基于凝膠材料的分布式柔性觸覺感知測試電路
2017-03-15 17:46:13武尚卿苑婷婷劉可何斌
電子技術與軟件工程 2017年2期
武尚卿+苑婷婷+劉可+何斌


摘 要 本文設計并研制了一種新型柔性分布式觸覺感知系統。其基于離子水凝膠為基本材料,建立觸覺傳感器模型的理論與機理,設計并制作的感知層與定位層,分別可以感知力的大小與方向,由此實現柔性皮膚觸覺感知。這種感知系統可用作構建軟體機器人,對復雜環境下具有較高的適應性,在救援、軍事行動、生物、醫療研究等領域具極強的應用價值。
【關鍵詞】觸覺感知 柔性 離子凝膠 軟體機器人
1 引言
隨著微機電技術特別是微型仿生機器人技術的發展,傳統的氣缸、電機等剛性驅動器已經不能滿足仿生機器人系統高靈活性、高冗余度和高負載/體重比的應用需求,學者們研制出了多種新型活性軟質材料,并對其在柔性驅動器方面的應用進行了一系列探索。其難點在于人類觸覺感知過程很難被模仿并且制作材料缺乏并且制作工藝有限。
2 凝膠作為感知模型的制備
2.1 感知層制備
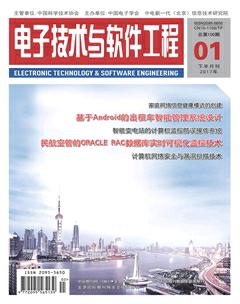
感知層分為三部分材料,其中離子凝膠層位于中間,活性炭層覆蓋離子凝膠兩側,激流體鋁箔覆蓋最外層,其中離子凝膠仿生人體皮膚,同時為感知凝膠提供離子電荷,活性炭層用于物理吸附離子液體中的陰陽離子,鋁箔導出電荷,同時表面抗折疊按壓。如圖1所示。
底層離子膠體層文選用的離子液體為1-丁基-3- 甲基咪唑四氟硼酸鹽,底層離子凝膠載體材料為N,N-二甲基丙烯酰胺。化學性質比較活潑,因而易于與各種單體發生共聚或均聚反應。如圖2所示。
碳極與炭黑是制備電級的材料,其作用在于活性炭是具有極大比表面積及很強吸附,炭黑材料牢固地吸附著一些氣態碳氫化合物和其他物質,二者混合物活性物質吸附膠體的離子,因而使膠體形成電壓差,可吸附離子電荷,通過60%的分散液聚四氟乙烯(PTFE)形成吸附碳電極。
其制作過程為按比例加取8質量的的活性炭與1質量的炭黑,攪拌均勻,與1質量的PTFE分散液相互混合,形成混合固液,同時加入20質量ml的水與20質量的乙醇,混合攪拌至凝固狀態,用玻璃棒反復搟壓,形成薄餅狀態,厚度約為0.5mm,同時放入120度烘箱中,設置烘烤12小時,制成碳極活性物質層。
集流體可以把碳極材料所吸附的電子導出,并傳輸至外圍電路。裁切集流體金屬鋁箔與碳極板相同大小兩片,同時與碳極活性物質粘連后貼在離子膠體層的兩側制備成可用的離子凝膠感知層。在集流體外圍接引導電刷,感知層膠體制備完成。如圖4所示。
2.2 定位層制備
定位層由單層離子凝膠構成,由一層可以導電離子凝膠構成,其優點在于低電壓條件下,即可完成定位感知功能。
此種膠體主要由丙烯酰胺與氯化鋰制成導電膠。丙烯酰胺通常為無色透明片狀晶體,分子量其分子結構示意圖如下,易溶于水,在酸堿環境中可水解成丙烯酸。LIcl為白色立方結晶或粉末,在基底層提供導電離子。
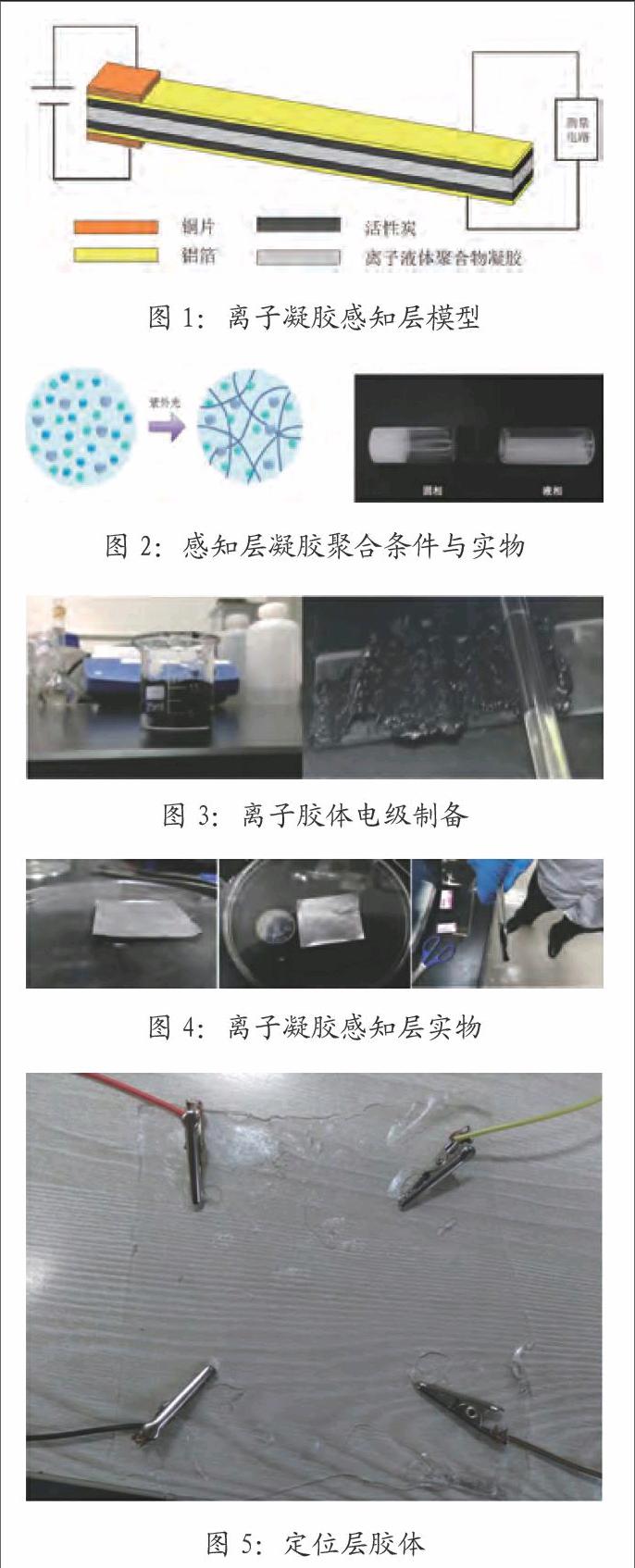
取14wt%的丙烯酰胺單體溶于水,加入交聯劑N,N—亞甲基雙丙烯酰胺(MBAA),熱引發劑(過硫酸鉀,APS)和催化劑(N,N,N′,N′四甲基乙二胺,TEMED),分別以摩爾比0.028mol%,0.031mol%和0.152mol%,溶解于丙烯酰胺溶液中,形成凝膠混合液,取2mol/L的氯化鋰溶液份,根據凝膠多少調整用量,混合于丙烯酰胺混合液中,攪拌均勻后,置于長100mm,寬100mm的封閉容器內,其中膠體內四個定點是為膠體定位系統預留空間,50℃靜置3個小時候即可成膠。如圖5所示。
3 實驗電路
3.1 感知層電路
感知層導電可以歸納為離子電流、位移電流、電子電流的綜合作用,等效為電容與電阻路混連,其可以等效為RC等效電路模型,當按壓力使得感知層發生形變,電容也隨即發生改變,由此可以按照測量電容變化,擬合得到力的大小變化。如圖6所示。
其中Re1,Re2表示上下兩極板電阻,R1表示驅動器活性炭層與離子液體聚合物凝膠層的直流等效總電阻,R2表示表示驅動器動態等效電阻,C表示表示驅動器電容。選用振蕩法測電容的充放電時間,硬件選型555振蕩發生器,如圖7所示。
通過555多諧振蕩器與外部電路與待測感知層電容相連,產生定時中斷被MCU即51單片機接受,此時該數據產生串口通訊由計算機接受,完成數據讀取。
感知層電路選用如圖8電路設計。
其計算原理在于
tpl=R2CxIn2
tph=(R1+R2)CxIn2
可推知
Cx=1.44/(R1+2R2)f
其中tpl555振蕩器低電平振蕩時間,tph為其高電平振蕩時間,R1、R2為并聯在555兩側的電阻,Cx為待測感知層電容值
由555定時器與外部元件R1、R2與待測電容構成多諧振蕩器,觸發其引腳tri與thr值,這時電路沒有穩態,電路僅通過R1、R2向待測電容Cx充電, 同時Cx接地進行放電,從而使電路產生振蕩。根據充放電時間可以算出待測電容值。
3.2 定位層電路
定位層感知功能是通過在固定設置在對角線上等位點的四電極,此四電極并聯接入同一電流源,初始值為等電位電路,當手指按壓觸碰時,形成完整回路,通過定義四個點坐標為(0 0)(0 1)(1 0)(1 1),當觸摸不同位置時,四支路電流不同,按電流比例求取該定點位置。如圖9所示。
定位層膠體中離子電阻較大,各支路,電路中此時需搭建極微弱電流放大器電路,主要芯片用OPA129芯片,偏置電流低,放大器輸入電容小,噪聲較小,適合搭載微弱信號放大器。如圖10所示。
定位層設計電路圖如圖11所示。
整個電路放大倍數由opa129與輸入端并聯電阻有關,Vout=10|R|·Iin,通過MCU讀取opa129輸出電壓,可知其流經該支路的輸入電流。
括感知力層與定位層上下結構連接,中間通過VHB膠帶固定,有設計的電路部分可以感知力大小與力的方位。由此完成觸覺感知測試。
4 總結
隨著材料、化學等學科的快速發展,針對微型仿生機器人系統的應用需求,學者們研制出了多種新型活性軟質材料,并對其在柔性驅動器方面的應用進行了一系列探索。本文針對柔性材料的特點,設計了分布式柔性觸覺感知系統,可感知力的大小與力的位置。在科學與工程領域具有實用意義,非常適合用作仿生柔性體機器人感知功能實現。
參考文獻
[1]張躍征.N_N_二甲基丙烯酰胺合成工藝研究[D].天津大學,2007.
[2]Chong-Chan Kim ionic touch panel [J].SCIENCE[J].12 AUGUST 2016 VOL 353 ISSUE 6300.
[3]Xinhua Liu,Tough Nanocomposite Ionogel-based Actuator Exhibits Robust Performance,SCIENTIFIC REPORTS[J],4:6673 DOI:10.1038
[4]李嚴松.PMMA+ LiClO4 有機薄膜的離子導電性能[J].太陽能學報,2000 vol.21,No.2:181-185.
[5]戴宇.用于人工假肢的分布式柔性電容觸覺傳感器的設計與制造[D].浙江大學,2013.
作者簡介
武尚卿(1991-),男,河南省安陽市人。碩士學歷。同濟大學電信學院。軟體機器人。
作者單位
同濟大學電子與信息工程學院 上海市 201800