自供電式船舶軸系振動監測裝置設計
2017-03-08 05:45:59徐雨琴董良雄陳天然俞嘉陽
浙江海洋大學學報(自然科學版) 2017年6期
關鍵詞:振動
徐雨琴,董良雄,陳天然,俞嘉陽
(浙江海洋大學港航與交通運輸工程學院,浙江舟山 316022)
船舶推進軸系是船舶動力裝置系統中的重要部件,因發生故障所引發的事故后果相當嚴重,所以其可靠性和穩定性對于船舶安全具有重要意義。根據《海船系泊和航行試驗通則》,船舶投入營運前一般需要進行軸系扭振測試,此外在軸系的故障診斷中也常常需要進行軸系扭振測試[1]。為實現整個監測裝置長期有效的工作,首先需要解決的問題是為監測裝置提供足夠的、長期的能量,而現有的測試技術一般采用應變片測試應力信號,然后再用加速度傳感器、位移傳感器測試,將應力信號轉換為振動信號。并且利用電池提供電源,但這種裝置的持續運行時間和使用壽命較短,在軸系的故障監測報警中的運用會受到很大的限制。為了保證軸系扭振監測的連續性,就必須不斷地更新電池[2],但在實際操作中,這是非常困難的。目前,通過采收周圍環境中能量為傳感器供能已成為研究熱點,其中壓電式能量收集具有易于集成、結構簡單的優點,具有廣泛的應用前景。代顯智[3]通過采集環境的能量源,實現了傳感器的自供電并解決了無線傳感器攜帶電池能量有限的問題;文玉梅[4]針對能量采集器的輸出功率過低,根據根據調諧和阻抗變換原理對能量采集器進行了阻抗匹配,設計振動自供能無線傳感器的電源管理電路;陳韜[5]提出了在一些缺乏環境能源的條件下,單對多點激光主動供能方式為無線傳感器網絡供能;但這些研究只針對了如何為傳感器供能作為影響推進軸系的其中一個因素來簡單分析和考慮。根據該思路,本文提出了一種能收集船舶軸系扭振中的能量,并加以儲存,從而為監測裝置供能,又解決了推進軸系的振動持續監測問題的方案。
1 自供電的振動監測裝置設計原理
自供電軸系扭振監測系統包括三部分,它們分別是無線節點模塊、能量收集存儲模塊、壓電發電模塊。壓電發電模塊采用雙晶懸臂梁式壓電振子,壓電自發電的理論基礎是正壓電效應,利用壓電振子的變形來完成機械能往電能的轉換,從而實現發電的目的。能量存儲電路由能量收集器、電池充電器和鋰電池這三部分構成,其中的壓電發電裝置具有體積小、質量輕(大約150 g)、不會產生干擾等優良特性。其作用是將壓電振子產生強度較為衰弱的交流電信號轉換為無線節點模塊需要的強度較為平穩恒定的直流電;無線節點模塊由微處理器、無線收發器和傳感器這三部分構成,這三個模塊形成了一個完整的自供電無線傳感網絡節點設計方案,結構圖如圖1所示。
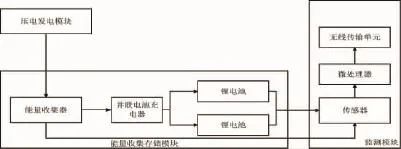
圖1 自供電的振動監測裝置結構圖Fig.1 The structure of Self-powered vibration monitoring device
2 壓電振子自發電結構
裝置采用的結構是雙晶懸臂梁式壓電振子[6],其外形如圖2所示,它由壓電層與中性層組成,發電能力強,結構簡單。中性層可采用可導電磷青銅薄板;壓電層采用PZT-5H壓電陶瓷,位于金屬薄板上下端面。通過導電膠使金屬薄板與壓電層進行粘接,其發電原理主要以第一類壓電方程為基礎,其邊界條件是電學短路、機械自由情況,如式(1)所示:

式中:εT為介電常數;E為電場;dt為d的轉置;SE為彈性柔順系數;S為應變;T為應力;d為壓電應變常數;D為電位移。
在外界激振力振動下,壓電層會發生變形,由于壓電效應,表面產生電荷;而當振動停止時,形狀恢復,此時電荷消失。當處于諧振狀態時,即外在激振頻率等于壓電振子的固有頻率時,壓電材料產生最大變形[7],發電效果最佳,輸出電壓或電荷量最大。。
壓電振子長50 mm,寬10 mm,厚1.3 mm。在簡諧正弦激振力的作用下,簡諧正弦激振力的幅值電壓Vp-p為0.3 V,不同激振頻率其輸出功率如圖3所示,顯而易見,壓電振子在激振頻率為54.05 Hz的作用下[8],輸出功率為945 μW,此時它的變形最大,發電能力最強。
3 能量收集存儲電路搭建
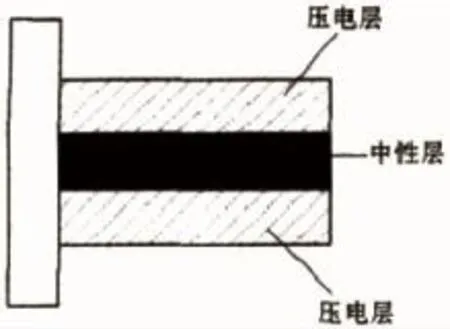
圖2 雙晶懸臂梁式壓電振子Fig.2 The double cantilever type of piezoelectric vibrator
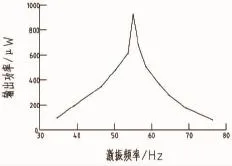
圖3 壓電振子輸出功率-激陣頻率關系圖Fig.3 The change of Piezoelectric oscillator output power with Burst frequency
電路的組成部分分別是2個LTC407電池充電器、1個LTC3588-1能量收集器、2個LIR7508 mAh鋰電池以及外部電路,如圖4所示。LTC3588-1內部集成了一個效率較高的降壓型轉換器和一個全波橋式、損耗較低的整流器,可在2.7~20 V的輸入電壓范圍內工作,該裝置選3.3 V作為工作電壓。LTC3588-1將壓電振子產生的交流電轉換成直流輸出,為無線節點模塊供電[9]。與此同時通過采用充電電路以及LTC4071芯片,將剩下的能量存儲在充電電池中,LTC4071能對鋰電池進行連續充電或者斷續充電,充電電流范圍為550 nA~50 m A。因為其工作電流較低,很合適給低容量的鋰離子電池收集能量[10]。該能量收集存儲模塊有充電和放電兩種工況,根據環境中采收能量與否,充電模式與放電模式可以交替運行。
(1)充電工況:能量收集裝置在軸系的連續振動下進入充電工況[11],壓電發電模塊通過壓電振子的彎曲變形,壓電發電模塊產生了微弱的交流電信號,該信號被送入能量收集存儲模塊[12],經過LTC3588-1的整流作用將信號存儲在電容C2上,同時將信號轉換成3.3 V標準電壓,然后將其輸出。與此同時,存儲在電容C2上的電能在通過LTC4071芯片的調理后,為鋰電池充電。
(2)放電工況:當壓電發電模塊沒有電荷輸出時,LTC3588-1的VIN端電壓會因而下降,此時充電電池開始釋放電荷至C2。將無線節點模塊中采集的數據送入無線節點模塊并發送給附件的接受裝置。
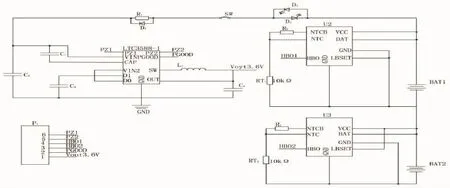
圖4 能量收集電路Fig.4 Energy harvesting circuit
4 無線節點模塊結構
為兼顧低功耗和可靠性,裝置選用基于CC2530芯片的ZigBee片上的系統,該芯片內含AD轉換模塊,壓電振子的系統通訊采用2.4 GHz的IEEE 802.15.4標準。由于采用了0.18 μm CMOS生產工藝,CC2530芯片在發射和接收模式下,電流損耗分別低于27 mA和25 mA,特別適合供電能力較弱的工況。為更大程度上節省能量,模塊分別采用監測模式和休眠模式兩種間歇工作方法:
(1)休眠模式:當軸系運轉平穩且扭振幅度較小時,軸系扭振處于安全工作范圍內,不需要持續監測。同時壓電振子產生電荷的能力較弱,因此可使無線節點模塊進入休眠模式。在該模式下自發電模塊繼續工作,并能在扭振幅度增強時迅速喚醒無線節點模塊,進入監測模式。
(2)監測模式:經過一定時間的集能量,無線節點模塊電量超過一定的值,或是軸系振動幅度增加到一定的值,都會喚醒無線節點模塊進入監測模式,軸系振動幅度增加,剛好滿足了電信號采集與發送的能量需求[13]。
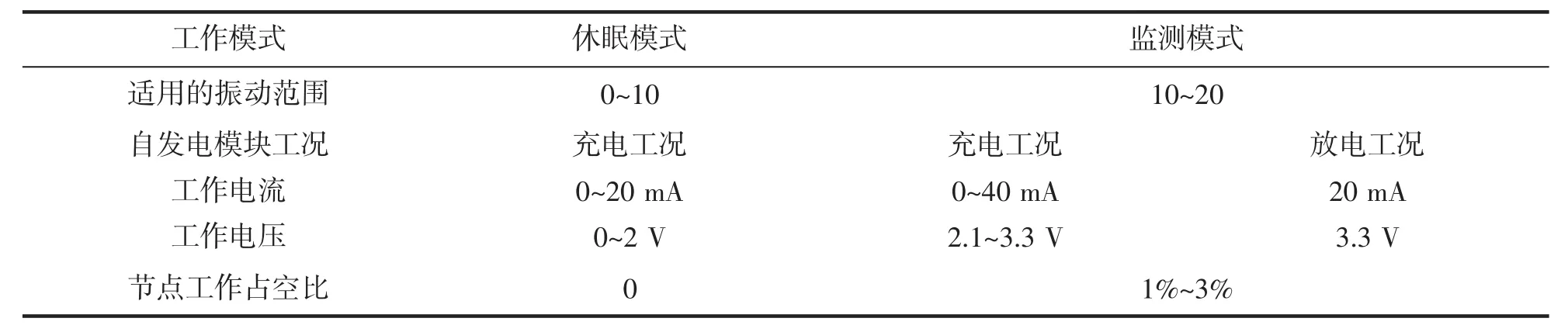
表1 無線節點模塊工作模式參數Tab.1 The parameters of Wireless node module operating mode
由表1中可知,處于監測模式時,只要激振頻率達到10以上,若需要節點工作時的占空比為1%,壓電發電模塊在節點休眠的時間內能夠積累約100 mA的電荷,這滿足節點一次工作要求,因為大于節點收發一次所需能量;從休眠模式轉換到工作模式的所需時間短,所需時間符合節點供電收集能量所需的時間[14]。與此同時,在大概100 h的時間內,兩塊容量為8 mAh的LIR750可充電鋰電池就能夠充滿電。
5 振動監測裝置性能測試
根據檢測要求,振動監測裝置的測量范圍可以進行推算,即根據軸系各部件承受的扭振力矩或扭應力推算頻譜數據及振幅。本文所取例船參數為:轉速129 r/min,功率7 860 kW,中間軸頸直徑300 mm,其許用值/瞬時許用值為65.42/111.21(N/mm2),軸系共振轉速59.0 r/min,軸系的常用工況頻率為8~17 Hz,進而按軸系自由振動的Holzer表可推算出許用振幅為0.53~1.376(deg)。
根據裝置的工作頻率,為了對其綜合性能進行分析,利用激振器給裝置提供各種頻率和幅值的工況,測量能量收集電路開路電壓與振動頻率,然后分析確定兩者之間的關系。測量結果如圖5所示。
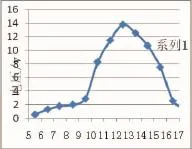
圖5 輸出電壓與激勵頻率之間的關系圖Fig.5 The change of the output voltage with excitation frequency
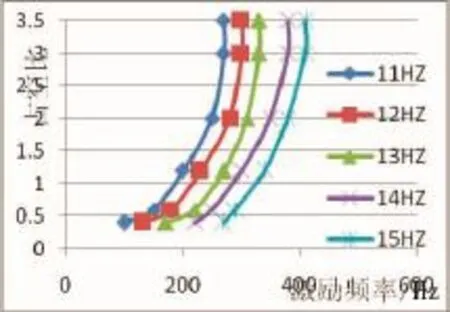
圖6 節點占空比與激勵振幅之間的關系圖Fig.6 The change of the Node duty cycle with Excitation amplitude
從圖5可以看出,能量收集器輸出的電壓最大時的外部激勵信號約為12 Hz。根據測算,在軸系的常用工況,在大約為50 h的時間內,兩塊LIR750容量為8 mAh的可充電鋰電池就可以充滿電。根據船舶軸系振動能量的供應特點,可將8 Hz,17 Hz作為系統工作的振動閾值[15],當裝置監測模塊判斷出船舶軸系扭振幅度小于或等于第一扭振閾值時,監測模塊進入休眠模式;當軸系扭振幅度大于或等于第二扭振閾值時,監測模塊進入監測模式。
進一步根據軸系的常用頻率11、12、13、14、15 Hz[16],選擇激振器不同的簡諧正弦信號幅值,進行無線模塊工作性能測試。測取節點工作的占空比與振動幅值之間的關系如圖6所示。從圖6可以看出,在0.53~1.8(deg)區域,工作的占空比為1%~3%,振動幅度越強則占空比越高,這樣基本滿足振動監測的周期間隔要求,因此裝置能夠對軸系運轉許用應力超過70%的工況進行及時報警。
6 結論
針對船舶推進軸系的監測需求,提出了一種自供電無線傳感網絡節點設計方案,并研制出了自供電的激振測試裝置。該裝置利用壓電自發電結構及能量收集存儲電路,收集軸系振動產生的能量,并加以儲存,從而為監測裝置供能,有效解決了目前船舶軸系扭振測試中的持續供電難題。同時自供電裝置性能穩定,體積小,發電量大,輸入與輸出信號的線性度良好。同軸系轉動,對軸系的參數幾乎沒有多大影響。該裝置既能對推進軸系振動進行監測,又可適用于各種復雜的振動環境。
[1]郝鴻雁,計青山.大型船舶推進軸系的扭振測量及其校核[J].浙江海洋學院學報:自然科學版,2013,32(4):344-347.
[2]SODANO H A,INMAN D J,PARK G.A review of power harvesting from vibration using piezoelectric materials[J].The Shock and Vibration Digest,2004,36(3):197-205.
[3]代顯智,張 章.用于自供能傳感器的環境能量源研究[J].電源技術,2012,36(3):440-443.
[4]文玉梅,葉建平,李 平,等.一種振動自供能無線傳感器的電源管理電路[J].電子技術應用,2011,37(11):84-87.
[5]陳 韜.無線傳感器網絡的激光主動供能能量采集系統研究[D].重慶:重慶大學,2012.
[6]茹 媛,邵 雪,趙 浩,等.壓電復合振子諧振頻率的磁調控研究[J].南京大學學報:自然科學,2015,51(6):1 126-1 131.
[7]EMICKA M,VASIC D,COSTA F,et al.Energy harvesting from vibration using a piezoelectric membrane[J].Journal De Physique IV,2005,128:187-193.
[8]KIM S,CLARK W W,WANG Q M.Piezoelectric energy harvesting using a diaphragm structure[J].Proceedings of SPLE,2003,5055(1):307-318.
[9]賈 濱.無線傳感器節點供電模塊的設計與實現[J].河北建筑工程學院學報,2014,32(1):121-123.
[10]YAN Shuai,SUN Weichao.Self-powered Suspension Criterion and Energy Regeneration Implementation Scheme of Motordriven Active Suspension[J].Mechanical Systems and Signal Processing,2017,94:297-311.
[11]MITCHESON P D,MIAO P,STARK B H,et al.MEMS electrostatic micropower generator for low frequency operation[J].Sensors and Actuators A:Physical,2004,115(2/3):523-529.
[12]張 敏,張鴻鑫,雷 林,等.懸臂梁式壓電能量收集裝置的實驗研究和有限元分析[J].重慶交通大學學報:自然科學版,2017,36(12):115-120.
[13]姜萬東,王 野,沈克明,等.一種新型自供電無線測溫傳感器控制系統[J].電氣技術,2017(6):77-80.
[14]潘家偉,黃衛清,周鳳拯,等.基于壓電效應的能量收集[J].壓電與聲光,2009,31(3):347-349.
[15]繆 赟,龔雅萍,馬瑤珠.提高軸系扭轉振動瞬時信號分析精度的轉速跟蹤分析方法的研究[J].浙江海洋學院學報:自然科學版,2001,20(3):221-225.
[16]文玉梅,吳翰鐘,李 平,等.一種采用頻率變換的自供電電源管理電路[J].電子學報,2012,40(11):2 324-2 329.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00