基于8080總線的拼接屏同步驅動顯示技術
2017-02-17 00:53:58中國民航飛行學院廣漢分院亮中國民航飛行學院空管中心
電子世界 2017年2期
中國民航飛行學院廣漢分院 趙 亮中國民航飛行學院空管中心 鄧 偉
基于8080總線的拼接屏同步驅動顯示技術
中國民航飛行學院廣漢分院 趙 亮
中國民航飛行學院空管中心 鄧 偉
本文介紹了一種基于8080總線的拼接屏同步驅動顯示技術的原理和實現方法。該方法基于標準8080總線協議和拼接屏驅動技術的基本原理,高效利用8080總線接口與拼接屏顯示系統的物理連接關系,通過實時檢測、跟蹤、識別拼接屏顯示系統外圍的驅動信號,在拼接屏顯示系統內部高效的切換命令和數據的流向,達到準確同步顯示靜態圖片和視頻信息的目的。該方法減少了傳統拼接屏顯示系統中復雜的驅動環節,大大提高了整個系統的驅動效率,實現方法簡單有效。在拼接屏顯示系統上的應用結果表明,該方法具有很好的信號捕獲、數據分流和同步顯示功能。
8080總線;拼接顯示屏;數據分流;同步顯示
0 引言
近年以來中小尺寸OLED拼接顯示技術的高速發展,拼接屏驅動顯示技術呈高速發展態勢。在拼接屏顯示系統中,如何使單顯示屏的圖像信息與原始整幅圖像信息保持同步顯示,不僅成為該類系統的核心技術之一,還成為影響該類系統顯示效果的關鍵因素之一。拼接屏顯示系統,是指物理上由兩個以上(含兩個)的顯示終端或者一個顯示終端包含兩套以上(含兩套)的驅動系統拼接而成的顯示系統。該類系統已在超大尺寸電視墻、電子廣告牌等市場領域中得到了廣泛的應用[1]。另外,隨著近年中小尺寸OLED拼接顯示技術的高速發展,拼接屏顯示系統在該領域內也得到了應用和發展。
8080總線全稱為8080并口總線協議,該協議是由Intel公司提出,因此,8080總線也稱為Intel總線。與RGB接口相比,8080接口簡單,控制方便,無需要同步時鐘和同步信號,所以在中小尺寸LCD/ OLED等顯示屏上得到了廣泛應用。一般而言,中小尺寸LCD/OLED均支持8080接口。拼接屏顯示系統常見的數據接口包括:HDMI、LVDS、VGA、RGB和8080等。目前,基于HDMI、LVDS、VGA、RGB接口的拼接屏驅動顯示系統已經得到了廣泛應用[2],本文不做論述。相反,基于8080總線的拼接屏驅動顯示技術卻少有應用和研究。本文基于8080總線協議和拼接屏驅動技術的基本原理,建立數字化可實現模型,詳述具體的實施過程,分析系統關鍵參數選擇方法。本拼接屏驅動系統的顯示終端包含兩套驅動系統,驅動方法適用于具有兩套以上(含兩套)驅動系統的拼接屏顯示系統,易于實現,具有很好的信號捕獲和跟蹤性能,實現了單顯示屏圖像信號與原始圖像信號同步顯示的功能,在拼接屏驅動顯示系統中得到了成功應用。
1 8080總線
1.1 8080接口
8080總線接口包含:復位信號/RST、片選控制信號/CS、數據指令控制信號DC、讀數據控制信號/RD、寫數據控制信號/WR和雙向并行數據信號DB,并行數據位數:8位、9位、16位、18位。8080接口應用電路接口示意圖如圖1所示:

圖1 8080接口示意圖
1.2 8080時序
8080讀寫控制時序由/CS、DC、/RD、/WR和DB信號組合構成,讀寫控制時序如圖2所示。

圖2 8080讀寫時序[3]
其中,/CS、/RD和/WR信號在低電平時有效,在高電平時釋放端口;DC為高電平的時候,DB作為數據信號傳輸,DC為低電平的時候,DB作為命令信號傳輸。
在驅動控制8080總線的過程中,首先拉低/CS信號以使能整個8080總線;然后,當,需要傳輸命令的時候,拉低DC信號,當需要傳輸數據的時候,拉高DC信號。/WR和/RD信號一起控制總線上的數據流向,當/WR為脈沖信號,/RD為高電平的情況下,數據從應用系統流向顯示終端;當/WR為高電平,/RD為脈沖信號的情況下,數據從顯示終端流向應用系統。在命令或者數據傳輸完成后,需要拉高/CS,以釋放整個8080總線。
2 拼接屏同步驅動實現方法
2.1 拼接屏顯示系統
本拼接屏顯示系統框圖如圖3所示:

圖3 拼接屏顯示系統框圖
本系統由8080接口和拼接屏同步驅動顯示端兩大部分構成,在拼接屏同步顯示端包含多個8080分支接口。8080接口向用戶開放,用戶可以通過8080接口驅動后端所有的顯示屏。在系統實現上,本拼接屏同步驅動顯示端包括一片32位MCU(MCU最高工作頻率為80MHZ)和2片LCD(單片分辨率:160RGB×120)顯示屏兩部分,其中,MCU也可用SOC和FPGA代替實現。
MCU一方面完成對用戶端的信號檢測、跟蹤和識別;另一方面,完成對命令和數據的同步分流;最后,完成對后端各個顯示屏的驅動控制。
在總線互聯方式上,系統內部多個8080分支接口與系統外圍8080接口共享同一數據總線;單片LCD除片選CS信號外,其余控制信號也均在同一總線上。很明顯,這種互聯方式,一方面,可以提高軟件系統處理數據的效率;另一方面,也可以節約大量硬件資源、減少系統成本。
2.2 系統流程簡述
本軟件系統首先必須實時檢測、跟蹤并識別8080總線上的命令和數據信號;然后,根據后端顯示屏的不同位置,對命令和數據信息做同步分流,并驅動各顯示屏,最終達到單屏的圖像或者視頻信息與用戶端的整幅圖像或者視頻信息保持同步顯示。
理論上,要跟蹤并同步頻率為fin的信號,則要求系統的工作頻率fsys≥2fin。實際情況下,一方面,由于系統晶振本身存在一定的固有誤差,也即是頻率為fin和fsys的信號本身均會存在一定誤差;另一方面,在嵌入式系統的某一時點,執行的指令周期是不確定的;再一方面,在某一時點上,系統除同步功能外的其他功能所需的時間開銷也不是固定的。所以,要與高速視頻信號保持同步,在軟件系統的設計和同步方法的選擇上,都必須將以上情況考慮在內。在一路8080總線上,如何動態檢測、跟蹤和識別總線上的視頻信號,并對信號數據做同步分流輸出,最終同步驅動后端多顯示屏,將成為本軟件系統的關鍵點。
本拼接屏顯示系統的軟件流程圖如圖4所示:

圖4 軟件流程圖
2.3 實施過程
在實施過程中,通過對8080時序特征的分析和總結,本系統采用端口掃描的方式,利用同步狀態機,對端口信號進行動態檢測和跟蹤;采用時間輪片思想,均衡系統各部分的時間開銷,提高整個系統的工作效率;對WR信號采取特殊循環處理的方式,集中CPU處理能力,檢測和跟蹤WR信號,提高整個系統的同步能力。因為在8080驅動時序中,WR和RD信號的頻率fwr和frd最高,所以,如何同步WR和RD信號就又成為系統同步性能的關鍵點。
如果拼接屏顯示系統的顯示分辨率為H×V,視頻信號幀頻為fv,系統CPU工作的最高頻率為fcpu,那么系統同步檢測周期Tdet必須小于1/( H×V×fv) 才能夠與視頻信號保持同步,即:

Tdet包含機器周期數量Num為:

也即是說,在基于8080總線的拼接屏同步驅動顯示系統中,單同步周期包含的機器周期數量必須小于Num,系統才能夠與WR信號保持同步輸出。這為軟件系統的設計和同步方法的選取,甚至程序指令類型的選擇都提供了有力的理論支撐。單同步周期所需Num越小,系統的同步性能越高。
下邊就以同步WR信號為例,結合本系統的技術參數做詳細說明。
本拼接屏系統包含兩片LCD,單片分辨率為160RGB×120,即整個顯示分辨率為160RGB×240。在播放視頻的情況下,由于輸入視頻的幀頻fv≥25HZ,所以WRin頻率fwr_in≥160×240×25 = 960KHz,即Twr_in=1041ns。這就要求系統單檢測周期必須在1041ns內,即Tdet<1041ns,完成如下功能:讀取單行寫入數據個數,判斷是否需要切換CS分流數據;分別讀取WRin信號的高、低電平,并同步輸出WRout;每輸出一組WRout信號,便對單行寫入數據計數,并判斷是否滿行;每完成單行數據寫入后,對行周期計數,并判斷是否滿幀,如果滿幀,則切換狀態機退出數據同步功能。
系統CPU最高工作頻率為80M(系統機器周期為12.5ns),那么就要求系統在83個機器周期內完成以上功能。這對軟件系統的設計和信號同步方法提出了很高的要求,本系統同步WR信號的工作流程圖如圖5所示。
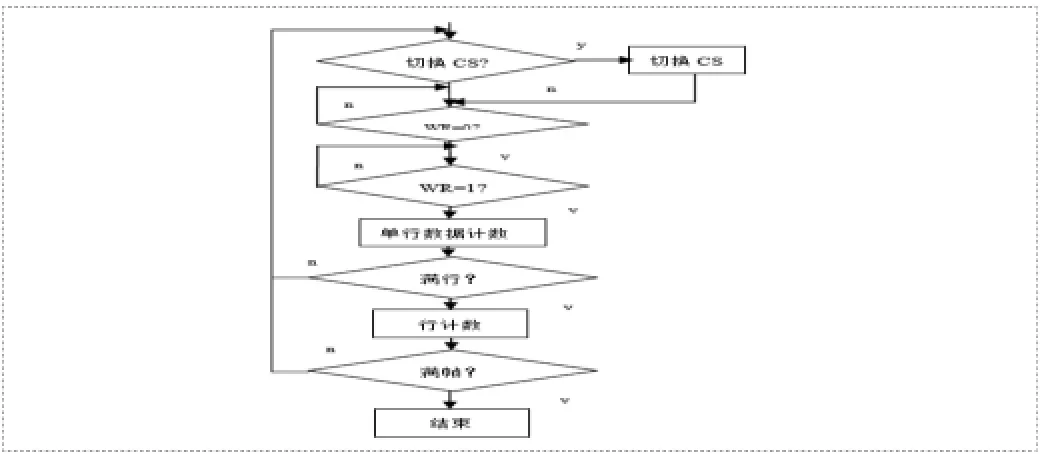
圖5 同步WR工作流程圖
經過測試和驗證,本系統所選的同步方法,可以與速度為2M的WR信號保持同步,大約是960K的2倍,很好的實現了同步播放視頻的功能。
3 拼接屏同步驅動試驗結果
在播放視頻信號的情況下,CS同步輸出波形見圖6和圖7:

圖6 CS同步輸出波形1

圖7 CS同步輸出波形2
可見,行頻fh= 1/ (2 ×64us)= 7.812KHZ,幀頻(CS頻率)fv= 1/21.2ms = 47HZ,遠遠大于視頻播放所需的25HZ幀頻的要求。
WR同步輸出波形見圖8和圖9:

圖8 WR同步輸出波形1

圖9 WR同步輸出波形2
可見,像素時鐘頻率(WRin頻率)達到2MHZ,同步輸出時鐘WRout延后WRin150ns同步輸出,很好的實現了對視頻信號時鐘同步輸出的功能。
以圖10作為上屏顯示意圖的原始圖像,上屏顯示圖像見圖11,其中有藍色橫線區域為單屏1,有紅色橫線區域為單屏2:

圖10 原始圖像

圖11 上屏顯示圖像
試驗結果表明,本軟件系統和信號同步方法準確的完成了對8080總線各種信號的檢測、跟蹤和識別,并且在后端拼接顯示屏上,高效的完成了對高速視頻數據流的同步分流,最終達到了單屏的視頻信息與用戶端的視頻信息保持同步顯示的目的。
[1]浦廷民.大屏幕顯示系統的應用與分析[J].智能建筑電氣技術,2011,3.
[2]陳楊輝.液晶拼接——大屏顯示市場一道亮麗的風景[J].中國安防,2013,06.
[3]熊文彬,蔣泉,于軍勝,蔣亞東.基于單片機的全彩OLED驅動控制電路[J].光電子技術,2010,03.

表2 語音識別測試表
從表中可以看出,LD3320語音識別正確率可達90%左右,并且音量增益與識別正確率成“∩”關系,這是因為音量增益過大或過小,會導致麥克風對聲音采集過于靈敏或遲鈍,從而影響識別率。通常家具照明控制的有效范圍為1~3米,增益可設置在0x55~0x80。
5 結論
本文利用基于非特定人的語音識別芯片LD3320設計了一套智能LED照明系統,選用STM32F103ZET6作為主控制器,SPI作為通信接口,實現了語音命令智能調節LED燈的亮度功能,有效提高了家居照明智能化水平,并通過實驗證明,LD3320音量增益的大小對語音識別率的影響。本文具有潛在的研究和應用價值。
參考文獻
[1]蔣偉明.中國智能家居的現狀及發展趨勢[J].科技視界,2014(18): 326-326.
[2]何湘智.語音識別的研究與發展[J].計算機與現代化,2002(3):3-6.
[3]趙力.語音信號處理(第二版)[M].北京:機械工程出版社,2014:32-86.
[4]陳杰,張玲華,吳璽宏.基于小波包-LPCC的說話人識別特征參數[J].南京郵電大學學報:自然科學版,2007,27(6):54-56.
[5]Fang Zheng,Guoliang Zhang,Zhanjiang Song.Comparison of Different Implementations of MFCC[J].Journal of Computer Science & Technology,2001,16(6):582-589.
[6]胡磊.基于隱馬爾科夫模型的語音識別技術研究[D].武漢理工大學,2007.
[7]LD3320數據手冊[EB/OL].http://www.icroute.com/web_ cn/DownLoad.html,2010-9-11.
作者簡介:
羅貴舟(1990—),男,江蘇淮安人,長江大學電子信息學院碩士研究生,主要從事自動檢測與控制研究。
熊曉東(1964—),男,湖北荊門人,長江大學教授,主要從事油氣信號檢測方法與儀器研究、信號獲取與處理、自動檢測與控制、信號處理與傳輸研究。
Splicing screen synchronous driving display technology based on 8080 bus
Zhaoliang Dengwei
(Guanghan Sub College Civil Aviation Flight University of China,Guanghan,China)
This paper introduces the principle and implementation of splicing screen synchronous driving display technology based on 8080 bus.The method is based on the basic principle of standard 8080 bus protocol and splicing screen driving technology,by effciently using the 8080 bus interface and the physical connection of splicing screen display system,and detects,tracks,distinguishes the peripheral driving signal of splicing screen display system in real time,and switches the command and data fows in the system effciently,in order to accurately and synchronously display static images and video information.This method reduces the complex driving link of the traditional splicing screen display system,and greatly improves the driving effciency of the whole system.The method is simply and effciently.The application results in the splicing screen display system show that this method has a very good signal acquisition,data fow and synchronous display function.
8080 bus;splicing screen;data fow;synchronous display
趙亮(1982—),男,四川資陽人,碩士,工程師,現工作于中國民用航空飛行學院。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25