敏捷光學衛星無控幾何精度提升途徑探討
2017-01-03 10:53:38李貞金濤李婷楊冬
航天器工程 2016年6期
關鍵詞:測量
李貞 金濤 李婷 楊冬
(北京空間飛行器總體設計部,北京 100094)
敏捷光學衛星無控幾何精度提升途徑探討
李貞 金濤 李婷 楊冬
(北京空間飛行器總體設計部,北京 100094)
針對敏捷光學衛星無控制點幾何精度,提出了區分高頻和低頻姿態誤差、同時考慮定位誤差的精化傳播模型,通過仿真分析得出了低頻姿態誤差及姿態穩定度誤差對定位精度的影響規律,并以滿足30 m平面定位精度和1:50 000比例尺測圖要求為例,進行了定位誤差分配和定位精度預估,提出了提高無控定位精度的措施。結果表明:星敏感器低頻姿態角誤差主要造成了水平位置方向的系統誤差,但其在高程位置方向的系統誤差可以通過衛星前后對稱俯仰成像進行消除。當定位精度要求30 m量級時,星敏感器低頻誤差和夾角穩定性不需要在現有衛星水平上加嚴控制,但是應盡量采用大基高比,同時采用異側對稱立體成像方式,避免系統性低頻姿態誤差帶來額外的高程誤差;當精度要求滿足1:50 000時,應配置0.9″精度星敏感器,200 Hz以上高頻姿態測量設備和在軌夾角檢測裝置,同時將低頻誤差有效控制在5″以內等,以滿足15 m平面,6 m高程的精度要求。
敏捷光學衛星;無控制點;定位精度;低頻誤差;姿態內插;姿態穩定度
1 引言
近年來,我國陸續發射了多顆高分辨率光學衛星,影像分辨率逐漸從米級提升到亞米級,同時,借助整星大范圍、敏捷機動能力,能通過沿軌道方向前后擺動獲取同軌立體像對,具備了實現大比例尺測繪的必要條件。但是,相比國外高幾何精度的商業遙感衛星,國產遙感衛星所能實現的幾何精度仍在幾十米量級[1],利用國產高分辨率遙感衛星進行立體成像測繪亦處于嘗試階段。
從原理上說,無地面控制點衛星高精度幾何定位是完全可行的,但在工程實現方面,我國衛星,尤其是敏捷衛星要實現10 m以內定位精度要求并不容易,關鍵問題:①星敏感器測定的姿態角誤差除標稱高頻測量誤差外,還有不可忽視的低頻誤差以及相機與星敏感器間的夾角穩定性誤差。在具體地面無控制點處理中,一般無法用平差予以消除,導致處理成果帶有額外的誤差。②不同于采用固定交會角的多線陣測繪衛星,敏捷衛星為實現立體成像,姿態機動角度大且頻繁,衛星姿態穩定度較差,而星敏感器、陀螺輸出姿態數據頻率較低,衛星姿態往往帶有很大的隨機誤差,也會直接影響圖像定位精度。
對于衛星的圖像定位精度分析問題,文獻[2]利用攝影測量幾何關系對無控制點條件下的衛星攝影測量高程誤差進行了帶有物理含義的理論估算;文獻[3]利用前方交會原理建立了誤差數值模型,研究了單線陣CCD相機立體定位中姿態角、攝站位置、內方位元素幾何標定誤差以及像點量測誤差等對定位精度的影響規律,這些文獻僅考慮了各參數的隨機誤差。文獻[4]綜合分析了影響定位精度的各個指標的隨機和系統誤差,但針對“隨機+系統”誤差的傳播特性未進行區分,也未對涉及姿態穩定度誤差的關鍵設計參數要求進一步細分。
本文假定衛星在軌后,地面處理系統已完成對線陣CCD相機的在軌內標定和安裝矩陣等外標定工作,進一步探討星敏感器低頻誤差和敏捷姿態不穩兩個問題對無地面控制點圖像定位精度的影響規律及其誤差消除措施,提出了區分高頻和低頻姿態誤差、同時考慮設計參數的定位誤差精化傳播模型,通過仿真分析得出了低頻角元素誤差及姿態穩定度誤差對定位精度的影響規律,以滿足30 m平面定位精度和1:50 000比例尺測圖要求為例,進行了定位精度指標分析,最后提出了提高無控定位精度的措施。
2 敏捷光學衛星姿態誤差特性
從我國資源三號衛星發射入軌并成功應用之后,后續研制的非測繪類國產衛星幾何定位精度也有了較大的提升,主要原因在于衛星均采用了星地一體化設計,如高精度授時系統、相機/星敏感器等溫一體化安裝,同時在軌幾何檢校水平也在不斷地提升[1,5]。但是,星上測姿系統誤差往往受星敏感器性能影響,并隨衛星工作模式不同而呈現新的特點。
總結當前敏捷光學衛星的姿態誤差規律,主要有:
(1)低頻誤差,包括星敏感器慢漂和星敏感器與相機間的夾角緩變,這兩種誤差難以區分,均呈現周期性特點。根據在軌星敏感器夾角數據,在一個軌道周期內,星敏感器夾角變化量級達60″,但在一個基線內近似表現為單調、線性的系統誤差特性[2-3,6];
(2)高頻誤差,敏捷光學衛星具有 “動中成像”特點,即為實現高頻次成像,不再像傳統遙感衛星那樣以極高的衛星姿態穩定度成像。這種工作模式造成的姿態“高頻誤差”,其幅值較低,頻率從幾十赫茲到百赫茲量級,最終會引起姿態內插精度的下降。
3 敏捷光學衛星無控制點定位誤差傳播模型
3.1 空間前方交會原理
圖1給出了單線陣立體攝影及定位的原理示意圖。假設M(X,Y,Z)為地面目標點,Sl,Sr,Sr′分別為目標點M在多次成像中對應的像點,其中,Sl與Sr兩次成像構成同側立體成像,Sl與Sr′兩次成像構成異側立體成像。若立體影像的軌道位置與姿態已知,那么根據像點坐標就可以確定這兩條空間直線的交點,即地面點的位置是唯一可確定的。從中可以看出,立體定位的數學基礎是空間前方交會。
采用投影系數法進行空間前方交會,通過對誤差項進行微分,可得到單線陣CCD相機的定位誤差方程[7-8]。
(1)
式中:dX,dY,dZ為目標點M的地面坐標誤差;dXsl,dYsl,dZsl,和dXsr,dYsr,dZsr分別為前、后視攝站的地面坐標誤差;dXcl,dYcl,dZcl和dXcr,dYcr,dZcr分別為目標點M在前、后視像點的空間坐標誤差;dBy為攝影基線在Y方向的誤差分量;Nl,Nr和dNl,dNr分別為前、后視像點投影到地面上點的投影系數及其誤差。
圖1 立體觀測原理示意圖
Fig.1 Stereo mapping diagram
3.2 系統和隨機姿態誤差的聯合傳播模型

令ω,φ,κ為衛星滾動、俯仰和偏航3個姿態角元素,其誤差dω,dφ,dκ可表示為式(2)的形式。
(2)
式中:dωl,dφl,dκl和dωr,dφr,dκr分別為前、后視星敏感器姿態測量誤差,ml,nl,ol和mr,nr,or分別為前、后視星敏感器姿態測量誤差系數。
以dω為例,由于dωl和dωr均包含高頻中誤差σ(獨立的隨機誤差)和低頻中誤差ε(系統誤差),根據誤差傳播理論[10],星敏感器姿態測量誤差dω對定位中誤差的傳播規律為
(3)

高頻隨機姿態誤差和低頻系統姿態誤差對定位精度的影響可以用圖2表示,由圖2可知:
(1)對于高頻隨機姿態誤差,前后視姿態誤差之間存在相對誤差Δσ,對平面和高程均產生誤差,如圖2(a)所示。
(2)對于低頻系統姿態誤差,當衛星采用異側立體觀測,誤差系數ml和mr的符號相反,從而對高程誤差產生相消的結果,如圖2(b)所示; 對于同側立體觀測,誤差系數ml和mr的符號相同,從而對高程誤差產生累加的結果,如圖2(c)所示;對平面則均產生誤差。
根據資源三號衛星的設計參數[9],采用本文誤差分析模型可知,星上應存在6″左右的緩變系統性姿態誤差,這種誤差通過一次在軌標定很難去除。
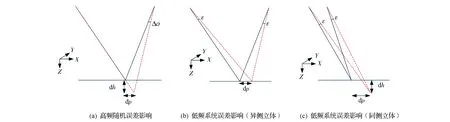
圖2 高頻和低頻誤差對定位精度影響示意圖Fig.2 High-frequency and low-frequency errors applying to the locating diagram
3.3 考慮設計參數的姿態穩定度誤差模型
(1)當衛星姿態不存在高頻大幅值變化時,可以用線性內插進行插值;
(2)姿態角速度誤差短時間內可以用衛星姿態穩定度表征。
成像任意時刻ti對應的姿態可表示為
(4)
式(4)的誤差方程為
(5)
從式(5)可以看出,衛星任意行插值姿態精度與衛星姿態穩定度及測姿頻率相關。當不滿足兩個前提時,則會產生“高頻姿態誤差”。為此,敏捷光學衛星應盡可能通過星上隔振措施降低振動幅值,同時采用高頻高精度測姿設備對姿態抖動進行測量。
4 誤差規律分析與驗證
4.1 仿真參數
下文對姿態測量誤差及姿態穩定度、測量姿態輸出頻率等因素分別進行分析。為了便于討論和仿真分析,根據當前技術和硬件發展水平,設定一組參數,如表1所示。
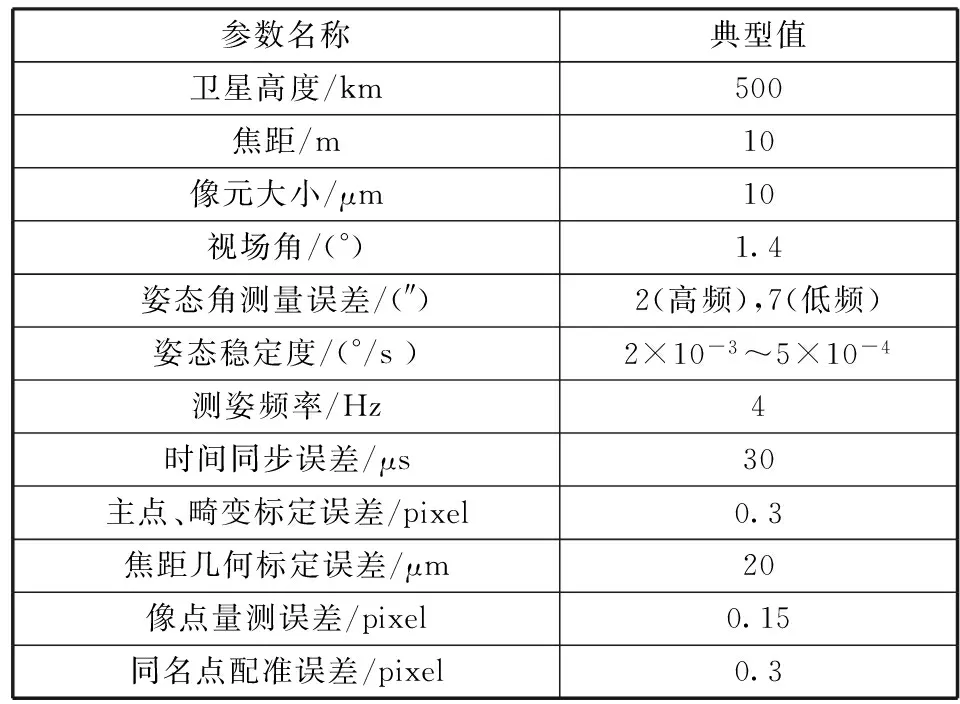
表1 衛星參數及誤差典型值
4.2 不同交會條件下低頻誤差對定位精度的影響規律
下面根據表1 參數,改變低頻誤差值,保持其他誤差不變,可得到低頻誤差對定位精度的影響規律。
從圖3~圖5可以看出:
(1)隨著姿態低頻誤差的增大,平面定位誤差隨之增大;
(2)姿態低頻誤差對高程誤差的影響則根據立體觀測模式的不同有不同的影響規律:①對于對稱式的異側立體成像,低頻誤差對高程誤差幾乎無影響;②對于非對稱式異側立體成像,低頻誤差對高程誤差存在緩慢增長影響;③對于同側立體成像,低頻誤差對高程誤差則有著類似于平面誤差一樣的影響。
這與式(3)的理論分析是一致的。
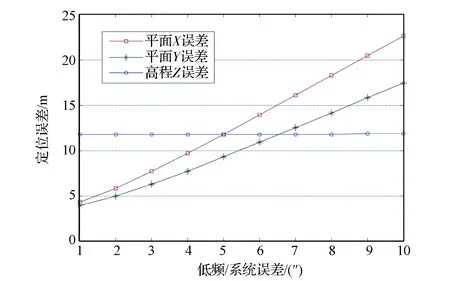
圖3 異側對稱立體(前視15°,后視-15°)觀測下低頻誤差對定位精度的影響規律Fig.3 Influence law of low-frequency error(forward-looking 15°and backward-looking -15°)on the locating accuracy by the side symmetric stereo imaging
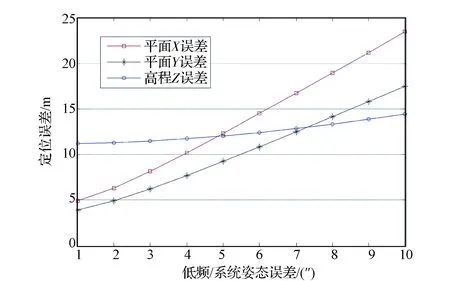
圖4 異側非對稱(前視25°,后視-5°)立體觀測下低頻誤差對定位精度的影響規律Fig.4 Influence law of low-frequency error (forward-looking 25° and backward-looking -5°) on the locating accuracy by the side asymmetric stereo imaging
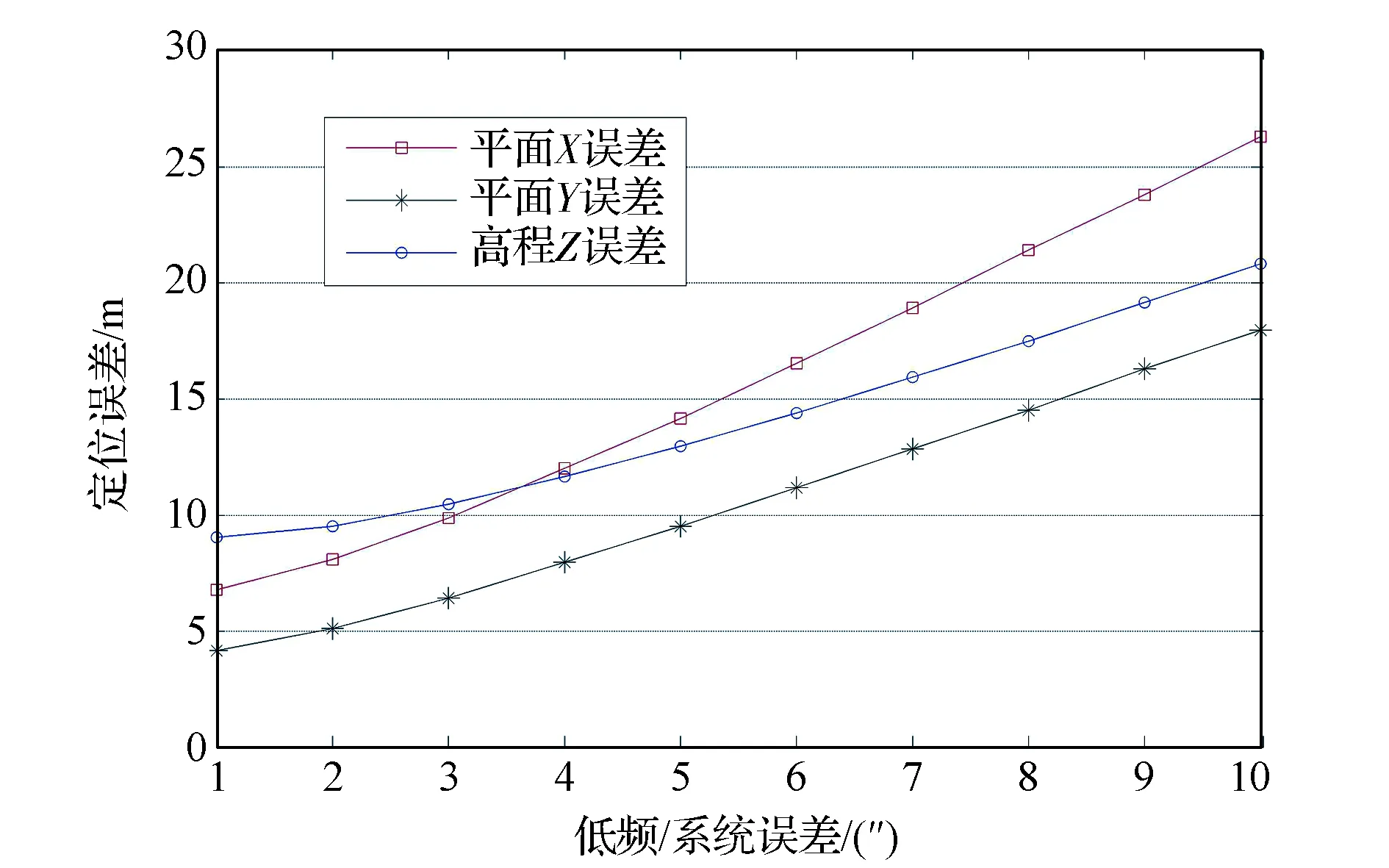
圖5 同側立體(前視35°,后視5°)觀測下低頻誤差對定位精度的影響規律Fig.5 Influence law of low-frequency error (forward-looking 35° and backward-looking 5°) on the locating accuracy by the stereo imaging on the same side
4.3 不同姿態輸出頻率下姿態穩定度對定位精度的影響規律
根據表1 參數設置,利用本文定位精度評估模型,圖6給出了基高比為0.53(俯仰±15°),改變姿態穩定度誤差值,保持其他誤差值不變時,對定位精度影響規律。從圖6中可看出,隨著衛星姿態穩定度的下降,定位精度也下降,尤其是高程誤差受姿態穩定度影響較大。
根據式(5),在姿態穩定度不佳的情況下,增加星敏感器的測量頻率或者配置高精度的高頻率的相對姿態測量設備,可實現姿態測量精度不變但以更高姿態測量頻率提高每行數據的姿態精度,從而提高定位精度(但值得說明的是,當星上存在微振動時,則必須以高于其特征頻率的測姿設備才能復原出姿態的抖動)。
圖7為衛星姿態穩定度為0.01(°)/s條件下,不同測姿頻率下的定位誤差規律,可以看出:隨著測量姿態輸出頻率的提高,對定位精度提升的幅度高程Z>平面XY,當整星測姿頻率為32 Hz時,其高程定位精度相比4 Hz提高了約75%,然而當測姿頻率不斷提高至200 Hz甚至10 000 Hz時,定位精度趨于穩定。
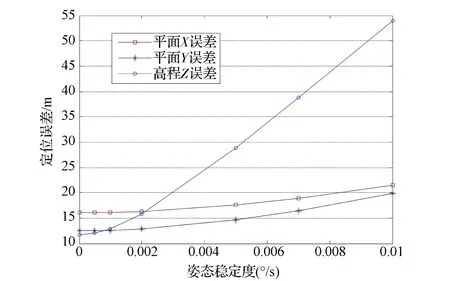
圖6 姿態穩定度對定位精度影響規律(4 Hz測姿)Fig.6 Influence law of attitude stability on the locating accuracy (4 Hz attitude measuring)
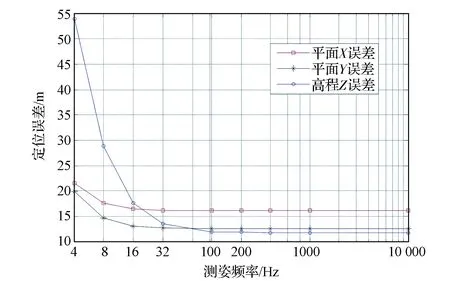
圖7 測姿頻率對圖像定位誤差的影響規律(姿態穩定度為0.01 (°)/s時)Fig.7 Influence law of attitude measuring frequency on the locating accuracy (attitude stability: 0.01(°)/s)
5 無控制點圖像定位誤差分配及精度預估
5.1 誤差分配方案一
根據本文提出的定位精度預估模型,可以得到在表1 參數和誤差水平下的衛星無控制點定位精度,如表2所示。數據顯示:當平面定位精度要求30 m量級時,星敏感器低頻誤差和夾角穩定性不需要在現有衛星水平上加嚴控制,但是應盡量采用大基高比異側立體成像方式,避免系統性角元素誤差帶來額外的高程誤差。
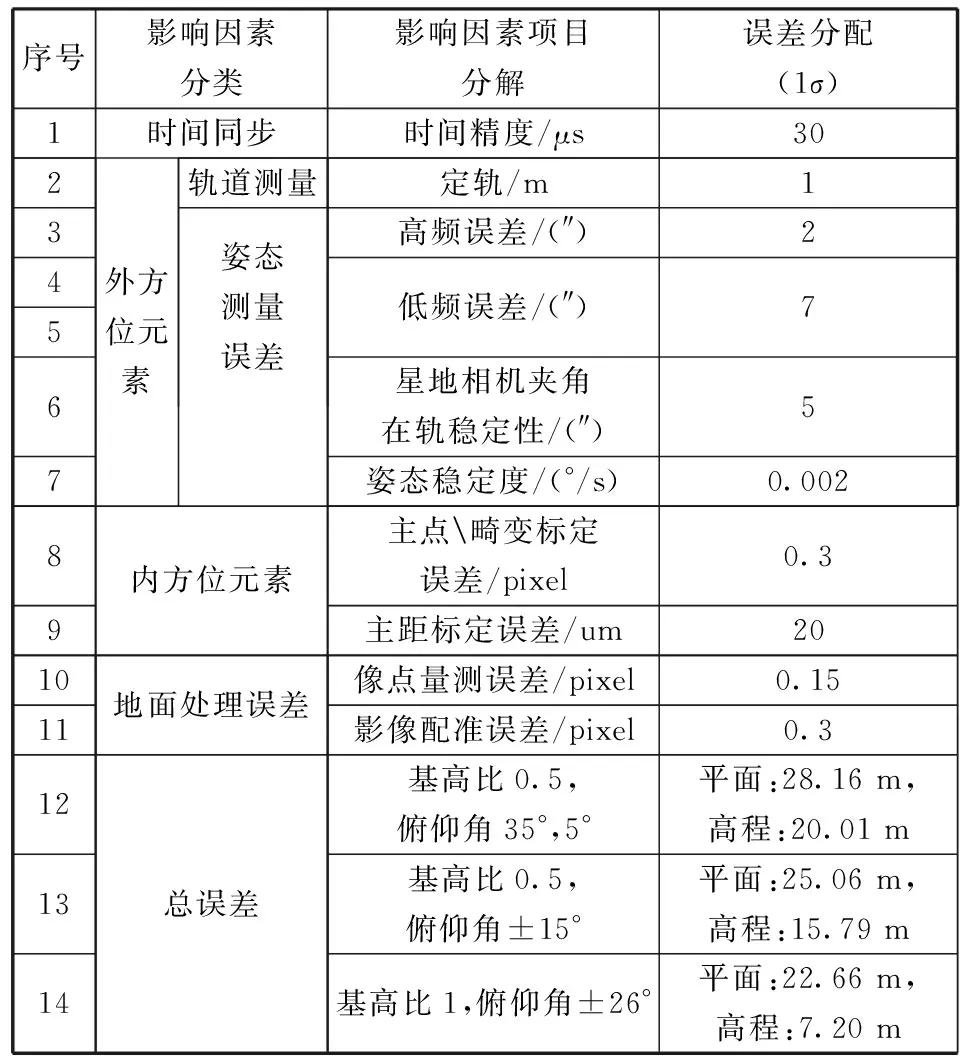
表2 無控制點圖像定位誤差預估(方案一)
5.2 誤差分配方案二
為了滿足1:50 000比例尺測繪制圖的定位精度(平面15 m,高程6 m(1σ)[7])要求,可采取如下措施:
(1)采用甚高精度高頻角位移測量設備實現高頻、高精度姿態測量,如日本先進對地觀測衛星(ALOS)采用三臺高精度的星敏感器(9″,3σ)結合慣性陀螺和附加的高精度(均方根誤差0.01″)角位移測量傳感器,通過聯合姿態確定算法,使衛星的姿態確定精度達到了在軌處理為1.08″,地面事后處理為0.5″的水平[11]。同時,測姿頻率實現大于200 Hz,可消除姿態穩定度不高引起的誤差。
(2)采用高精度夾角記錄裝置對星敏感器/相機夾角進行在軌測量。為了保證在軌無控定位精度要求,采取在軌實時測量方法,對相機與星敏感器視軸間夾角變化測量。地面處理時利用在軌測量數據對夾角相對幾何關系進行標校,減小基準轉換過程中引入的誤差。
通過表3誤差分配和定位精度預估可知,采用以上兩個途徑,星敏感器高頻誤差滿足0.9″,低頻誤差有效控制在5″以內,即可以實現1:50 000比例尺的測繪制圖的定位精度。
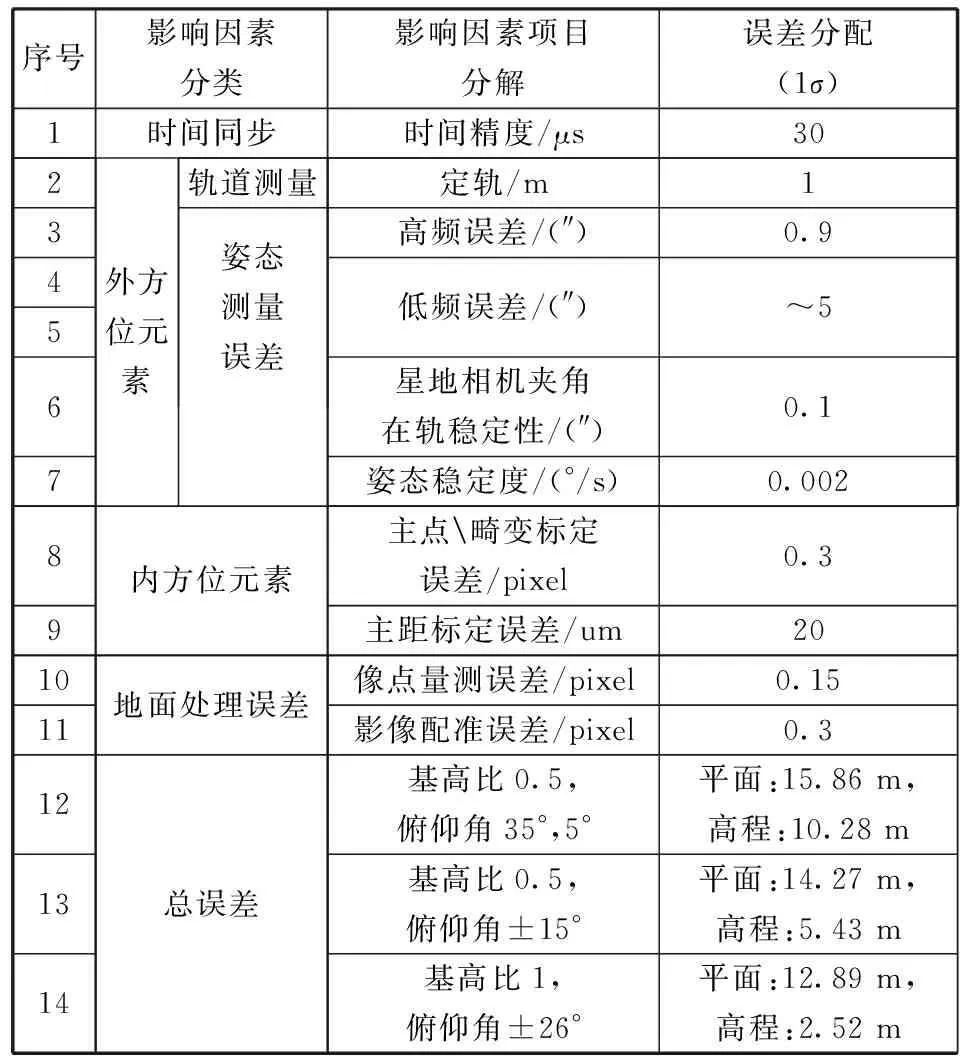
表3 無控制點圖像定位誤差預估(方案二)
6 結論
對于當前我國國產衛星的制造和設計水平的發展現狀,影響定位精度的關鍵問題在于姿態角元素的低頻和緩變誤差以及因敏捷衛星穩定度下降帶來的姿態插值精度下降。本文針對立體測繪中的姿態誤差規律進行了分析,建立了區分高頻和低頻緩變誤差、同時考慮設計參數的誤差傳播模型,進行了誤差傳播規律分析和定位精度指標分析。針對主要環節提出了相應措施。得出結論如下:
(1)當衛星采用異側立體觀測,前后視的低頻緩變誤差對高程誤差產生相消的結果,而對于同側立體觀測,前后視的低頻緩變誤差對高程誤差產生累加的結果。當前在軌測繪衛星如資源三號,星上應存在6″左右的緩變系統性姿態誤差,這種誤差通過一次在軌標定很難去除。
(2)在姿態穩定度不佳的情況下,限制星上微振動幅值、采用高精度相對測量設備并增加姿態測量頻率可以提高每行數據的姿態精度,從而提高定位精度。隨著測姿頻率的提高,對定位精度提升的幅度高程Z>平面XY;當整星測姿頻率為32 Hz時,其高程定位精度相比4 Hz提高了約75%,然而當測姿頻率不斷提高至200 Hz甚至10 kHz時,定位精度趨于穩定。
(3)當平面定位精度要求30 m量級時,星敏感器低頻誤差和夾角穩定性不需要在現有衛星水平上加嚴控制,但是應盡量采用大基高比異側立體成像方式,避免系統性低頻姿態誤差帶來額外的高程誤差。當精度要求滿足1:50 000時,可以通過采用高頻姿態測量設備和夾角檢測裝置兩種措施,同時將低頻誤差有效控制在5″以內,以滿足測繪要求。
References)
[1]李德仁,張過,蔣永華,等,國產光學衛星影像幾何精度研究[J].航天器工程,2016,25(1):1-9
Li Deren,Zhang Guo,Jiang Yonghua,et al. Research on image geometric precision of domestic optical satellites [J]. Spacecraft Engineering,2016,25(1):1-9 (in Chinese)
[2]王仁享,胡莘,王建榮.天繪一號無地面控制點攝影測量[J].測繪學報,2013,42 (1):1-5
Wang Renxiang,Hu Xin,Wang Jianrong. Photogrammetry of mapping satellite-1 without ground control points[J]. Acta Geodaetica et Cartographica Sinica,2013,42(1):1-5 (in Chinese)
[3]王任享,王建榮,胡莘.在軌衛星無地面控制點攝影測量探討[J].武漢大學學報·信息科學版,2011,36(11):1261-1264
Wang Renxiang,Wang Jianrong,Hu Xin. Photogrammetry of in-flight satellite without ground control point [J]. Geometrics and Information Science of Wuhan Univer-sity,2011,36(11):1261-1264 (in Chinese)
[4]夏中秋,黃巧林,何紅艷,等.高分辨率光學遙感衛星集合鏈路定位精度分析[J].航天返回與遙感,2016,37(3):111-119
Xia Zhongqiu,Huang Qiaolin,He Hongyan,et al. Analysis of geolocation accuracy of high resolution optical remote sensing satellite geometric chain[J]. Spacecraft Recovery & Remote Sensing,2016,37(3):111-119 (in Chinese)
[5]金濤,李貞,李婷,等.提高光學遙感衛星圖像幾何精度總體設計分析[J].宇航學報,2013,34(8):1159-1165
Jin Tao,Li Zhen,Li Ting,et al. System design and analysis for improving geometric accuracy of high-resolution optical remote sensing satellite image [J]. Journal of Astronautics,2013,34(8): 1159-1165 (in Chinese)
[6]王仁享,王建榮,胡莘.衛星攝影姿態測定系統低頻誤差補償[J].測繪學報,2016,45(2):127-130
Wang Renxiang,Wang Jianrong,Hu Xin. Low-frequency errors compensation of attitude determination system in satellite photogrammetry [J].Acta Geodaetica et Cartographica Sinica,2016,45(2): 127-130 (in Chinese)
[7]王任享. 三線陣CCD 影像衛星攝影測量原理[M].北京:測繪出版社,2006:1-60
Wang Renxiang. Satellite photogrammetric principle for three-line-array CCD imagery[M]. Beijing: Surveying and Mapping Press,2006:1-60 (in Chinese)
[8]智喜洋,張偉,曹移明,等,單線陣CCD 相機定位精度評估模型及幾何誤差研究[J].光學技術,2011,37(6):669-674
Zhi Xiyang,Zhang Wei,Cao Yiming,et al. Study on positioning accuracy assessment model and geometric errors for single-linear-array CCD camera[J]. Optical Technique. 2011,37(6): 669-674 (in Chinese)
[9]蔣永華,張過,唐新明,等. 資源三號測繪衛星三線陣影像高精度幾何檢校[J]. 測繪學報,2013,42(4):523-529
Jiang Yonghua,Zhang Guo,Tang Xinming,et al.High accuracy geometric calibration of ZY-3 three-line image[J]. Acta Geodaetica et Cartographica Sinica,2013,42(4):523-529 (in Chinese)
[10]武漢大學測繪學院測量平差學科組.誤差理論與測量平差基礎[M].武漢:武漢大學出版社,2003
Surveying Adjustment Discipline Groups of Surveying and Mapping School of Wuhan University. Theory and measurement error adjustment[M].Wuhan:Wuhan University Press,2003(in Chinese)
[11]Gruen A,Zhang L. 3D Processing of high-resolution satellite images[C]// Busan,Asian Conference on Remote Sensing 2003. Korea:ACRS,2003:390-394
(編輯:李多)
Discussion of Geo-location Accuracy Increasing Methods of Agile Satellite Without Ground Control Points
LI Zhen JIN Tao LI Ting YANG Dong
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
In light of geo-location accuracy of the agile optical satellite,this paper proposes a fine locating propagation model which distinguishes the high-frequency and low-frequency attitude errors,as well as considering the system design parameters. By the simulation analysis,the influence law of the low-frequency error and attitude stability error to the final location accuracy is presented. Taking the 30m location accuracy and the map scale of 1∶50 000 as an example,the value of index is analyzed and the methods of increasing geo-location accuracy is put forward. The result is that the low-frequency errors mainly impact the horizontal geo-location accuracy. The 30m accuracy would be met with no more control to the attitude problem,but only imaging with larger and symmetric intersection angles. If the satellite attitude measurement accuracy reaches 0.9″and the 200 Hz high-frequency attitude measurement equipment and the on-orbit angle measurement equipment are used between the star track and the camera,also with the control of the low-frequency errors within 5″,the accuracy for the map scale of 1∶50 000 (plan 15m and height 6m) would be met.
agile optical satellite; without ground control points; locating accuracy; low-frequency errors; attitude interpolation; attitude stability
2016-09-22;
2016-11-08
國家重大航天工程
李貞,女,碩士,工程師,從事航天器有效載荷總體設計、光學遙感衛星幾何定位精度總體設計等研究工作。Email:schnappilee@foxmail.com。
P236
A
10.3969/j.issn.1673-8748.2016.06.005
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00