智能機器人控制HIFU的插補算法研究
2017-03-17 00:14:25陳鋼藺靜茹穆衛(wèi)鋒譚嘉文
電子技術(shù)與軟件工程 2016年16期
陳鋼++藺靜茹++穆衛(wèi)鋒++譚嘉文
摘 要
隨著現(xiàn)代智能科學(xué)技術(shù)的發(fā)展,現(xiàn)代智能機器人的設(shè)計更加趨向現(xiàn)代化,高強度聚焦超聲串并聯(lián)機器人具有的獨特結(jié)構(gòu)特點,采用的HIFU插算法及補算法相結(jié)合,從而滿足智能機器人的電機軸動態(tài)性能條件。本文主要分析智能機器人的結(jié)構(gòu),并分析HIFU的插補算法。
【關(guān)鍵詞】智能機器人 HIFU 插補算法控制
智能機器人是通過串聯(lián)結(jié)構(gòu)和并聯(lián)結(jié)構(gòu)的相互結(jié)合而形成的智能化程序,通過插補算法和傳統(tǒng)的運算方式,來控制機器人的行為規(guī)范。通過插補算法的方式相對于傳統(tǒng)的算法來說,增加了并聯(lián)部分的在線反解計算,相應(yīng)的對其串聯(lián)機構(gòu)進行協(xié)調(diào)運動,同時能夠加強非線性的精度變化測算。
1 智能機器人的基本運算結(jié)構(gòu)
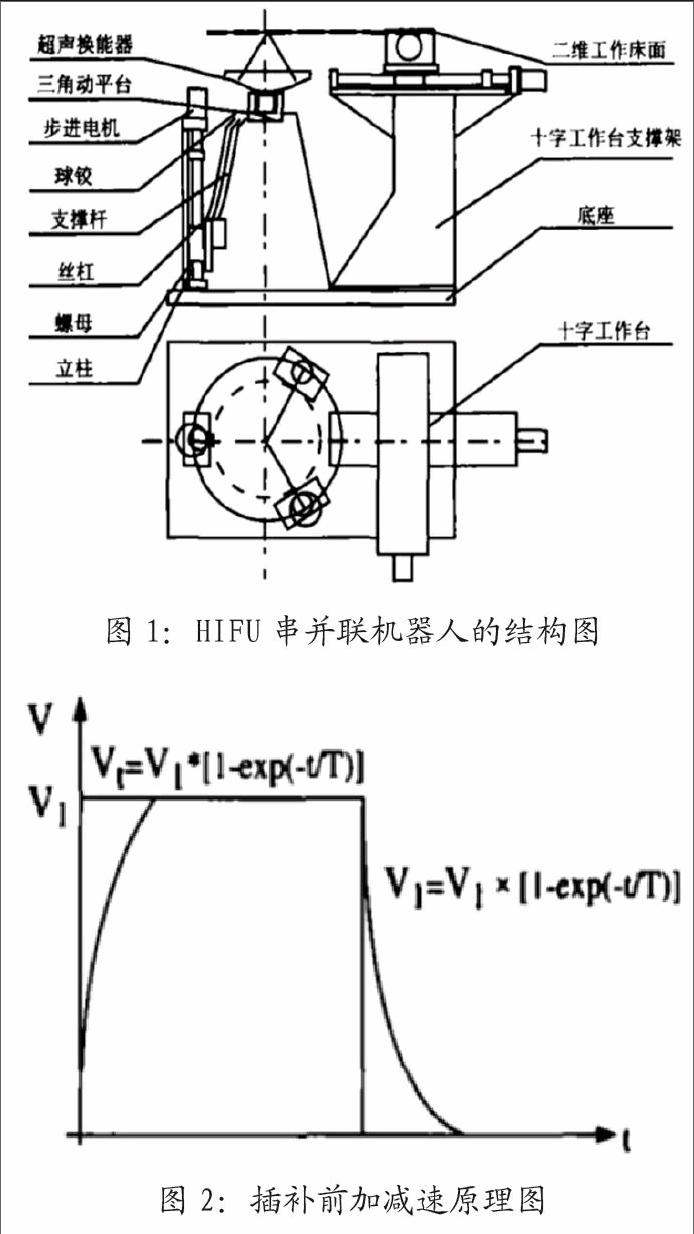
根據(jù)圖1來看,HIFU控制智能機器人的基本結(jié)構(gòu)分為兩個部分,上半部分主要是工作平臺,通過安裝底座的十字工作臺支撐架來固定。在由步進電機和絲杠螺母共同組成的移動裝置,來帶動工作床面的移動,同時還能夠定位病灶。而下半部分則是由動平臺、超聲換能器以及支撐桿等幾個祖墳組成,通過支撐桿將三個球面連接起來,同樣的支持干長度,一端連接銷軸,一端連接滑臺,從而組成三個轉(zhuǎn)東副。在三個支撐桿中,銷軸都是垂直于支撐桿的。
在智能機器人的底座上,同樣有三根立柱,通過立柱將移動副進行固定安裝,絲桿的軸線方向垂直。這樣的機器人結(jié)構(gòu)空間較小,擺動的角度小于20度,在十字工作臺上,x軸和y軸的行程都相對較小,其靜平臺外接圓的半徑長度不超過162mm,定桿長度不超過300mm,其中HIFU的中心垂直高度在205mm左右。
2 智能機器人HIFU控制的插補算法
在智能機器人的結(jié)構(gòu)分析中,我們可以看到,智能機器人的并聯(lián)結(jié)構(gòu)有著虛
實映射的問題,所以在操作過程需要將離散點進行勻速運動,在映射中,將變成在關(guān)節(jié)空間中的變速運動。通過PMAC運動插補算法進行計算,根據(jù)笛卡爾坐標定義進行開發(fā),而不是直接通過操作空間的刀具軌跡實現(xiàn)運動控制。同時在運算過程中,通過二次插補算法,上下位計算機在操作中完成進一步的精細算法。
在算法中,第一次粗插補是由工控機實現(xiàn),具有具體的任務(wù),通過運動指令的解釋翻譯,軌跡段位置有離散處理,或者瞬間進行的速度插補。在這次算法中,一般會使用時間分割線,在某一個時間周期內(nèi),通過定時中斷,計算目標軌跡的坐標軸增量,同時也叫做數(shù)據(jù)采樣的位置控制。第二次算法是精插補,面向電機軸,通過PMAC來完成,主要是對位置進行控制,在電機加速或者減速過程中進行安全運行。
在此次運動中,PMAC控制卡提供了三種不同的插補方式,其中直線插補是最基礎(chǔ)的部分,處理方式相對來說比較簡單,通過起點終點以及速度的限制,提供直線插補具有s曲線加速,以及梯形加速直線插補,在指令之間具有運動融合功能。在運動指令的序列中,可以通過讀取兩三行指令,在節(jié)點的位置進行加速或者減速的處理,從而減少沖擊,提高平均速度。一般來說,直線插補是利用g01的指令,通過圓弧插補,順時針和逆時針兩種方向;第二,是樣條插補的方式,通過樣條插補的抓取控制,保障智能機器人的速度和加速度具有連續(xù)性,同時還能接觸一定的沖擊,保證指令的節(jié)點位置相對較低,保障位置的精度。通過樣條插補的方式,在各個節(jié)點位置的加速度不連續(xù)性得到解決,不同程度的沖擊緩解也得到處理,盡可能的控制由于加速福超過電機的限制而造成的風(fēng)險,或者是位置和時間曲線的畸形。在電機的可限制條件下,要注意系統(tǒng)中的插補算方式,利用其中哪個方式來進行運算。
特別是在加速度的控制中,需要運用插補算法控制整個系統(tǒng)以及驅(qū)動系統(tǒng)的慣性,保障其速度的勻速,不發(fā)生沖擊或者振動等問題,盡可能減少動態(tài)誤差,保障其焦點的精度,并減少電機軸中加速度超限的情況,通過對原來的設(shè)計軌跡進行加速處理,在不同的位置實現(xiàn)精確運算,在加速度之前,或者在減速之后。一般來說,在加減速處前的處理方式,是在操作空間中進行的,通過軌跡較大的改變,包括對突變或者超速等問題,要對離散點進行速度曲線的限制,完成指數(shù)形式的加速或者減速,這時候,插補的方式進行修正。如圖2所示。
而加減速后的插補運算則是在關(guān)節(jié)空間中進行的,通過映射為關(guān)節(jié)中的序列號,從而完成速度的均勻控制。前一種運算又是主要是對運動軌跡的輪廓不會造成較大的影響,而缺點則是需要對加速或者減速的參數(shù)進行精確的計算。后第二種運算的主要有點則剛好相反,在智能機器人中,需要輸入和輸出復(fù)雜的非線性映射,采用改種方式進行運算的時候,焦點的運動情況相對來說比較復(fù)雜。通過精確的分析,保障其運動軌跡的合理性,同時有效控制速度。一般來說,PMAC具有相應(yīng)的加減速功能,能夠相應(yīng)的完成加減速的插補運算,對用戶保持透明性,但是不對其進行任何的干預(yù)。
在HIFU插補算法中,其中比較重要的是對插補前的時間常數(shù)以及周期的選擇。插補節(jié)點之間的加速度極有可能造成跳變和超越的情況,通過插補運算,在智能機器人的HIFU焦點軌跡上進行插補,加大可能的消除指令軌跡的突變,并保障整個軌跡在各種速度和加速度上的參數(shù)不超過限制,采用合適的做法,用指數(shù)形式以及插補加減速原則,同時使用精插補的方式,保障其速度正常。
一般來說,加速度的常熟直接取決于智能機器人中的電機軸行程指標,而其最高的運行速度一般不會超過5kHz,電機中的最高加速度的自安置為80kHz,因而在電機伺服系統(tǒng)中,有可能存在低頻振動的問題,但是由于串并聯(lián)的運行速度區(qū)間,發(fā)改了電機的動態(tài)范圍,因而需要通過電機來進行問題的解決。同時在實際的處理過程中,還需要對電機軸的速度進行必要的限制。
參考文獻
[1]喻道遠,羅飛,范良志.串并聯(lián)機器人控制HIFU的插補算法的研究[J].中國醫(yī)療器械雜志,2006(04).
[2]張兆印.六自由度并聯(lián)機器人的運動學(xué)分析[J].黑龍江大學(xué)自然科學(xué)學(xué)報,1992(02).
[3]王強.六自由度工業(yè)機器人的運動軌跡插補算法的研究[J].浙江工業(yè)大學(xué),2011.
作者單位
浙江大學(xué)深圳研究院 廣東省深圳市 518000
