船舶動力定位系統(tǒng)及其控制技術(shù)
2017-03-12 16:35:52張新放關(guān)克平
水運(yùn)管理 2017年1期
張新放++關(guān)克平


【摘 要】 為使船舶或作業(yè)平臺在海上航行或作業(yè)時更好地保持航跡或穩(wěn)定在某一工作水域范圍內(nèi),對船舶的定位精度提出更高的要求。闡述船舶動力定位系統(tǒng)的定義、組成、工作原理、研究狀況及其數(shù)學(xué)模型等,指出控制技術(shù)的快速發(fā)展和智能化,使其在動力定位系統(tǒng)中的應(yīng)用越來越廣泛;分析幾種不同時期基于不同控制技術(shù)的船舶動力定位控制器的原理,闡述船舶動力定位系統(tǒng)未來的發(fā)展趨勢,從而對今后的研究起到一定的參考作用。
【關(guān)鍵詞】 動力定位系統(tǒng);控制技術(shù);船舶;數(shù)學(xué)模型
隨著海洋經(jīng)濟(jì)時代的到來,人們對海洋資源的需求越來越多。由于深海環(huán)境復(fù)雜多變,因而對獲取海洋資源的裝置定位精度要求也越來越高。傳統(tǒng)的錨泊系統(tǒng)有拋起錨操作過程繁瑣、定位精度和機(jī)動性差等缺陷,難以符合定位精度的要求;而船舶動力定位系統(tǒng)(以下簡稱“DP系統(tǒng)”)則在保持航跡或保持位置方面具有突出的優(yōu)勢,已被逐漸應(yīng)用到海上航行船舶和作業(yè)平臺上,快速發(fā)展的控制理論在DP系統(tǒng)中的應(yīng)用,取得了很好效果。[1]
1 DP系統(tǒng)概述
1.1 定 義
DP系統(tǒng)是指不依靠外界的輔助,通過固有的動力裝置來對船舶或作業(yè)平臺進(jìn)行定位的一種閉環(huán)控制系統(tǒng),系統(tǒng)包括控制系統(tǒng)、測量系統(tǒng)和推進(jìn)系統(tǒng),控制系統(tǒng)是其核心。
1.2 組成
DP系統(tǒng)由控制系統(tǒng)、測量系統(tǒng)和推力系統(tǒng)組成。控制系統(tǒng)是整個系統(tǒng)的核心,對測得的信息和外界干擾信號進(jìn)行處理,能夠通過計算推算出抵抗外界干擾的推力,并傳遞給推力系統(tǒng)。測量系統(tǒng)能夠獲得船舶運(yùn)動所需要的信息,其種類有DGPS、電羅經(jīng)、張緊索系統(tǒng)、水下聲吶系統(tǒng)、垂直參考系統(tǒng)、風(fēng)力傳感器等。推力系統(tǒng)根據(jù)控制系統(tǒng)計算出的推力來控制船舶。
1.3 研究狀況
第1代DP系統(tǒng)的研發(fā)始于1960年。鉆井船“Eureka”號是世界上第一艘基于自動控制原理設(shè)計的DP船舶。該船配備的DP模擬系統(tǒng)與外界張緊索系統(tǒng)相連。該船除裝有主推力系統(tǒng)外,在還在船首和船尾裝有側(cè)推力系統(tǒng),在船身底部也安裝有多臺推進(jìn)器。
第2代DP系統(tǒng)始于1970年,具有代表性的是“SDEC0445”號船,該船安裝有多臺推進(jìn)器,系統(tǒng)的控制器采用kalman濾波等現(xiàn)代控制技術(shù),且控制系統(tǒng)中的元件有冗余,其安全性、穩(wěn)定性和作業(yè)時間均有了較大的改善和提高。
第3代DP系統(tǒng)始于1980年。系統(tǒng)采用微機(jī)處理技術(shù)和Muti-bus、Vme等多總線標(biāo)準(zhǔn)的控制系統(tǒng)。代表性的第3代DP系統(tǒng)有挪威Konsberg公司的AD-P100、AD-P503系列產(chǎn)品和法國的DPS800系列產(chǎn)品。
我國對DP系統(tǒng)的研究開展得較晚,研究力量集中在高校和科研院所。我國自主研制和建造的“大洋一號”科考船(圖1),是我國首艘安裝DP系統(tǒng)的船舶。[2]
圖1 “大洋一號”科考船
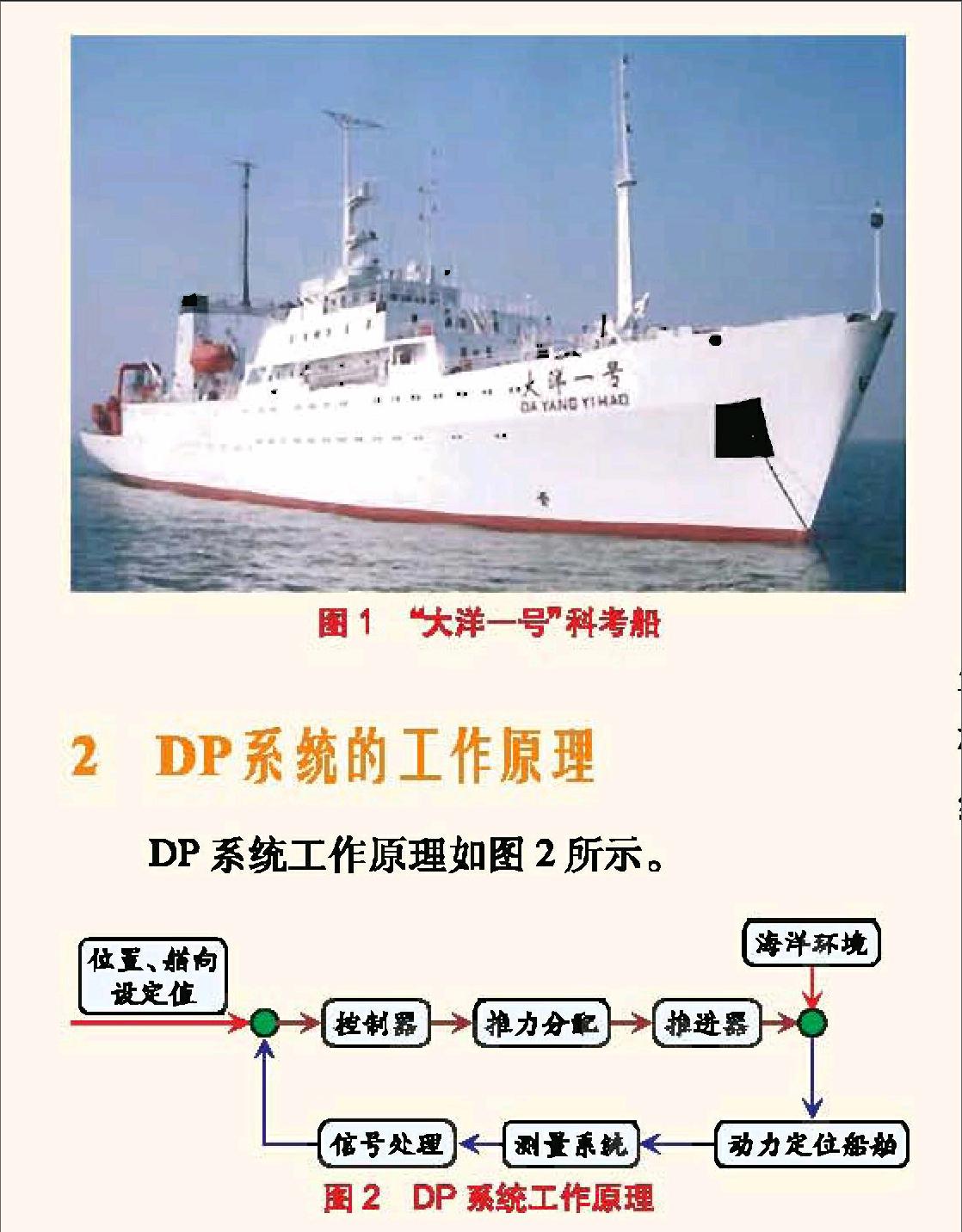
2 DP系統(tǒng)的工作原理
DP系統(tǒng)工作原理如圖2所示。
DP系統(tǒng)中的測量系統(tǒng)在獲得信息(內(nèi)外部噪聲、船舶搖蕩、船舶傾斜、環(huán)境干擾等信息)后,將信息與系統(tǒng)初始設(shè)定值加以比較,對干擾信號進(jìn)行弱化,消除不正確的信息;DP系統(tǒng)中的控制系統(tǒng)由獲取的差值計算出所要施加的力,將其按照一定的方法進(jìn)行分配;DP系統(tǒng)中的推進(jìn)系統(tǒng)計算出完全抵抗外界干擾的力的大小:閉環(huán)系統(tǒng)最終使船舶穩(wěn)定在預(yù)期的位置或航跡線上。[3]
3 DP系統(tǒng)的數(shù)學(xué)模型
船舶在海上作業(yè)或處于航行狀態(tài)時,其運(yùn)動(包括高頻運(yùn)動和低頻運(yùn)動)情況是極其復(fù)雜而多變的。由于高頻運(yùn)動不會使船位發(fā)生變化,故在建模時忽略其影響,只考慮低頻運(yùn)動引起的干擾。
3.1 定位坐標(biāo)系的建立
建立水平面內(nèi)的固定坐標(biāo)系NE和隨船坐標(biāo)系XY(圖3)。
船舶的位置和艏向矢量為 =[x,y, ]T,速度矢量為 =[u,v,r]T,(其中: x,y分別為船舶縱向、橫向位置坐標(biāo); 為船舶艏向角; u,v為船舶橫蕩、縱蕩速度; r為船舶艏向角速度。
兩者的轉(zhuǎn)換關(guān)系如下。
=J( ) (1)
其中轉(zhuǎn)換矩陣J( )為:
J( )=(2)
且J( )為非奇異陣,即:
JT( )=J -1( )(3)
3.2 數(shù)學(xué)模型的建立
為便于描述船舶的運(yùn)動,假設(shè)船舶質(zhì)量分布均勻、左右對稱且視為剛體,得經(jīng)簡化的船舶的運(yùn)動模型
M + D( ) =C + S(4)
式中: M為慣性矩陣; 為速度的變化率; D( )為阻尼系數(shù)矩陣; C為控制輸入量; S 為外界干擾力矩。
M=(5)
式中: m為船舶質(zhì)量; mX,mY,mN為船舶在縱蕩、橫蕩、艏搖上的附加質(zhì)量; xG 為船舶重心在縱向的位置坐標(biāo); FY為耦合的附加質(zhì)量; I為船舶轉(zhuǎn)動慣量。
阻尼系數(shù)矩陣為D( )=(6)
式中:a,b,c,d,e為三自由度的線性阻尼系數(shù)。
可選取某一船模為對象,利用Clarke整理的水動力導(dǎo)數(shù)估算公式計算M和D( )。
4 DP系統(tǒng)的控制技術(shù)
4.1 傳統(tǒng)的PID控制技術(shù)
第1代DP系統(tǒng)的控制器采用的是傳統(tǒng)的PID控制技術(shù),對船舶在縱蕩、橫蕩和艏搖三自由度進(jìn)行分析,剔除高頻干擾。PID控制技術(shù)因其為線性系統(tǒng),故其缺點(diǎn)是系數(shù)的選擇較復(fù)雜;而DP系統(tǒng)是非線性系統(tǒng),這使得其他控制技術(shù)得以發(fā)展和應(yīng)用到DP控制器的設(shè)計之中。
4.2 非線性控制技術(shù)
非線性理論具有性能改善、非線性分析、處理模型中不確定項(xiàng)等特點(diǎn)。由于DP系統(tǒng)以及外界的干擾均為復(fù)雜的非線性,用該方法處理有一定的優(yōu)越性。對DP船舶設(shè)計一個非線性觀測器,其穩(wěn)定性通過Lapunov理論證明,能從輸出值中估計船舶的位置和速度以及環(huán)境干擾力等信息。[4] 針對DP控制系統(tǒng)的特點(diǎn),將自抗擾控制器(ADRC)引入到DP系統(tǒng)中,用三階擴(kuò)張狀態(tài)觀測器估計船舶的艏向、速度等信息,通過反饋對誤差和干擾加以補(bǔ)償,設(shè)計一種具有較強(qiáng)魯棒性和適應(yīng)性的控制器。[5]
4.3 自適應(yīng)控制技術(shù)
自適應(yīng)控制技術(shù)基于數(shù)學(xué)模型,解決參數(shù)的不確定性,將外界的干擾值看作常量,基于矢量逆推非線性設(shè)計工具,引入積分環(huán)節(jié),設(shè)計DP系統(tǒng)的自適應(yīng)PID控制器,最后用Lyapunov函數(shù)證明該控制器的穩(wěn)定性,并控制律使得艏向、速度等信息漸近于期望值。
4.4 智能控制技術(shù)
智能控制技術(shù)采用的是人的思維具有非線性的特點(diǎn)加以控制,具有較好的效果。在DP系統(tǒng)中引入自適應(yīng)模糊控制,通過提出基于人工神經(jīng)網(wǎng)絡(luò)的控制方法,能夠任意調(diào)節(jié)目標(biāo)函數(shù)適應(yīng)高精度的定位和節(jié)約能量,前饋控制能適應(yīng)不同的環(huán)境干擾。[6]
將幾種控制方法相結(jié)合來設(shè)計新型組合式的控制系統(tǒng),能夠融合各自控制方法的優(yōu)點(diǎn),彌補(bǔ)單一控制方法自身的缺點(diǎn),在今后的研究中將會受到廣泛的關(guān)注。
參考文獻(xiàn):
[1] 馬超,莊亞鋒,陳俊英.船舶動力定位系統(tǒng)技術(shù)[J].中國造船,2009(11):52-57.
[2] 趙志高,楊建民,王磊.動力定位系統(tǒng)發(fā)展?fàn)顩r及研究方法[J].海洋工程,2002(1):91-97.
[3] 邊信黔,付明玉,王元慧.船舶動力定位[M].北京:科學(xué)出版社,2011.
[4] 何黎明,田作華,施頌椒.動力定位船舶的非線性觀測器設(shè)計[J].上海交通大學(xué)學(xué)報,2003(6):964-968.
[5] 趙大威,邊信黔,丁福光.非線性船舶動力定位控制器設(shè)計[J].哈爾濱工程大學(xué)學(xué)報,2011(1):57-61.
[6] 李定,顧憋祥.自適應(yīng)神經(jīng)網(wǎng)絡(luò)用于船舶動力定位系統(tǒng)[J].中國造船,1995(4):20-28.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
電子制作(2019年7期)2019-04-25 13:16:50
中國船檢(2017年3期)2017-05-18 11:33:09
上海大中型電機(jī)(2017年4期)2017-02-06 05:27:06
照明工程學(xué)報(2016年3期)2016-06-01 12:17:56
電測與儀表(2014年1期)2014-04-04 12:00:32