面向多向3D打印的混聯(lián)機構及其運動分析
2017-03-14 03:49:42秦友蕾
中國機械工程 2017年5期
周 輝 丁 銳 秦友蕾 曹 毅
1.江南大學機械工程學院,無錫,2141222.江南大學江蘇省食品先進制造裝備技術重點實驗室,無錫,214122
面向多向3D打印的混聯(lián)機構及其運動分析
周 輝1, 2丁 銳1, 2秦友蕾1, 2曹 毅1, 2
1.江南大學機械工程學院,無錫,2141222.江南大學江蘇省食品先進制造裝備技術重點實驗室,無錫,214122
為解決多向3D打印裝備瓶頸問題,提出一種完全解耦五自由度混聯(lián)機構作為3D打印的執(zhí)行機構,該機構由并聯(lián)模塊3-CPaRR和串聯(lián)模塊RRo組成,其中并聯(lián)模塊由3條相同CPaRR支鏈構成,可實現(xiàn)空間的三維移動,串聯(lián)模塊RRo用于調整打印頭姿態(tài),改善3D打印過程中的臺階現(xiàn)象、干涉問題。基于約束螺旋理論,分析了3CPaRR&RRo機構自由度,并通過ADAMS建模對其進行了驗證。然后運用D-H法求得混聯(lián)機構的運動學方程,對機構的位姿正解表達式求導,得到了機構的雅可比矩陣和末端速度方程,分析了機構在工作空間內的奇異性問題,通過對模型運動仿真,繪制出了機構末端輸出速度曲線,驗證了上述分析的正確性。
多向3D打印;混聯(lián)機構;完全解耦;螺旋理論;運動學
0 引言
3D打印技術(增材制造)誕生于20世紀80年代中后期[1],它是根據(jù)三維 CAD設計數(shù)據(jù),采用分層、疊加成形的方式逐層增加材料來生成三維實體的。3D打印在復雜結構件制造、文物修復、生物醫(yī)學領域具有廣闊的應用前景,是傳統(tǒng)制造技術的有益補充[2]。目前,大部分3D打印都采用單向分層熔融沉積技術,即打印頭姿態(tài)固定,沿著垂直于打印頭方向運動,這種方法具有軌跡規(guī)劃簡單、制造速度較快、成本低等優(yōu)點。但這種打印模式也存在明顯的缺點:打印的產(chǎn)品表面質量比較差,易出現(xiàn)不光滑的臺階形狀[3];在有些現(xiàn)有零件上增加幾何特征比較困難;打印的產(chǎn)品力學性能具有方向性。為了解決這些問題,人們提出了在打印過程中調整打印頭姿態(tài)的技術,即多向3D打印(multi-direction 3D printing)技術。多向3D打印技術可以顯著改善單向3D打印過程中的臺階現(xiàn)象、干涉問題和材料特性的方向性。
實現(xiàn)多向3D打印技術的關鍵是3D打印設備。商用的3D打印設備大多是基于三平動的串聯(lián)機構,這些設備可實現(xiàn)單向分層3D打印。為了實現(xiàn)多向分層3D打印,一些具有更高自由度的3D打印設備相繼出現(xiàn),它們主要通過兩類方法實現(xiàn)多向3D打印,一類是通過旋轉工件平臺,配合打印頭的三自由度平動[4-5];另外一類是通過增加打印頭的自由度[6-9],使其具備改變姿態(tài)的能力。但由于這些均為串聯(lián)式結構,具有誤差累積的特點,精度低,懸臂式結構剛度差,所以這類裝備的打印質量和效率均不理想。這些缺點促使學者們開始研究開發(fā)并聯(lián)式3D打印設備,出現(xiàn)了一些基于Delta、Stewart機構的并聯(lián)式3D打印設備[10],這些并聯(lián)機構雖然可以用于多向3D打印,但存在動力學模型復雜、路徑規(guī)劃難、柔性差、對簡單的打印任務驅動超冗余且經(jīng)濟性差等缺點。然而,完全解耦混聯(lián)機構很好地解決了上述串并聯(lián)式結構的問題,不僅具有高精度,高剛度的特征,而且控制簡單。
本文基于文獻[11-12]構型方法提出一種完全解耦3T2R五自由度混聯(lián)機構,將其作為多向3D打印機的結構本體,同時對其運動性能進行了分析研究。
1 多向3D打印機構描述
多向3D打印機的結構本體采用一種新型3CPaRR&RRo混聯(lián)機構,其中C為圓柱副、Pa為平行四邊形鉸鏈、R為轉動副、RRo為兩個轉動副軸線交于公共點,它由并聯(lián)模塊3-CPaRR和串聯(lián)模塊RRo構成,并聯(lián)模塊3-CPaRR能夠實現(xiàn)空間的三維移動,主要用以保證3D打印設備具有良好的剛性、較快的打印速度,可單獨作為單向3D打印設備的執(zhí)行機構,串聯(lián)模塊RRo用于打印過程中調整打印頭姿態(tài),改善3D打印過程中的臺階現(xiàn)象、干涉問題。多向3D打印機構CAD模型如圖1所示。并聯(lián)模塊3-CPaRR由3條完全相同支鏈CPaRR將動平臺和支架相連,每條分支都具有5個自由度,3條支鏈中與定平臺連接的3個圓柱副,其軸線相互垂直,3D打印頭通過兩個交于一點的轉動副和動平臺連接。
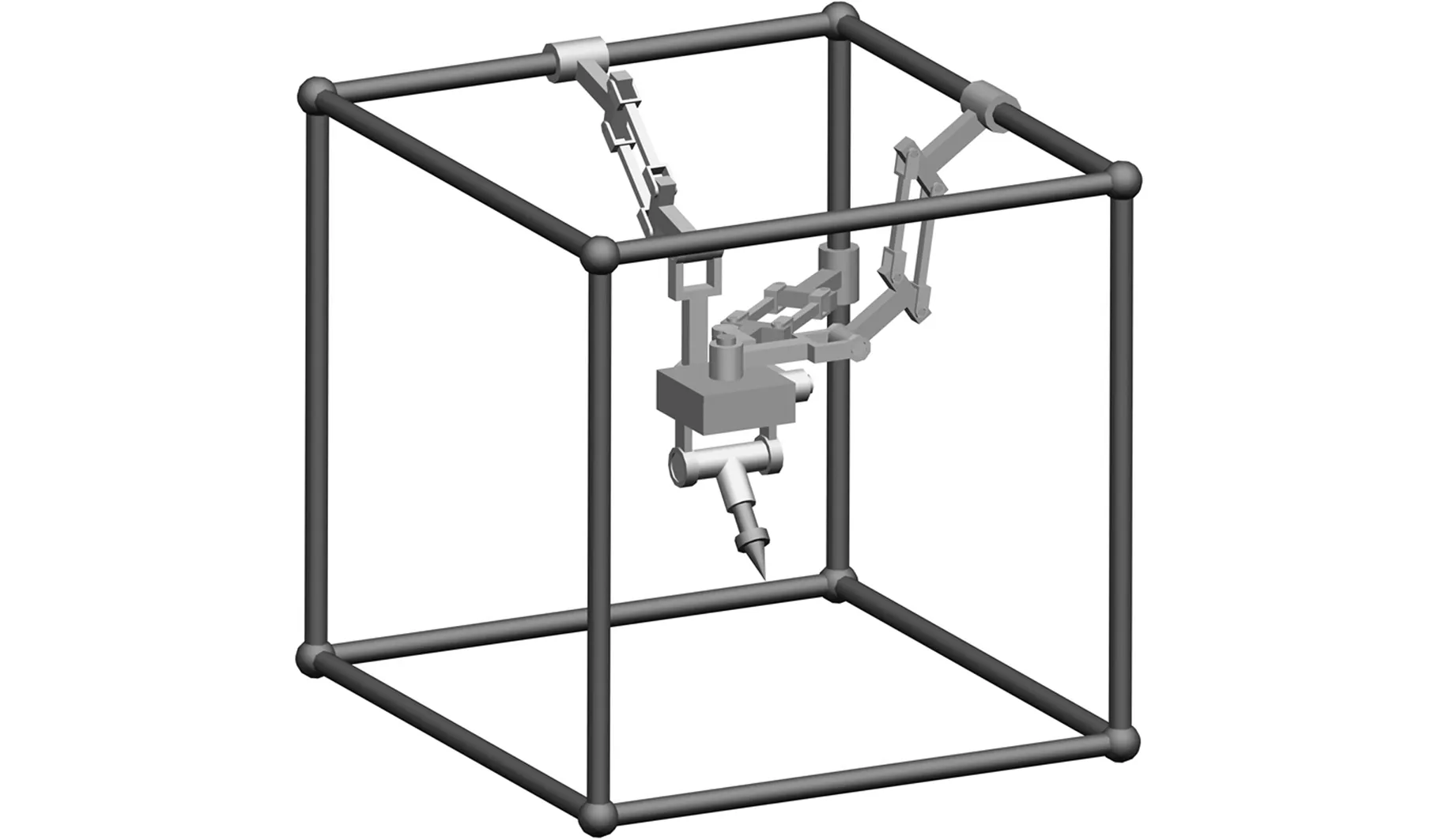
圖1 多向3D打印機構CAD模型Fig.1 A CAD model of mechanism for multi-direction 3D printing
如圖2所示,將每個支鏈的每個運動副進行編號,可以表示成第i條支鏈的第j個運動副,串聯(lián)模塊的轉動副為R4、R5。3條支鏈中圓柱副為Ci1、平行四邊形鉸鏈為Pai2、轉動副Ri3的軸線互相平行,2個轉動副Ri4、Ri3的軸線垂直,與動平臺連接的轉動副Ri4軸線相互垂直(i=1,2,3),3條支鏈的第一個圓柱副Ci1正交放置。按照圖2所示,將定坐標系OXYZ設在定平臺3個相互垂直的軸上,軸心為O,以第1條支鏈為例,則C11平行于Y軸,Pa12中4個轉動軸線平行于Y軸,R13平行于Y軸。R14平行于動平面與轉動副R13垂直。串聯(lián)模塊的轉動副R4軸線平行于Y軸,轉動副R4、R5軸線垂直并且兩個軸線交于一點。
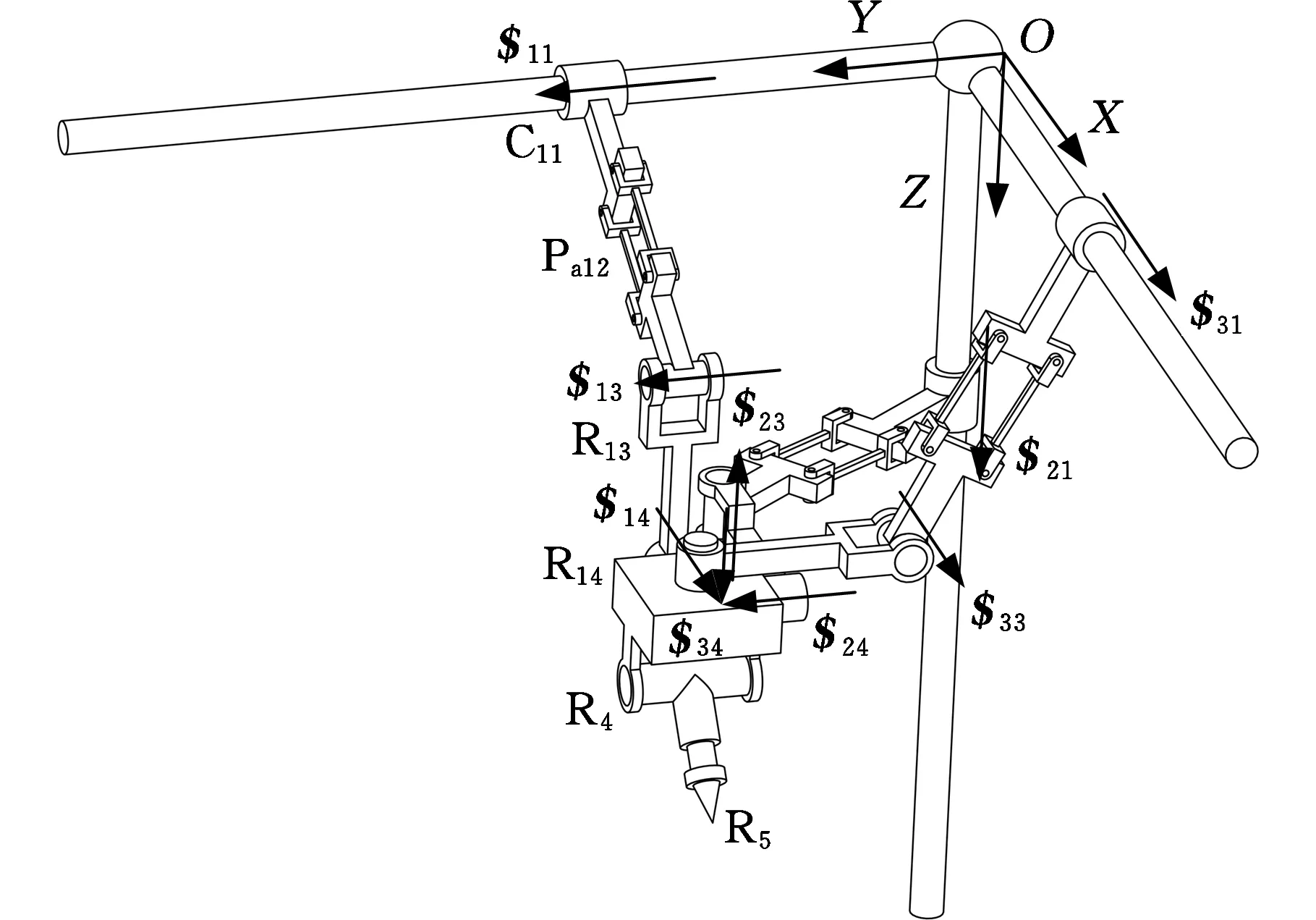
圖2 3CPaRR&RRo混聯(lián)機構Fig.2 A 3CPaRR&RRo hybrid mechanism
2 混聯(lián)機構的約束分析
2.1 混聯(lián)機構3CPaRR&RRo的自由度分析
運用修正的Grübler-Kutzbach通用自由度計算公式[13]:
(1)
式中,M為機構的自由度;d為機構的階數(shù);n為包括機架的構件數(shù)目;g為運動副的數(shù);fi為第i個運動副的自由度;μ為過約束數(shù);ζ為局部自由度。
將3CPaRR&RRo混聯(lián)機構導入到ADAMS中的Model Verify模塊驗證上述機構自由度,經(jīng)驗證機構自由度數(shù)為5。
對于混聯(lián)機構中的并聯(lián)模塊,如圖2所示$ij為第i條支鏈的第j個運動副的運動螺旋。3CPaRR并聯(lián)機構中的Pa平行四邊形鉸鏈可用一個等效廣義移動副替代,則支鏈可認為由4個運動副CPRR組成。并聯(lián)機構的等效支鏈一的運動螺旋系為
(2)
其中,d12、f12、d13、f13、e14、f14為非零實數(shù)。
由式(2)運動螺旋可得約束螺旋系為
(3)
支鏈二的運動螺旋系為
(4)
其中,d22、e22、d23、e23、d24、f24為非零實數(shù)。
由式(4)運動螺旋可得約束螺旋系為
(5)
支鏈三的運動螺旋系為
(6)
其中,e32、f32、e33、f33、d34、e34為非零實數(shù)。
由式(6)運動螺旋可得約束螺旋系為
(7)
并聯(lián)機構3CPaRR約束螺旋系為
(8)
式(8)表明,3條支鏈對動平臺作用了3個力偶。這3個力偶彼此線性無關,剛好限制了動平臺上的3個轉動,所以此并聯(lián)模塊可以實現(xiàn)空間三維移動,再加上串接在動平臺上的兩個轉動,此混聯(lián)機構具有三移兩轉五個自由度。
2.2 機構輸入運動副選擇
選取與定平臺相連的三個在空間相互垂直的圓柱副的移動特征為輸入,對于串聯(lián)模塊的RRo驅動副分別是R4、R5。根據(jù)螺旋理論的并聯(lián)機構驅動選取方法,如果輸入運動選取正確,當輸入運動副被約束時,則動平臺的約束螺旋系的最大線性無關數(shù)為6[14]。此時,限制這三個圓柱副移動特征后,對每條支鏈的運動螺旋分別求其反螺旋,可得到動平臺的約束螺旋系為
(9)
顯然式(9)中約束螺旋矩陣的秩是6,此時的動平臺自由度是0。將3CPaRR&RRo混聯(lián)機構導入到ADAMS中的Model Verify模塊,設定3個圓柱副以及與機構末端連接的兩個轉動副RRo為5個驅動副,5個驅動副驅動時其機構的自由度為0,故輸入運動副選取正確。
2.3 消極運動副判定
設固定在動平臺上的點F的角速度矢量為ωn,線速度矢量為vn,則動平臺的運動螺旋為
(10)

將支鏈1的運動螺旋系代入式(10)中,可得
(11)
由于并聯(lián)模塊只能三維移動,所以ωn=(0,0,0)T,代入式(11)中可得
(12)
由此可以看出支鏈1的轉動副R14的轉動速度為0。同理可知,支鏈2與支鏈3的轉動副R24、R34的轉動速度為0。因此并聯(lián)模塊各支鏈與動平臺連接的轉動副在機構發(fā)生運動時均不發(fā)生轉動,是個消極的運動副。并聯(lián)機構3CPaRR可以簡化為完全對稱的3-CPaR機構。
3 多向3D打印機構的運動學分析
3.1 并聯(lián)模塊位置分析
如圖3所示,將定坐標系OXYZ設在定平臺上,動坐標系fxyz設置在動平臺的幾何中心上,動平臺長為lx,寬為ly。支鏈一中圓柱副C11的起始點位于A0,距O點距離為Dx,圓柱副C11的移動輸入為q1。支鏈二中起始點距O點距離為Dy,圓柱副C21的移動輸入為q2。支鏈三中起始點距O點距離為Dz,圓柱副C31的移動輸入為q3。設支鏈一中第一個零件AB的長度為a,平行四邊形鉸鏈中構件BC的長度為b,零件CD的長度為c,連桿DE的距離為d,E點距離動平臺中心點f的距離為h,由于機構具有三條相同的支鏈,故支鏈二、支鏈三具有與支鏈一相同的參數(shù),三條支鏈中,圓柱副C11、C21與平面OXY所成

圖3 3CPaRR并聯(lián)模塊運動參數(shù)Fig.3 Kinematic parameters of 3CPaRR parallel mechanism
角度分別為θ11、θ21,平行四邊形鉸鏈Pa12、Pa22與平面OXY所成角度分別為α1、β1,圓柱副C31軸線和平行四邊形鉸鏈Pa32與平面OYZ所成角度分別為θ31、γ1。
根據(jù)圖5的幾何關系,可得動平臺中心點f的坐標。對于第一條支鏈:
f=(Dx-q1,acosθ11+(b+c)cosα1+
d,asinθ11+(b+c)sinα1+h)
(13)
對于第二條支鏈:
f=(acosθ21+(b+c)cosβ1+0.5lx,Dy-q2,
asinθ21+(b+c)sinβ1+d)
(14)
對于第三條支鏈:
f=(asinθ31+(b+c)sinγ1+d,acosθ31+
(b+c)cosγ1+0.5ly,Dz-q3)
(15)
由式(13)~式(15)可得
(16)
由此可以得到3CPaRR機構的運動學正解為
(17)
由式(13)可以得到運動學的逆解為
(18)
3.2 串聯(lián)模塊位置分析
串聯(lián)機構位置分析通常基于D-H方法[15],該方法通過建立D-H參數(shù)來描述連桿間的相對關系,并將其用矩陣表示,通過連桿矩陣復合變換求解出末端的變換矩陣,建立運動方程[16]。
如圖4所示,建立各連桿的坐標系,對應的D-H參數(shù)如表1所示。
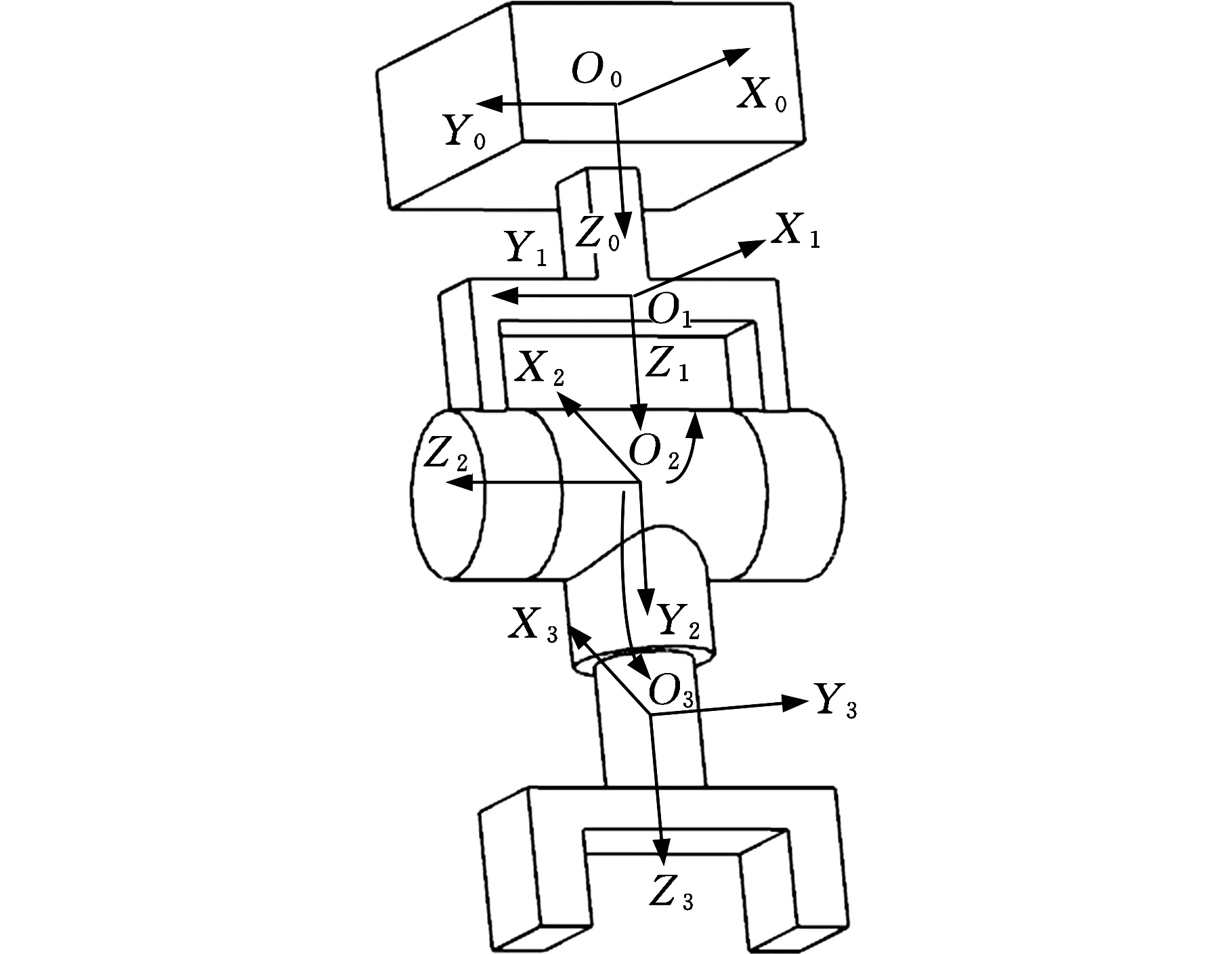
圖4 串聯(lián)模塊坐標系分布Fig.4 Coordinate system of modules in series

關節(jié)iαi-1(°)ai-1(mm)di(mm)θi(°)29000θ23-9000θ3
將D-H坐標參數(shù)代入式(18)可以求解出連桿的齊次變換矩陣為
機構末端相對于坐標系1的變換矩陣為
(19)
坐標系1相對于動平臺的變換矩陣為
(20)
那么機構末端相對于并聯(lián)模塊動平臺的變換矩陣,也即串聯(lián)機構正運動學方程為
(21)
3.3 混聯(lián)機構位置分析
(22)
(x0,y0,z0)為并聯(lián)機構動平臺上點f相對于靜坐標系坐標原點O的位置。T為3CPaRR&RRo混聯(lián)機構的運動學正解。所以
則此混聯(lián)機構的位置方程為
(23)
把式(16)代入式(23)中可以得到
(24)

(25)
式中,sα=sinα,cα=cosα,sβ=sinβ,cβ=cosβ,sγ=sinγ,cγ=cosγ。
將歐拉角公式和機構的姿態(tài)方程對應起來,可以得到:
(26)
由式(26)可以得到混聯(lián)機構姿態(tài)ɑ、β、γ的正解為
(27)
4 混聯(lián)機構速度分析
混聯(lián)機構的速度為機構位置對時間的一階導數(shù),故對式(23)求導可得末端執(zhí)行器的線速度為
(28)
混聯(lián)機構的角速度為機構的姿態(tài)對時間的一階導數(shù),故對式(27)求導可得末端執(zhí)行器的角速度為
(29)
由式(25)可得
(30)
(31)
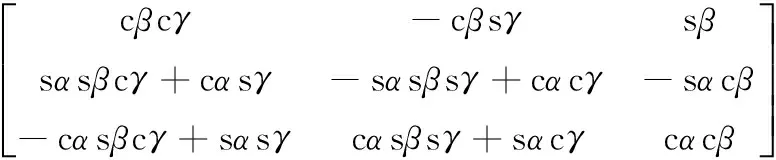
則機構的雅可比矩陣為
(32)
觀察發(fā)現(xiàn)式(32)為一個5×5的對角矩陣,由完全解耦定義可知當速度雅可比矩陣為對角陣時,混聯(lián)機構的運動具有完全解耦性。
五自由度3CPaRR&RRo混聯(lián)機構的奇異問題可以通過J矩陣的秩進行分析判斷[15]。由于此雅可比矩陣為一個5×5對角陣,故可以確定該多向3D打印機構在工作空間內不存在奇異位形。
5 多向3D打印機構的運動學仿真
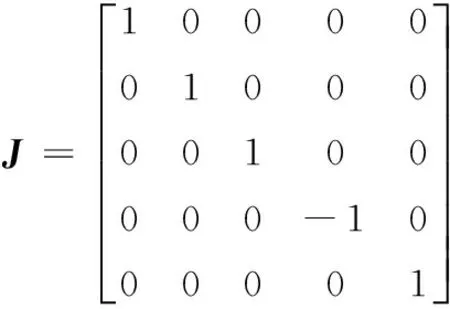
為了能更加直觀地反映所提出機構為完全解耦混聯(lián)機構,以及證明上述理論分析的正確性,對圖1所示的機構在ADAMS軟件中進行速度仿真。設機構并聯(lián)單元中的3個驅動副C11、C21、C31的輸入線位移方程分別為:q1=8×10-3sin2πt,q2=6×10-3sin4πt,q3=-4×10-3sin8πt(0≤t≤1 s)。
將上述輸入位移方程代入式(28)中,可得到3D打印機構的輸出速度方程,即v1=-1.6×10-2πcos2πt,v2=-2.4×10-2πcos4πt,v3=-3.2×10-2cos8πt(0≤t≤1 s),圖5給出了機構末端點的線速度仿真曲線,不難看出理論推導出的線速度v1、v2、v3與vx、vy、vz線速度仿真曲線相一致。
圖5 末端輸出線速度仿真曲線Fig.5 Simulation curves of linear velocity of the end-effector
設串聯(lián)單元的兩個驅動副的輸入角位移方程分別為θ2=0.4sin2πt,θ3=0.2sin2πt,分別將2個輸入方程代入式(29)可得出驅動副的輸入角速度方程ω2=-0.8πcos2πt,ω3=0.4πcos2πt(0≤t≤1 s)。角速度ωy、ωz仿真曲線如圖6所示,此結果與推導出的輸入角速度方程ω2、ω3結果相同。
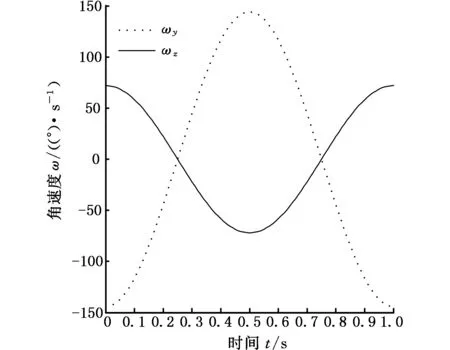
圖6 末端輸出角速度仿真曲線Fig.6 Simulation curves of angular velocity of the end-effector
上述理論分析以及運動仿真結果表明3CPaRR&RRo混聯(lián)機構能夠實現(xiàn)三維移動輸入與輸出的一一對應關系,同時該機構末端還可以繞Y軸、Z軸轉動,用以調節(jié)機構運動的姿態(tài),具有精度高、運動完全解耦的優(yōu)點,因此可作為多向3D打印機的執(zhí)行機構。
6 結論
(1) 3CPaRR&RRo混聯(lián)機構采用了3條完全相同支鏈正交布置的并聯(lián)單元串接一個兩自由度的轉動頭,基于旋量理論,分析了3CPaRR&RRo混聯(lián)機構末端輸出為三移兩轉五自由度的運動,通過ADAMS中Model Verify模塊得以驗證。
(2) 3CPaRR&RRo混聯(lián)機構的驅動簡單,并聯(lián)模塊采用三個移動副,串聯(lián)模塊采用兩個轉動副。基于D-H法求解了機構運動學方程,推導了機構位置和姿態(tài)的正解,對其求導得到了機構速度表達式。
(3) 利用運動影響系數(shù)求得3CPaRR&RRo混聯(lián)機構速度雅可比矩陣,理論驗證了機構的解耦性,并分析了機構在工作空間的奇異問題。最后通過對機構運動仿真,證明了理論分析的正確性。
[1] GIBSON I, ROSEN D W, STUCKER B. Additive Manufacturing Technologies [M]. New York: Springer, 2010:54-61.
[2] 中國機械工程學會. 3D打印,打印未來[M]. 北京:中國科學技術出版社,2013: 20-35. Chinese Mechanical Engineering Society. 3D Printing, print the future[M]. Beijing: China Science and Technology Press, 2013: 20-35.
[3] ONUH S O, HON K K B. Optimising Build Parameters for Improved Surface Finish in Stereo Lithography[J]. International Journal of Machine Tools & Manufacture, 1998, 38(4):329-342.
[4] JING S K, SONG G H, LIU J H, et al. A Review of Product Design for Additive Manufacturing[J]. Applied Mechanics & Materials, 2014, 635/637:97-100.
[5] PINKERTON A J, WANG W, LI L. Component Repair Using Laser Direct Metal Deposition[J]. Journal of Engineering Manufacture, 2008, 222(7):827-836.
[6] DUTTA B, PALANISWAMY S, CHOI J, et al. Additive Manufacturing by Direct Metal Deposition[J]. Advanced Materials & Processes, 2011, 169(5):33-36.
[7] CHEN Y, ZHOU C, LAO J. A Layerless Additive Manufacturing Process Based on CNC Accumulation[J]. Rapid Prototyping Journal, 2011, 17(3):218-227.
[8] LEE W C, WEI C C, CHUNG S C. Development of a Hybrid Rapid Prototyping System Using Low-cost Fused Deposition Modeling and Five-axis Machining[J]. Journal of Materials Processing Technology, 2014, 214(11): 2366-2374.
[9] CHEN Y,ZHOU C,LAO J. A Layer Less Additive Manufacturing Process Based on CNC Accumulation[J]. Rapid Prototyping Journal,2011,17(3): 218-227.
[10] SONG X,PAN Y,CHEN Y. Development of a Low-cost Parallel Kinematic Machine for Multidirectional Additive Manufacturing[J]. Journal of Manufacturing Science and Engineering,2015,137(2): 297-310.
[11] 曹毅, 秦友蕾, 陳海,等. 基于GF集理論的五自由度混聯(lián)機器人構型綜合[J]. 農(nóng)業(yè)機械學報, 2015, 46(11):392-398. CAO Yi, QIN Youlei, CHEN Hai, et al. Structural Synthesis of 5-DOF Hybrid Mechanisms Based onGFSet[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(11):392-398.
[12] 秦友蕾, 曹毅, 陳海, 等. 兩移動三轉動完全解耦混聯(lián)機器人機構型綜合[J]. 西安交通大學學報, 2016,50(1):92-99. QIN Youlei, CAO Yi, CHEN Hai, et al. Structural Synthesis of Fully-decoupled Two-translational and Three-rotational Hybrid Robotic Manipulators[J]. Journal of Xi’an Jiaotong University, 2016,50(1):92-99.
[13] HUANG Z, LIU J F, ZENG D X. A General Methodology for Mobility Analysis of Mechanisms Based on Constraint Screw Theory[J]. Science in China, 2009, 52(5):1337-1347.
[14] 趙鐵石, 黃真. 欠秩空間并聯(lián)機器人輸入選取的理論與應用[J]. 機械工程學報, 2000, 36(10):81-85. ZHAO Tieshi, HUANG Zhen. Theory and Application of Selecting Actuating Components of Spatial Parallel Mechanisms[J]. Chinese Journal of Mechanical Engineering, 2000, 36(10):81-85.
[15] 于靖軍, 劉辛軍, 丁希侖. 機器人機構學的數(shù)學基礎[M]. 北京:機械工業(yè)出版社, 2009:82-86. YU Jingjun, LIU Xinjun, DING Xilun. Mathematic Foundation of Mechanisms and Robotics[M]. Beijing: China Machine Press, 2009:82-86.
[16] 李菊,趙德安,沈惠平,等. 多噴槍協(xié)同式噴涂五軸混聯(lián)機器人設計[J]. 農(nóng)業(yè)機械學報,2012,43(4): 216-220. LI Ju, ZHAO De’an, SHEN Huiping et al. Design of 5-axes Hybrid Robot with Several Spray Guns for Collaborative Spraying[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(4):216-220.
(編輯 王艷麗)
Hybrid Kinematics Mechanisms and Its Kinematic Analysis Oriented to Multi 3D Printing
ZHOU Hui1, 2DING Rui1, 2QIN Youlei1, 2CAO Yi1, 2
1.School of Mechanical Engineering, Jiangnan University, Wuxi, Jiangsu, 214122 2.The Key Laboratory for Advanced Food Manufacturing Equipment Technology of Jiangsu Province,Jiangnan University, Wuxi, Jiangsu, 214122
In order to solve the bottleneck problems of multi 3D printing equipment, a fully-decoupled five degree of freedom (5-DOF) HKM was presented as the actuator of 3D printing. HKM consisted of 3-CPaRR parallel module and RRoserial module, and the parallel module consisted of three identical CPaRR limb chains, it might realize three-dimensional translations, the serial module RRowas used to adjust the print head posture, improve 3D printing process step phenomenon and interference problems. Screw theory was applied to analyze the kinematic characteristics of mechanisms and to calculate the degrees of freedom of 3CPaRR&RRowhich were verified via the ADAMS software. The kinematic matrix of the hybrid mechanisms was carried out by using the D-H convention. The expression of the forward kinematics was deduced to obtain the Jacobian matrix and velocity equations, and the analysis of singularity was carried out. Moreover, simulation model was built with ADAMS, the velocities of the end-effectors of mechanisms were drawn. Thus, the validity of the theoretical analyses was proved.
multi 3D printing; hybrid kinematics mechanism(HKM); fully decoupled; screw theory; kinematics
2016-04-19
國家自然科學基金資助項目(50905075);江蘇省六大人才高峰項目(ZBZZ-012);機械系統(tǒng)與振動國家重點實驗室開放課題資助項目(MSV201407)
TH112
10.3969/j.issn.1004-132X.2017.05.001
周 輝,女,1973年生。江南大學機械工程學院講師。主要研究方向為機器人技術。發(fā)表論文30余篇。丁 銳,男,1992年生。江南大學機械工程學院碩士研究生。秦友蕾,男,1991年生。江南大學機械工程學院碩士研究生。曹 毅(通信作者),男,1974年生。江南大學機械工程學院教授。E-mail:caoyi@jiangnan.edu.cn。