電動(dòng)汽車振動(dòng)能量回收懸架及其特性優(yōu)化
2016-12-23 00:47:37許廣燦徐俊李士盈曹秉剛惠越
西安交通大學(xué)學(xué)報(bào) 2016年8期
關(guān)鍵詞:振動(dòng)
許廣燦,徐俊,李士盈,曹秉剛,惠越
(1.西安交通大學(xué)機(jī)械工程學(xué)院,710049,西安;2.西安交通大學(xué)機(jī)械制造系統(tǒng)工程國家重點(diǎn)實(shí)驗(yàn)室,710049,西安)
?
電動(dòng)汽車振動(dòng)能量回收懸架及其特性優(yōu)化
許廣燦1,2,徐俊1,2,李士盈1,2,曹秉剛1,2,惠越1,2
(1.西安交通大學(xué)機(jī)械工程學(xué)院,710049,西安;2.西安交通大學(xué)機(jī)械制造系統(tǒng)工程國家重點(diǎn)實(shí)驗(yàn)室,710049,西安)
針對(duì)汽車懸架振動(dòng)能量耗散、懸架阻尼特性較差的問題,提出了一種滾珠絲杠式振動(dòng)能量回收懸架,實(shí)現(xiàn)了懸架振動(dòng)能量回收。通過局部?jī)?yōu)化方法得到了變阻尼系數(shù)的懸架阻尼特性,提升了懸架性能。建立了饋能懸架的理論及仿真模型,仿真結(jié)果表明:采用路面隨機(jī)高程激勵(lì),在不同路面等級(jí)下平均饋能功率為40~200 W。搭建了饋能懸架振動(dòng)實(shí)驗(yàn)臺(tái),實(shí)驗(yàn)結(jié)果表明:采用電機(jī)拖動(dòng),在不同振動(dòng)速度下瞬時(shí)饋能功率達(dá)到120 W。構(gòu)造了懸架性能目標(biāo)函數(shù),通過控制負(fù)載阻值,用實(shí)驗(yàn)數(shù)據(jù)擬合得到了變阻尼系數(shù)的懸架特性。滾珠絲杠式饋能懸架不僅可以實(shí)現(xiàn)懸架振動(dòng)能量的回收,而且可以控制負(fù)載阻值來優(yōu)化懸架特性。
振動(dòng)能量回收;被動(dòng)懸架;饋能懸架;振動(dòng)實(shí)驗(yàn)臺(tái);電動(dòng)汽車
汽車懸架用于緩沖行駛過程中路面?zhèn)鬟f給車身的沖擊,滿足駕乘人員對(duì)行駛平順性的要求[1]。被動(dòng)懸架以阻尼器摩擦的形式將這部分振動(dòng)能量轉(zhuǎn)化成熱能耗散掉來減振,主動(dòng)和半主動(dòng)懸架需要外部能量輸入來改善懸架阻尼特性[2]。目前電動(dòng)汽車的發(fā)展備受關(guān)注,有限的續(xù)駛里程成為其快速推廣的瓶頸[3]。饋能懸架既可以回收振動(dòng)能量,延長(zhǎng)電動(dòng)汽車的續(xù)駛里程,又可以優(yōu)化懸架阻尼特性,提升駕乘舒適性,因此具有很好的發(fā)展前景。
近年來,以懸架阻尼特性為優(yōu)化目標(biāo)的饋能懸架成為了研究熱點(diǎn)。Jolly等采用液壓機(jī)構(gòu)作為饋能作動(dòng)器,用于車輛減振以及振動(dòng)能量回收[4]。Okada等將直線電機(jī)作為饋能作動(dòng)器,調(diào)節(jié)電機(jī)的負(fù)載阻抗來改善懸架阻尼特性[5-6]。Kawamoto等采用滾珠絲杠和旋轉(zhuǎn)電機(jī)結(jié)合作為饋能作動(dòng)器,用改進(jìn)的天棚控制算法實(shí)現(xiàn)了懸架主動(dòng)控制[7]。吉林大學(xué)劉松山等設(shè)計(jì)了雙離合器饋能懸架,對(duì)饋能懸架的阻尼特性進(jìn)行了詳細(xì)的研究[8-9]。上海交通大學(xué)喻凡等將滾珠絲杠和直流電機(jī)集成為一體作為饋能懸架作動(dòng)器,進(jìn)行懸架阻尼特性的優(yōu)化和部分振動(dòng)能量的回收[10-11]。
對(duì)于電動(dòng)汽車,饋能懸架可以利用電動(dòng)汽車的電池系統(tǒng),不用額外增加儲(chǔ)能設(shè)備。因此,以能量回收為目標(biāo)的電動(dòng)汽車饋能懸架更具有研究和發(fā)展的價(jià)值。本文采用滾珠絲杠和電機(jī)構(gòu)成饋能作動(dòng)器,以電動(dòng)汽車為研究對(duì)象,對(duì)饋能懸架系統(tǒng)進(jìn)行系統(tǒng)分析,搭建了饋能懸架實(shí)驗(yàn)臺(tái);針對(duì)電動(dòng)汽車實(shí)際運(yùn)行工況,提出了饋能懸架特性的局部?jī)?yōu)化方法。
1 懸架理論模型及被動(dòng)懸架能耗
1.1 路面隨機(jī)高程重構(gòu)
懸架激勵(lì)模型的準(zhǔn)確性對(duì)懸架性能的分析具有重要影響,路面隨機(jī)高程的時(shí)域模型更便于研究懸架控制策略[12]。采用重構(gòu)時(shí)域路面模型的方法[13],將不同等級(jí)路面高程的隨機(jī)波動(dòng)采用高斯白噪聲ω(t)代替,擬合出隨機(jī)路面不平度的時(shí)域模型[14]。隨機(jī)路面高程輸入為
(1)
式中:xg是路面隨機(jī)高程;n00是下截止空間頻率;n0是參考空間頻率;G0是路面不平度。
由式(1)可知,路面高程和車輛行駛速度v0、路面不平度G0以及輸入的高斯白噪聲有關(guān)。在仿真中,需要對(duì)帶限白噪聲的采樣時(shí)間和噪聲強(qiáng)度進(jìn)行合理設(shè)置。
1.2 車輛懸架理論模型
懸架理論模型包括被動(dòng)懸架和饋能懸架,均采用二自由度(2DOF)模型進(jìn)行分析[15]。忽略運(yùn)動(dòng)中的摩擦,將輪胎等效為剛度為k2的彈簧,建立懸架2DOF振動(dòng)模型,如圖1所示。饋能懸架與被動(dòng)懸架的振動(dòng)模型區(qū)別在于:饋能懸架起到減振作用的是饋能懸架作動(dòng)器,不是被動(dòng)懸架的阻尼器,如圖1中虛線框所示。

圖1 懸架2DOF振動(dòng)模型
建立被動(dòng)懸架和饋能懸架理論模型的運(yùn)動(dòng)學(xué)方程為
(2)
(3)
被動(dòng)懸架阻尼器平均耗能功率為
(4)
對(duì)于饋能懸架,忽略滾珠絲杠副和饋能電機(jī)等部件的損耗,得到饋能懸架的平均饋能功率為
(5)
1.3 被動(dòng)懸架耗能
參考某款電動(dòng)汽車的參數(shù):1/4車身部分質(zhì)量ms=313.5 kg;車輪部分質(zhì)量mu=32.5 kg;懸架阻尼器阻尼系數(shù)cs=1 989 N·s·m-1;懸架彈簧剛度系數(shù)k1=17 550 N·m-1;輪胎部分等效剛度系數(shù)k2=149 500 N·m-1。懸架各個(gè)性能指標(biāo)采用其均方根值來衡量[16],車輛在不同等級(jí)路面行駛時(shí)的被動(dòng)懸架的耗能和懸架性能,見表1。

表1 車輛在不同等級(jí)路面行駛時(shí)的被動(dòng)懸架性能
實(shí)驗(yàn)結(jié)果表明:路面等級(jí)越差,則被動(dòng)懸架阻尼力越大,被動(dòng)懸架耗能越高。以B級(jí)路面為例,1/4車輛被動(dòng)懸架阻尼器平均耗能功率為54.13W,其整車懸架平均耗能功率約為261.52W。
2 饋能懸架作動(dòng)器及饋能分析
電動(dòng)汽車滾珠絲杠式饋能懸架系統(tǒng)如圖2所示。車輛簧載質(zhì)量和非簧載質(zhì)量的相對(duì)運(yùn)動(dòng)通過滾珠絲杠轉(zhuǎn)化為旋轉(zhuǎn)運(yùn)動(dòng),帶動(dòng)饋能電機(jī)發(fā)電,并通過能量回收電路完成振動(dòng)能量的回收。滾珠絲杠和饋能電機(jī)的引入增加了車輛的簧載質(zhì)量。在車輛振動(dòng)時(shí),由于旋轉(zhuǎn)產(chǎn)生的慣性力,作為軸向力的一部分作用到饋能懸架作動(dòng)器上。饋能電機(jī)作為發(fā)電機(jī)運(yùn)轉(zhuǎn),產(chǎn)生的電磁轉(zhuǎn)矩表現(xiàn)為制動(dòng)性質(zhì)的轉(zhuǎn)矩,作為軸向力的另一部分,用于車輛的減振。

圖2 電動(dòng)汽車滾珠絲杠式饋能懸架能量回收系統(tǒng)
2.1 饋能懸架作動(dòng)器模型及負(fù)載分析
饋能懸架作動(dòng)器由滾珠絲杠副和饋能電機(jī)構(gòu)成,是饋能懸架的關(guān)鍵機(jī)構(gòu)。饋能懸架作動(dòng)器模型假設(shè):①滾珠絲杠軸和電機(jī)轉(zhuǎn)子軸是剛性的;②忽略各個(gè)連接部件之間的間隙;③忽略運(yùn)動(dòng)中的摩擦。建立饋能懸架作動(dòng)器的動(dòng)力學(xué)模型,如圖3所示。

圖3 饋能作動(dòng)器動(dòng)力學(xué)模型
路面隨機(jī)高程激勵(lì)造成饋能懸架振動(dòng),經(jīng)過滾珠絲杠傳動(dòng),有

(6)

根據(jù)力矩平衡方程得到懸架作動(dòng)器的轉(zhuǎn)矩為
(7)
式中:ke是電磁轉(zhuǎn)矩常數(shù);Jm是饋能電機(jī)等效轉(zhuǎn)動(dòng)慣量;Jb是滾珠絲杠等效轉(zhuǎn)動(dòng)慣量;i是饋能電機(jī)的感應(yīng)電流。
饋能懸架作動(dòng)器上的軸向力為
(8)
由式(8)可知,軸向力包括:①饋能電機(jī)發(fā)電時(shí)電磁力矩轉(zhuǎn)化而來的軸向力Fe;②旋轉(zhuǎn)部分慣性質(zhì)量產(chǎn)生的慣性力矩轉(zhuǎn)化而來的軸向力Fi。在懸架振動(dòng)過程中,起到懸架減振作用的是Fe,不包含慣性力。
當(dāng)饋能懸架作動(dòng)器負(fù)載為電阻時(shí),結(jié)合電機(jī)感應(yīng)電動(dòng)勢(shì)u=keω和i=u/R,R為負(fù)載電阻,將式(6)代入式(8)中,即可推導(dǎo)得到懸架阻尼力為
(9)

此時(shí),饋能懸架負(fù)載端功率為
(10)
由式(9)、式(10)可知,在饋能懸架機(jī)械結(jié)構(gòu)確定時(shí),懸架的阻尼系數(shù)和饋能功率均只和負(fù)載端電阻值有關(guān),故當(dāng)負(fù)載為電阻時(shí),懸架的控制對(duì)象為負(fù)載阻值。
當(dāng)負(fù)載為電動(dòng)汽車電池組時(shí),設(shè)其輸出端電流為I,端電壓為Ub,則懸架的阻尼力為
(11)
通過對(duì)比被動(dòng)懸架阻尼力得到
(12)
由式(12)可知,在饋能懸架機(jī)械結(jié)構(gòu)確定時(shí),懸架的阻尼系數(shù)和電池電流以及懸架行程速度有關(guān)。根據(jù)不同的懸架振動(dòng)速度,調(diào)整電池端電流I可以實(shí)現(xiàn)不同行駛工況下阻尼力的控制。
此時(shí)I=(Ub-keω)/r,其中r是負(fù)載電路和電池內(nèi)阻的等效阻抗,饋能懸架的饋能功率為
(13)
由式(11)~(13)可知,當(dāng)負(fù)載為電動(dòng)汽車電池組時(shí),調(diào)節(jié)電池端的電流值,會(huì)同時(shí)影響懸架的阻尼系數(shù)和饋能功率,故懸架的控制對(duì)象為電池組電流。
2.2 饋能懸架系統(tǒng)仿真
建立饋能懸架負(fù)載形式為電阻時(shí)的模型。饋能懸架模型與被動(dòng)懸架的不同參數(shù)為:饋能懸架車身質(zhì)量msr=325.8 kg;滾珠絲杠導(dǎo)程l=16 mm;作動(dòng)器引入慣性質(zhì)量部分的轉(zhuǎn)動(dòng)慣量J=0.729 6×10-4kg·m2;饋能電機(jī)電磁轉(zhuǎn)矩常數(shù)ke=0.59;負(fù)載電阻R=27 Ω。車輛在不同等級(jí)路面行駛時(shí)的饋能懸架性能,見表2。

表2 車輛在不同等級(jí)路面行駛時(shí)的饋能懸架性能
對(duì)比表1、表2中的兩種懸架性能,相同的阻尼系數(shù)的情況下,饋能懸架的輪胎動(dòng)載荷遠(yuǎn)小于被動(dòng)懸架,導(dǎo)致輪胎抓地力不足。饋能懸架的理論饋能功率小于被動(dòng)懸架的理論耗能功率。由表2可見,B級(jí)路面1/4車輛饋能懸架平均饋能功率為43.5W,整車饋能功率為174W,這部分回饋能量可以有效延長(zhǎng)電動(dòng)汽車的續(xù)駛里程。
根據(jù)式(9)~(10)可知,當(dāng)懸架負(fù)載為電阻時(shí),改變負(fù)載電阻可以調(diào)節(jié)懸架性能。對(duì)不同負(fù)載端電阻進(jìn)行仿真,得到饋能懸架性能見表3。

表3 負(fù)載電阻對(duì)饋能懸架性能的影響
由表3可見,車身加速度隨負(fù)載電阻的增加而減小,平均饋能功率隨之增大。對(duì)于電動(dòng)汽車的駕乘人員,希望盡可能多地回收振動(dòng)能量來延長(zhǎng)電動(dòng)汽車?yán)m(xù)駛里程,同時(shí)保持車身加速度較小,但仿真結(jié)果表明,車身加速度和平均饋能功率二者不能同時(shí)達(dá)到最優(yōu)。
3 饋能懸架實(shí)驗(yàn)驗(yàn)證及其特性優(yōu)化
3.1 饋能懸架振動(dòng)實(shí)驗(yàn)臺(tái)及實(shí)驗(yàn)驗(yàn)證
滾珠絲杠式饋能懸架振動(dòng)實(shí)驗(yàn)臺(tái)如圖4所示。兩部分中的饋能電機(jī)型號(hào)一致。圖4a為懸架振動(dòng)實(shí)驗(yàn)臺(tái),圖4b為圖4a中的橢圓形虛線框部分,用來驗(yàn)證負(fù)載阻值對(duì)能量回收和懸架阻尼力的影響。
懸架振動(dòng)實(shí)驗(yàn)臺(tái)主要包括4部分:A部分模擬懸架車身質(zhì)量;B部分模擬懸架車輪質(zhì)量,并作為滾珠絲杠副和懸架彈簧的安裝平臺(tái);C部分用于傳遞路面高程;D部分作為懸架實(shí)驗(yàn)臺(tái)的底座,用于電動(dòng)推桿的安裝以及實(shí)驗(yàn)臺(tái)的整體穩(wěn)定。電機(jī)對(duì)拖實(shí)驗(yàn)臺(tái)包括驅(qū)動(dòng)電機(jī)、饋能電機(jī)、扭矩傳感器、整流器、負(fù)載功率電阻、ARM控制板以及上位機(jī)。ARM控制板用于實(shí)時(shí)信號(hào)采集、監(jiān)測(cè)以及控制電機(jī)的PWM占空比。
采用懸架振動(dòng)實(shí)驗(yàn)臺(tái)進(jìn)行激振實(shí)驗(yàn),設(shè)置電動(dòng)推桿參數(shù)為:輸出位移周期1s,幅值12mm。示波器顯示饋能電機(jī)相電壓峰峰值為2V左右,均值為273mV,經(jīng)過整流濾波電路后,測(cè)得負(fù)載電阻電壓均值為610mV。由于激勵(lì)頻率較低、幅值較小,因此回饋的能量有限。

(a)懸架振動(dòng)實(shí)驗(yàn)臺(tái)

(b)電機(jī)對(duì)拖實(shí)驗(yàn)臺(tái)圖4 滾珠絲杠式饋能懸架振動(dòng)實(shí)驗(yàn)臺(tái)
采用電機(jī)對(duì)拖實(shí)驗(yàn)臺(tái)進(jìn)行負(fù)載為電阻時(shí)的實(shí)驗(yàn)驗(yàn)證。實(shí)驗(yàn)中負(fù)載電阻為可調(diào)功率(0~500W)電阻,負(fù)載電阻阻值為10~45Ω,在不同的拖動(dòng)電機(jī)轉(zhuǎn)速(對(duì)應(yīng)不同的懸架振動(dòng)速度)下,得到負(fù)載電阻的功率以及等效懸架阻尼力隨懸架振動(dòng)速度的變化曲線,分別如圖5、圖6所示。

圖5 負(fù)載功率隨懸架振動(dòng)速度的變化
由圖5可知,負(fù)載電阻越小饋能功率越大,同時(shí)隨著懸架振動(dòng)速度的增加,瞬時(shí)饋能功率增大。在不同懸架速度下(對(duì)應(yīng)不同車輛行駛工況),改變負(fù)載電阻可使饋能懸架的瞬時(shí)饋能功率達(dá)到120W。

圖6 等效懸架阻尼力隨懸架振動(dòng)速度的變化
由圖6可知,等效懸架阻尼力隨著懸架速度的增加而增大,呈線型關(guān)系。負(fù)載電阻越小,懸架的等效阻尼系數(shù)就越大,當(dāng)負(fù)載電阻不變的時(shí)候,懸架的阻尼系數(shù)也基本不變,相當(dāng)于被動(dòng)懸架。
3.2 饋能懸架特性優(yōu)化
針對(duì)電動(dòng)汽車實(shí)際運(yùn)行工況,在不同的懸架速度、路面等級(jí)和電池荷電狀態(tài)(stateofcharge,SOC)下,調(diào)節(jié)負(fù)載阻值可以實(shí)現(xiàn)駕乘舒適性和饋能功率的局部?jī)?yōu)化。車身加速度決定了車輛的駕乘舒適性,饋能功率決定了懸架的饋能特性。構(gòu)造懸架系統(tǒng)目標(biāo)函數(shù)
(14)
(15)
式中:c1=(2πke/l)2;c2=(2π/l)2(Jm+Jb)。
當(dāng)饋能懸架系統(tǒng)機(jī)械結(jié)構(gòu)確定時(shí),參數(shù)c1、c2為常數(shù),得到饋能懸架系統(tǒng)目標(biāo)函數(shù)
(16)
根據(jù)式(16),目標(biāo)函數(shù)取決于負(fù)載端電阻和懸架振動(dòng)速度。當(dāng)懸架速度一定時(shí),目標(biāo)函數(shù)由饋能懸架的等效阻尼系數(shù)決定,即由負(fù)載阻值決定,則有z=z(P,a)→R。構(gòu)造饋能懸架系統(tǒng)目標(biāo)函數(shù)表達(dá)式為

(17)
式中:λ(0<λ<1)表示目標(biāo)函數(shù)關(guān)于阻尼特性和饋能特性的權(quán)重。根據(jù)式(16)、式(17),則有R=g(λ),g表示從λ到R的映射關(guān)系。由式(16)、式(17)可知,在實(shí)際行駛工況下,不同的權(quán)重λ對(duì)應(yīng)饋能懸架在當(dāng)前行駛工況下的局部最優(yōu)特性,該性能的實(shí)現(xiàn)通過調(diào)節(jié)負(fù)載電阻得到。在不同懸架振動(dòng)速度下,給定不同權(quán)重,采用實(shí)驗(yàn)數(shù)據(jù)擬合得到懸架的局部?jī)?yōu)化特性曲線,如圖7所示。
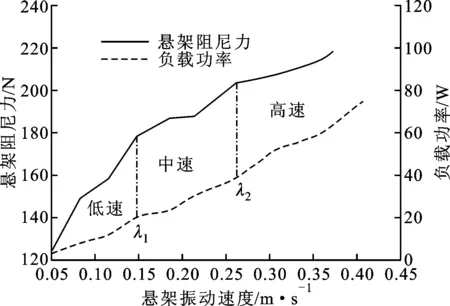
圖7 懸架局部最優(yōu)特性曲線
由圖7可知,饋能懸架的等效阻尼系數(shù)隨著懸架振動(dòng)速度的增加大致呈遞減規(guī)律,具有變阻尼特性。饋能功率受到負(fù)載電阻和懸架速度的雙重影響,呈現(xiàn)遞增規(guī)律。在懸架振動(dòng)速度較低的情況下,駕乘舒適性可以得到保證,因此駕乘舒適性權(quán)重較小。在速度較高的情況下,懸架振動(dòng)較為劇烈,應(yīng)以懸架減震為主,因此駕乘舒適性權(quán)重較大。
綜合電動(dòng)汽車實(shí)際工況,目標(biāo)函數(shù)約束條件包括車輛電池組的SOC值和路面不平度等級(jí)。路面等級(jí)較好以及電池組SOC值較低時(shí),目標(biāo)函數(shù)應(yīng)偏重于懸架的饋能特性,取0<λ<λ1;路面等級(jí)較差以及電池組SOC值較高時(shí),目標(biāo)函數(shù)應(yīng)偏重于懸架的阻尼特性,取λ2<λ<1;其他行駛工況時(shí),權(quán)重介于二者之間,λ1<λ<λ2。
4 結(jié) 論
仿真分析了被動(dòng)懸架耗能、饋能懸架的饋能潛力及其阻尼特性,確定了饋能懸架作動(dòng)器不同負(fù)載形式下的控制對(duì)象。仿真結(jié)果表明,饋能懸架在不同路面等級(jí)下的平均饋能功率為40~200 W,可有效延長(zhǎng)電動(dòng)汽車?yán)m(xù)駛里程。
搭建了滾珠絲杠式饋能懸架振動(dòng)實(shí)驗(yàn)臺(tái),開展了不同負(fù)載阻值的懸架振動(dòng)實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果表明:饋能懸架系統(tǒng)在不同振動(dòng)速度下的瞬時(shí)饋能功率達(dá)到120 W,改變負(fù)載阻值可以實(shí)現(xiàn)饋能懸架饋能特性以及懸架阻尼特性的調(diào)節(jié)。
提出了針對(duì)電動(dòng)汽車實(shí)際運(yùn)行工況下的懸架特性局部?jī)?yōu)化方法,根據(jù)實(shí)驗(yàn)結(jié)果擬合了懸架局部最優(yōu)特性曲線,得到了可變阻尼系數(shù)懸架特性,實(shí)現(xiàn)了饋能懸架特性的優(yōu)化。
[1] ROSHAN Y M, MOALLEM M. Control of a regenerative suspension system utilizing a three-phase bidirectional converter [C]∥Proceedings of the 40th Annual Conference of the IEEE. Piscataway, NJ, USA: IEEE, 2014: 4218-4223.
[2] AMER N H, RAMLI R, ISA H M, et al. A review of energy regeneration capabilities in controllable suspension for passengers’ car [J]. Energy Education Science and Technology: Part A Energy Science and Research, 2012, 30(1): 143-158.
[3] 曹秉剛. 中國電動(dòng)汽車技術(shù)新進(jìn)展 [J]. 西安交通大學(xué)學(xué)報(bào), 2007, 41(1): 114-118. CAO Binggang. Current progress of electric vehicle development in China [J]. Journal of Xi’an Jiaotong University, 2007, 41(1): 114-118.
[4] JOLLY M R, MARGOLIS D L. Regenerative systems for vibration control [J]. Journal of Vibration and Acoustics, 1997, 119(2): 208-215.
[5] OKADA Y, OZAWA K. Energy regenerative and active control of electro-dynamic vibration damper [J]. Transactions of the Japan Society of Mechanical Engineers C, 2004, 70(700): 3413-3418.
[6] HARADA H, OKADA Y, SUZUKI K. Active and regenerative control of an electrodynamic-type suspension [J]. Transactions of the Japan Society of Mechanical Engineers: C, 1996, 62(2): 4513-4519.
[7] KAWAMOTO Y, SUDA Y, INOUE H, et al. Modeling of electromagnetic damper for automobile suspension [J]. Journal of System Design and Dynamics, 2007, 1(3): 524-535.
[8] 劉松山, 王慶年, 王偉華, 等. 慣性質(zhì)量對(duì)饋能懸架阻尼特性和幅頻特性的影響 [J]. 吉林大學(xué)學(xué)報(bào)(工學(xué)版), 2013, 43(3): 557-563. LIU Songshan, WANG Qingnian, WANG Weihua, et al. Influence of inertial mass on damping and amplitude-frequency characteristic of regenerative suspension [J]. Journal of Jilin University(Engineering and Technology Edition), 2013, 43(3): 557-563.
[9] 于長(zhǎng)淼. 雙超越離合器式電磁饋能阻尼器的研究 [D]. 長(zhǎng)春: 吉林大學(xué), 2012: 33-58.
[10]ZHANG Guoguang, CAO Jianyong, YU Fan. Design of active and energy-regenerative controllers for DC-motor-based suspension [J]. Mechatronics, 2012, 22(8): 1124-1134.
[11]ZHENG Xuechun, YU Fan, ZHANG Yongchao. A novel energy-regenerative active suspension for vehicles [J]. Journal of Shanghai Jiaotong University, 2008, 13(2): 184-188.
[12]SHOJAEEFARD M H, KHALKHALI A, ERFANI S P. Multi-objective suspension optimization of a 5-DOF vehicle vibration model excited by random road profile [J]. International Journal of Advanced Design and Manufacturing Technology, 2014, 7(1): 1-7.
[13]陳杰平, 陳無畏, 祝輝, 等. 基于Matlab/Simulink的隨機(jī)路面建模與不平度仿真 [J]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2010, 41(3): 11-15. CHEN Jieping, CHEN Wuwei, ZHU Hui, et al. Modeling and simulation irregularity based on stochastic road surface on Matlab/Simulink [J]. Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(3): 11-15.
[14]HUANG B, HSIEH C Y, GOLNARAGHI F, et al. Development and optimization of an energy-regenerative suspension system under stochastic road excitation [J]. Journal of Sound Vibration, 2015, 357: 16-34.
[15]KHOSHNOUD F, ZHANG Y, SHIMURA R, et al. Energy regeneration from suspension dynamic modes and self-powered actuation [J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5): 1-12.
[16]KAWAMOTO Y, SUDA Y, INOUE H, et al. Electro-mechanical suspension system considering energy consumption and vehicle manoeuvre [J]. Vehicle System Dynamics, 2008, 46(11): 1053-1063.
(編輯 武紅江)
Energy Regenerative Suspension and Its Performance Optimization for Electric Vehicle
XU Guangcan1,2,XU Jun1,2,LI Shiying1,2,CAO Binggang1,2,HUI Yue1,2
(1. School of Mechanical Engineering, Xi’an Jiaotong University, Xi’an 710049, China; 2. State Key Laboratory for Manufacturing System Engineering, Xi’an Jiaotong University, Xi’an 710049, China)
A ball-screw energy regenerative suspension (BES) is proposed to solve the problems that the vibration energy of the automobile suspension is dissipated and its damping characteristic is poor. The BES not only realizes the suspension vibration energy recovery, but also obtains suspension damping characteristics with variable damping coefficients through a local optimization method. Hence, the performance of the BES is improved. Theoretical and simulation models of the suspension are established, and simulation results show that based on random road elevation, the average energy recovery power of the BES under different operating conditions is about 40 - 200 W. A vibration test platform of the BES is set up, and test results show that when a motor is used to drive, the instantaneous energy recovery power at different vibration speeds achieves 120 W. An objective function of the suspension performance is given, and test data is fitted to obtain the variable damping coefficient of the BES through changing the load resistance. It is concluded that the BES not only recycles the vibration energy, but also optimizes the suspension performance by controlling the load resistance.
vibration energy recovery; passive suspension; energy regenerative suspension; vibration test platform; electric vehicle
10.7652/xjtuxb201608015
2016-03-26。 作者簡(jiǎn)介:許廣燦(1989—),男,碩士生;徐俊(通信作者),男,講師。 基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(51405374);中國博士后科學(xué)基金資助項(xiàng)目(2014M560763)。
時(shí)間:2016-06-07
http:∥www.cnki.net/kcms/detail/61.1069.T.20160607.1156.002.html
U463.1
A
0253-987X(2016)08-0090-06
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
