3-RCR并聯(lián)機(jī)構(gòu)結(jié)構(gòu)參數(shù)綜合優(yōu)化設(shè)計
2017-03-09 02:38:42陳海真李愛軍王紅梅毛立云
山東理工大學(xué)學(xué)報(自然科學(xué)版) 2017年2期
關(guān)鍵詞:優(yōu)化
陳海真,魏 崢,李愛軍,王紅梅,毛立云
(1.山東理工大學(xué) 機(jī)械工程學(xué)院,山東 淄博 255049;2.山東省水利技師學(xué)院 基礎(chǔ)部,山東 淄博 255130)
3-RCR并聯(lián)機(jī)構(gòu)結(jié)構(gòu)參數(shù)綜合優(yōu)化設(shè)計
陳海真1,魏 崢1,李愛軍1,王紅梅1,毛立云2
(1.山東理工大學(xué) 機(jī)械工程學(xué)院,山東 淄博 255049;2.山東省水利技師學(xué)院 基礎(chǔ)部,山東 淄博 255130)
少自由度并聯(lián)機(jī)構(gòu)優(yōu)化設(shè)計的理論研究雖然取得了一定的成果,但其推廣應(yīng)用仍受到限制.對3-RCR并聯(lián)機(jī)構(gòu)位置進(jìn)行了求解,得到了其雅可比矩陣,并獲得了機(jī)構(gòu)工作空間的體積和全域條件數(shù);以此為基礎(chǔ)對機(jī)構(gòu)進(jìn)行了參數(shù)綜合優(yōu)化,以工作空間的體積最大和靈巧度最高為目標(biāo),建立了優(yōu)化設(shè)計數(shù)學(xué)模型,并用MATLAB遺傳算法優(yōu)化工具箱求解,得到了滿足目標(biāo)要求的結(jié)果,為機(jī)構(gòu)的推廣應(yīng)用提供了理論基礎(chǔ).
三平移并聯(lián)機(jī)構(gòu);靈巧度;工作空間;工程遺傳算法;結(jié)構(gòu)參數(shù)優(yōu)化
目前,對少自由度并聯(lián)機(jī)器人機(jī)構(gòu)優(yōu)化設(shè)計的理論研究取得了一定的成果,但以增大工作空間或者是單純提高靈巧度為單目標(biāo)進(jìn)行優(yōu)化的居多,以多目標(biāo)進(jìn)行優(yōu)化設(shè)計的還較少,因此并聯(lián)機(jī)器人機(jī)構(gòu)不能得到很好的推廣應(yīng)用. 并聯(lián)機(jī)構(gòu)優(yōu)化設(shè)計數(shù)學(xué)模型特點(diǎn)之一是多維非線性,因此如何采用一種有效的算法進(jìn)行全局并行搜索,實(shí)現(xiàn)多個目標(biāo)綜合考慮來尋求結(jié)構(gòu)參數(shù)的最優(yōu)值是人們一直致力研究的目標(biāo).本文基于3-RCR并聯(lián)機(jī)構(gòu)的工作空間體積和全域條件數(shù),以工作空間和靈巧度[1-2]為目標(biāo),利用工程遺傳算法求解,對其結(jié)構(gòu)參數(shù)進(jìn)行綜合優(yōu)化設(shè)計.
1 機(jī)構(gòu)描述
圖1所示為3-RCR并聯(lián)機(jī)構(gòu)的結(jié)構(gòu)簡圖,此并聯(lián)機(jī)構(gòu)由動平臺、靜平臺、3個結(jié)構(gòu)相同的支鏈(RCR)組成.動平臺和靜平臺都是正三角形而且相互平行,3條支鏈將動靜平臺相連,3條支鏈所在的平面都與上下動、靜平臺垂直,并且同時與三角形平臺相應(yīng)的邊垂直,每條支鏈中的C副和兩個R副軸線都與三角形平臺的相應(yīng)邊平行,3條支鏈呈120°度對稱布置.

圖1 并聯(lián)機(jī)構(gòu)結(jié)構(gòu)簡圖
2 機(jī)構(gòu)的位置解及雅可比矩陣
2.1 位置正反解
建立如圖1所示坐標(biāo)系A(chǔ)1-XYZ,X軸與EF重合,Y軸與EF垂直,據(jù)右手法則確定Z軸的方向垂直向上.機(jī)構(gòu)的相關(guān)參數(shù)如下:靜、動平臺都是等邊三角形,邊長分別是a、b;連桿AiBi(i=1,2,3)的長度是l1,并且與豎直方向的夾角分別為i(i=1,2,3);連桿BiCi(i=1,2,3)的長度是l2,且與水平方向的夾角各為βi(i=1,2,3);支鏈AiBiCi(i=1,2,3)中圓柱副中心的位移分別是di(i=1,2,3).
2.1.1 位置反解
機(jī)構(gòu)的位置反解,即已知動平臺上點(diǎn)D的輸出參數(shù)(XD,YD,ZD),求解支鏈的輸入?yún)?shù)αi(i=1,2,3)[3].動平臺作三維平移,其上各點(diǎn)具有相同運(yùn)動情況,因此可以從動平臺上任選一點(diǎn)對其運(yùn)動進(jìn)行分析,本文選動平臺幾何中心點(diǎn)D進(jìn)行分析. 通過每條支鏈末端的轉(zhuǎn)動副將運(yùn)動輸入i(i=1,2,3)最終傳遞給動平臺,位置反解可以根據(jù)D點(diǎn)與各轉(zhuǎn)動副中心點(diǎn)Ci(i=1,2,3)的空間位置關(guān)系來建立.
在坐標(biāo)系A(chǔ)1-XYZ中,設(shè)點(diǎn)Ci(i=1,2,3)、D的空間坐標(biāo)依次是: (Xci,Yci,Zci) (i=1,2,3) 、(XD,YD,ZD),各坐標(biāo)之間有如下關(guān)系:
(1)
在坐標(biāo)系A(chǔ)1-XYZ中,點(diǎn)Ci(i=1,2,3)的坐標(biāo)分別為
(2)
(3)
(4)
由式(1)、式(2)可得
(5)
將式(5)中的后兩式取平方和消去中間變量β1,得
(6)

同理,由式(1)、式(3)可分別求得
(7)
(8)
式中:
2.1.2 位置正解
由式(5)后兩式可得
(9)
同理,由式(1)、式(3)和式(4)、可分別求得
(10)
(11)
用Newton-Raphson方法可以對以上三元二次方程組進(jìn)行求解.
2.2 機(jī)構(gòu)的雅可比矩陣
式(9)~式(11)為3-RCR并聯(lián)機(jī)構(gòu)輸入和輸出之間的函數(shù)關(guān)系式,要求解主動關(guān)節(jié)輸入速度與動平臺輸出速度的關(guān)系,可以將式兩端分別對時間求導(dǎo)[4-5],即
(12)
式中,J-1為速度雅克比矩陣的逆矩陣,且
J-1=
(13)
如果det(J-1)≠0,則
(14)
式中,J為機(jī)構(gòu)速度雅克比矩陣[4-5].
3 機(jī)構(gòu)工作空間的體積和全域條件數(shù)
3.1 工作空間的體積
圖2為工作空間截面示意圖.對工作空間進(jìn)行邊界搜索[6],然后用與平面XY平行的平面將工作空間分割成若干個微分子空間,微分子空間的厚度為ΔZ.如果ΔZ足夠小,這些微分子空間可以近似被看作是高度為ΔZ的柱體,機(jī)構(gòu)工作空間的體積近似等于這些子空間體積的累加.
根據(jù)機(jī)構(gòu)的位置反解不難看出機(jī)構(gòu)的工作空間截面是單域的,因此機(jī)構(gòu)工作空間的體積可表示為[3]

(15)

圖2 工作空間截面示意圖
工作空間搜索程序根據(jù)機(jī)構(gòu)的位置反解編寫,并結(jié)合式(15)可計算出工作空間的體積.
3.2 機(jī)構(gòu)的全域條件數(shù)
用局部條件數(shù)衡量機(jī)構(gòu)在某一位置的運(yùn)動靈巧度,其定義為
(16)
式中:J是機(jī)構(gòu)的雅可比矩陣;C為條件數(shù),其范圍為1≤C≤.當(dāng)條件數(shù)C的值接近1,雅可比矩陣J是良態(tài)矩陣;當(dāng)條件數(shù)C=1,機(jī)構(gòu)的運(yùn)動傳遞性能最佳,機(jī)構(gòu)的這一形位被稱為運(yùn)動學(xué)各向同性;如果條件數(shù)C無窮大,機(jī)構(gòu)的雅可比矩陣J為病態(tài),機(jī)構(gòu)處于特殊形位.
機(jī)構(gòu)在給定工作空間內(nèi)的總體運(yùn)動性能用全域條件數(shù)來表示[4],全域條件數(shù)可作為衡量機(jī)構(gòu)運(yùn)動性能指標(biāo)的工具,若G為全域條件數(shù),則
(17)
式中,W為機(jī)構(gòu)的工作空間容積.將條件數(shù)C代入式,可得出G的值域.當(dāng)全域條件數(shù)G接近于0,表明有壞的全域條件數(shù),機(jī)構(gòu)的運(yùn)動性能較差;反之,全域條件數(shù)G接近于1,表明有好的全域條件數(shù),機(jī)構(gòu)運(yùn)動性能較好,而且G越接近于1,機(jī)構(gòu)在給定空間內(nèi)的總體運(yùn)動性能越好.但是因?yàn)橐话爿^難得到全域條件數(shù)G的解析解,或者有解析解但其表達(dá)式也十分復(fù)雜,所以全域條件數(shù)G一般用離散型表示,即
(18)
式中:∑(1/C)為工作空間網(wǎng)格內(nèi)的每一個條件數(shù)倒數(shù)的累加;w為落在工作空間網(wǎng)格內(nèi)點(diǎn)的數(shù)量.對于非離散型和離散型全域條件數(shù)的值域意義相同.w與機(jī)構(gòu)的工作空間容積W相對應(yīng),分子與滿足工作空間約束條件的點(diǎn)的條件數(shù)倒數(shù)的積分相對應(yīng),用極坐標(biāo)搜索算法來求取工作空間G的值時,式(18)可以作為機(jī)構(gòu)優(yōu)化的目標(biāo)函數(shù).
4 機(jī)構(gòu)結(jié)構(gòu)參數(shù)綜合優(yōu)化
為使并聯(lián)機(jī)構(gòu)有更大的工作空間和更好的靈巧性,必須對其進(jìn)行結(jié)構(gòu)參數(shù)綜合優(yōu)化[7-8].優(yōu)化方法采用多目標(biāo)優(yōu)化方法中的主目標(biāo)函數(shù)法,以靈巧度為主目標(biāo)函數(shù),將子目標(biāo)工作空間轉(zhuǎn)化為新的約束條件,并將工作空間子目標(biāo)限制在一定的范圍內(nèi).運(yùn)用遺傳算法進(jìn)行求解.設(shè)G為主要目標(biāo)函數(shù),則待優(yōu)化的函數(shù)可以表示為
(19)
為了計算簡單,對結(jié)構(gòu)參數(shù)變量進(jìn)行處理,給出尺寸約束范圍為
由前面工作空間優(yōu)化分析對工作空間體積約束可確定為:11≤V≤14.靈巧度函數(shù)用MAT LAB中的M文件編寫,利用MATLAB遺傳工具箱求機(jī)構(gòu)的最優(yōu)解[9].
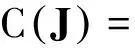
此并聯(lián)機(jī)構(gòu)結(jié)構(gòu)參數(shù)優(yōu)化前后在同一工作空間截面上的靈巧度圖譜如圖3、圖4所示;優(yōu)化前后機(jī)構(gòu)的工作空間三維圖如圖5、圖6所示.

圖3 優(yōu)化前截面Z=300mm上的靈巧度

圖4 優(yōu)化后截面Z=300mm上的靈巧度
圖5 優(yōu)化前機(jī)構(gòu)的工作空間三維圖
由圖3和圖4看出,由于各截面所處的位置不同,各個截面上的靈巧度在優(yōu)化前后有所變化,優(yōu)化后截面邊界處的靈巧度有所提高,中心處的靈巧度與邊界處的靈巧度差值變小了,即優(yōu)化后機(jī)構(gòu)截面各處的運(yùn)動性能波動變小了,機(jī)構(gòu)有更加平穩(wěn)的運(yùn)動性能.由圖5和圖6看出,與優(yōu)化前相比,多目標(biāo)綜合優(yōu)化后的工作空間更加飽滿.

圖6 優(yōu)化后機(jī)構(gòu)的工作空間三維圖
機(jī)構(gòu)在給定工作空間內(nèi)的靈巧度用全域條件數(shù)來表示,表1給出一組結(jié)構(gòu)參數(shù)優(yōu)化前后工作空間體積和全域條件數(shù)的值,由表1可進(jìn)一步看出優(yōu)化后機(jī)構(gòu)工作空間和靈巧度的變化. 多目標(biāo)優(yōu)化后工作空間的體積相對增大了34.97%,全域條件數(shù)的值相對提高了7.4%,說明優(yōu)化后此并聯(lián)機(jī)構(gòu)的總運(yùn)動性能有所提高.
表 1 參數(shù)、工作空間體積和全域條件數(shù)初值及優(yōu)化值

參數(shù)值參數(shù)/mmabl1l2工作空間體積/mm3全域條件數(shù)G優(yōu)化前6003002002009.44×1060.2404優(yōu)化后649.931290.960202.231241.011.274×1070.2582
5 結(jié)束語
采用主目標(biāo)函數(shù)法對3-RCR并聯(lián)機(jī)構(gòu)結(jié)構(gòu)參數(shù)進(jìn)行了多目標(biāo)綜合優(yōu)化,以工作空間和靈巧度為優(yōu)化目標(biāo),運(yùn)用MATLAB遺傳工具箱計算得到了最優(yōu)方案.用極坐標(biāo)搜索法繪制出機(jī)構(gòu)優(yōu)化前后在某截面上的靈巧度圖,通過與單目標(biāo)優(yōu)化靈巧度圖對比可知,機(jī)構(gòu)參數(shù)進(jìn)行多目標(biāo)綜合優(yōu)化后,其運(yùn)動平穩(wěn)性有所提高;優(yōu)化后機(jī)構(gòu)的工作空間變得更飽滿,機(jī)構(gòu)的綜合性能顯著提高.
[1] 高洪,蔣璇,肖平,等. 6-3-3并聯(lián)機(jī)構(gòu)尺度的優(yōu)化綜合[J].機(jī)械設(shè)計,2012,29(8):57-60.
[2] YU Y,LIANG W Y. Design optimization for parallel mechanism using on human hip joint power assisting based on manipulability inclusive principle [C] //2012 IEEE International Conference on Robotics and Automation, 2012:2 306-2 312.
[3] 黃真.空間機(jī)構(gòu)學(xué)[M].北京:機(jī)械工業(yè)出版社,1991.
[4] 劉大煒,王立平. 基于工作空間的4RRR冗余并聯(lián)機(jī)構(gòu)支鏈優(yōu)化[J].清華大學(xué)學(xué)報(自然科學(xué)版),2010,50(8):1 239-1 242.
[5] 楊明星,郭宗和,王德軍, 等.一種新型4自由度并聯(lián)機(jī)構(gòu)的參數(shù)優(yōu)化及其應(yīng)用研究[J].機(jī)床與液壓,2014,42 (15 ):15-18.
[6] 賈曉輝,劉今越 . 3-PRR柔性并聯(lián)機(jī)構(gòu)的優(yōu)化設(shè)計機(jī)械設(shè)計[J].2014,31(1):26-29.
[7] 王庚祥 ,劉宏昭,原大寧. 一種新型3-SPS/CR并聯(lián)機(jī)構(gòu)及其優(yōu)化設(shè)計[J]. 機(jī)械科學(xué)與技術(shù),2012,31(7):1 094-1 099.
[8] KONG M X, CHEN L, DU Z J,et al . Multi-objective optimization on dynamic performance for a planar parallel mechanism with NSGA-II algorithm[J]. Jiqiren/Robot,2010,32(2):271-277.
[9] STORMY A. MATLAB編程與工程應(yīng)用[M]. 魚濱, 等, 譯. 北京: 電子工業(yè)出版社, 2013.
(編輯:郝秀清)
Structural parameters multi-objective optimization design of 3-RCR parallel mechanism
CHEN Hai-zhen,WEI Zheng, LI Ai-jun, WANG Hong-mei, MAO Li-yun
(1.School of Mechanical Engineering, Shandong University of Technology, Zibo 255049, China;2. Basic Department, Normal School of Water Conservation Technology of Shandong University, Zibo 255130, China)
Some achievements have been obtained for structural parameter optimization design theoretical research of the less freedom parallel mechanism, but its spread application is still restricted. In this research, the 3-RCR position solutions are obtained, then Jacobin matrix of the structural is received. The workspace volume and global condition index are calculated through position analysis and solution of the Jacobin matrix.On this basis, structural parameters multi-objective optimization design are executed and the optimization mathematical model is established in order to get the largest workspace volume and the highest degree of dexterity.The mathematical model is solved by using the genetic algorithm toolbox of MATLAB.It provides the theoretical basis for the popularization and application of the mechanism.
three translation parallel mechanism;dexterity;workspace;engineering genetic algorithm; optimization of structural parameters
2016-05-11
陳海真,女,chhaizhen@163.com
1672-6197(2017)02-0035-05
TH
A
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
