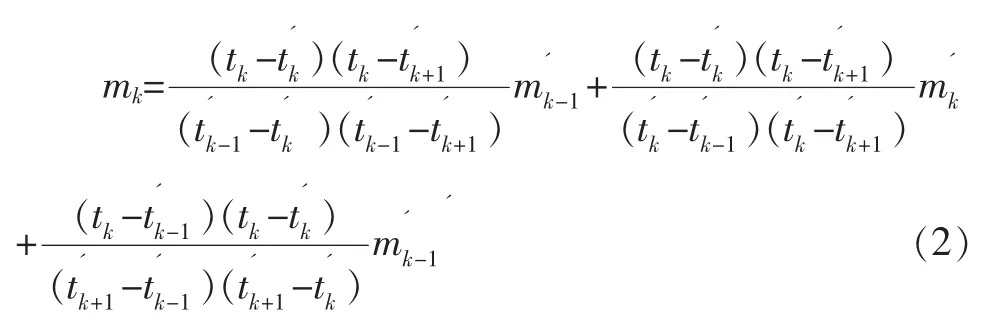
式中mk即為tk時刻目標的真實測量數據,由式(1)可知,當測量設備本身存在采樣時延Δt時:

該方法首先將測量時刻進行修正,再利用三點拉格朗日插值方法將目標的測量數據修正到真實時刻的數據,可有效減小因測量信號延遲所帶來的數據偏差。
但在實際跟蹤測量過程中,數據常含有大量的野值,導致處理后的彈道數據不能準確反映目標飛行的實際情況,將測量數據中的野值進行剔除就顯得尤為重要,下面介紹一種野值的識別與修補方法。
2 野值的識別與修補
在對目標跟蹤測量過程中,由于測量設備布站位置、裝備狀態或人為等其他因素,導致測量數據中存在較大的野值,不利于后續的彈道處理分析工作。因此,在對測量數據進行處理時,首先必須識別野值,同時為保證數據的完整性、連續性,在將野值剔除后應進行數據的修補。
在對空中目標進行跟蹤測量過程中,首先采用外推預報對野值進行識別,再用最小二乘擬合方法將剔除野值后的數據進行修補。

在判別測量數據是否為野值時,應首先保證參加預報測量數據的合理性、準確性。為準確反映目標的運動特征,當測量數據判別為野值時,用預報值來代替野值的數據點不宜過多,數據時間段落不宜過長。對于這種情形,可以用最小二乘擬合法來做插值處理。
下面對外推預報和最小二乘擬合法進行簡要介紹:
步驟1:選擇數據連續性、完整性較好的測量數據段落作為外推預報的基點
在測量數據列中選取N1個數據作為外推預報的起點,并利用多項式最小二乘擬合方法預報下一點并判別是否為野值,若連續N2(或多于N2)個數據都是合理的,則這N2個數據可以作為預報基點,若不能得到N2個連續的合理數據,則可以重新尋找預報基點。
步驟2:野值的識別與修補[2]
將數據連續性、完整性較好的測量數據利用最小二乘擬合法進行外推預報。對測量數據進行野值判斷,如果識別的野值在數量上和時間段落上符合數據處理的要求,則可以用預報值來進行代替。
步驟3:野值的插值修補
3 外彈道光學測量方法
目前,常用的外彈道光學測量方法為方向余弦法(即“R”公式),是目標外彈道光學測量的主要使用方法。下面對方向余弦算法進行簡要介紹。
根據目標與光測設備之間的關系,可以得到光測設備與目標向量在發射系中的方向余弦:
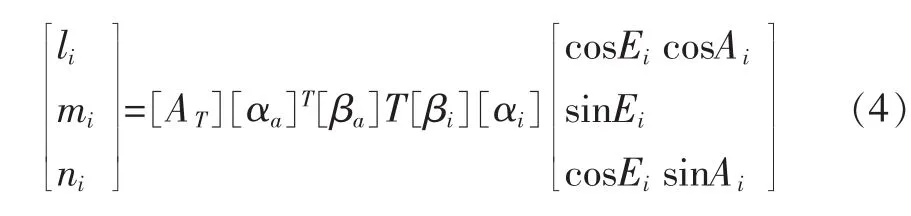
式中:i=1,2;Ei和AI分別為第i臺光測設備測量目標的俯仰角和方位角;[AT]為方位角矩陣;[α]和[β]分別為目標發射點和光測設備的經度和緯度矩陣。可以得出兩臺光測設備與目標連線之間夾角的余弦分別為:
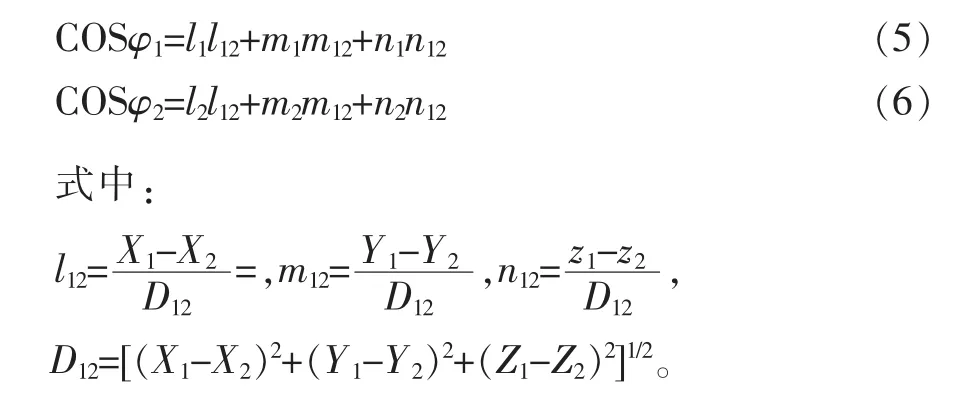
式中:Xi,Yi,Zi為第i個光測設備在發射系中的站址坐標。根據正弦定理,測量設備到目標的斜距R1和R2為:

,得出目標在發射系中的坐標為:

4 結語
本文首先提出了利用三點拉格朗日插值方法對測量數據進行時間不一致的數據修正,將原始測量數據修正到目標飛行真實時刻的數據。再利用數據外推和最小二乘擬合方法對測量數據序列中的野值進行識別與修補,該野值濾波算法在剔除數據中野值的同時,又進行了有效的數據補充,避免因剔除野值而產生的數據缺失。三種方法與外彈道光學測量方法結合使用,彈道處理結果能較好地反映目標的運動規律及空間位置,有利于后續的數據分析工作。
[1]王正明,易東云等.彈道跟蹤數據的校準與評估[M].湖南:國防科技大學出版社,2008.
[2]封麗芳,龍水平,郭立民.雷達、紅外成像傳感器數據融合方法的研究與應用[J].應用科技,2005.
Trajectory;Deviation Correct;Data Repair
Deviation Correction and Data Repairing in Trajectory Processing
XUN Rui-xin
(Unit 92941,Huludao Liaoning 125000)
In order to reduce the influence of time deviation and outliers on the trajectory processing,the time deviation in the measurement data is corrected by the method of Lagrange interpolation,the outliers is recognized by the method of extrapolation forecast,the data sequence is repaired by the method of least squares for ensure the integrity and the continuity of the data sequence.The accuracy of trajectory processing can be effectively improved by the three methods.
1007-1423(2016)32-0017-03
10.3969/j.issn.1007-1423.2016.32.004
荀瑞新(1981-),男,遼寧葫蘆島人,本科,工程師,研究方向為數據處理
2016-10-08
2016-11-18
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56