基于衍射光柵的干涉式精密位移測量系統
2017-03-11 03:17:40李文昊巴音賀希格劉兆武
中國光學 2017年1期
呂 強,李文昊,巴音賀希格,柏 楊,劉兆武,王 瑋
(1.中國科學院長春光學精密機械與物理研究所,吉林長春130033;2.中國科學院大學,北京101408;3.吉林大學生物與農業工程學院,吉林長春130022)
基于衍射光柵的干涉式精密位移測量系統
呂 強1,2,李文昊1*,巴音賀希格1,柏 楊3,劉兆武1,2,王 瑋1,2
(1.中國科學院長春光學精密機械與物理研究所,吉林長春130033;
2.中國科學院大學,北京101408;
3.吉林大學生物與農業工程學院,吉林長春130022)
介紹了基于幾何莫爾條紋原理和衍射干涉原理的兩種光柵精密位移測量系統及各自的特點。綜述了國內外對光柵干涉式精密位移測量系統的研究進展,總結了系統存在的關鍵問題及發展趨勢。光柵干涉式精密位移測量系統的優點是對環境要求小,測量分辨率和精度較高,結構緊湊,成本低。該系統需要解決的問題包括提高光柵以及光學元器件制造和安裝精度;尋求一種更高精度的檢測手段對光柵位移測量系統進行標定等。光柵干涉式精密位移測量系統的發展方向為更高測量分辨率和精度,大量程、多維度測量以及尺寸小巧。該系統在現代工業加工精密制造領域將具有更廣闊的應用前景。
位移測量;光柵;衍射干涉;高精度
1 引 言
21世紀以來,隨著美國“先進制造伙伴計劃”,德國“工業4.0”等創新戰略計劃的提出,世界主要國家都在依靠創新增強經濟發展內生動力,搶占制造業高端,以智能制造為主導的第四次工業革命拉開了序幕。中國為了實現由制造大國向制造強國的轉變,提出實施“中國制造2025”的戰略。而更高水平的測量技術是“中國制造2025”的基石,是我國實現向制造強國轉變的重要前提之一。計量與測試技術革命將對各個領域的測量精度產生深遠影響。半導體制造、超精密光學加工、生物分子操縱以及納米尺度診斷等領域[1-2]都需要高精度的掃描位移平臺,尋找一種能夠在宏觀尺度范圍內實現更高精度測量的方法顯得尤為重要。
近年來人們對納米位移測量技術的研究越來越多,各種精密位移測量儀器及測量方法層出不窮。STM、電容、電感測微儀、X射線干涉儀、光纖位移傳感器、激光干涉儀以及光柵位移測量系統等[3-6]測量手段被廣泛應用于各個領域的生產制造。其中,激光干涉儀和光柵位移測量系統是能夠同時滿足大量程和高分辨率的位移測量手段。
激光干涉儀以其特有的大量程、高分辨率和高精度等優點,在精密和超精密位移測量領域獲得了廣泛的應用[7]。激光干涉儀是以穩頻激光的波長為工作基準,當測量環境的某些參數如溫度、壓力、相對濕度、CO2濃度等發生變化等都會導致波長的不穩定,加之外界振動和電子學噪聲,這些都會給測量帶來誤差。因此,外界環境對激光干涉儀影響很大。用激光干涉儀實現高精度測量需要高級別的環境控制系統,比如米級尺度納米級測量精度對環境的溫度變化要求為0.01℃,這無疑加大了技術和成本上的投入。激光干涉儀的這一缺點限制了其應用范圍,一般的生產制造環境很難使激光干涉儀實現高精度測量。所以,一種對環境要求小的測量方法對工業制造有十分重要的意義。
光柵位移測量系統很好的解決了環境對測量精度影響大的問題。該系統的核心元件是光柵,以光柵柵距為測量基準,系統結構緊湊,光路對稱且光程短,外界環境對其影響微乎其微[8-9]。尤其是利用光的衍射干涉原理的光柵干涉式精密位移測量系統,相對于基于幾何莫爾條紋原理的光柵位移測量系統,其分辨率和精度更高,結構更加靈活,更加適合高精度的加工制造領域中的位移測量和定位。
2 基本原理
光柵位移測量系統以光柵柵距為測量基準,當光柵柵距在10μm至200μm范圍內,柵距遠大于光源的波長,光入射到光柵上,衍射現象可以忽略。兩塊光柵—參考光柵和測量光柵相對移動會產生低頻拍現象形成莫爾條紋[10-11],通過對莫爾條紋的計數和細分,可以計算出兩塊光柵的相對位移大小,實現位移測量。其原理圖如圖1所示。光源S發出的光經透鏡L準直后入射到參考光柵G1,經過參考光柵G1和測量光柵G2后形成莫爾條紋,并且被光敏元件D接收,送到后續電路系統E處理。這一類測量系統為基于幾何莫爾條紋原理的光柵位移測量系統。系統中的測量光柵通常位于參考光柵的第一菲涅爾焦面上,兩個光柵之間的距離為l=d2/λ,d為光柵柵距,λ為入射波波長。兩光柵之間的距離會隨光柵間距的減小而減小,公差要求也會變嚴格。較高的公差要求,對制造安裝無疑是不利的[12]。另外,隨著光柵柵距的減小,光的衍射現象便不可忽略,衍射光會作為干擾光降低系統的信噪比。基于幾何莫爾條紋原理的光柵位移測量系統的這一缺點限制了其精度和分辨率的提高,一般該系統通過后期高倍的電子細分來提高分辨率,但細分誤差影響著系統的精度。因此,基于幾何莫爾條紋原理的光柵位移測量系統很難應用在有著更高精度需求的加工制造領域。
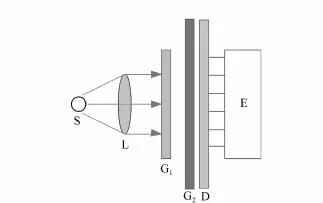
圖1 基于幾何莫爾條紋原理的光柵位移測量系統結構簡圖Fig.1 Schematic diagram of the grating displacement measurement system based on the principle of geometric Moire fringe
當光柵的柵距小于10μm時,柵距和光源波長比較接近,衍射現象越來越明顯。衍射光柵干涉式位移測量系統就是利用衍射光的干涉產生明暗變化的條紋進行位移測量。其原理圖如圖2(a)和2(b)所示。
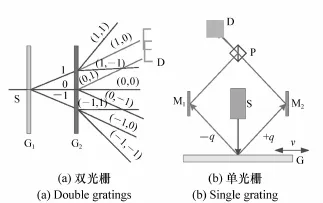
圖2 基于衍射干涉原理的光柵位移測量系統結構簡圖Fig.2 Schematic diagram of the grating displacement measurement system based on the principle of diffraction and interference
圖2 (a)中的系統采用兩塊光柵,光源發出的光線通過第一塊光柵G1衍射分光,入射到第二塊光柵G2,經過第二塊光柵的衍射后,取相同方向的衍射光進行干涉,形成干涉條紋[13]。兩塊光柵相對運動使得條紋也發生明暗變化,實現位移測量。
圖2(b)中的系統采用一塊光柵,激光器發出的光經光柵衍射,取其對稱級次±q級的衍射光進行干涉,用探測器接收干涉條紋。根據多普勒效應[14-15],光柵移動了距離s,±q級衍射光之間會有Δω=4πqv/d的角頻率差,兩束光差頻干涉后會得到光強I隨光柵位移s之間的關系:I~cos(4πqs/d)。如此便將位移s轉化成了電信號。當衍射光取±1級時,系統具有光學二倍頻。
由于光柵柵距是決定系統分辨率的重要因素,所以衍射光柵干涉式位移測量系統具有更高的分辨率,而且由于衍射光作為測量信號而不是干擾項,所以提高了系統的信噪比。衍射光柵干涉式位移測量系統結構靈活多變,國內外對其研究頗多。主要的研究和設計趨勢包括縮小系統的體積,提高系統掃描速度、精度、分辨率以及穩定性,擴大系統的量程以及實現多維度測量等。
3 國內外研究進展
目前德國、日本等國在光柵位移測量領域有很大優勢,德國Heidenhain公司光柵位移測量系統的設計理念,產品種類和產量都居于領先地位。
Heidenhain公司[16-18]的LIP、LIF、PP等系列產品是衍射光柵干涉式位移測量系統。該類產品一般采用柵距為8μm和4μm的光柵。圖3為該系統的原理圖。
如圖3所示,參考光柵G1為透射光柵,測量光柵G2為反射光柵。LED光源S發射的光經透鏡L準直后照射到參考光柵上并衍射為強度大致相等的0級和±1級衍射光。由于測量光柵被設計成沒有零級衍射光出現,所以這3部分衍射光各自被測量光柵衍射為±1級衍射光。±1級衍射光又一次經過參考光柵衍射后發生干涉,形成了3路有一定相位差的干涉信號,分別被3個光電池D接收。系統采用了反射式測量光柵,光源和探測器在光柵的同側,使得系統結構更加緊湊,便于安裝。
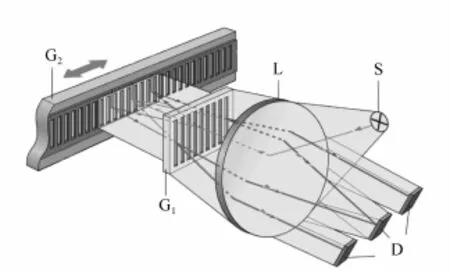
圖3 Heidenhain公司衍射光柵干涉式位移測量系統原理圖Fig.3 Schematic diagram of the diffraction grating interferometer displacement measurement system in Heidenhain
為了分析方便,可以將系統中的反射光柵等效成透射光柵構成三光柵系統[8,19]。如圖4所示,G1和G3為參考光柵,G2為測量光柵。G1和G2之間的距離等于G2和G3之間的距離。光源發出的光經準直之后照射到G1,被G1衍射為0級和±1級。由于G1光柵的特殊設計,0級衍射光相對于±1級衍射光有φ的相位延遲。這三級衍射光照射到G2上并被其衍射。G2光柵能夠抑制0級衍射光的產生,所以只有±1級衍射光會照射到G3光柵上,經過G3光柵的衍射后,相同方向的衍射光相互干涉形成干涉條紋。當G2光柵相對于G1(G3)光柵運動時,被G2衍射的+1級衍射光有+Ω的相位變化,-1級衍射光有-Ω的相位變化,由于G3就是G1光柵,所以0級衍射光還有φ的相位延遲。最終各個干涉波的相位來自于各單束光相移之和。3路信號光強和相位之間的關系為:I1~2[1+cos(2Ω+2φ)];I2~2(1+cos2Ω);I-1~2[1+cos(2Ω-2φ)]。3路有一定相位差的干涉信號被相應的光電池接收,并轉換成電信號進行后續處理。
Heidenhain公司LIP571就采用這種結構,其標尺光柵柵距為8μm,經過光學二倍頻,便可得到分辨率為4μm的原始信號,再通過電子學細分,系統的最終分辨率為50 nm。并且兩光柵之間的距離為0.5 mm,平行度為±0.06 mm。該公司在20世紀80年代后期推出的LID351,采用幾何莫爾條紋原理,光柵柵距為10μm(分辨率可達50 nm),它的間隙要求已經達到(0.1± 0.015)mm。相比之下,LIP571比它的公差要求寬松許多。LIP471采用柵距為4μm的標尺光柵,系統最終分辨率可達5 nm,精度等級達到±1μm,非常適合高精度的位移測量。
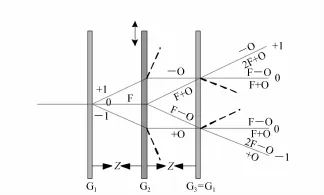
圖4 三光柵系統原理圖Fig.4 Schematic diagram of three-grating system
另外,為了進一步提高精度和分辨率,Heidenhain公司的LIP372和LIP382產品采用了柵距為0.512μm的標尺光柵,并且在結構上進行了調整[20]。圖5為LIP382的系統原理圖。
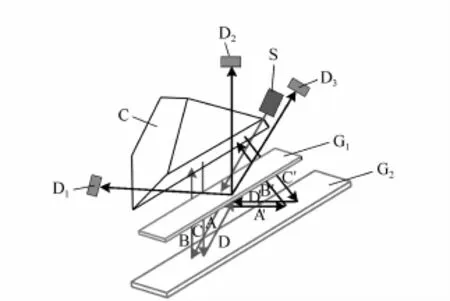
圖5 LIP382系統原理圖Fig.5 Schematic diagram of LIP382
如圖5所示,光源S發出的光經過參考光柵G1衍射為0級和±1級,通過一定的結構抑制0級光,只讓±1級光A和A′照射到標尺光柵,并且經標尺光柵衍射為1級衍射光B和B′。系統引入了一個角錐棱鏡,而且角錐棱鏡和標尺光柵以及A、A′衍射光采用Littrow自準直安裝。通過這種結構設計,產生了分別與B、B′平行而且有一定平移的反射光C、C′并再次入射到標尺光柵。1級衍射光D、D′經參考光柵衍射為3路并相同方向的光發生干涉,3個探測器分別接收這3個干涉信號,進行后續處理。
該系統的最大特點就是加入了角錐棱鏡,其優點主要有兩個:第一,使經過標尺光柵的衍射光再次入射到標尺光柵,發生了二次衍射,形成了光學四倍頻,分辨率得到了提升;第二,帶來了較為寬松的安裝公差。LIP382的分辨率達到1 nm,精度等級為±0.5μm,量程為70~270 mm,適合更高精度位移測量。另外,日本SONY公司研制的BS78系列激光尺[21]采用柵距為0.55μm的全息光柵,系統得到的全息光柵信號周期是0.137 9μm。值得一提的是,它通過4 000倍的電子細分后得到34 pm的最小步距。精度在±0.04μm以下,測量長度為10~420 mm。該測量系統達到皮米級分辨率,是21世紀精密檢測的一個重大飛躍。
R.Sawada等人[22-25]對單光柵系統進行了相關研究,利用平板印刷術和特殊的半導體制造技術將激光二極管、聚酰亞胺波導以及一些光學薄膜集成在一起。如圖6所示,激光二極管S發出的光經過透鏡L1、L2后照射到光柵G上,相應的衍射光再通過透鏡L3被光電二極管D接收。整個系統結構簡單,而且尺寸縮小到了500μm2,微小化的光柵位移測量系統慣性小,具有很高的掃描速度,系統分辨率小于10 nm,可以將其應用在微型機器人手臂等微位移測量中。
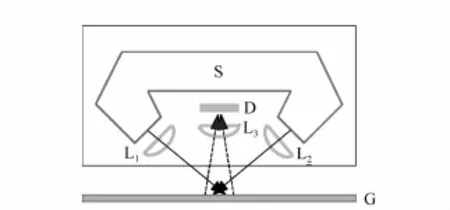
圖6 微型光柵位移測量系統原理圖Fig.6 Schematic diagram of m icro diffraction grating interferometer displacement measurement system
日本尼康公司[26-30]在半導體光刻機掃描平臺上將激光干涉儀和光柵位移測量系統相結合構成BEC(Bird′s Eye Control)系統,如圖7所示。由于讀數頭和光柵之間只有2 mm的距離,所以相對于激光干涉儀來說,環境對光柵位移測系統影響很小。光柵位移測量系統擁有很好的重復性,而激光干涉儀擁有高精度和長行程穩定性。二者的結合,提高了位移精度和穩定性,有利于提高硅片的產量和質量。另外,在光柵位移測量系統中該公司采用多讀數頭切換的方案擴大了光柵位移測量系統的量程。這種方法能夠有效的解決采用高刻線密度光柵時量程很難擴大的問題。
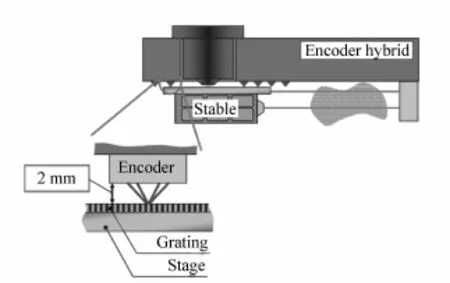
圖7 Bird′s Eye Control系統原理圖Fig.7 Schematic diagram of Bird′s Eye Control system
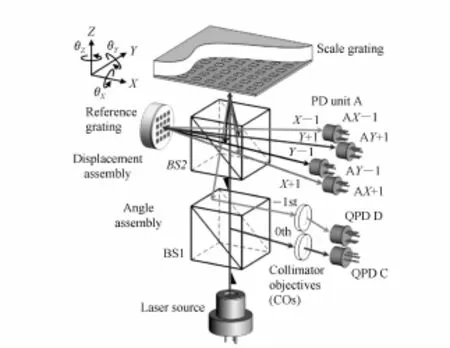
圖8 6自由度測量系統原理圖Fig.8 Conceptual design of the six-DOF surface encoder combined with a three-DOF displacement assembly and a three-DOF angle assembly
日本東北大學高偉等人[31-36]對半導體制造中所使用的二維運動平臺進行了研究,并設計了能夠實現三維位移測量以及三維角度測量的系統。其系統原理圖如圖8所示。XY方向位移測量采用衍射光柵干涉式系統單光柵測量原理,Z方向位移測量采用邁克爾遜干涉儀原理。值得一提的是系統把由測量光柵衍射得到的0級和-1級衍射光引入到2個四象限光電二極管QPD實現三維的角度測量。該系統采用的參考光柵和測量光柵的柵距都為0.57μm,測量光柵的大小為60 mm×60 mm,整個讀數頭的尺寸為95 mm× 90 mm×25 mm。該系統可以實現2 nm位移測量分辨率以及0.1和0.3角秒的角度測量分辨率。由于該系統采用了許多光學元件,系統的穩定性是個需要解決的重要問題。另外,該系統在θz方向上的角度分辨率以及X、Y、Z三個方向尤其是Z方向位移測量量程有待提高。
國防科技大學[37-42]對Post提出的非對稱雙級衍射系統[43]進行了研究,并將其中的參考光柵用分光鏡代替,將光源L出射的光分成P、Q兩束,經過平面鏡反射之后對稱入射到光柵上。選取高級次衍射光干涉實現了高倍的光學細分,配合相應細分電路實現1 nm分辨率。所采用的光路圖如圖9所示。該系統光學元件使用相對較少,在一定程度上減少了元件偏擺誤差對系統精度的影響。另外,他們還采用了兩種電子細分方法:采用任意相位差條紋信號細分方法的系統在100 mm測量范圍內有100 nm的精度,并且有500 mm/s的測量速度。采用傅立葉變換條紋細分法的系統雖然測量速度相對較低,但是系統條紋信號噪聲大大降低,測量精度達到10 nm。
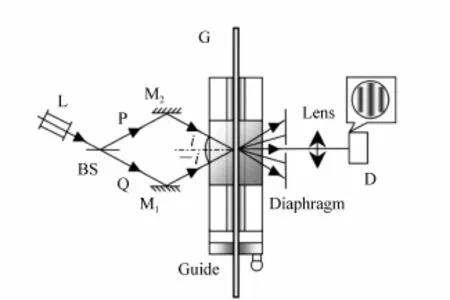
圖9 光柵干涉位移測量系統光路圖Fig.9 Schematic diagram of optical setup
臺灣地區一些高校及科研機構對光柵位移測量系統進行了多方面的研究,提出了許多新方案。2006年,范光照等人[44-45]采用1 200 l/mm的高刻線密度全息光柵,并設計了二次衍射的對稱光路結構,提高了系統的分辨率,如圖10所示。該系統在15 mm測量范圍內與雙頻激光干涉儀之間的標準差為10~19 nm。他還采用Littrow結構提高了系統讀數頭和光柵的對準公差[46],如圖11所示。并且,通過二維光柵實現分辨率為1 nm的二維位移測量[47],在常規的實驗環境中,系統分別在兩個坐標軸方向的25 mm測量范圍內的測量標準差為15 nm。2007年,李世光等人[48-49]在光柵位移測量系統中加入了單倍望遠鏡結構,使光路沿原路返回,提高了系統的對位公差和信噪比,如圖12所示。系統在20 mm測量范圍內達到33.71 nm的測量精度。2014年,Hsieh等人[50-53]采用半透半反的二維光柵,結合外差、光柵剪切和邁克爾遜干涉等原理,設計了一個能夠實現六維自由度測量的干涉系統,如圖13所示。系統的位移分辨率為2 nm,角度分辨率為0.05μrad。這些系統中都應用了許多偏振以及分光、折光元件,這些元件的偏擺誤差對于系統的穩定性會產生很大影響,如何精確固定這些元件也是一個需要解決的問題。
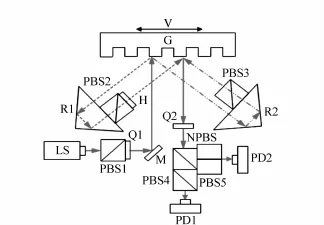
圖10 二次衍射系統原理圖Fig.10 Schematic diagram of double diffraction system
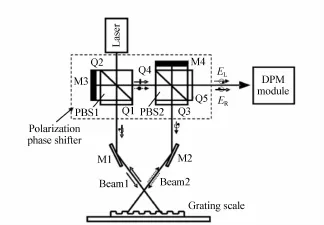
圖11 采用Littrow結構的光柵位移測量系統原理圖Fig.11 Schematic diagram of diffraction grating interferometer displacement measurement system with Littrow structure
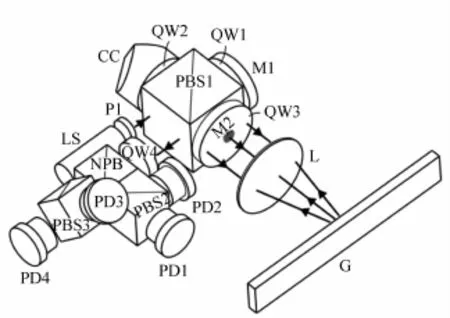
圖12 采用單倍望遠鏡結構的光柵位移測量系統原理圖Fig.12 Schematic diagram of diffraction grating interferometer displacement measurement system with DiLENS configuration
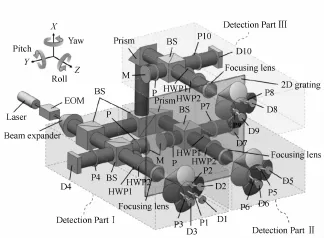
圖13 6-DOF測量系統原理圖Fig.13 Optical configuration for 6-DOF measurement system
2014年以來,清華大學[54-56]分別設計了能夠實現一維、二維以及三維自由度位移測量的外差光柵位移測量系統,并申請了相關專利[57-59]。其所設計的二維位移測量原理圖如圖14。該系統在x方向9 mm測量范圍內實現1.63 nm的分辨率,在z方向0.6 mm范圍內實現0.6 nm的分辨率。該系統中的光學元件大大減少并且采用雙頻激光以及光纖耦合,有利于提高系統的穩定性。
此外,國內外還有許多機構對光柵位移測量系統進行研究并在結構上做出了一些改進,如哈爾濱工業大學[60-64]、合肥工業大學[12,65-67]以及日本的索尼[68-70]等。基于衍射干涉原理的光柵位移測量系統理論上可以達到納米級分辨率及精度,再加上其對環境要求低的特點,非常適合于現代加工制造領域高精度位移測量,有著比較好的應用前景。
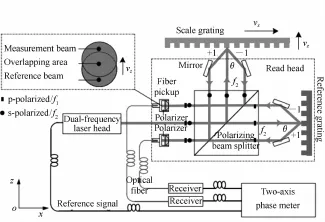
圖14 外差光柵位移測量系統原理圖Fig.14 Schematic diagram of the novel heterodynegrating interferometer system
4 存在的關鍵問題
人們對光柵干涉式精密位移測量系統的研究,無論在系統結構上還是在原理上都有了一定的創新和發展,相關產品和設備也應用在了不同測量需求中。但是,該位移測量系統還存在一些關鍵性問題需要我們去解決。
無論是利用何種原理和結構,光柵的制造精度影響著位移測量系統的精度,光柵的刻線密度影響著測量系統的分辨率,所以制造出高刻線密度、高精度的一維光柵以及二維光柵對位移測量系統非常重要。德國Heidenhain公司在地下15 m處建立了一處無塵、恒溫(溫度控制在0.01℃)的光柵刻蝕間,以保證光柵條紋的準確度和精度。并且該公司采用的DIADUR復制工藝,即在玻璃基板上蒸發鍍鉻的光刻復制工藝,可制造出高精度、價格低廉、抗污染能力強的刻度尺光柵。METALLUR生產工藝可以制造出高刻線密度的光柵,并應用在衍射干涉原理的光柵位移測量系統中。我國中科院長春光機所國家光柵制造與應用工程技術研究中心建有超潔凈光柵實驗室,溫度精度±0.02℃。并且擁有光柵母板生產能力,光柵批量復制能力,為我國高精度光柵制造奠定了堅實的基礎。
從上文對國內外的研究介紹可以看出當采用高刻線密度的光柵時,光柵位移測量系統的量程會大大縮小。原因就是目前的機械刻劃光柵,全息光柵以及它們的復制光柵都無法做大做長,這嚴重制約了光柵位移測量系統向大量程方向發展。提高長光柵的生產能力是國內外面臨的一個重要問題。為了解決制造長光柵的質量和時間問題,美國MIT利用掃描干涉場曝光(SBIL)技術制造出了高刻線密度,高精度長光柵[71]。我國中科院長春光機所國家光柵制造與應用工程技術研究中心也著力研究1.5m掃描干涉場曝光系統以及大面積光柵刻劃機,為制作高刻線密度大光柵和長光柵提供了保障。除此之外,還可以通過改進系統結構擴大量程。例如,尼康公司多讀數頭測量方案,通過讀數頭的交替測量實現量程的擴大。還可以考慮通過多光柵排列的方法擴大量程。
另外,光柵位移測量系統各元器件之間的偏擺和位置誤差等也是影響位移測量系統的精度重要因素。光學元件的固定方法采用粘合還是夾持,應當深入分析,尋找一種好的固定方案,盡量降低這些誤差對提升整個系統的性能尤為關鍵;隨著光柵位移測量系統精度的提高,采用更高精度的方法對其進行標定也是所面臨的一個問題,在許多研究中都是用激光干涉儀與之比較,由于環境變化影響激光干涉儀的穩定性,這種方法得出的結果也只能作為參考。要使得結果更具準確性,一方面盡量保證環境要達到要求,另一方面可以增加測量的次數或者采用不同測量方案,從而將環境的影響減到最小;此外,進一步縮小光柵位移測量系統讀數頭的體積,尤其是多維度測量系統的體積,找到光學元件更好的集成方案,最終使其產品化,擴大其應用范圍也是一個亟待解決的問題。
5 結束語
目前,衍射光柵干涉式一維位移測量系統已較為成熟,由于其測量維度低,結構相對簡單,讀數頭尺寸可以做到很小,相應的產品已經廣泛應用于測量領域;隨著二維光柵在光柵精密位移測量系統中的應用,一方面系統測量維度可以擴展到二維,另一方面相對于使用兩個一維光柵,二維光柵可以集成和簡化系統結構,有利于系統小型化設計,其產品也相繼出現;為了適應日益發展的精密加工技術,擴展光柵精密位移測量系統的應用范圍,研究者正努力將其擴展到三維位移測量甚至包含角度測量的六維自由度測量,在測量維度的擴大的同時保證高精度是目前該系統的一個研究熱點,上文對其有所提及,這些是基于衍射光柵干涉式精密位移測量系統在結構和功能上的發展。另外,在原理上系統由雙頻激光逐步取代單頻激光,并且結合了多普勒頻移、光柵剪切、邁克爾遜干涉等多原理于一體,有利于進一步提高了測量信號的質量。總之,基于衍射光柵的干涉式精密位移測量系統正在向高精度、大量程、多維度、小體積的方向發展。系統以其獨有的優勢,在精密位移測量中發揮著越來越重要的作用。相信隨著光柵制造技術的發展以及新的測量方法的提出,上述關鍵問題會得到相應解決,具有更高分辨率和精度,大量程、多維度測量以及更緊湊的結構等優點的光柵位移測量系統將廣泛應用于未來各種測量領域中。未來高精度測量會由于光柵位移測量系統的應用逐漸擺脫對環境的高要求,這將會是測量領域的一大進步。
[1] 陳寶剛,明名,呂天宇.大口徑球面反射鏡曲率半徑的精確測量[J].中國光學,2014,7(1):163-168. CHEN B G,MINGM,LV TY.Precisemeasurementof curvature radius for sphericalmirror with large aperture[J].ChineseOptics,2014,7(1):163-168.(in Chinese)
[2] 劉淑杰,張元良,張洪潮.透明軟質薄膜的表面形貌測量[J].中國光學,2014,7(2):326-331. LIU SH J,ZHANG Y L,ZHANG H CH.Profile measurement of thin transparentsoft film surface[J].Chinese Optics,2014,7(2):326-331.(in Chinese)
[3] BASILE G,BECKER P,BERGAMIN A,et al..Combined optical and X-ray interferometry for high-precision dimensional metrology[J].Proceedingsof the Royal Society A,2000,456(1995):701-729.
[4] ILEV I,KUMAGAIH,TOYODA K,et al..An alternative fiber-optic backreflectancemethod formeasurement of distances using a continuouswave laser[J].Review of Scientific Instruments,1996,67(3):662-665.
[5] 萬德安.激光基準高精度測量技術[M].北京:國防工業出版社,1999. WAN D A.Laser Precision Measurement Technology[M].Beijing:National Defense Industry Press,1999.(in Chinese)
[6] 昌學年,姚毅,閆玲.位移傳感器的發展及研究[J].計量與測試技術,2009,36(9):42-44. CHANG X N,YAO Y,YAN L.The development and investigation of displacement sensor[J].Metrology&Measurement Technique,2009,36(9):42-44.(in Chinese)
[7] 馬愛民,馬忠臣.超精密測量技術的應用進展[J].機械工程,2013,6:5. MA A M,MA ZH CH.Advances in application of precisionmeasurement technology[J].Mechanical Engineer,2013,6:5.(in Chinese)
[8] 周維來.光柵干涉儀在高精密測量中的技術和應用[J].工具技術,1994,1:37-42. ZHOUW L.The technology and application of grating interferometer in high precisionmeasurement[J].Tool Engineering,1994,1:37-42.(in Chinese)
[9] TEIMEL A.Technology and Application of Grating Interferometers in High-precision Measurement[M].Berlin:Springer Berlin Heidelberg,1991.
[10] 張善鐘.計量光柵技術[M].北京:機械工業出版社,1985. ZHANG SH ZH.Metrology Grating Technology[M].Beijing:China Machine Press,1985.(in Chinese)
[11] 曹向群.光柵計量技術[M].杭州:浙江大學出版社,1992. CAO X Q.Grating Measuring Technique[M].Hangzhou:Zhejiang University Press,1992.(in Chinese)
[12] 尚平.高精度衍射光柵干涉位移傳感器及關鍵技術研究[D].合肥:合肥工業大學,2012. SHANG P.Study on the key technology of high-resolution diffraction grating interferometric transducer of linear displacements[D].Hefei:Hefei University of Technology,2012.(in Chinese)
[13] 張金華,陳良洲,劉曉軍.雙光柵干涉位移傳感器原理及其誤差分析[J].光電技術應用,2012,3:41-45. ZHANG JH,SUN L ZH,LIU X J.Principle and error analysisof dual-grating interference displacement sensor[J].Electro-Optic Technology Application,2012,3:41-45.(in Chinese)
[14] 森山茂夫,鄭建棟.用衍射光柵進行精密位移檢測[J].國外計量,1984,6:11-13. SENSHAN M F,ZHENG JD.Precision displacementmeasurement with diffraction grating[J].Foreign Measurement,1984,6:11-13.(in Chinese)
[15] 呂海寶,曹聚亮,顏樹華,等.光柵式大量程高分辨率位移測量研究[J].中國機械工程,2000,11(8):878-880. LU H B,CAO JL,YAN SH H,et al..Research forwide range and high resolution displacementmeasurementwith grating[J].China Mechanical Engineering,2000,11(8):878-880.(in Chinese)
[16] HOLZAPFELW.Advancements in displacementmetrology based on encoder systems[C].Proceedings of the 23rd Annual ASPEMeeting,Portland,USA,2008.
[17] THIEL J,SPANNER E.Interferential linear encoderwith 270 mm measurement length for nanometrology[C].Proceedings of the 1st International Conference and generalmeeting of the European Society for Precision Engineering and Nanotechnology,Bremen,Germany,1999:419-422.
[18] LOF J,DERKSEN A T A M,HOOGENDAM C A,et al..Lithographic Apparatus and Device Manufacturing Method:US,6819400B2[P].2005-10-21.
[19] 鄭立.三光柵系統[J].光學儀器,1982,4(1):35-42 ZHENG L.Three grating system[J].Optical Instruments,1982,4(1):35-42.(in Chinese)
[20] 蘇紹璟,劉輝,呂海寶,等.納米級位移分辨率雙光柵系統的多普勒分析[J].光學精密工程,2003,11(1):17-21. SU SH J,LIU H,LU H B,et al..Doppler analysis for double-grating displacementmeasurement system with nanometer resolution[J].Opt.Precision Eng.,2003,11(1):17-21.(in Chinese)
[21] 盧國剛.SONY跨入皮米級檢測和加工時代[J].世界制造技術與裝備市場,2008,1:92. LU GG.SONY jumping to picometer world[J].Key Components for CNCMachine Tool,2008,1:92.
[22] SAWADA R,HIGURASHIE,OHGUCHIO,et al..Long-lifemicro-laser encoder[C].Proceedingsof the IEEE International Conference on Micro Electro Mechanical Systems,2000:491-495.
[23] SAWADA R,HIGURASHI E,ITO T,et al..Monolithic-integrated microlaser encoder[J].Applied Optics,1999,38(33):6866-6873.
[24] SAWADA R,OHGUCHIO,MISEK,etal..Fabrication of advanced integrated opticalmicro-encoder chip[C].Proceedings of the Micro Electro Mechanical Systems,1994,MEMS′94,IEEE,1994:337-342.
[25] SAWADA R,TANAKA H,OHGUCHIO,et al..Fabrication of active integrated opticalmicro-encoder[C].Proceedings of the Micro Electro Mechanical Systems,1991,MEMS′91,IEEE,1991:233-238.
[26] WAKAMOTO S,KANAYA Y,KOSUGIJ,et al..Actual performance data analysis of overlay,focus,and dose control of an immersion scanner for double patterning[J].SPIE,2010,7640:79-86.
[27] MAST F V D.Towards ultimate optical lithography with NXT:1950i dual stage immersion platform[J].SPIE,2010:7640:511-519.
[28] SHIBAZAKIY,KOHNO H,HAMATANIM.An innovative platform for high-throughput high-accuracy lithography using a single wafer stage[J].SPIE,2009,7274:72741-10.
[29] PASCH B V D,MAST F V D.Enabling the lithography roadmap:an immersion tool based on a novel stage positioning system[J].SPIE,2009,7274:72741S-8.
[30] WAKAMOTO S,KIKUCHIT,SHIRATA Y,etal..Stability and calibration of overlay and focus control for a double patterning immersion scanner[J].SPIE,2008,7973(6):3620-3625.
[31] LIX,GAO W,MUTO H,et al..A six-degree-of-freedom surface encoder for precision positioning of a p lanar motion stage[J].Precision Engineering Journal of the International Societies for Precision Engineering&Nanotechnology,2013,37(3):771-781.
[32] KIMURA A,GAOW,KIM W J,et al..A sub-nanometric three-axis surface encoderwith short-period planar gratings for stagemotionmeasurement[J].Precision Engineering,2012,36(4):576-585.
[33] GAOW,KIMURA A.A fastevaluationmethod for pitch deviation and out-of-flatness of a planar scale grating[J].CIRP Annals-Manufacturing Technology,2010,59(1):505-508.
[34] GAO W,KIMURA A.A Three-axis displacement sensor with nanometric resolution[J].CIRP Annals-Manufacturing Technology,2007,56(1):529-532.
[35] GAOW,DEJIMA S,KIYONO S.A dual-mode surface encoder for position measurement[J].Sensors&Actuators A Physical,2005,117(1):95-102.
[36] DEJIMA S,GAO W,SHIMIZU H,et al..Precision positioning of a five degree-of-freedom planar motion stage[J]. Mechatronics,2005,15(8):969-987.
[37] XU D M,WENGC F,LEIM R.Research on the high accuracy displacementmeasuring and display system[C].7th International Symposium on Testand Measurement,Chinese Society ofModern Technology Equipment,Beijing:International Academ ic Publishers,2007:3515-3518.(in Chinese)
[38] CHU X CH,LU H B,ZHAOSH H.Wide ranggrating interferometerwith nanometer resolution[J].Optp-electronic Engineering,2008,35(1):56-59.(in Chinese)
[39] CHU X CH,LU H B,CHEN T ZH,et al..Investigation on long-range nanometer resolution gratingmoire interferometer[J].SPIE,2004,5635:333-341.
[40] 杜列波.納米級光柵位移測量中關鍵技術的研究[D].長沙:國防科學技術大學,2004. DU L B.Research on key technology of nano scale grating displacement[D].Changsha:National University of Defense Technology,2004.(in Chinese)
[41] SU SH J,LU H B.High-speed great-capacity storing and processing technique of video sensor signal[J].SPIE,2000,4077:396-399.
[42] PU J,ZHANG H,NEMOTO S.Spectral shifts and spectral switches of partially coherent light passing through an aperture[J].Optics Communications,1999,162(1-3):57-63.
[43] POST D.Moire fringemultiplication with a nonsymmetrical doubly blazed reference grating[J].Applied Optics,1971,10(4):901-907.
[44] FAN K C,ZHANG Y L,MIAO JW,et al..Error compensation of grating interferometer due to angular error of linear stage[C].Proceedings of the Advanced Intelligent Mechatronics(AIM),IEEE,2012:428-431.
[45] FAN K C,LIU Y S,CHEN Y J,et al..A linear diffraction grating interferometer with high accuracy[J].SPIE,2006,6280:628008-6.
[46] KAO C F,LU SH,SHEN H M,et al..Diffractive laser encoder with a grating in littrow configuration[J].Japanese J.Applied Physics,2008,47(3):1833-1837.
[47] CHUNG Y C,FAN K C,LEEBC.Developmentof a novel planar encoder for2D displacementmeasurement in nanometer resolution and accuracy[C].Proceedings of the 9th World Congress on Intelligent Control and Automation(WCICA),Taiwan,China,2011:PID1723643.
[48] WU CC,WUW J,PAN ZS,etal..Laser linear encoderwith both high fabrication and head-to-scale tolerances[J].Applied Optics,2007,46(16):3169-3176.
[49] LEE CK,WU CC,CHEN SJ,etal..Design and construction of linear laser encoders that possess high tolerance ofmechanical runout[J].Applied Optics,2004,43(31):5754-5762.
[50] HSIEH H L,PAN SW.Development of a grating-based interferometer for six-degree-of-freedom displacement and angle measurements[J].Optics Express,2015,23(3):2451-2465.
[51] HSIEH H L,PAN SW.Three-degree-of-freedom displacementmeasurementusing grating-based heterodyne interferometry[J].Applied Optics,2013,52(27):6840-6848.
[52] HSIEH H L,CHEN JC,LERONDEL G,et al..Two-dimensional displacementmeasurement by quasi-common-opticalpath heterodyne grating interferometer[J].Optics Express,2011,19(10):9770-9782.
[53] HSIEH H L,LEE J Y,WU W T,et al..Quasi-common-optical-path heterodyne grating interferometer for displacement measurement[J].Measurement Science&Technology,2010,21(11):280-284.
[54] WANG L J,ZHANGM,ZHU Y,etal..American society for precision engineering a novel heterodyne grating interferometer system for in-plane and out-of-plane displacementmeasurementwith nanometer resolution[C].Proceedings of the Meeting of the American Society for Precision Engineering,ASPE,2014.
[55] LIN D,JIANG H,YIN C.Analysis of nonlinearity in a high-resolution grating interferometer[J].Optics&Laser Technology,2000,32(2):95-99.
[56] WANG L J,ZHANGM,ZHU Y,et al..Construction and accuracy testof a novel heterodyne grating interferomter system for two-dimensional displacementmeasurement[J].Laser,2013,89(3):69.
[57] 朱煜,張鳴,王磊杰,等.一種雙頻光柵干涉儀位移測量系統:中國,WO2014/071816A1[P].2013-02-20. ZHU Y,ZHANGM,WANG L J,et al..Dual-frequency grating interferometer displacementmeasurement system:China,WO2014/071816A1[P].2013-02-20.(in Chinese)
[58] 張鳴,朱煜,王磊杰,等.一種二自由度外差光柵干涉儀位移測量系統:中國,WO2014/201950A1[P].2013-09-18. ZHANGM,ZHU Y,WANG L J,et al..Displacementmeasurement system for two-degree-of-freedom heterodyne grating interferometer:China,WO2014/201950A1[P].2013-09-18.(in Chinese)
[59] 張鳴,朱煜,王磊杰,等.一種外差光柵干涉儀位移測量系統:中國,WO2014/071807A1[P].2013-02-27. ZHANGM,ZHU Y,WANG L J,et al..Heterodyne grating interferometer displacementmeasurement system:China,WO2014/201950A1[P].2013-02-27.(in Chinese)
[60] WEIP,LU Z,LIU L.Double-grating diffraction interferometric stylus probing system for surface profiling and roughness measurement[C].International Symposium on Precision Engineering Measurement and Instrumentation.International Society for Optics and Photonics,2015:94461N.
[61] 王雪英.基于衍射干涉原理的高精度光柵位移測量系統研究[D].哈爾濱:哈爾濱工業大學,2014.WANG X Y.Research of high-precision displacementmeasurementsystem based on the principle of diffraction and interference[D].Harbin:Harbin Institute of Technology,2014.(in Chinese)
[62] LIN J,GUAN J,MA L,etal..Effects of parameters of Bessel-Gaussian on the achievementof optical needlewith longitudinal polarization[J].SPIE,2013,8759:875937.
[63] 徐敏兒.基于衍射光柵的高分辨力位移測量系統研究[D].哈爾濱:哈爾濱工業大學,2013. XU M E.Research on and high-resolution displacementmeasurement system based on diffractive grating[D].Harbin:Harbin Institute of Technology,2013.(in Chinese)
[64] 邸晶晶.基于衍射光柵的高精度位移測量系統的設計[D].哈爾濱:哈爾濱工業大學,2012. DIJJ.Design of high-precision displacementmeasurementsystem based on diffractive grating[D].Harbin:Harbin Institute of Technology,2012.(in Chinese)
[65] CHENG F,FAN K C.An improved design of the linear diffraction grating interferometer[C].Proceedings of ASPEN20009,Kitakyushu,Japan,2009.
[66] XIA H J,FEIY T,WANG Z Y.Basic theoretical research about the 2-D diffraction grating in nano-scalemeasurement[R],ISIST2004,1226-1231.
[67] 劉玉圣,范光照,陳葉金.高精度線性衍射光柵干涉儀的研制[J].工業計量,2006,16(2):1-3. LIU Y SH,FAN G ZH,CHEN Y J.A research on diffraction grating interferometer with high accuracy[J].Industrial Measurement,2006,16(2):1-3.(in Chinese)
[68] AKIHIRO K.Optical displacementmeasurement system:US,6407815B2[P].2002-06-18.
[69] KURODA A.Optical disp lacement measurement system for detecting the relative movement of a machine part:US,6166817[P].2000-12-26.
[70] TANIGUCHIK,TSUCHIYA H,TOYAMA M.Optical instrument formeasuring displacement:US,4676645[P].1987-06-30.
[71] SCHATTENBURG M L,SMITH H I.The critical role ofmetrology in nanotechnology[J].SPIE,2002,4608:116-124.
Interferometric precision displacementmeasurement system based on diffraction grating
LV Qiang1,2,LIWen-hao1*,Bayanheshig1,BAIYang3,LIU Zhao-wu1,2,WANGWei1,2
(1.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China;
2.University of Chinese Academy of Sciences,Beijing 101408,China;
3.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China)*Corresponding author,E-mail:leewenho@163.com
This paper introduces the principlesand the characteristics of the grating displacementmeasurement system based on geometric moire fringe and the principle of diffraction and interference.It summarizes the research progress of the diffraction grating interferometer displacementmeasurement system at home and abroad and its key problems and development trend.The advantages of the diffraction grating interferometer displacementmeasurement system are that low the effect of environment requirement,high resolution and precision,compact structure and low cost.The problems of this system needed to be solved include how to improve the fabrication and installation accuracy of grating and optical components,and seek a higher accuracy of detectionmeans to calibrate the grating displacementmeasurement system and so on.The development trend of the system is higher resolution and accuracy,larger range,multi-dimensionalmeasurement and more compact structure.The diffraction grating interferometer displacement measurement system will have a wider application prospect in the field ofmodern industrial processing and manufacturing.
displacementmeasurement;grating;diffraction interference;high precision
TN247;TH744.3
:A
10.3788/CO.20171001.0039

呂 強(1992—),男,山東德州人,碩士研究生,2014年于山東師范大學獲得學士學位,主要從事光柵精密位移測量等方面的研究。E-mail:lq_0119@126.com

李文昊(1980—),男,內蒙古赤峰人,博士,研究員,2002年于陜西科技大學獲學士學位,2008年于中國科學院長春光學精密機械與物理研究所獲博士學位,主要從事平面、凹面全息光柵的理論設計及制作工藝等方面的研究。E-mail:leewenho@163.com
2095-1531(2017)01-0039-12
2016-08-22;
2016-09-16
國家重大科研儀器設備研制專項(No.61227901)
Supported by the National Science and Technology Major Project of the Ministry of Science and Technology of China(No.61227901)
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
