仿真物理聯合研制試驗在動量球產品設計中的應用
2017-03-21 20:08:44黃首清楊勇劉守文范春石周
計算機輔助工程 2017年1期
關鍵詞:有限元
黃首清++楊勇++劉守文++范春石++周原
摘要: 針對某微納衛星新研制的三軸姿控動量球,采用仿真物理聯合研制試驗方法分析和驗證其力/位移加載策略、結構強度和性能.仿真結果表明:產品設計薄弱環節為鎖緊機構與轉子球接觸面的外側尖點處、鎖緊機構遠離接觸面的一側中間等.物理試驗得到產品的1階頻率在206.9 Hz,與仿真結果基本一致;測得動量球力矩輸出值約為0.02 N·m.根據物理試驗結果提出產品設計改進建議.
關鍵詞: 微納衛星; 動量球; 結構強度; 薄弱環節; 有限元
中圖分類號: V448.22文獻標志碼: B
Application of simulationphysical combined developmental
test on design of reaction sphere
HUANG Shouqing1, YANG Yong1, LIU Shouwen1, FAN Chunshi2, ZHOU Yuan1
(1. Beijing Key Laboratory of Environment & Reliability Test Technology for Aerospace Mechanical &
Electrical Products, Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China;
2. Qian Xuesen Laboratory of Space Technology, Beijing 100094, China)
Abstract: As to the new threeaxis attitude control reaction sphere of a micro/nano satellite, the force/displacement loading method and structure strength and performance are analyzed and verified by simulationphysical combined developmental test method. The simulation results indicate that, some design vulnerable spots are at the outer cusp of contact zone between locking arm and rotation ball, and the middle area of opposite surface of the locking arm toward the contact zone. The first order frequency is 206.9 Hz, which is obtained by physical test and basically consistent with the simulation result, and the output torque of the reaction sphere is tested as 0.02 N·m approximately. Some improvement design suggestions are proposed.
Key words: micro/nano satellite; reaction sphere; structure strength; vulnerable spot; finite element
收稿日期: 2016[KG*9〗10[KG*9〗12修回日期: 2016[KG*9〗11[KG*9〗15
基金項目: 國防科工局技術基礎科研項目(質量與可靠性)(JSZL2015203B009)
作者簡介: 黃首清(1986—),男,河南駐馬店人,博士,研究方向為機電產品可靠性試驗和計算機仿真,(Email)hshouqing@163.com0引言
三軸姿控動量球是隨著立方體衛星等微納衛星向高性能實用化迅速發展而出現的新型姿態控制系統.[12]動量球具有的三軸直驅姿態控制能力、高功能密度比、高容差性、無軸間交聯耦合、動平衡魯棒性等優勢,展現出獨特的吸引力,受到各航天強國的關注和重視.[35]
目前,國內外鮮有對動量球設計中開展研制試驗的報道.美國高度重視研制試驗,也非常重視計算機仿真技術在研制試驗中的作用,成立“卓越中心”推動計算機仿真技術在研制試驗中的應用.[68]
本文針對新研動量球開展仿真物理聯合研制試驗,對動量球研制樣機的結構強度進行驗證,發現產品設計薄弱環節,提出產品設計改進建議.
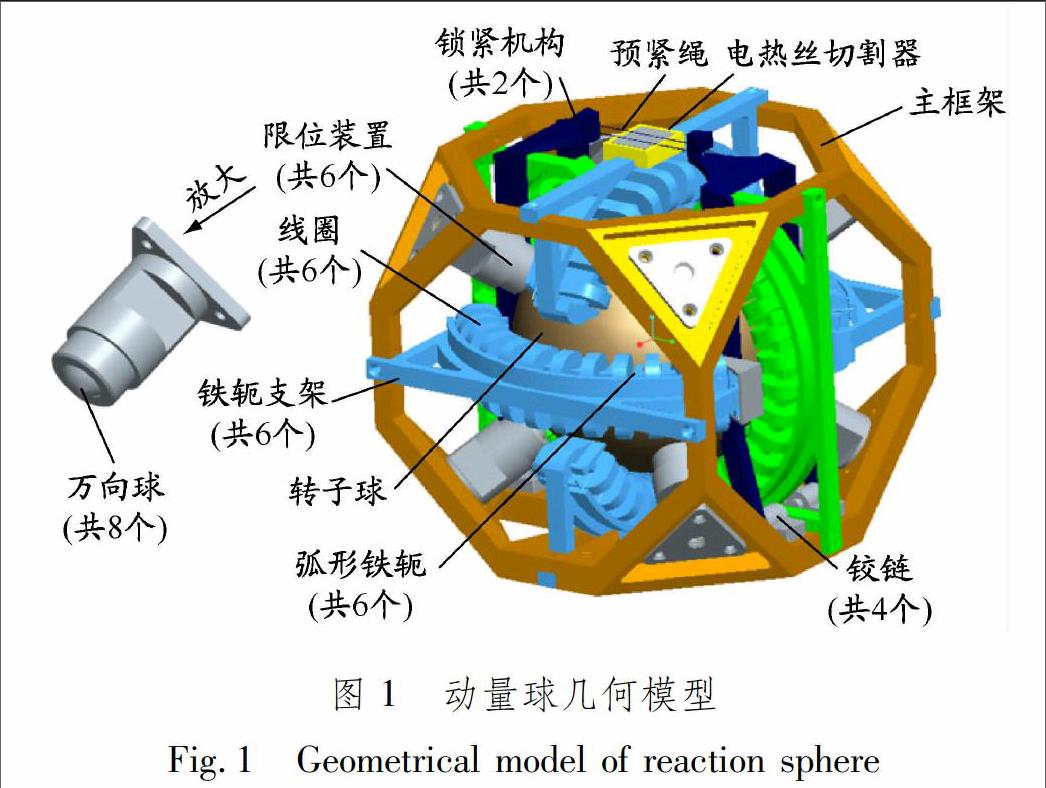
1動量球結構簡介
動量球主要由主框架、轉子球、限位裝置、鎖緊機構、線圈、鐵軛支架、預緊繩和鉸鏈等組成,其幾何模型見圖1.在預緊繩的作用下,鎖緊機構繞鉸鏈發生轉動,夾緊轉子球,轉子球同時被8個限位裝置的萬向球約束.
定義以轉子球為中心的坐標系為:(1)坐標原點O為轉子球的球心;(2)x軸為過坐標原點的鉸鏈孔軸線方向;(3)z軸為過坐標原點垂直于底座平面的方向;(4)y軸定義為過坐標原點與z軸和x軸構成右手坐標系的方向.
2仿真試驗
2.1分析思路
由于動量球為復雜多體接觸結構,存在多個接觸對,直接進行分析常常計算不收斂,因此采取“化整為零,各個擊破”的力傳遞法分析思路.
(1)首先計算鎖緊機構提供的預緊壓力與預緊力/位移的關系.
(2)將計算得到的鎖緊機構對轉子球的作用力作為轉子球受到的載荷,結合發射段的轉子球受到的準靜態載荷,對轉子球與萬向球之間的接觸應力進行分析.
(3)對模型進行簡化:靜力分析時忽略主框架、底座等剛度較大、不會發生明顯變形的構件;忽略鉸鏈處的8個接觸對,刪去鉸鏈機構,直接在鎖緊機構的相應位置添加鉸鏈約束;忽略限位裝置中萬向球與卡槽之間的8個接觸對,直接在萬向球上施加固支約束;刪去螺釘和螺紋孔,將所連接結構固聯處理.
2.2轉子球鎖緊機構的接觸受力分析
為計算鎖緊機構提供的預緊壓力與預緊力/位移的關系以及鎖緊機構對轉子球的作用力,建立轉子球鎖緊機構模型,進行接觸受力分析.
2.2.1網格劃分
轉子球鎖緊機構的網格劃分見圖2.考慮到模型的對稱性,僅建立一側的鎖緊機構,共有8.16萬個節點,4.76萬個單元.
2.2.2邊界條件和載荷
轉子球鎖緊機構的邊界條件和載荷見圖3.
在轉子球上施加固支約束,鎖緊機構鉸鏈處施加圓柱支撐約束,鎖緊機構頂端施加力或位移約束,在鎖緊機構與轉子球間設置接觸對,摩擦因數設為0.2.為討論不同載荷下的應力分布以及力載荷與位移載荷的對應關系,設置多種載荷進行分析,見表1.
表 1轉子球鎖緊機構的靜力分析載荷
Tab.1Loading in static analysis on rotation balllocking arm序號力載荷/N位移載荷/mm120 0250 0380 04 00.055 00.106 00.202.2.3結果分析
80 N力載荷下和0.02 mm位移載荷下轉子球鎖緊機構的等效應力云圖、接觸面的應力云圖分別見圖4和5.由圖4和5可以看出:最大應力發生在鎖緊機構與轉子球接觸面的外側尖點處,此外,鎖緊機構遠離接觸面的一側中間、鉸鏈孔上圓周面和施加載荷處也是潛在的結構薄弱區域.將表1中各個載荷下的計算結果整理,見表2.分別對最大等效應力與加載力/位移進行線性擬合,得到最大等效應力與加載力/位移的函數,見圖6.a)整體等效應力云圖b)鎖緊機構接觸面的應力云圖圖 480 N力載荷下轉子球鎖緊機構仿真結果,MPa
Fig.4Simulation results of rotation balllocking arm under 80 N force,MPa
a)整體等效應力云圖b)鎖緊機構接觸面的應力云圖圖 50.2 mm位移載荷下轉子球鎖緊機構仿真結果,MPa
Fig.5Simulation result of rotation balllocking arm under 0.2 mm displacement loading,MPa
/
N位移載荷/
mm最大等效
應力/MPa最大等效應力位置最大應力位置材料
許用應力(安全因數1.5)/MPa安全裕度120013.6鎖緊機構與轉子球接觸面的外側尖點處182.719.1250026.8鎖緊機構與轉子球接觸面的外側尖點處182.79.2380051.1鎖緊機構與轉子球接觸面的外側尖點處182.74.4400.0517.4鎖緊機構與轉子球接觸面的外側尖點處182.714.7500.1034.5鎖緊機構與轉子球接觸面的外側尖點處182.76.9600.2078.0鎖緊機構與轉子球接觸面的外側尖點處182.72.5a)加載力
b)加載位移
Fig.6Relationships between maximum equivalent stress and loading displacement/force of rotation balllocking arm
加載力為293.5 N或加載位移為0.46 mm時,最大等效應力為182.7 MPa,安全裕度為0.考慮到計算誤差且為保證足夠的安全裕度(取為1),建議加載力不超過91.35 N或加載位移不大于0.23 mm.
2處鎖緊機構對轉子球的合力方向沿z軸負向,大小為單個鎖緊機構力的2倍.計算在各種力/位移載荷下鎖緊機構對轉子球的合力,見表3.
表 3鎖緊機構對轉子球的力
Tab.3Force of locking arm on rotation ball序號力載荷/N位移載荷/mm合力/N120036.0250090.83800146.8400.0566.2500.10134.8600.20282.6
2.3轉子球限位裝置萬向球接觸受力分析
根據計算出的鎖緊機構對轉子球的作用力,結合發射段的轉子球受到的準靜態載荷,建立轉子球限位裝置萬向球接觸模型.在鎖緊機構的預緊作用下,轉子球限位裝置受到z負向的力,所以在模型中忽略頂部的4個限位裝置.另外,為減小接觸對、降低求解復雜度,忽略底部4個限位裝置的支撐體,僅保留萬向球,且對萬向球施加固支約束.
2.3.1網格劃分
轉子球限位裝置的網格劃分見圖7,共有6.39萬個節點,3.11萬個單元.
Fig.7Mesh of rotation ball and restrainers
2.3.2邊界條件和載荷
在轉子上施加z負向的力載荷,對4個限位裝置萬向球施加固支約束,見圖8.參考CZ2F火箭準靜態載荷條件的最大過載5.4g,取安全因數為3,因此對z正向施加大小為162 m/s2的加速度,模擬發射段的準靜態載荷.
圖 8轉子球限位裝置的邊界條件和載荷
Fig.8Boundary conditions and loading of rotation
ball and restrainers
2.3.3結果分析
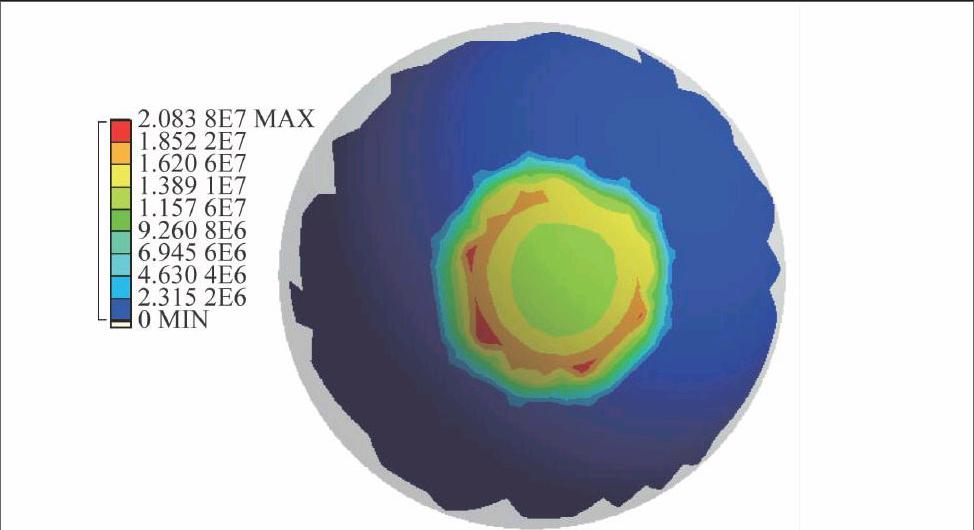
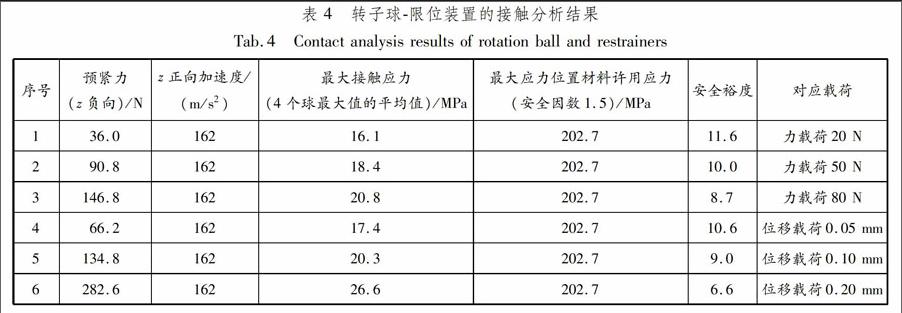
典型的限位裝置(萬向球)與轉子球接觸區域的壓力分布云圖見圖9.因此可知:4個萬向球的接觸壓力分布相似,80 N力載荷下的最大接觸應力大約為20.8 MPa.不同載荷下最大接觸應力見表4.
圖 980 N力載荷下限位裝置與轉子球接觸應力云圖,MPa
Fig.9Contact stress contour between restrainers and
rotation ball under 80 N force,MPa表 4轉子球限位裝置的接觸分析結果
Tab.4Contact analysis results of rotation ball and restrainers序號預緊力
(z負向)/Nz正向加速度/
(m/s2)最大接觸應力
(4個球最大值的平均值)/MPa最大應力位置材料許用應力
(安全因數1.5)/MPa安全裕度對應載荷136.016216.1202.711.6力載荷20 N290.816218.4202.710.0力載荷50 N3146.816220.8202.78.7力載荷80 N466.216217.4202.710.6位移載荷0.05 mm5134.816220.3202.79.0位移載荷0.10 mm6282.616226.6202.76.6位移載荷0.20 mm
最大接觸應力與預緊機構的預緊力/位移(關系見圖10)呈現很強的線性關系.計算得到當加載力為2 412.7 N或加載位移為3.06 mm時,最大等效應力為202.7 MPa,安全裕度為0.考慮到計算誤差且為保證足夠的安全裕度(取為1),建議加載力不應超過1 113.3 N或加載位移不應大于1.41 mm.結合基于對轉子球鎖緊機構進行分析得到的結論,在保證安全裕度不小于1的情況下,建議加載力不應超過91.35 N或加載位移不應大于0.23 mm.從最大接觸應力與預緊機構的預緊力/位移的函數增長率可以看出,最大接觸應力對預緊力和預緊位移不太敏感,對加速度載荷更敏感.
a)加載力
b)加載位移
圖 10轉子球限位裝置的最大接觸應力與加載
力/位移關系
Fig.10Relationships between maximum contact stress and loading force/displacement of rotation ball and restrainers
2.4模態分析
動量球多體結構的之間的作用力不是模態分析的重點,考慮到夾緊狀態下多體結構間基本處于緊密接觸狀態,因此可將動量球各個部分固聯后整體分析.對主框架z負向一側的底面2個螺紋孔內壁施加固支約束,對2個鎖緊機構的4個鉸鏈孔施加圓柱鉸鏈約束.對動量球的模態分析主要進行諧振頻率分析,取1 000 Hz以內的前6階振型.對于動量球方案的完整模型,模態分析結果見表5.
Tab.5Modal analysis results of integrated model of
reaction ball階次頻率/Hz振型描述1212.92251.53328.34386.5(續表)階次頻率/Hz振型描述5407.36653.5
第1階諧振頻率為212.9 Hz,遠大于120 Hz,一般不會與整星的基頻產生動力學耦合.結構強度均滿足常見頻段內正弦振動激勵下和隨機振動激勵下的設計要求.
3物理試驗及改進建議
3.1正弦掃頻試驗
試驗設備為DL540060電動振動試驗系統,掃頻范圍為5~2 000 Hz,量級為0.5g,掃描速率為4 oct/min,測點數量為1個,測點位于頂部平面.掃頻結果見圖11.
Fig.11Sine frequency sweep response result
試驗結果表明:(1)動量球1階頻率為206.9 Hz,與仿真預測結果213 Hz基本一致,初步驗證仿真試驗模型正確;(2)振動試驗后,在感應球表面發現數個細小的淺凹坑,說明感應球表面金剛石鍍膜硬度不夠,且鎖緊機構鎖緊力不足,建議在后續設計工作中予以改進.
3.2力矩測試試驗
試驗設備為六分力微振動測試平臺,該平臺通過氣浮方式使固定在大理石基座上的試驗樣球及工裝完全懸浮,實現外部干擾力矩的隔離,通過力矩傳感器測量動量球的輸出力矩.動量球常力矩測試結果見圖12.
Fig.12Torque curve obtained by test
動量球力矩輸出值在0.02 N·m左右,達到預期的設計指標,但是沖擊毛刺信號較多,應該是由于球體與限位裝置之間的裝配間隙、球體質心偏心、球體幾何圓度不足等因素導致的,建議在后續工作中對產品的制造、裝配工藝進行進一步優化改進.
4結論
通過開展仿真物理聯合研制試驗,建立新研動量球的靜力學分析模型和模態分析模型,對新研動量球的力/位移加載策略、結構強度和性能進行探索與驗證.通過研制試驗給出產品加載預緊力建議,發現動量球產品設計薄弱環節,提出設計改進建議,物理試驗結果可驗證模態分析模型、識別力矩等關鍵性能參數.本研究具體結論如下.
(1)最大等效應力pmax與加載力F的關系為pmax=0.625F-0.75;最大等效應力pmax與加載位移s的關系為pmax=408.4s-4.35.
(2)在保證安全裕度不小于1的情況下,建議加載力不應超過91.35 N或加載位移不應大于0.23 mm.最大接觸應力對預緊力和預緊位移不太敏感,對加速度載荷更敏感.
(3)潛在的結構薄弱區域為鎖緊機構與轉子球接觸面的外側尖點處、鎖緊機構遠離接觸面的一側中間、鉸鏈孔上圓周面和施加載荷處.
(4)動量球1階頻率為206.9 Hz,與仿真預測結果基本一致,初步驗證仿真試驗模型.
(5)感應球表面金剛石鍍膜硬度不夠,且鎖緊機構鎖緊力不足.
(6)動量球力矩輸出值為0.02 N·m左右,但是沖擊毛刺信號較多,后續改進應重點關注產品的制造和裝配工藝.參考文獻:
[1]CHRISTOPHER D A, BEACH R. Flywheel technology development program for aerospace applications[J]. IEEE Aerospace and Electronic Systems Magazine, 1998, 13(6): 914.
[2]PARADISO J A. Global steering of single gimballed control moment gyroscopes using a directed search[J]. Journal of Guidance, Control and Dynamics, 1992, 15(5): 12361244.
[3]DOTY J. Reaction sphere for spacecraft attitude control: WO2010/117819A1[P].
[4]ROSSINI L, CHETELAT O, ONILLON E, et al. Analytical and experimental investigation on the force and torque of a reaction sphere for satellite attitude control[C]//Proceedings of 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Budapest: IEEE, 2011: 487492. DOI: 10.1109/AIM.2011.6026980.
[5]ZHOU L, NEJAD M I, TRUMPER D T, et al. Hysteresis motor driven one axis magnetically suspended reaction sphere[C]//Proceedings of 2014 American Society for Precision Engineering Annual Meeting. Boston: American Society for Precision Engineering, 2014.
[6]Developmental test and evaluation: FY 2013 annual report[R]. Washington D C: US Department of Defense, 2013.
[7]Developmental test and evaluation: FY 2014 annual report[R]. Washington D C: US Department of Defense, 2014.
[8]Developmental test and evaluation: FY 2015 annual report[R]. Washington D C: US Department of Defense, 2015.(編輯武曉英)第26卷 第1期2017年2月計 算 機 輔 助 工 程Computer Aided EngineeringVol.26 No.1Feb. 2017
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18