基于多級網格模型的LiDAR數據河流邊緣提取算法
2016-12-27 09:16:46聞兆海
地理空間信息 2016年7期
聞兆海,謝 忠
(1.中國地質大學(武漢) 機械與電子信息學院,湖北 武漢 430074;2.中國地質大學(武漢) 信息工程學院,湖北 武漢 430074)
基于多級網格模型的LiDAR數據河流邊緣提取算法
聞兆海1,謝 忠2
(1.中國地質大學(武漢) 機械與電子信息學院,湖北 武漢 430074;2.中國地質大學(武漢) 信息工程學院,湖北 武漢 430074)

分析了內陸河流域點云數據的特性,提出了一種基于多級網格模型的河流邊緣提取算法。首先將目標區域按網格窗口大小進行逐級分層,并建立層級繼承關系;然后計算網格的平均高程、平均反射強度、點云密度等參數,利用8鄰域判決算法、面積閾值算法和河流連通性原則確定水體網格;最后對河流邊緣網格的水體點數據進行提取,確定河流邊緣。實驗數據表明,該方法能夠準確對河流進行提取。
機載激光雷達;點云數據;河流邊緣提取;多級網格模型
河流是人們賴以生存的重要自然資源,在人類生活、工農業生產、氣候、歷史變遷等方面,產生著重要的影響。對河流的觀測和研究一直是環境、水利、資源等領域的研究重點。目前,內河流域數據采集的主要方式已由傳統的航空攝影測量發展到數字攝影測量(DPS)[1]。機載LiDAR是近年來快速發展的一種低空對地測量方法,通過對地發射激光脈沖,并實時接收地面及地表物體反射的激光脈沖,可快速獲取地面及地表物體的位置及高程信息,生成目標區域的三維點云數據。這種測量方法受天氣、地形等條件影響小,可方便、快捷地獲取目標區域的地形、地物信息,因而,在內陸水域、海岸、灘涂測量領域得到了廣泛的應用[2-4]。機載LiDAR獲取的點云數據包括離散點的三維坐標和反射強度數據,也可記錄數據采集的信息、點的分類信息和GPS時間及顏色信息等[5]。
喬紀綱[6]等利用斜率分割、密度和反射強度分割、高度分割從LiDAR點云數據中提取了濱岸濕地微地貌。王宗躍[7-8]等基于平滑的雙層格網,結合影像和LiDAR點云數據對水體邊緣輪廓線進行了精確提取。張永軍[9]等采用LiDAR 數據生成灰度高程圖像,利用掃描線法確定最優水體種子點,再結合航空影像完成水體邊緣的準確提取。王延霞[10]等從LiDAR數據生成的DEM中自動提取了平原地區的河網結構,也取得較好的實驗結果。本文結合內陸河流域點云數據的特性,提出了一種基于多級網格模型的河流邊緣提取算法。
1 機載LiDAR點云水體數據分析
機載LiDAR點云數據記錄了地表地物的位置、高程和反射強度等基本信息,也包括回波類型、點分類、掃描角度和GPS時間等擴展信息[5]。不同地物的高程、反射強度、回波類型存在差異,這些信息為地物分類提供了基本依據。
概括起來,水體的特征表現為:①高程差異小,在平緩區域,高程趨同;②對機載LiDAR工作波段的電磁波具有強吸收性,表現為無反射點記錄或記錄點稀疏,反射強度弱;③水體形狀不規則,面積差異大,河流水體具有自然連通的性質。上述特征為水體提取提供了基本參考依據。
2 多級網格模型
不同的水體在形狀和面積上差異較大,即使是同一條河流,在不同區段,寬度也不盡相同,因此,無法用單一靜止的幾何模型來描述不同的水體。為此,本文構建了一種動態的多級網格模型,用不同大小的分級網格來逼近表征不同面積大小的水體。
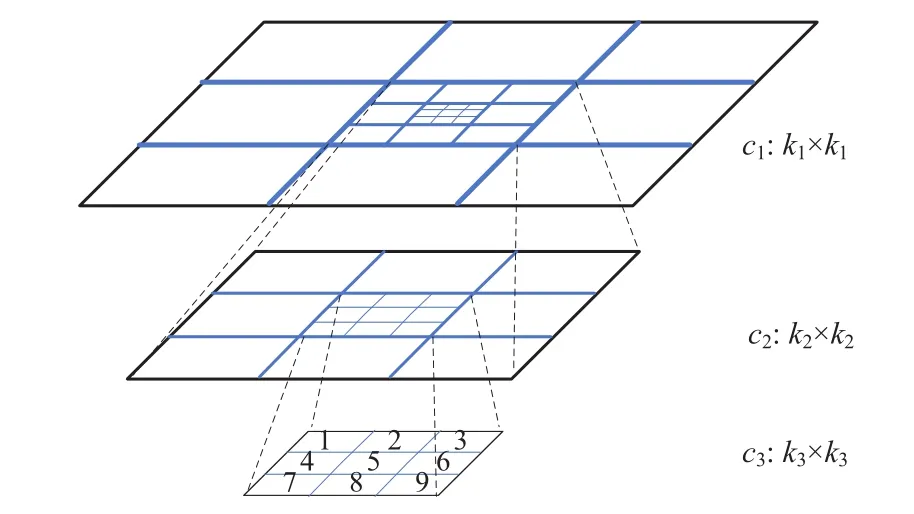
圖1 多級網格模型
根據目標區域的大小不同,構建一個n級網格模型,自上而下對應的網格層為c1、c2、…、cn。在c1層,按照邊長k1進行網格劃分,網格編號為bij,左下角為起始網格b11;對c1層的網格bij進行九宮格劃分,可得c2層的網格bijp1,網格邊長k2=k1/3;同理,可得cn層的網格bijp1…pn-1,網格邊長kn=kn-1/3,網格間的映射關系如圖1所示。
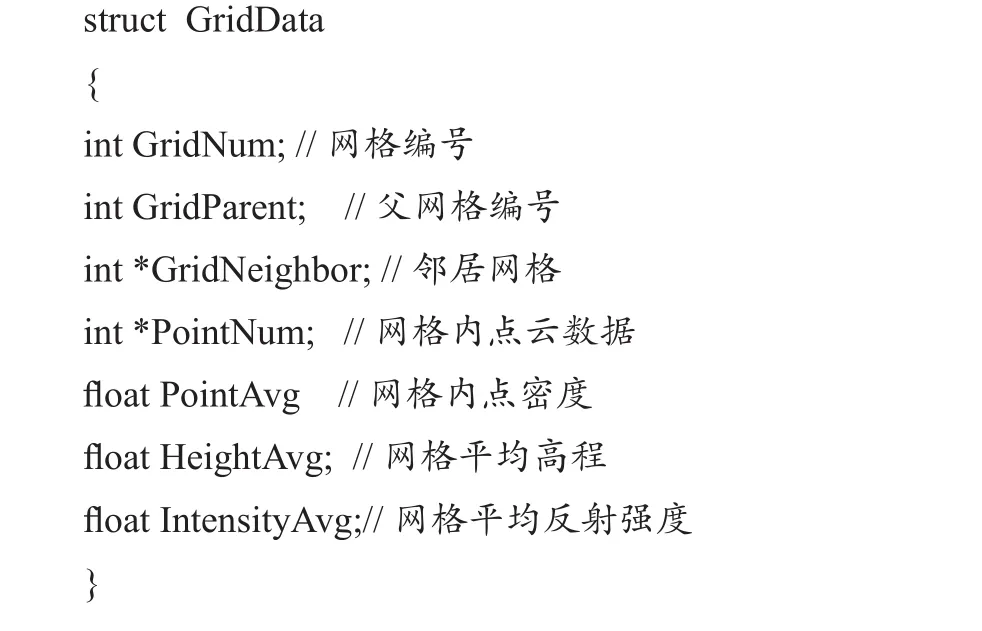
根據各級網格的劃分方法,確定網格邊界,可得到各級網格區域內的點云數據,計算各網格的平均高程、平均反射強度以及點云密度,可得到各網格的數據結構如下:
3 水體邊緣提取流程
3.1 算法流程
選擇目標區域的點云數據,按照點云數據處理的一般流程,其基本步驟如下:
1)粗差剔除,篩選出高程異常點,予以濾除;
2)將目標區域按網格窗口尺度大小進行逐級分層,并建立層級繼承關系,根據網格邊界坐標,將數據點劃分至相應網格內;
3)計算網格內點數據密度、平均高程、平均反射強度等數據,根據設定閾值,自上而下,逐級確定水體網格;
4)計算水體網格的鄰域非水體網格,提取網格內鄰近水體點,確定河流水體邊緣。
3.2 種子水體網格的提取
水體網格的提取是整個數據處理的關鍵。由于水體對機載LiDAR工作波段的電磁波具有強吸收性,因此得不到反射點記錄或點記錄稀疏,這種情況還可能與建筑物、植物等地物的遮擋有關,在創建網格模型時,水體區域數據和陰影區域數據會形成特征近似網格。
如何確定哪些網格是水體網格GridWater,是算法處理的重點。具體思路如下:
首先,在c1層,根據網格的點數據密度、平均高程、平均反射強度提取疑似水體網格Gi,Gi滿足:P (Gi)≤P,H(Gi)≤H,F(Gi)≤F,其中,P、H、F分別為網格的點數據密度、平均高程和平均反射強度閾值。
然后,確定種子水體網格。①8鄰域網格判別法。比較Gi的8鄰域網格,如果其8鄰域網格N8(Gi)均為疑似水體網格,則將當前Gi設定為種子水體網格,如圖2a所示。②面積閾值法。如果Gi的8鄰域網格N8(Gi)不全為疑似水體網格,則通過多級網格映射模型,提取所有與Gi連通的疑似水體網格,計算連通區域面積Si,如果大于閾值S,則Gi設定為種子水體網格,如圖2b所示。
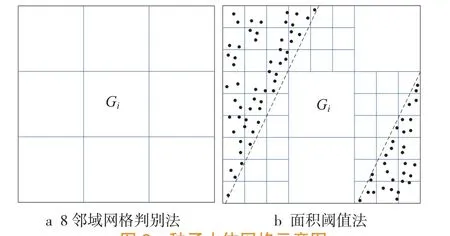
圖2 種子水體網格示意圖
最后,根據水體自然連通的性質,運用區域增長機制,以種子水體網格為中心,將與其鄰接的各層疑似水體網格標記為水體網格。
4 實驗結果及分析
實驗的目標區域位于德國的Vaihingen地區,數據記錄共有72 925條,數據采集于2008年,如圖3a所示,該區域的衛星圖像如圖3b所示。目標區域有一條河流,一個小島和一座橋,水體無反射點記錄。
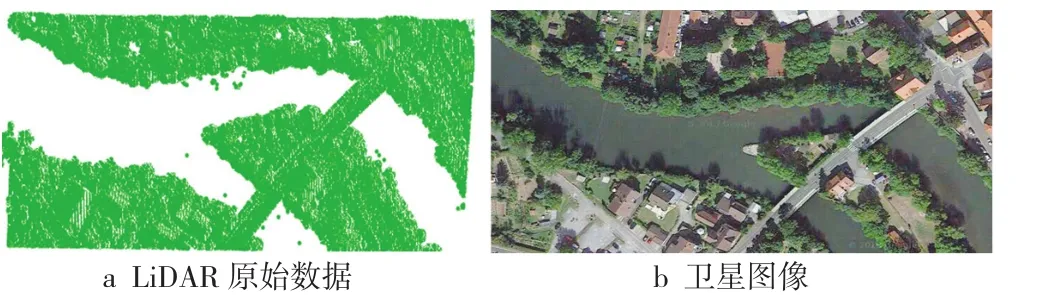
圖3 研究區示意圖
依次對目標區域點數據記錄進行處理。本實驗中,將目標區域分為3層,依次為c1、c2和c3,設c1層網格邊長為9 m,可得c1層網格數為324個,c2、c3層網格邊長依次為3 m、1 m。設c1層的網格點數據密度閾值P為0.05 個/m2,平均高程閾值H為258 m,平均反射強度閾值F為5,經過閾值比較,c1層疑似水體網格數為65 個。 根據種子水體網格確定算法,運用網格區域增長機制,得到c1層的水體網格共有49個,其中8鄰域網格判別法得到43個,位于圖4a的區域①;面積閾值法得到6個,面積閾值S設定為100 m2,位于圖4a的區域②、③。水體邊緣如圖4a中點集部分所示。將c1層網格邊長設定為4.5 m,重新執行上述程序,可得水體邊緣如圖4b所示。
網格模型為3層,當c1層網格邊長設定為9 m時,水體面積為8 786 m2,水體邊緣點數目為4 110個;當c1層網格邊長設定為4.5 m時,水體面積為8 777 m2,水體邊緣點數目為3 179 個。從實驗結果看,兩次實驗都獲取了準確的河流邊緣數據點,得到的水體面積基本一致。
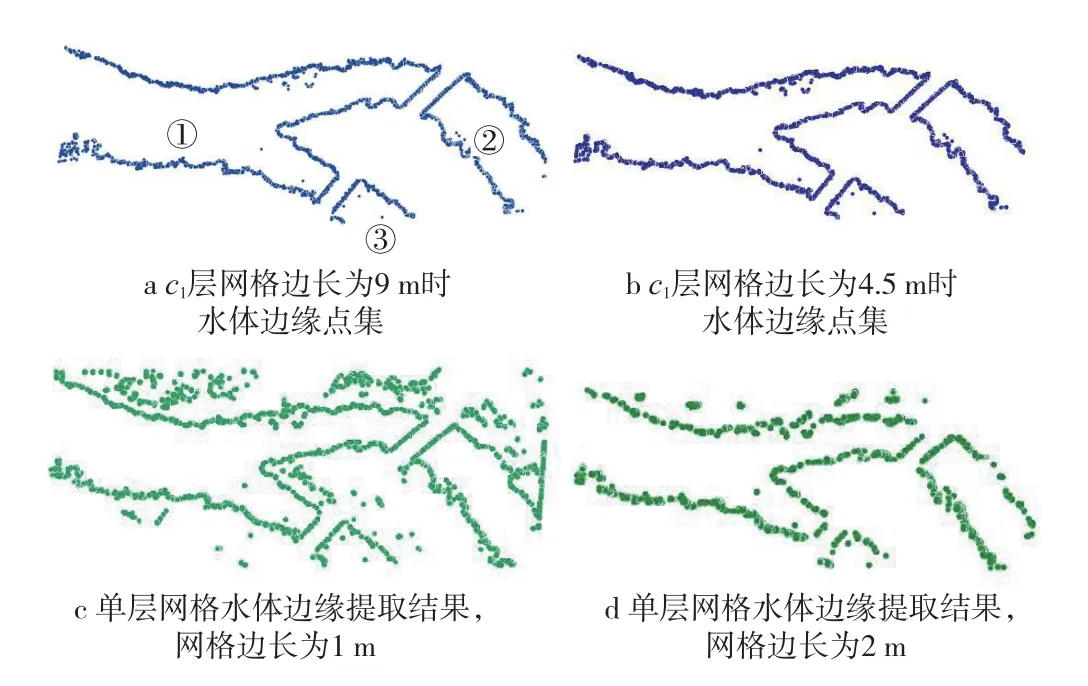
圖4 實驗提取結果
5 結 語
本文提出的基于多級網格模型的河流邊緣提取算法,可對不同面積大小的水體進行邊緣提取,相較于單級網格模型提取結果,如圖4c、d所示,精度更高,也有效避免了其他類別數據空洞的影響。另外,本算法也提取了河流上的橋梁以及河流中島嶼的邊緣特征,為流域特征地物建模提供了參考。對于因橋梁遮擋而損失的水體邊緣特征提取及相關水體計算,需要進一步研究。
[1] 賴旭東,鄭學東,萬幼川.激光雷達技術在數字流域中的應用探討[J].長江科學院院報,2005(5):88-91
[2] 郭際元,韓程帥,陳奇.LiDAR技術在內陸水系監測管理中應用綜述[J].環境科學與技術,2012(12):193-197
[3] 樓燕敏,吳迪.機載LiDAR技術在浙江省灘涂海岸測量中的應用研究[J].測繪通報,2012(12):47-50
[4] 謝有忠,詹瑜璋,胡植慶,等.激光雷達地形資料用于河道輸沙的研究[J].遙感學報,2013(1):202-209
[5] 張靖,高偉. LAS格式解析及其擴展域的應用[J].測繪科學, 2008,33(3):154-155
[6] 喬紀綱,黎夏,劉小平.基于地面約束的濱岸濕地微地貌LiDAR檢測研究[J].中山大學學報(自然科學版), 2009(4): 118-124
[7] 王宗躍,馬洪超,徐宏根,等.結合影像和LiDAR點云數據的水體輪廓線提取方法[J].計算機工程與應用, 2009(21):33-36
[8] 王宗躍,馬洪超,徐宏根,等.基于LiDAR點云數據的水體輪廓線提取方法研究[J].武漢大學學報(信息科學版), 2010(4):432-435
[9] 張永軍,吳磊,林立文,等.基于LiDAR數據和航空影像的水體自動提取[J].武漢大學學報(信息科學版), 2010(8):936-940
[10] 王延霞,史照良,李鵬.LiDAR DEM在平原區河網自動提取中的應用研究[J].測繪通報,2013(9):51-54
P23
B
1672-4623(2016)07-0017-03
10.3969/j.issn.1672-4623.2016.07.005
聞兆海,博士研究生,講師,從事機載激光雷達數據處理研究工作。
2015-06-12。
項目來源:中央高校基本科研業務費專項資金優秀青年基金資助項目(CUGL130225)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
