單點系留式垂直剖面測量系統水動力仿真
2017-03-14 08:00:28丁晶磊張文良
海洋技術學報 2017年1期
關鍵詞:系統
丁晶磊,梁 捷,張文良,張 毅
(國家海洋技術中心,天津 300112)
單點系留式垂直剖面測量系統水動力仿真
丁晶磊,梁 捷,張文良,張 毅
(國家海洋技術中心,天津 300112)
單點系留式垂直剖面測量系統通過放置在主潛標上的絞車來控制升降平臺上下運動,從而實現剖面的測量和數據傳輸。為輔助系統設計,文中介紹了通過OrcaFlex軟件對該系統的水動力建模與仿真,并算出給定海況下幾個重要部件的位置姿態和受力情況。結果表明:根據各節點拉力計算結果,選用合適的結構來滿足各工況下的強度要求;倉體耐壓和其它性能應滿足主潛標最大下潛深度;升降的系纜所纏長度應滿足平臺運動過程釋放的最大值。在實際配置系統時可以參考這幾個重要數據輔助設計。
水下絞車;垂直剖面測量系統;升降平臺;O rcaFlex
單點系留式垂直剖面測量系統是一種以系留式潛標為基礎,集成具有升降剖面測量平臺的海洋觀測系統。通過放置在系泊纜上不同水深的溫、鹽、深、海流剖面等多種傳感器,可以實現對海洋環境的定點、長期、多參數監測。通過升降平臺的上下運動和其上搭載的海流計、CTD、北斗通訊機等,實現對水下剖面的參數測量和實時的數據傳輸,具有連續、隱蔽且實時等特點,是海洋觀測的重要補充和發展,是先進的深遠海海洋調查裝備。
水下絞車是單點系留式垂直剖面測量系統中的重要部件,對升降平臺能否順利露出水面、能否保證其穩定姿態運動都起著決定性的作用。電機、釋纜繩和升降平臺相互影響、相互耦合,使得升降平臺的動態響應和纜繩姿態求解成為復雜的力學問題。目前國內外對于水下纜繩力學分析的研究開展時間已久,對水動力求解也有很多有效的模型,如集中質量法[1-2]、有限差分法[3]、直接積分法[4],然而多是一維或者二維的討論,沒有考慮到三維海洋環境對纜繩的影響,也沒有考慮到纜繩本身的運動。
文中將結合給定海況和已有的技術資料,選取4 000 m的布放海深和100~300 m剖面測量海深,對研制的單點系留式垂直剖面測量系統進行姿態求解和力學計算,對幾個重要部件的姿態和幾個重要節點的力學強度進行數值計算,達到輔助設計、完善結構的目的。
1 系統實際模型的介紹
單點系留式垂直剖面測量系統由主潛標、水下絞車、升降平臺等主要部件組成,系泊纜上依次懸掛著海流計、CTD、玻璃浮球等部件,系統配置如圖1所示:

圖1 實際模型
系統的工作方式是通過放置在主潛標上的水下絞車來控制升降平臺上下運動。升降平臺上搭載了溫、鹽、深、海流等多種傳感器及通訊機,從而實現剖面測量和數據傳輸。該系統可以定點長期且連續地對海洋環境進行多參數剖面觀測[5],通過改變絞車電機轉速可實現不同的空間分辨率。與目前最普遍的錨系潛標的系統相比,具有更強的實時性和更高的靈活性。系統的運動方式如圖2所示:

圖2 系統工作方式圖
圖中:狀態a表示升降平臺靜止在主潛標上;狀態b表示升降平臺在上升/下降;狀態c表示升降平臺浮在水面。結點N1為系泊纜下結點,表示系泊纜與重力錨連接點;結點N2為系泊纜上結點,表示系泊纜與主潛標連接點;結點N3為升降繩上結點,表示升降繩與升降平臺連接點。
2 水動力仿真
深海實時潛標觀測系統的設計需要通過水動力仿真來輔助結構設計。現在海洋工程領域最常用的水動力軟件包括AQWA、SESAM、Hydrostar等,多用于浮式或者半潛式的數值計算,并不配有升降運動模型。而OrcaFlex軟件的功能強大,配有絞車模型和完整的潛式平臺水動力分析功能。本文采用OrcaFlex進行水動力數值計算。
Orcaflex進行系泊分析采用的是耦合分析方法。它考慮了流體的水動力載荷和慣性力,并將系泊系統和潛式平臺的動態響應聯合求解[6]。OrcaFlex的水動力性能研究主要基于Morison方法[7],Morison公式如下:

式中:Fw表示物體所受的流體力;Δ表示物體排水質量;?w表示流體絕對加速度;Ca表示流體附加質量;?r表示流體相對物體的加速度;ρ表示流體密度;Cd表示物體的流體阻力系數;A表示迎流面積;Vr表示流體相對物體的速度。
式1的后半部分是流體阻力,前半部分表示物體的慣性力,其中包括了由非擾動波產生的不穩定壓力場力Froude-Krylov力和附加質量力。
水中質點的動力學方程如下[8]:

式中:M[p,a]表示質點慣性力;C[p,v]表示質點所受的阻尼力;K[p]表示質點所受的剛性載荷;F[p, v,t]表示環境載荷;p,v,a表示位置、速度和加速度;t表示仿真時間。
對于水中質點和繩子節點通過式(2)可以輸入微元質量矩陣便可以得到微元的初始加速度向量,再使用歐拉向前差分得到各個時刻的位置、速度。
2.1 系統的建模
深海實時剖面測量系統采用單點懸鏈式的結構。系泊纜和升降繩采用OrcaFlex中的line模型,錨鏈凈浮力3.8 kg/m,Kevlar繩凈浮力0.021 kg/m。海流計和浮球可以設置成line中的固件,主潛標和升降平臺采用軟件中的6D Buoy模型,水下絞車采用winch模型。系統尺寸和水中重量(方向豎直向下)參數如表1,再設置錨點為坐標原點,輸入包括水體密度、水體溫度等環境參數和仿真步長等仿真條件之后便可以開始數值計算。

表1 系統參數設置
2.2 工況的設定
系統進行動態分析之前,需要計算系統的靜態平衡,以此作為動態分析的初始條件。故設定工況1為計算初始靜態。考慮實際工況,最后設定了3種工況,如表2:

表2 工況的設定
設置工作海況和極限海況部分參數如表3和圖3所示:

表3 波浪參數

圖3 海流參數
2.3 計算結果
上述工況下,對于位置姿態,應主要關注以下兩個值來表征系統的特征:
(1)電機升降繩子的長度;
(2)整個運動過程中主潛標的升沉和水平偏移。對于節點力學特征主要關注以下兩個點:(1)升降繩與升降平臺聯接節點的受力;(2)系泊纜的上下連接點的載荷。
2.3.1 工況1計算結果 工況1為靜態初始條件,部分結果如表4。

表4 靜態初始條件
2.3.2 工況2和工況3計算結果
(1)升降平臺的收放
系統的運動過程分為升降平臺從主潛標處上浮—海面停留—下降至主潛標,對應于電機的正轉-停止-反轉,當升降平臺到達海面之后讓電機停止運動,設定停留時間為200 s,數據完成發送后電機反轉使升降平臺回到主潛標上方。升降繩的長度變化如圖4所示:
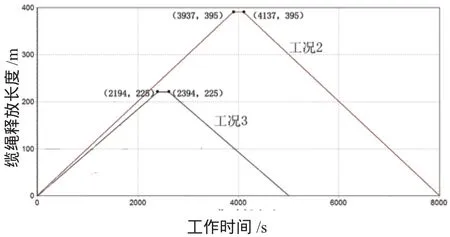
圖4 纜繩長度變化
圖4表明,升降平臺在工作海況要比極限海況先到達水面。在極限海況下電機需要轉動3 937 s并釋放395 m的繩子,工作海況下電機需要轉動2 194 s并釋放225m的繩子,升降平臺才能露出水面。這說明纏繞在絞車上的升降繩的長度也不應小于395 m。
(2)主潛標位置
主潛標位置變化如圖5及圖6所示:

圖6 主潛標水平位置變化
由圖5和圖6計算結果可以得知,工況2下主潛標的初始位置為水下304 m,相對錨點水平偏移了1 260m,運動到3 805 s時主潛標位置開始發生快速下降,最深下沉到316m,運動結束時主潛標回到水下305 m,水平1 264 m。工況3下主潛標的初始位置為水下208 m,水平偏移930 m,運動到2 104 s時快速下降,下沉到210 m,并最終回到水下209 m,水平偏移933 m,位置變化相對工況2而言不大。工況2和3下主潛標都是在升降平臺即將到達水面時發生位置顯著偏降,對應升降平臺的水深為5m和0.9m,這個值與所設置的波浪參數有關。從以上可知主潛標最多下沉到316m,則主潛標上主控倉體需至少承受316m的水壓。
(3)纜索受力
由于升降平臺和主潛標是系統最重要的兩個部件,因此系泊纜與重力錨和主潛標連接處及升降繩與升降平臺連接處的纜索受力為關切點。系泊纜上下結點受力如圖7(a)和7(b),升降繩上端受力如圖7(c)。

圖7 纜索結點受力
圖7看出工況2的系統載荷在2 716 s時開始出現抖動,對應升降平臺在水深72 m的位置,載荷浮動主要由波浪載荷縱向傳播造成,說明升降平臺受力需開始考慮波浪載荷的影響。工況3下,載荷從1 881 s開始抖動,此時升降平臺在水深26m,直到2 194 s到達水面波動達到最大。受力最大值及時間點如表5所示。

表5 結點受力最大值
對仿真期間各結點的受力大小進行次數統計,看受力大小主要分布的區間,得到圖8:
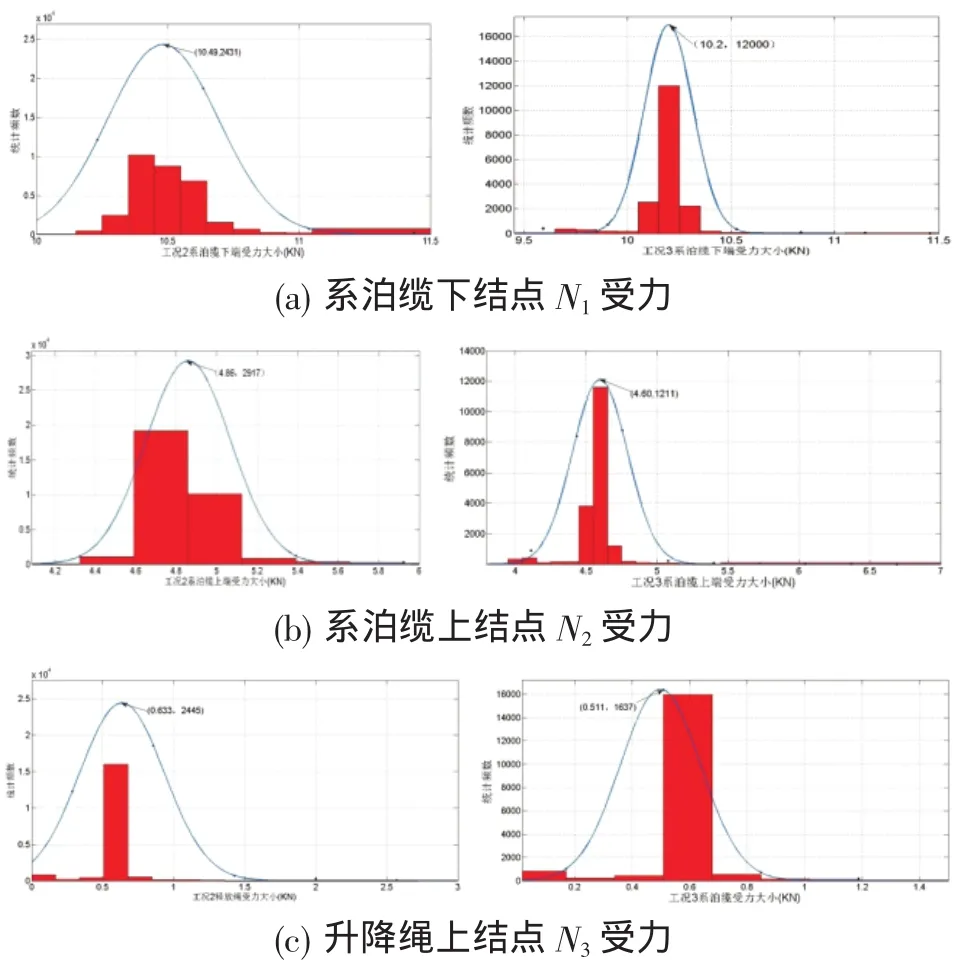
圖8 纜索結點受力統計圖
將受力大小按照大小排列,統計幾個區間內力的值在仿真階段出現的次數,由圖8可以統計得到表6:

表6 結點受力頻數統計
表5列出重要結點的沖擊載荷最大值,是結構設計的重要參考指標。圖8和表6是對受力頻數的統計,用于輔助驗證部件疲勞。受海流和波浪的影響,工況2和3的值差別很大。系統受力最大值在系泊纜下結點,沖擊載荷可達到14.7 kN,作用時間為1 s,載荷主要出現在10.3 kN附近,載荷值主要用于重力錨和錨鏈的選取。
受波浪的影響,升降平臺浮在水面時升降繩上結點受力波動很大,平臺將產生很大震蕩。尤其當工況2下平臺接近水面時,結點力大于平臺的浮力,平臺露出水面很難保證,證明極限海況下升降平臺不適合釋放。
3 結論
綜合分析上述結果可以得到以下結論:
(1)系泊纜的下結點沖擊載荷最大可達到14.7 kN,則重力錨配重需與之匹配,同時重力錨其上的錨鏈可適當增大強度。
(2)主潛標最多下沉到316 m海深,主潛標上電機倉、電池倉等重要倉體的耐壓應至少保證滿足相應深度的耐壓。
(3)電機釋放纜繩過程中升降平臺受水流影響而水平偏移,偏移量過大則升降繩的長度也會增大,纜繩釋放最多達到395m,故纏繞在絞車上的纜繩長度不應小于395m。
(4)系泊纜整體采用了新型的kevlar繩,對于上下結點的載荷都可以滿足要求,可以在滿足強度的同時減小纜繩的直徑,以此來減少主潛標的偏降[9]。
[1]Walton TS,Polacheeh H.Calculation ofTransientMotion ofSubmerged Cables[J].MathematicsofComputation,1960,14:27-46.
[2]Huang S.Dynamics Analysisof Three-DimensionalMarine Cables[J].Ocean Engineering,1994,21(6):587-605.
[3]Ablow CM,Schechter S.NumericalSimulation ofUndersea Cable Dynamics[J].Ocean Engineeng,1983,10(6):443-457.
[4]DEZoysa A PK.Steady-State AnalysisofUndersea Cables[J].Ocean Engineering,1978,5:209-223.
[5]沈琪,徐召利.海洋工程中單點系泊系統的應用探討[J].船舶標準化與質量,2015,6:5-8.
[6]Newmann JN.周樹國,譯.船舶流體動力學[M].北京:人民交通出版社,1986.
[7]Morison JR,O'Brien M D,Johnson JW,etal.The Force Exerted by SurfaceWaveson Piles.Petrol TransAIME.189,1950.
[8]Chung J,HulbertGM,A Time Integration Algorithm for StructuralDynamicswith Improved NumericalDissipation:TheGeneralized-α Method[J].ASME JournalofApplied Mechanics,1993,60:371-375.
[9]李飛權,張選民,張鵬,等.海洋潛標系統的設計和應用[J].海洋技術,2004,23(1):17-21.
Hydrodynamic Simulation of the Single Moored Vertical Profile Measuring System
DING Jing-lei,LIANG Jie,ZHANGWen-liang,ZHANG Yi
National Ocean Technology Center,Tianjin 300112,China
The singlemoored vertical profilemeasuring system controls the platform tomove up and down through the winch placed on the submersible buoy,so as to achieve vertical profilemeasurement and data transmission to the satellite.In order to assist the design of the system,this paper focuses on the hydrodynamic modeling and simulation through the OrcaFlex software,and derives some important results under given sea conditions.The results show that optimal structure should be designed to meet the strength requirement under various working conditions,themajor submersible buoy will occur depth variation during complete work time,the cabin should be pressure-resistant to meet maximum diving depth,and the length of the lifting cable should suitable for the maximum length released during the motion process.All these important data can assist the design of whole system's structure.
underwaterwinch;vertical profilemeasuring system;lifting platform;OrcaFlex
P715
A
1003-2029(2017)01-0097-06
10.3969/j.issn.1003-2029.2017.01.018
2016-04-25
海洋公益性行業科研專項資助項目(201405006-4)
丁晶磊(1991-),男,碩士,主要研究方向為水下觀測控制系統研制。E-mail:djl1938@163.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32