6000 m級探測型AUV優化設計與阻力分析
2017-03-14 08:00:20張洪彬徐會希王亞興
海洋技術學報 2017年1期
張洪彬,徐會希,陳 仲,王亞興,尹 遠
(中國科學院沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016)
6000 m級探測型AUV優化設計與阻力分析
張洪彬,徐會希,陳 仲,王亞興,尹 遠
(中國科學院沈陽自動化研究所 機器人學國家重點實驗室,遼寧 沈陽 110016)
使用ISIGHT集成EXCEL,ICEM,ANSYSFLUENT軟件,搭建封閉耦合優化仿真平臺。根據任務需求和布置需要得到設計變量、狀態變量和目標函數,采用多島遺傳算法,優化求解得到局部最優AUV設計結果。借助SOLIDWORKS設計得到全附體模型,使用ANSYSCFX分別在0°,±2°,±4°,±8°,±16°攻角的條件下,計算其阻力值,經過經驗公式對摩擦阻力的計算結果進行理論驗證,證明了計算結果的可靠性。為6 000m級探測型AUV的總體方案設計提供了線型參考和布局依據。
ISIGHT優化阻力分析;CFD仿真;ANSYSCFX
自主式水下機器人[1](AUV)的研究始于20世紀初期,作為人類在海洋中的大腦和肢體延伸,A UV的應用領域眾多[2]。按照目前的技術發展狀況[3],AUV的研究可主要細分為以下3個方向:軍用水下魚雷的探測搜索與危險排除,代表機器人為HUGIN(挪威KONSBERG)、BPAUV(美國BLUEFIN)和CETUS(美國MIT);深海礦產、生物資源勘測與海洋冰下探索,代表機器人為CARIBOU(美國MIT)、AUTOSUB(英國SOC)、潛龍一號(中國SIA)和潛龍二號(中國SIA);可對水下環境進行人為干預的作業型AUV,代表機器人為MIR-I&II(俄羅斯OCEANICS)、SAUVIM(美國HU)和蛟龍號(中國COMRA)。
根據上述AUV的總結概括,實用性已經成為AUV發展的重要驅動力,研發能夠解決當今時代難題的實用型水下機器人,已經成為業內學者和專家的共同心聲。針對如何更好地協助海洋搜救、沉船打撈和水下考古探測等實用性難題,本文依托重大研發項目,優化設計了6 000m級探測型AUV系統。通過優化設計和阻力分析,提出了最優艇型[4-6]和穩定翼型[7],設計得到全附體模型后,進行了不同攻角條件下的艇體阻力計算,通過理論計算方法驗證,證明計算結果的可靠性。
1 艇型優化
使用數字化、自動化的CAE軟件ISIGHT,將優化設計過程耦合成為一個系統框架,實現“分析—優化—模型修正—再分析、再優化”自動循環流程,獲取局部最優解。優化設計流程見圖1。

圖1 自循環優化設計框架
常見的回轉體線型有卡克斯型、格蘭維爾型、Myring型、水滴型等,本文使用Myring工程上應用十分廣泛的Myring型進行優化設計。Myring型回轉體艏、艉部型線方程為:


式中:a為艏段長度;b為中段長度;c為艉段長度;d為平行段直徑;x為長軸到坐標原點(艏部頂點)的距離;r為半徑;n為艏部飽滿度控制參數(數值越大越飽滿);θ為艉部飽滿度控制參數(數值越大越飽滿)。根據總體設計需要,中段設計長度為2.5 m,優化過程為調整a與n值,b與θ值得到最小直航阻力對應的艏、艉部型線。
本文選擇多島遺傳算法進行優化計算,與傳統的遺傳算法相比,該算法的局部尋優能力有了很大的提升。算法將大種群劃分為多個島(子群),在每個島內分別優化計算,再按比例將島內優化結果轉移到其他島內繼續優化,最終獲得局部最優解。算法的進化原理見圖2。其中,i代表多島遺傳優化進行到第i代,mi為遷移間隔,即每次遷移的代數,k是整數。
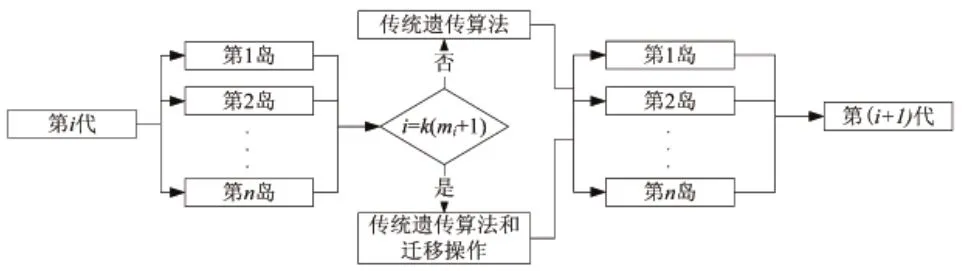
圖2 多島遺傳算法進化原理
對應優化結果如圖3~圖4所示。

圖3 優化前后艏段線型

圖4 優化前后艉段線型
2 鰭舵優化與布局
鰭舵設計選擇對稱翼型,充分考慮結構通用性與加工的便利性,選擇NACA00系列翼型。該系列線型的相對厚度越大,則可獲得更高的升力系數,且翼型相對厚度較小時,壓心基本一致,厚度較大時壓心趨于靠前。綜合考慮選擇NACA0015翼型作為鰭舵翼型。無因次型值點坐標如表1所示,圖5為無因次舵截面圖。

表1 NACA0015無因次型值點坐標
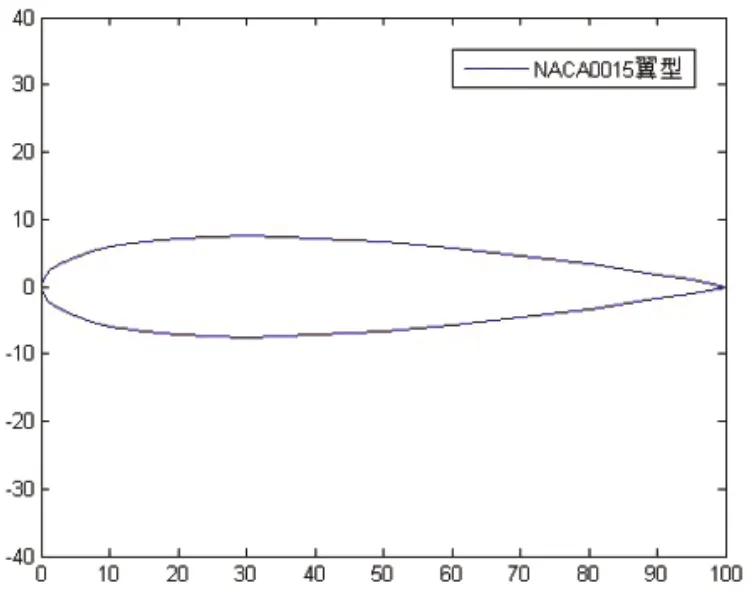
圖5 無因次舵截面圖
艉舵布局選擇X型舵差分控制,優化初值根據平衡條件,采用理論估計方法獲得。最終的設計原則是充分發揮和提高舵效。限于篇幅原因,本文只給出艉部鰭舵平面幾何優化布局結果(如圖6所示),以及艏部鰭舵平面幾何優化布局結果(如圖7所示)。
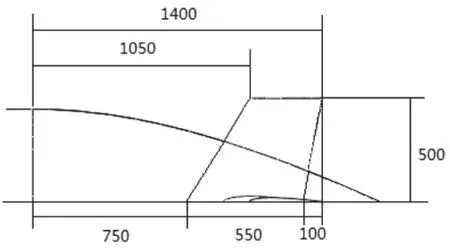
圖6 艉部鰭舵平面幾何優化布局結果

圖7 艏部鰭舵平面幾何優化布局結果
最終設計得到艇體和全附體艇型,分別如圖8和圖9所示。全附體艇體參數如表2所示。
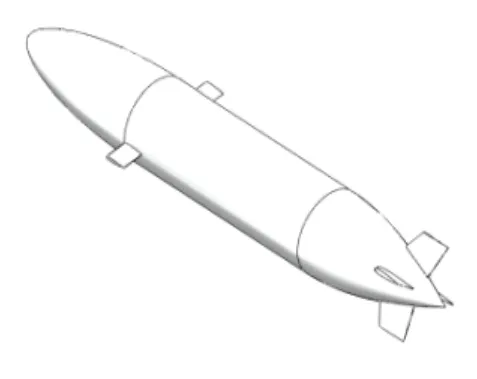
圖8 優化結果圖
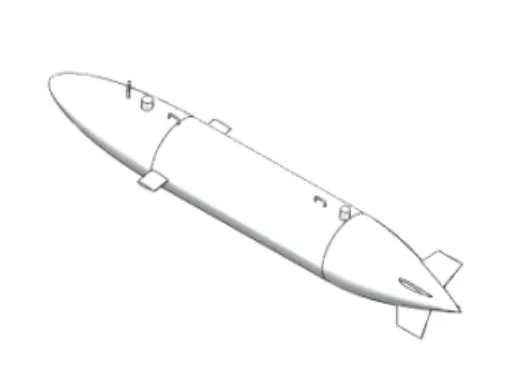
圖9 全附體艇型
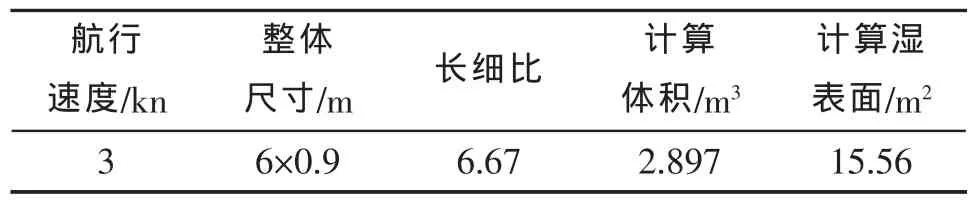
表2 艇體系統參數
3 阻力計算
計算流體力學[8-9](CFD)的分析方法一共有3種:實驗分析、理論分析[5]、CFD模擬。3種方法的特點,可以通過表3進行詳細比較。
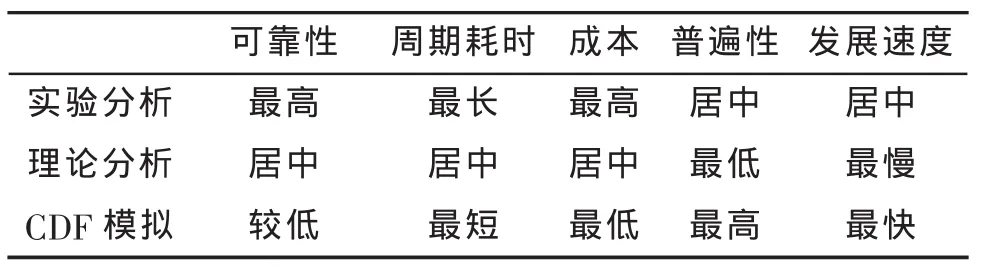
表3 流體力學的3類計算方法比較
綜合分析可以得出,3類分析方法各有優劣,但是可以看出CFD仿真模擬的優勢最為突出,所以本文采取ANSYSCFX方法計算AUV的摩擦阻力值,并采用經驗公式對摩擦阻力計算結果進行驗證。計算數學模型采用工程上被廣泛應用的雷諾時均算法和兩方程的κ-ε模型,其中κ為湍流動能,ε為湍流耗散率。
雷諾時均RANS方程組為:

式中:ρ為流體密度;u',T'分別為湍流脈動速度和脈動溫度;ui,T分別為湍流平均速度和平均溫度;Q為單位時間內外部加給單位流體的熱能。
兩方程的κ-ε湍流模型為:

計算模型劃分單元數1 936 778,節點數391 428,網格模型如圖10所示。網格質量檢查結果如圖11所示。
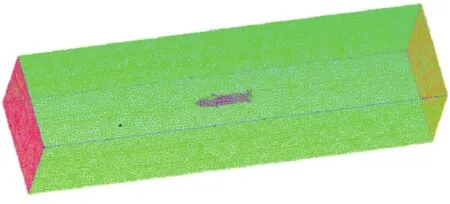
圖10 網格模型
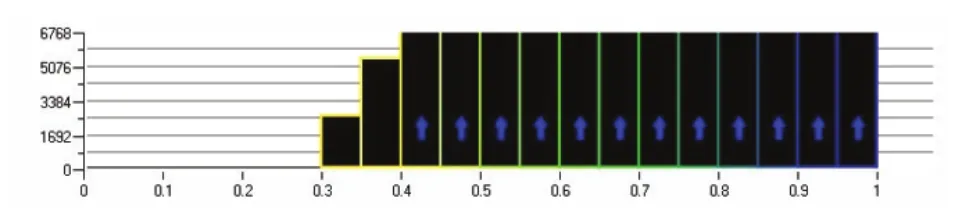
圖11 網格質量檢查結果
艇體表面壓強分布云圖如圖12所示。

圖12 表面壓強分布云圖
由于在不同攻角計算條件下,Y,Z方向的阻力分力遠遠小于軸向阻力,所以可只關心X方向的阻力計算結果,摩擦阻力計算結果如表4所示。
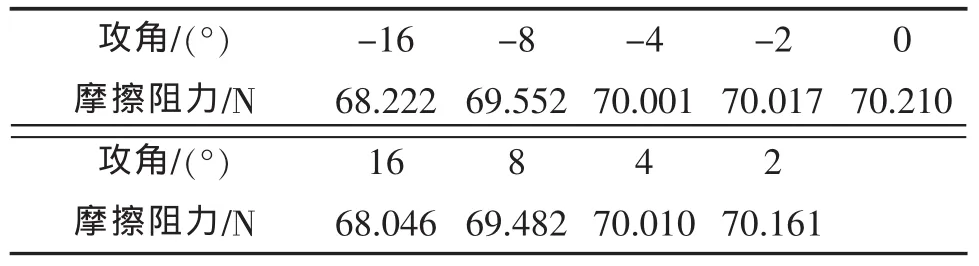
表4 X方向摩擦阻力計算結果
阻力系數定義為單位濕表面積,單位流體動壓條件下的阻力。計算公式如式(5)所示。

式中:Rt為阻力計算值;ρ為流體密度;V為航行速度;S為濕表面積。不同攻角條件下的阻力系數計算結果如表5所示,阻力系數隨攻角變化曲線如圖13所示。

表5 X方向摩擦阻力系數計算結果
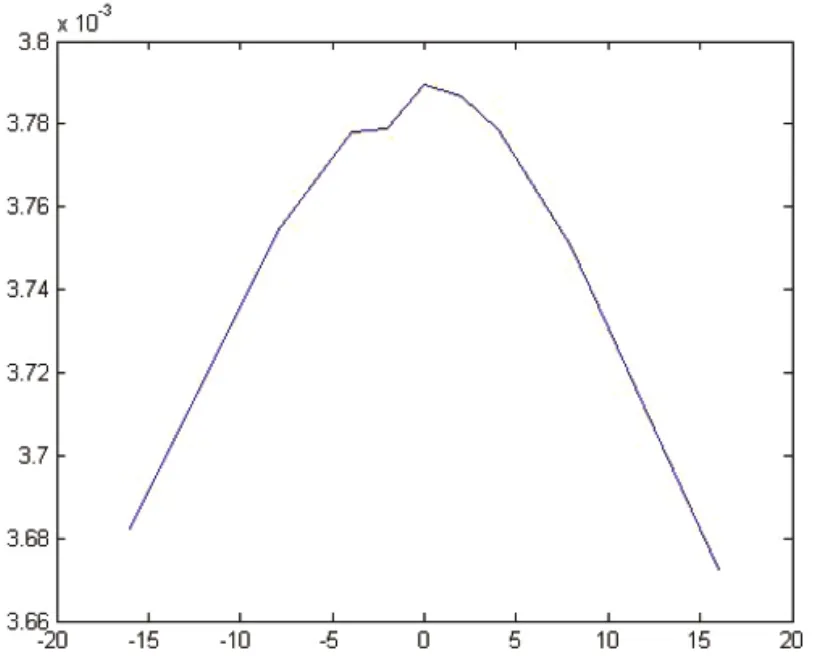
圖13 摩擦阻力系數隨攻角變化
有攻角時的阻力系數值全部小于0°攻角時的結果,且攻角越大阻力系數越小,計算結果滿足經驗規律。
4 結果驗證
艇體阻力主要包括摩擦阻力和粘壓阻力。摩擦阻力的成因為流體存在粘性,在艇體的四周形成邊界層而產生阻力。粘壓阻力因為艇體的曲率變化
后,在艇體各個部位的壓力產生壓差而產生阻力。艇體總阻力計算公式為:

式中:Rf為摩擦阻力;RV為粘壓阻力。
本文只取摩擦阻力為研究對象,所以只考慮摩擦阻力的計算結果。摩擦阻力計算公式為:

式中:ρ為海水密度;本文取4°海水密度,ρ= 1 027.77 kg/m3;V為艇體航行速度;v為運動粘性系數,v=1.6105e-6m2/s;S為艇體濕表面積;Cf為摩擦阻力系數;ΔCf為粗糙度增量系數,取值為0.000 4,此系數與雷諾數無關。工程上摩擦阻力計算結果可以取代CFD計算結果,所以本文使用理論計算方法對CFD計算結果進行驗證。
由上述公式計算得到摩擦阻力理論計算公式為:
計算結果為70.607 N,CFX計算結果與理論值相比,相對誤差為0.562%。證明了計算結果的可靠性。
5 結論
本文依托重大研發項目,研究了6 000 m級探測型AUV的最優艇型及最優穩定翼型。通過對全附體模型的阻力評估,經過經驗公式驗證,證明了計算結果的可靠性。本文的研究結果為該項目的總體方案設計提供了線型參考和布局依據。
[1]蔣新松,封錫盛,王棣棠.水下機器人[M].遼寧科技大學出版社,2000.
[2]任福君,張嵐,王殿君,等.水下機器人的發展現狀[J].佳木斯大學學報,2002,18(4):317-320.
[3]馮正平.國外自治水下機器人發展現狀綜述[J].魚雷技術,2005,13(1):5-9.
[4]MYRINGD F.A TheoreticalStudy ofBody Drag in SubcriticalAxisymmetric Flow[J].AeronauticalQuarterly,1976,27(3):186-194.
[5]龐勇杰,王亞興,楊卓懿,等.Myring型回轉體直航阻力計算及艇型優化[J].哈爾濱工程大學學報,2014,35(9):1093-1098.
[6]杜月中,閔健,郭字洲.流線型回轉體外形設計綜述與線型擬合[J].聲學技術,2004,23(2):93-101.
[7]武建國,張宏偉.小型自主水下航行器尾舵設計與研究[J].海洋技術,2009,28(3):5-8.
[8]王福軍.計算流體動力學分析[M].北京:清華大學出版社,2004:202-204.
[9]PozrikidisC.Fluid Dynamics:Theory,Computation,and NumericalSimulation[M].German:Springer,2009.
Optimal Design and Drag Analysis for a Type of 6000m Detective AUV
ZHANG Hong-bin,XU Hui-xi,CHEN Zhong,WANG Ya-xing,YIN Yuan
State Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,Liaoning Province,China
By using the ISIGHT,the close coupling optimized simulation platform is set up with the softwares of EXCEL,ICEM and ANSYSFLUENT.According to themission requirements and layout,it needs to obtain design variables,state variables and objective function.With the help ofmulti-island genetic algorithm,the design of a local optimal AUV is completed.With the SOLIDWORKS software,the appendage model is designed,and then the drag values can be calculated with ANSYSCFX at the attack angle of 0°,±2°,±4°,±8°,±16°,respectively. In order to prove the reliability of the calculation results,the empirical formula is studied to verify the calculation results of frictional resistances.Therefore,the theoretical reference and practical basis are provided for the overall design scheme of an AUV used for 6000m depth detection.
ISIGHT optimization;drag analysis;CFD simulation;ANSYSCFX
P715.5;TB126
A
1003-2029(2017)01-0047-05
10.3969/j.issn.1003-2029.2017.01.009
2016-08-15
國家高技術研究發展計劃(863計劃)資助項目(2011AA09A102)
張洪彬(1988-),男,碩士,研究實習員,水下機器人總體設計。E-mail:zhanghongbin@sia.cn
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16