基于改進式接受腔的肌電采集可行性方法研究
2017-01-04 12:24:30李彩萍穆廣寧
河北工業大學學報 2016年2期
關鍵詞:實驗
郭 欣,李彩萍,穆廣寧
(河北工業大學 控制科學與工程學院,天津 300130)
基于改進式接受腔的肌電采集可行性方法研究
郭 欣,李彩萍,穆廣寧
(河北工業大學 控制科學與工程學院,天津 300130)
針對從下肢殘肢端不易記錄高質量肌電信號的問題,提出了一種在接受腔內嵌入無線傳感器采集肌電信號的實驗方法.讓健康受試者在穿戴定制的接受腔和未穿戴此裝置的情況下,分別采集右側下肢股直肌、闊筋膜張肌、半腱肌,股二頭肌四塊肌肉在5種典型行走模式下的表面肌電信息,并對肌電信號進行時域特征提取,構建特征向量,并采用閾值分割 SVM-KNN算法對五種行走模式進行識別,得出2種情況下的平均識別率,發現和目前研究領域健康人行走模式的識別率相接近,從而驗證了嵌入無線傳感器接受腔的可行性,然后把該嵌入無線傳感器式接受腔應用于殘肢肌電信號的采集上.
肌電信號;嵌入無線傳感器式接受腔;識別率;可行性
0 引言
人體下肢的運動是在中樞神經系統的支配下通過身體肌肉收縮實現的,其具有較好的周期性和重復性.肌電信號最大的優點是大腦意識的反映,相比其他運動信息,其更能體現人的運動意圖.因此,利用肌電信號識別人體步態已成為國內外研究的熱點.而且,肌電信號采集的質量以及肌肉位置的選取直接影響識別結果的準確性[1].
對于單側脛股截肢者而言,采集并記錄其殘肢端的肌電信號,可以顯示非常豐富的神經肌肉信息,這對臨床評估和智能假肢控制具有重要意義.比如,在臨床上,已知殘肢肌肉激活模式,有利于高效地評估下肢截肢者的步態[2].
記錄高質量的肌電信號對智能假肢控制是非常必要的[2].但是,從膝上截肢者的殘肢端獲取可靠的肌電信號,研究者和臨床醫生面臨重大的挑戰,在接受腔中插入傳感器可能產生大面積的壓迫和與殘肢間的摩擦,在行走時會引起不適;一些減輕摩擦和壓力的方法又可能會導致接受腔松弛,使在正常步行期間,殘肢在接受腔內活動,在肌電信號記錄的過程中引起嚴重的運動偽跡,由于電極的不連續接觸會導致肌電數據的丟失[2].為了解決這些問題,已有學者為截肢受試者設計了嵌入無線傳感器式接受腔,在保證舒適度的前提下,從殘肢采集一些高質量的肌電信號,其中采集設備為美國Delsys公司開發的無線傳感器Trigno Wireless EMG.
本文將模擬截肢受試者穿戴假肢時的情境,為健康受試者定制類似的嵌入無線傳感器式接受腔,可以仿真截肢者行走時的承重以及受力情況,采集穿腔與不穿腔在5種典型路況下不同肌肉的肌電信號,然后分析得到穿腔采集的肌電信號對后續的識別不造成影響,最后驗證利用此嵌入無線傳感器式接受腔從殘肢側獲取高質量肌電信號的可行性.
1 設計嵌入無線傳感器式接受腔
上述提到的為健康受試者定制的嵌入無線傳感器式接受腔得到了國家康復輔具研究中心的認可和支持.實驗選取一名男性健康受試者,其無下肢關節損傷(開放性和閉合性)、無心血管疾病、無皮膚過敏、無肌肉骨骼等病史,年齡24歲,身高182 cm.定制的嵌入傳感器式接受腔如圖1所示.為健康受試者右腿制作嵌入無線傳感器式接受腔的過程為:
1)根據sEMG信號的強弱來確定所選取肌肉的位置,并做標記;
2)為上述無線傳感器做模型;
3)將做好的傳感器模型放在標記點處;
4)用保鮮膜將受試者的腿纏住,并用石膏繃帶取型;
5)取型之后進行固化,取模;
6)將模型進行熱縮成型;
7)受試者試穿成型接受腔;
8)根據試穿后的舒適程度進行修型,調整;
9)受試者穿戴定制好的接受腔.
2 信號采集與分析
2.1 肌電信號的采集
在實驗之前,健康受試者了解整個實驗流程,確保其正確理解實驗操作.受試者需要剃去股直肌、闊筋膜張肌、股二頭肌以及半腱肌4塊肌肉肌腹位置的體毛,然后用酒精打磨相應的位置以去除角質層,以便更好地采集肌電信號.

圖1 定制的嵌入傳感器式接受腔Fig.1 Customed socketw ith sensorembedd
在穿戴如圖1所示的接受腔時,先把DELSYS無線傳感器放入腔內的相應位置,傳感器的箭頭與肌纖維方向平行,然后用橡皮泥把之間的縫隙進行填充,保證無線傳感器與皮膚充分接觸.受試者在進行實驗前,充分熟悉動作要領,進行2~3次熟悉性操作.在測試者的指導下,受試者在平地、上樓梯、下樓梯、上坡、下坡5種模式下進行實驗,實驗共分為2次進行,隔一天實驗一次.每次每種模式采集10組數據(即股直肌、闊筋膜張肌、半腱肌、股二頭肌的肌電信息),每采集5組數據,受試者休息5分鐘,放松腿部肌肉,防止產生肌肉疲勞,影響信號質量[3].其中,每種行走模式下受試者都是先邁對側腳(即左腳),完成3個完整的步態周期.交替上、下樓梯時,每次實驗過程都是6個臺階,每個臺階的高度為廣泛應用的15 cm;在上、下坡時,均為無障礙通道的坡,斜坡長均為3.6 m,坡的角度大約為16°.在數據采集過程中,EMG智能傳感器和Trigno基站之間通過Zigbee模塊進行無線通信,Trigno基站與電腦之間則通過USB2.0接口實現數據傳輸.
同樣,健康受試者在不穿戴接受腔時,首先確定與之前實驗相對應的4塊肌肉的位置,然后使用與銀質檢測條匹配的雙面膠將傳感器固定在清理好的皮膚處,實驗分為3次進行,隔一天實驗一次,每次每種模式采集10組數據.其他實驗條件均相同.
2.2 肌電信號的處理
由于采集的肌電信號是由許多不同頻率的正弦波組成的,其正相值和負相值得加和應該趨于零[4].肌電信號十分微弱,一般僅有1~10mV左右,有用信號分布在1~500 Hz頻率范圍之間,主要能量分布在50~150Hz頻率范圍內.通常,由體表直接檢測到的肌電信號混有工頻干擾、基線漂移、環境噪聲、運動干擾等多種噪聲信號,嚴重影響肌電信號的質量[5].為了提高表面肌電信號的信噪比,抑制噪聲,需對肌電信號進行預處理,利用巴特沃斯濾波器提取20~450Hz的肌電信號,并利用陷波器陷去50 Hz及其倍頻干擾信號.圖2為受試者穿腔下坡過程采集到闊筋膜張肌原始sEMG以及預處理之后的sEMG.可以看到處理后大量的噪聲被去除掉,更利于后續信號的分析.

圖2 穿腔下坡時TFL原始信號以及濾波之后的信號Fig.2 Originaland filtered signalsw ith the socket-sensor for downslop
2.3 肌電信號特征提取
2.3.1 特征提取
特征提取是從信號中提煉出最能表征信號特點的成分,可以看成是高維數據空間到低維數據空間的一種映射.特征提取作為模式識別中的關鍵環節,直接影響系統識別能力.表面肌電信號的特征提取就是提取最能表征肌電信號固有特性的數據,盡可能達到不同動作提取的特征區別較大,差異明顯[6].
特征提取的方法主要有時域法、頻域法、時頻結合、高階譜和混沌與分形等方法,本文選用計算簡單,明了直觀的時域法.本文選取適合用于人體行走模式識別研究的時域特征值.由于信號平均值(MEAN)表示一段表面肌電信號的平均強度,也能體現出肌肉的動作強度;均方根(RMS)能夠反映信號的平均功率,同時也可以用來衡量表面肌電信號的功率,代表了能量信息,在一定程度上體現了各塊肌肉組織在動作完成過程中的貢獻[7];標準偏差(STD)是一種量度數據分布分散程度的標準,用以衡量數據值偏離算術平均值的程度[8].因此,在這里選擇平均值、均方根、標準偏差3個特征向量用于人體行走模式識別的研究.
2.3.2 構建特征向量
由于平均值、均方根在不同路況下區分較為明顯,標準偏差可以較好的識別上樓梯和上斜坡.所以,最終選4塊肌肉表面肌電信號的平均值、均方根和標準偏差作為特征值,構建特征向量如下.

肌肉順序依次是半腱肌、股直肌、闊筋膜張肌、股二頭肌.
分別對受試者穿腔和不穿腔時所采集到的4塊肌肉不同行走模式下全部進行特征提取后,隨機選取每種模式下一組特征向量進行比較.如圖3所示,分別為受試者未穿腔時以及穿腔時不同模式特征向量對比.
如圖3所示,在穿腔與未穿腔的情形下,每一種模式下的特征向量都不會發生質的變化,只是在一定的小范圍內波動.即:無論是否穿腔,平地模式下特征向量的每個元素值都偏小,上樓梯和上坡模式下的特征向量元素都偏大,下樓梯和下坡模式下特征向量的每個元素的幅值介于上述二者之間.
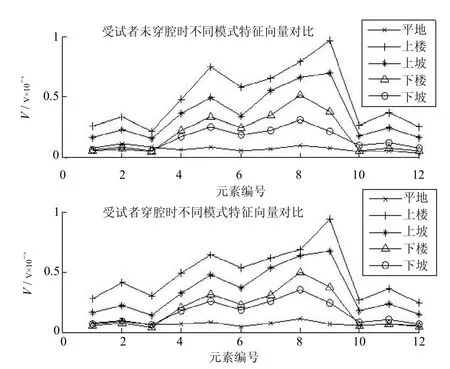
圖3 受試者未穿腔時以及穿腔時不同模式特征向量對比Fig.3 The comparison of featurevector in differentpatternsw ith orw ithoutsocket
3 基于閾值分割的SVM-KNN算法
支持向量機利用核函數的非線性變換將線性不可分低維輸入映射到高維特征空間,在高維空間尋找一個最優超平面使得相距最近的兩類樣本的距離最大[9].K近鄰算法分類時,自待測樣本開始生長,擴大區域直至將k個訓練樣本包含,訓練樣本中出現次數最多的類別即為待測樣本的類別.SVM對距離分類平面較遠的樣本分類,結果置信度高,但是對于距離分類平面很近的樣本,置信度降低導致出錯概率大大增加;KNN方法依靠臨近樣本,對交叉類域或有重疊的樣本分類更有優勢[10].綜合2種算法優勢,對SVM分類結果的置信度設置閾值,采用基于閾值分割的SVM-KNN算法進行識別.
1)選用RBF高斯徑向基核函數,采用一對一法,構建10個SVM子分類器,則每個子分類器的最優超平面的分類函數為

2)每個待分類樣本將得到10子分類器的判定結果和決策值,利用投票選舉方法,得票最多的類別即為此待分類樣本所屬類別,利用如下公式確定此分類結果的置信度

4 實驗結果及分析
實驗共獲取750組特征向量樣本,其中未穿戴接受腔450組,穿接受腔300組.隨機選取未穿腔時150組樣本的特征向量作為訓練集對基于閾值分割的SVM-KNN分類器進行訓練,其中每種模式隨機選取30組.將訓練好的分類模型對剩余600組樣本的特征向量組成的測試集進行測試,其中穿腔與未穿腔時平地、上樓、下樓、上坡、下坡各60組.其中,把剩余未穿腔的300組樣本記為A組,把穿腔的300組樣本記為B組.實驗針對股直肌、股二頭肌、闊筋膜張肌、半腱肌4塊肌肉的組合進行特征提取和識別.本文以混淆矩陣M表示實際類別和預測類別之間的聯系,定義如下
式中元素意義如下

表1列出了A、B 2組的混淆矩陣,表征數據樣本實際類別和預測類別之間的聯系.如圖4為識別結果對比圖.
表1、兩組識別率的混淆矩陣Tab.1 The confusionmatrix ofandin recognition rate
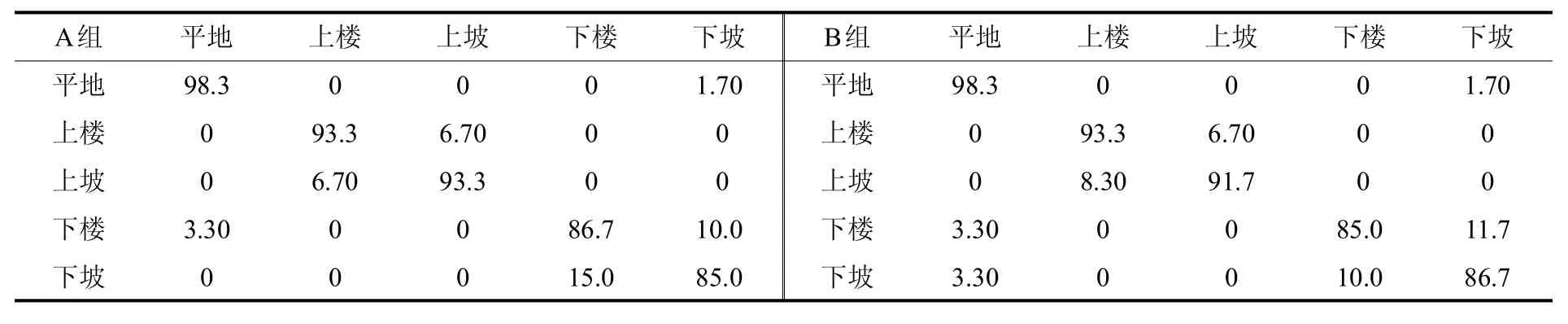
表1、兩組識別率的混淆矩陣Tab.1 The confusionmatrix ofandin recognition rate
A組 平地 上樓 上坡 下樓 下坡 B組 平地 上樓 上坡 下樓 下坡平地 9 8 . 3 0 0 0 1 . 7 0 平地 9 8 . 3 0 0 0 1 . 7 0上樓 0 9 3 . 3 6 . 7 0 0 0 上樓 0 9 3 . 3 6 . 7 0 0 0上坡 0 6 . 7 0 9 3 . 3 0 0 上坡 0 8 . 3 0 9 1 . 7 0 0下樓 3 . 3 0 0 0 8 6 . 7 1 0 . 0 下樓 3 . 3 0 0 0 8 5 . 0 1 1 . 7下坡 0 0 0 1 5 . 0 8 5 . 0 下坡 3 . 3 0 0 0 1 0 . 0 8 6 . 7
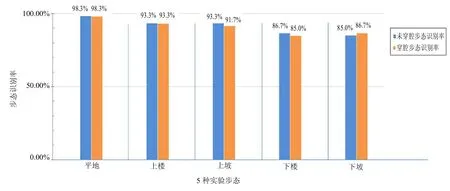
圖4 單側膝上截肢受試者的嵌入式傳感器接受腔Fig.4 The socket-sensor configuration of unilateralabove-kneeamputee
通過表1可以計算得到,A組的平均識別率為91.3%,B組的平均識別率為91.0%.也就是說,A組在300組樣本中識別正確的組數為274組,而B組在300組樣本中識別正確的組數為273組.實驗結果表明,在只考慮4塊大腿肌肉的情形下,A,B 2組的平均識別率都達到了91%以上.目前,有研究表明用基于閾值分割的SVM-KNN分類算法,對健康受試者下肢大腿4塊肌肉的特征向量進行識別,其識別率達到94%[10].本實驗過程,由于對肌肉種類的選取受到了一定的限制,所以和目前的研究水平還是有一點差距,但是在穿戴定制接受腔和不穿戴的情況下,對不同行走模式的平均識別率基本一致,都達到了91%以上.由此可知,健康受試者在穿戴嵌入式傳感器接受腔之后,對行走模式的識別率不造成影響.因此,該嵌入式傳感器接受腔可以用于采集膝上截肢患者殘端的肌電信息.
5 應用
通過上述分析,可以得到穿戴該嵌入式傳感器接受腔不會對后期的分析識別造成影響.因此,將嵌入式傳感器接受腔應用于膝上截肢患者.首先選取一位膝上截肢受試者,其穿戴假肢的時長為6年,在穿戴假肢時,可以穩定地行走,包括平地、上下樓、上下坡.與健康受試者制作嵌入式傳感器接受腔的過程基本一致,為該膝上截肢受試者定制了嵌入式傳感器接受腔,所選取的肌肉種類和數量相同,并安裝到其假肢上.
同樣,對于該截肢受試者在進行實驗前,充分熟悉動作要領,進行2~3次熟悉性操作.在同樣的實驗條件下,采集其穿戴假肢時5種典型行走模式下的肌電信號.其中采集信號分3次進行,隔天1次,周一、周三、周五上午各1次,每次實驗采集每種行走模式各10組數據,為防止肌肉疲勞,每采集五組數據受試者休息5分鐘,每組數據同樣也是完成3個完整的步態周期.對已獲取的肌電信號進行濾波、特征提取、構建特征向量、用上述SVM-KNN算法對步態進行識別.也是就是說,實驗共獲取截肢受試者450組特征向量樣本,隨機選擇150組數據樣本作為訓練集對基于閾值分割的SVM-KNN分類器進行訓練,其中每種模式隨機選取30組.以平地行走的識別為例,訓練好的分類模型對平地剩余60組平地特征向量樣本組成的測試集進行測試,最終發現對平地行走模式的識別率為81.7%.即:在60組平地特征向量樣本中,有49組樣本識別正確.由于截肢患者本身的肌肉會有損傷和移位,其識別率和健康受試者有一定的差距,但是對于截肢患者來說,此識別結果還是比較滿意的.Huang He等人已經證實該嵌入傳感器式接受腔可以滿足用戶舒適的需求,在此驗證了此裝置在采集肌電信號的可用性.在以后的探索中,還可以選擇增加或改變肌肉的種類,尋找更精確的肌肉位置,從而達到更高的識別率,為控制智能假肢奠定堅實的基礎.
6 結論
主要了闡述健康受試者穿戴嵌入傳感器式接受腔與未穿戴接受腔時肌電信號的采集、處理、分析對比以及模式識別,然后應用到膝上截肢受試者.通過為正常人定制嵌入無線傳感器式接受腔,驗證穿戴此接受腔對后續分析和識別無不利影響.即:穿戴此裝置不會引起肌電信號質上的變化.因此,若想從殘肢端采集到理想的肌電信號,從信號的質量、用者的舒適程度以及可用性而言,可以通過對截肢受試者定制上述的嵌入無線傳感器式接受腔.
[1]LIZ J,WANG B C,Y CG,etal.sEMG-Based Joint Force Control for an Upper-Limb Power-AssistExoskeleton Robobt[J].IEEE Journalof Biomedicaland Health Informatics,2014,18(3):1043-1050.
[2]Hefferman GM,Zhang F,Nunnery M J,etal.Integrationofsurfaceelectromyographic sensorsw ith the transfemoralamputeesocket:A comparison of four differing configuration[J].Prostheticsand Orthotics Internation,2015,39(2):166-173.
[3]趙麗娜,劉作軍,茍斌,等.基于隱馬爾科夫模型的動力型下肢假肢步態預識別 [J].機器人,2014,36(3):337-341.
[4]劉秀云.基于EMG-KJA神經肌骨動力學模型的下肢動作模式識別及運動軌跡預測 [D].天津:天津大學,2012.
[5]De LucaCJ,Gilmore LD,Kuznetsov M,etal.Filtering thesurfaceEMG signal:movementartifactandbaselinenoisecontamination[J].Biomech 2010,43(8):1573-1579.
[6]ZHANG F,HUANGH.SourceSelection forReal-TimeUser IntentRecognition Toward VolitionalControlof Artificial Legs[J].IEEEBiomedical and Health Information,2013,17(5):907-914.
[7]Telfer S,AbbottM,Steultjens M,etal.Dose-response effectsof custom ised footorthoseson lower limbmuscle activity and plantar pressures in pronated foot type[J].GaitPosture2013,38(3):443-449.
[8]陳玲玲,楊鵬,耿艷麗,等.基于肌電信號的膝關節力矩識別方法 [J].中南大學學報:自然科學版,2013,44(2):117-121.
[9]茍斌,劉作軍,趙麗娜,等.基于相關性分析的下肢假肢步行模式預識別方法 [J].東南大學學報:自然科學版,2013,43(S1):192-196.
[10]溫倩.基于表面肌電信號的人體行走模式識別 [D].天津:河北工業大學,2015.
[責任編輯 代俊秋]
The study on the feasibility of the socket-sensor experimentalmethod
GUO Xin,LICaiping,MU Guangning
(Schoolof ControlScienceand Engineering,HebeiUniversity of Technology,Tianjin 300130,China)
Since itis difficult to record high-quality and reliable sEMG(surface electromyographic)signals from lowerlimb amputees,an experimentalmethod of recording sEMG signals from w ithin the sockets of lower-limb amputees is proposed to solve the problem.In this paper,firstly,select lower limb muscle group,including rectus femoris(RF), tensor fasciae latae(TFL),sem itendinosus(SEM)and biceps femoris(BF),thenmakeaspecialsocket-sensorconfiguration for the healthy subjectand collectsEMG signals of the five typicalwalking patternsw ithin orw ithout the socket-sensor configuration.The issueextracted timedomain featureofsEMG atthebeginning ofagait,use the SupportVectorMachine-K NearestNeighbor(SVM-KNN)algorithm based on threshold segmentation and recognized walking pattern.Finally, compareand analyze the rateof recognition,which isclose to the levelin the research field of recognition forwalking patterns.Sowe can know thatcollecting sEMG signals from socket-sensor configuration isvery feasible for lower-limb amputee.
sEMG;socket-sensor configuration;rateof recognition;feasibility
TP391
A
1007-2373(2016)02-0017-06
10.14081/j.cnki.hgdxb.2016.02.003
2015-09-18
國家自然科學基金(61203323);中國科學院人機智能協同系統重點實驗室課題開放基金
郭欣(1976-),男(漢族),教授,博士.
數字出版日期:2016-04-26 數字出版網址:http://www.cnki.net/kcms/detail/13.1208.T.20160426.1557.020.htm l
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55