空間雙柔性機械臂剛-柔耦合建模及定標誤差分析
2017-03-30 12:08:34古青波李昂趙會光
中國空間科學技術 2017年1期
古青波,李昂,趙會光
北京空間飛行器總體設計部,北京 100094
空間雙柔性機械臂剛-柔耦合建模及定標誤差分析
古青波*,李昂,趙會光
北京空間飛行器總體設計部,北京 100094
為研究空間多自由度機械臂在作大范圍運動時臂桿柔性和關節柔性對末端定標精度的影響,考慮柔性臂桿的橫/側向彎曲變形所引起軸向伸縮的二次耦合項,采用計入集中質量的轉子扭簧模型描述關節的柔性效應;提出了基于臂桿柔性的D-H參數法,遞推出空間機械臂的柔性機構運動方程;應用Hamilton原理建立了空間雙柔機械臂的一次近似剛-柔耦合動力學方程。對空間六關節雙柔機械臂末端定標誤差進行仿真,結果表明:臂桿的柔性和關節的柔性在空間機械臂的大范圍運動中是相互耦合的;在工程應用中,需要將抓取目標設定在機械臂定標誤差較小的方向上,以提高抓捕和操作的成功性。
空間機械臂;柔性臂桿;柔性關節;剛-柔耦合;定標誤差
空間機械臂作為航天器在軌應用的重要操作執行工具,可用于大型復雜航天器的在軌裝配與維修及空間站的艙段轉位與交會對接,并可作為航天員在軌出艙工作的輔助工具,甚至可以替代航天員執行指定的任務1-2]。如圖1所示為空間六關節機械臂構型,由關節、臂桿和末端執行器構成3]。

圖1 空間兩桿六關節機械臂構型Fig.1 Configuration of two arms and six joints space manipulator
空間機械臂在軌執行操作任務時,其末端對指定目標的定位精度是實現成功捕獲的關鍵,而空間機械臂系統作為一種典型的鏈式無根多體系統,由于臂桿和關節的柔性效應,在作大范圍剛性運動的同時會伴隨臂桿的柔性變形,使系統呈現明顯的剛-柔耦合特性,造成執行器在到達目標位置后,會存在小幅的殘余振動,將嚴重影響空間機械臂的末端定標精度4-6]。為了實現空間機械臂系統更精準的操控,建立準確的空間雙柔性機械臂動力學方程具有非常重要的理論價值和工程意義。
空間機械臂的柔性主要集中在柔性臂桿和柔性關節兩部分7-9]。文獻7]采用兩套廣義坐標分別描述機械臂的剛體運動和臂桿的柔性變形,柔性臂桿和柔性關節分別以桿單元和關節單元進行描述,但分析過程中未考慮二者的耦合作用;文獻8]研究了由單臂桿和單關節所組成系統的全柔性耦合作用,并從中取得了一些有價值的規律,但對于復雜多桿和多關節的機械臂系統很難適用;文獻9]利用柔性轉子梁單元模型,綜合考慮了柔性臂桿和柔性關節及其耦合作用的影響,但僅建立了平面柔性機械臂的動力學方程,且在分析過程中未計及動力剛化10]的一次耦合效應,對于空間大范圍剛體運動的柔性機械臂分析時,會導致結果的發散。
本文以空間多自由度機械臂系統作為研究對象,在動力特性分析的過程中,計及臂桿和關節的雙柔效應,采用計入臂桿柔性的D-H參數法進行空間機械臂的機構運動分析,應用Hamilton原理建立空間雙柔性機械臂的一次近似剛-柔耦合動力學方程,并對臂桿柔性、關節柔性及雙柔性對機械臂末端定標精度的影響進行了仿真分析。
1 空間雙柔性機械臂剛-柔耦合動力學建模
1.1 柔性機械臂的變形關系描述

(1)
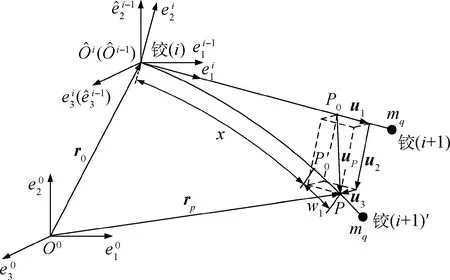
圖2 空間機械臂柔性臂桿等效力學模型Fig.2 Equivalent mechanical model of space manipulator flexible arm
應用一致質量有限元離散化原理,可將單元的變形量w用插值形函數12]表示,則柔性臂桿中心軸線上任意點P在浮動基下的變形位移矢量可表示為:
(2)

1.2 柔性機械臂的機構運動學描述
采用計入臂桿柔性效應的D-H參數法對空間機械臂系統進行運動學分析,如圖3所示,各坐標系13]確立方式如下:

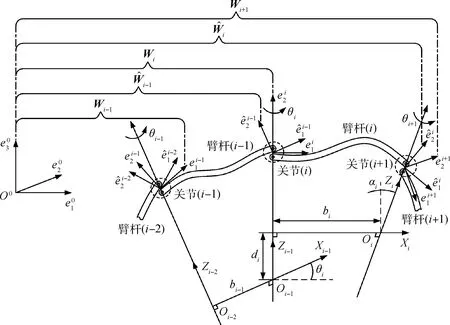
圖3 計入柔性效應的D-H坐標系及轉換矩陣示意Fig.3 D-H coordinate and transformation matrix schematic included flexible effects
(3)
式中:
(4)
(5)
將式(5)對時間求導,即可得到點P相對于基準坐標系的速度和加速度為:

(6)
由Wi=Wi-1Ei-1Ai可得:
1.3 柔性關節的動力特性描述
在小變形情況下,柔性關節可以等效為“齒輪減速器-彈性扭簧”模型14],如圖4所示。令qi為臂桿i的理論轉角,θi為臂桿i的實際轉角,εi為彈性扭簧所引起的變形轉角,則有θi=qi+εi,若齒輪減速器的傳動比為ni,則qi=ωi/ni,其中ωi為關節驅動電機轉子的轉角。
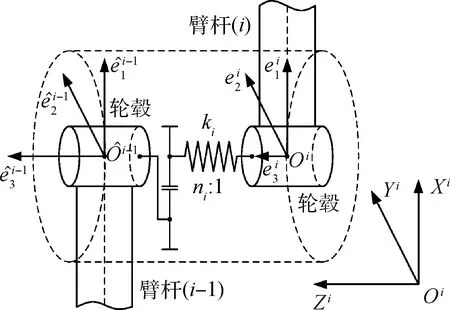
圖4 空間機械臂柔性關節等效模型Fig.4 Flexible joint equivalent model of space manipulator
(7)
(8)
1.4 空間雙柔性機械臂的剛-柔耦合動力學方程
應用Hamilton原理建立空間雙柔機械臂的剛-柔耦合動力學方程15]:
(9)
式中:T為系統的總動能:U為系統的總勢能:W為系統外力所做的功。系統的總動能T主要包括柔性臂桿的動能Tb和柔性關節的動能Tr;系統的總勢能U主要包括柔性臂桿的勢能Ub和柔性關節的勢能Ur;系統外力所做的功W為各關節驅動力矩MH所做的總功。

(10)

(11)
(12)

2 空間雙柔性機械臂末端定標誤差仿真計算與分析
對圖1所示的空間兩桿六關節械臂在抓捕目標過程中的末端定標誤差進行仿真計算與分析。空間機械臂的D-H參數及坐標系的建立如圖5所示。各給定參數如下:柔性臂桿的長度為b1=2 m、b2=1.8 m,截面積為A=8×10-3m2,密度為ρ=1.7×103kg/m3,彈性模量為E=90 GPa,泊松比為u=0.3;各關節的質量為m=5 kg,轉子的轉動慣量為J=1.25×10-2kg·m2,關節驅動的減速比為n=10,柔性關節的扭轉彈性剛度系數為k=2.5×103N·m/rad。不計空間微重力影響。
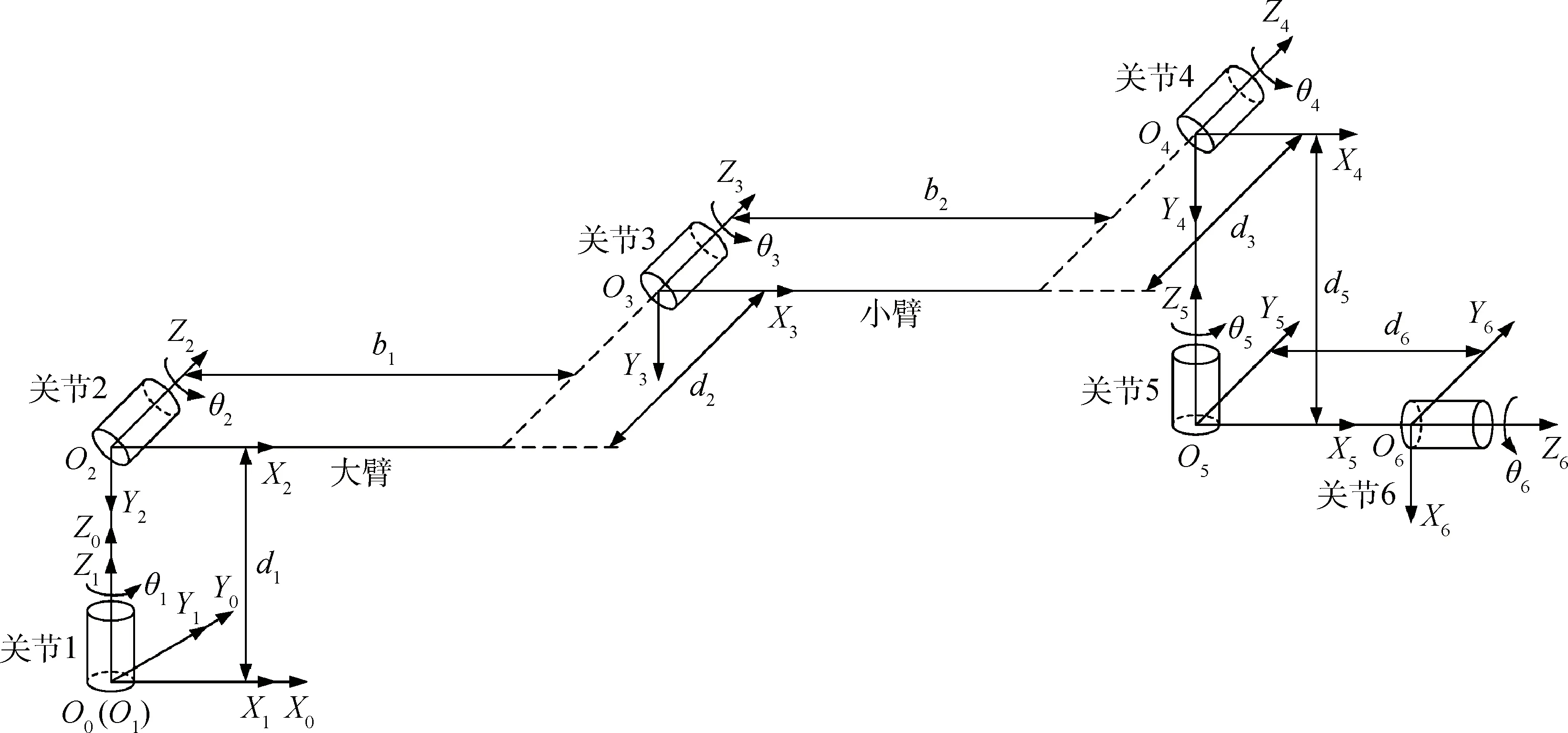
圖5 空間兩桿六關節機械臂D-H坐標系機構簡圖Fig.5 D-H coordinate mechanism chart of two arms and six joints space manipulator
空間雙柔性機械臂系統各關節初始角度和角速度均為0,各關節的驅動控制力矩為:

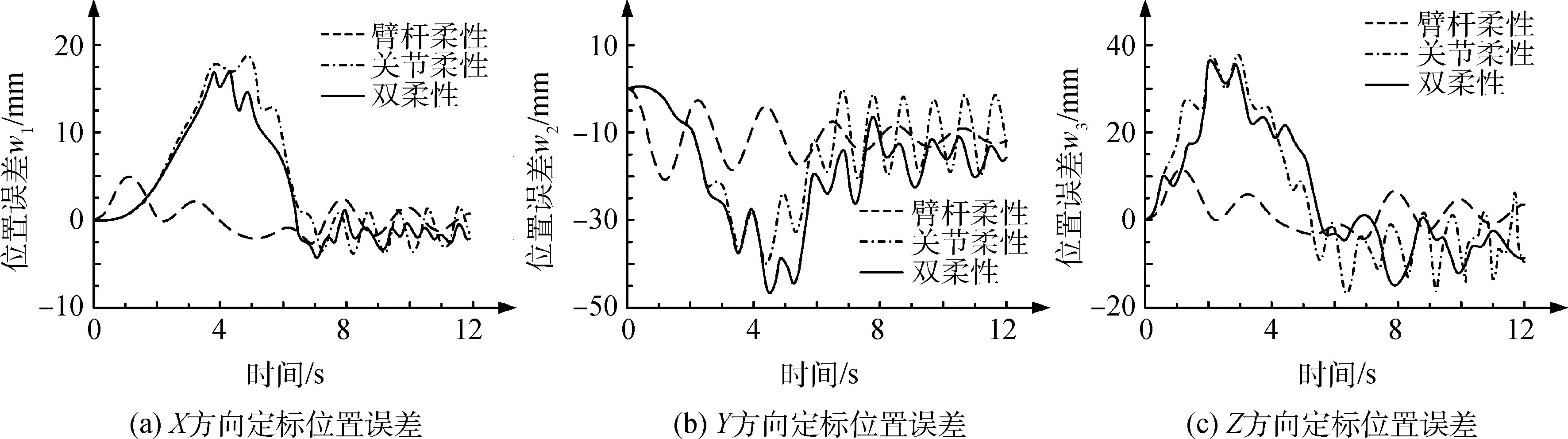
圖6 空間雙柔性機械臂的末端定標位置誤差Fig.6 Terminal calibration position error of space arm
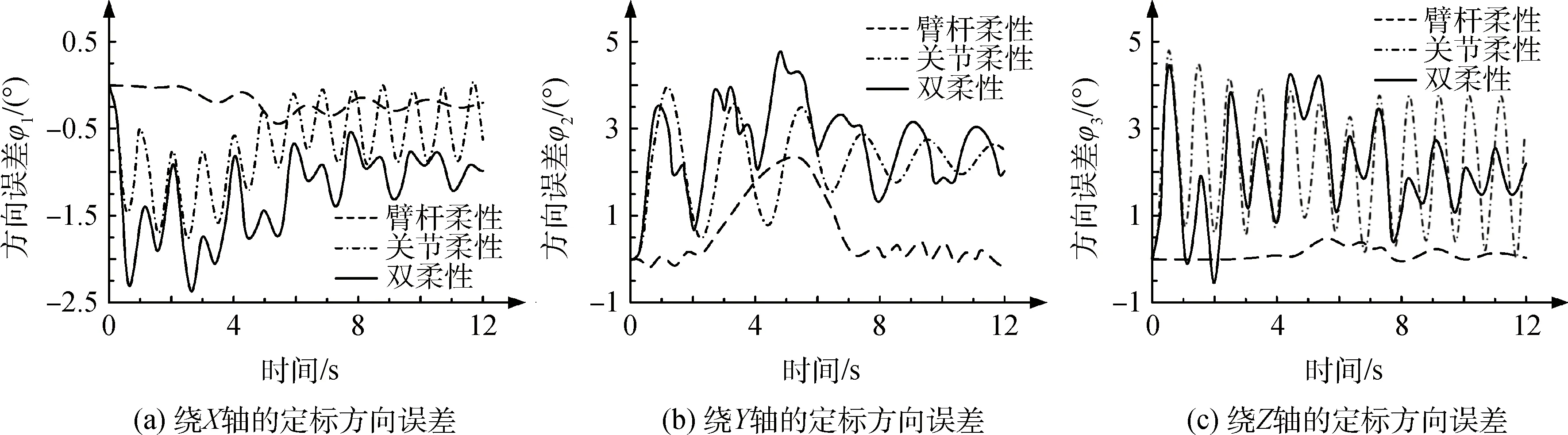
圖7 空間雙柔性機械臂的末端定標方向誤差Fig.7 Terminal calibration direction error of space arm
仿真結果圖6和圖7給出空間雙柔性機械臂末端定標的位置誤差和方向誤差,由于臂桿和關節柔性效應所引起機械臂末端定標的位置誤差和方向誤差均比較大。機械臂在運動過程中,Y方向的位置誤差最大,最大值出現在4.5 s,約為45 mm;X方向的位置誤差最小,最大值出現在4 s,約為17 mm。繞Z軸的方向誤差最大,最大值出現在4.5 s,約為4.5°;繞X軸的方向誤差最小,最大值出現在2.8 s,約為2.3°。機械臂在運動結束后,末端依然存在一定幅度的殘余振動,Y方向殘留的位置誤差最大,約為15 mm;X方向殘留的位置誤差最小,約為2.3 mm;繞Z軸殘留的方向誤差最大,約為2.5°;繞X軸殘留的方向誤差最小,約為0.9°。
3 結束語
在空間多自由機械臂動力特性的分析中,計及了臂桿和關節的雙柔效應,采用基于臂桿柔性變形的D-H參數法,遞推出空間機械臂的柔性機構運動學方程,應用Hamilton原理建立了空間雙柔性機械臂的一次近似剛-柔耦合動力學方程,并對機械臂的末端誤差進行了仿真分析。可得出結論:
1)在空間多自由度雙柔性機械臂動力特性的分析中,計入了臂桿橫/側向彎曲變形所引起軸向變形的二次耦合項,采用基于臂桿柔性變形的D-H參數法,分析了柔性機械臂的運動特性,所建立的雙柔性一次近似剛-柔動力學方程為空間機械臂末端定標誤差的分析提供了更準確數學模型。
2)空間多自由度雙柔性機械臂在運動過程中,由于臂桿和關節的柔性所引起末端定標的位置誤差和方向誤差并不獨立,而是相互耦合的;通過單獨去分析二者的柔性效應,再進行簡單的疊加,并不能真實地反映出空間機械臂的雙柔特性。
3)空間多自由度雙柔性機械臂末端定標的位置誤差和方向誤差在不同的方向上存在較大的差異,在工程實際應用中,可以將抓取目標設定在空間機械臂定標誤差較小的方向上,從而提高機械臂末端抓捕和操作的成功性。
References)
[1] 趙志剛,趙陽,葛衛平,等.空間站機械臂轉位系統動力學建模及特性分析J].中國空間科學技術,2013,33(3):22-29.
ZHAO Z G,ZHAO Y,GE W P,et al.Dynamic modeling and characteristics analysis for manipulator transformation system of the space stationJ].Chinese Space Science and Technology,2013,33(3):22-29(in Chinese).
[2] 于登云,潘博,孫京.空間機械臂關節動力學建模與分析的研究進展J].航天器工程,2010,19(2):1-10.
YU D Y,PAN B,SUN J.A literature review on dynamic modeling and analysis of the joints in space manipulatorJ].Spacecraft Engineering,2010,19(2):1-10(in Chinese).
[3] 賈宏亮,姚瓊,黃強.基于質量分配的空間機械臂剛度優化J].中國空間科學技術,2008,28(3):45-52.
JIA H L,YAO Q,HUANG Q.Stiffness optimization of space manipulator based on mass allocationJ].Chinese Space Science and Technology,2008,28(3):45-52(in Chinese).
[4] 徐文福,杜曉東,王成疆,等.空間機械臂系統總體技術指標確定方法J].中國空間科學技術,2013,33(1):53-60.
XU W F,DU X D,WANG C J,et al.Determination method of overall technology index for space manipulatorJ].Chinese Space Science and Technology,2013,33(1):53-60(in Chinese).
[5] 潘冬.空間柔性機械臂動力學建模分析及在軌抓捕控制D].哈爾濱:哈爾濱工業大學,2014:2-8.
PAN D.Research on dynamics modeling and capture control of space flexible manipulatorD].Harbin:Harbin Institute of Technology,2014:2-8(in Chinese).
[6] 徐拴鋒,楊保華,張篤周,等.面向非合作目標抓捕的機械臂軌跡規劃方法J].中國空間科學技術,2014,34(4):8-15.
XU S F,YANG B H,ZHANG D Z,et al.Trajectory planning algorithm for manipulators capturing non-cooperative objectsJ].Chinese Space Science and Technology,2014,34(4):8-15(in Chinese).
[7] MODI V,CHAN J.Performance of an orbiting flexible mobile manipulatorJ].Mechanical Design,1991,1(13):516-524.
[8] XI F,FENTON R.Coupling effect of a flexible link and a flexible jointJ].Journal of Robotics Research,1994,13(5):443-453.
[9] YUE S G,YU Y Q,BAI S X.Flexible rotor beam element for the manipulators with joint and link flexibilityJ].Mech Mach.Theory,1997,32(2):209-219.
[10] KANE T R,RYAN R R,BANER-JEE A K.Dynamics of acantilever beam attached to a moving baseJ].Journal of Guidance,Control of Dynamics,1987,10(2):139-151.
[11] RYU J,KIM S S.A general approach to stress stiffening effects on flexible multibody dynamic systemsJ].Mechanics of Structures and Machines,1994,22(2):157-180.
[12] 劉錦陽.剛-柔耦合動力學系統的建模理論研究D].上海:上海交通大學,2000 :15-26.
LIU J Y.Study on dynamic modeling theory of rigid-flexible coupling systemsD].Shanghai:Shanghai Jiaotong University,2000:15-26(in Chinese).
[13] ZHANG D G.Recursive Lagrangian dynamic modeling and simulmion of multi-link spatial flexible manipulator armsJ].Applied Mathematics and Mechanics,2009,30(10):1283-1294.
[14] SPONG M W.Modeling and control of elastic joint robotsJ].Journal of Dynamic,Measurement and Control,1987,109(4):310-319.
[15] SHARF I.Geometric stiffening in multibody dynamics formulationsJ].Journal of Guidance,Control of Dynamics,1995,18(4):882-890.
[16] 陳思佳.剛-柔耦合問題與空間多桿柔性機械臂的動力學建模理論研究D].南京:南京理工大學,2012:69-74.
CHEN S J.Researches on the rigid-flexible coupling problem and the dynamic modeling theory of multi-link spatial flexible manipulator armsD].Nanjing:Nanjing University of Science & Technology,2012:69-74(in Chinese).
(編輯:車曉玲)
Rigid-flexible coupling modeling and calibration error analysis of the space double flexible manipulators
GU Qingbo*,LI Ang,ZHAO Huiguang
BeijingInstituteofSpacecraftSystemEngineering,Beijing100094,China
To study the impact of the arm and joint flexibility on the terminal calibration precision when the space multi-degrees of freedom manipulator did spatial motion in a large range,considering the secondary coupling term of axial stretching caused by the flexible arm horizontal/lateral bending deformation,a D-H method was proposed based on flexible arm by using a rotor torsion-spring model including lumped mass to describe the flexible effect of joints.The flexible mechanism movement equation of space manipulator was proposed.The first approximation rigid-flexible coupling dynamics equations of space double flexible manipulator was established by using the Hamilton principle.The simulation of the terminal calibration error of the space six joints double flexible manipulator was carried out.The results show that:arm and joint flexibility are coupled when the space manipulator is in a large range movement.To improve the success of the capture and operation,the fetching targets should be set in the direction with a smaller calibration error of manipulators in engineering applications.
space manipulator;flexible arm;flexible joint;rigid-flexible coupling;calibration error
10.16708/j.cnki.1000-758X.2017.0011
2016-06-27;
2016-10-13;錄用日期:2016-11-24;
時間:2016-12-16 11:29:22
http:∥www.cnki.net/kcms/detail/11.1859.V.20161216.1129.012.html
古青波(1987-),男,工程師,gob06071202@163.com,研究方向為航天器總體設計、結構與機構設計
古青波,李昂,趙會光. 空間雙柔性機械臂剛-柔耦合建模及定標誤差分析J].中國空間科學技術, 2017,37(1):33-40. GU Q B,LI A,ZHAO H G. Rigid-flexible coupling modeling and calibration error analysis of the space double flexible manipulators J].Chinese Space Science and Technology, 2017,37(1):33-40 (in Chinese).
V423.7;TP241.3
A
http:∥zgkj.cast.cn
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
山東工業技術(2016年15期)2016-12-01 05:31:22
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44