地月自由返回軌道設計
2017-03-30 01:29:02王丹陽鄧輝
中國空間科學技術 2017年1期
關鍵詞:設計
王丹陽,鄧輝
南京大學 天文與空間科學學院,南京 210023
地月自由返回軌道設計
王丹陽*,鄧輝
南京大學 天文與空間科學學院,南京 210023
載人月球探測任務需要著重考慮任務的安全性,能否“自由返回”是很重要的一項指標。在軌道設計上存在兩項要求,首先是地月轉移,然后是經月球近旁轉向并判斷能否返回地球,即實現飛越月球以后的無動力返回。文章結合精確的行星歷表(DE405),首先比較不同力模型中同一條軌道的返回情況,以確定初始軌道設計過程中需要考慮的攝動力;然后分析了返回時近地距的各種影響因素,包括出發時刻、轉移時間、傾角組合等,提出了一種可使返回近地距逐漸向設定的目標值靠攏的單向搜索方法,該方法簡單易行,可信度高,能夠滿足軌道設計時要求的各項約束條件。該工作對中國將要進行的載人月球探測任務中需要用到的自由返回軌道的設計具有一定的參考價值。
自由返回軌道;力模型;返回近地距;影響因素;地球端傾角范圍
嫦娥三號探測器的發射成功,說明中國無人軟著陸月球探測技術的成熟,這是月球探測的重要一步,為接下來的載人探測任務奠定了基礎。
在軌道設計時,載人探測任務要求探測器在近月點變軌時如果發生動力故障,經月球轉向后可以返回地球1]。典型例子是阿波羅13號探測器,其出現動力故障以后借助自由返回軌道安全返回,被稱為是“一次成功的失敗”2]。對于這種軌道,文獻3]從平面圓型限制性三體問題出發,研究了白道面內的自由轉移軌道特征,然后推廣到三維情形,不足之處是需要預先設置近月點。文獻4]給出了雙二體模型下自由返回軌道的設計方法,并使用二分法搜索影響返回的變量,文獻5]通過引入優化算法提高了搜索的效率,不足之處是約束條件部分單薄。文獻6]對自由返回軌道的特性進行了分析。以上文獻多采用拼接法,對拼接法而言,近月點高度不是約束條件之一7-8],只要在一定范圍內就認為滿足條件,而載人登月需要在月球附近建立環月停泊軌道,近月點高度應該是固定的。本文采用固定近月點高度,改變其他約束條件的搜索策略設計自由返回軌道。
地月自由返回軌道設計的第一步是地月轉移軌道,關于地月轉移軌道的設計可以參考文獻9],基本思路是采用雙二體拼接方法,先賦初值然后微分修正至滿足約束條件,這一過程在這里不作詳細介紹。
1 坐標系與運動方程
DE405星歷表采用的坐標系為國際天球參考系(ICRS),與歷元J2000.0平赤道系差別很小,一般可認為二者等價。在地心J2000.0平赤道坐標系中,探測器需要滿足的比較完整的力模型為
(1)
式中:rmp=rep-rem,rsp=rep-res,rem,res由DE405歷表給出;μe,μm,μs分別是地球、月球、太陽的引力常數;as,ap分別是光壓、七大行星的攝動,這里不考慮地、月的非球形引力、潮汐、大氣等。對于限制性四體模型,只需要考慮前三項。本文在探討發射窗口的問題時還涉及日地旋轉坐標系(見圖1),由于地月轉移時間3d左右,這段時間地球只公轉過很小的角度,不再進行轉換。月心段軌道采用J2000.0月心平赤道系(坐標原點移至月心,坐標軸平行)。
光壓的表達式為
(2)
(3)
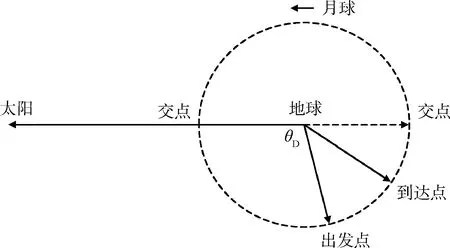
圖1 日地旋轉坐標系中天體構形示意Fig.1 Illustration of celestial bodies configuration in Sun-Earth rotating frame
2 不同模型中返回情況的比較
第三體攝動的表達式為
(4)
式中:r′為由天體指向探測器的距離矢量;rei為該天體的地心坐標。設探測器的地心坐標為r,探測器—地球—第三體夾角為θ。
(5)
(6)
(7)
當θ=0°或180°時,
(8)
攝動量級
(9)
對地月轉移軌道,r不超過地月距離,如果取為3.8×105km,對于太陽攝動(μs/μe≈332 946)該比值約為1.08×10-2。而考慮其他行星的攝動時,如木星的攝動(μj/μe≈317.9),木地最近距離近似取4AU,該比值為8×10-8,充分說明行星攝動很小。關于第三體攝動的具體影響,下面的數值計算也可以說明問題。同一條軌道在各種力模型中的返回近地距如表1所示。
表1 同一條軌道在各種力模型中的返回近地距
這里同一條軌道是指出發時刻簡化儒略日MJD=58 162.3,轉移時間3.494 31d,兩端傾角分別為140°、157°,近地(月)點高度200km,升軌出發、降軌到達,這些約束條件都相同。返回近地距1是由不同的力模型經過微分修正迭代出不同的初值在相應的力模型中外推給出的結果,限制性四體模型與最后一項較為完整的力模型給出的結果相差非常小,說明對于初始軌道設計采用限制性四體模型是合理的。返回近地距2是由限制性四體模型迭代出的相同的初值在不同的力模型中外推得到的結果,縱向比較說明太陽引力的影響很大,太陽光壓的影響在數十千米的量級。兩列結果同時說明的問題是地月系中的探測器不需要考慮太陽系中其他行星的影響。下面的計算中將采用力模型1(限制性四體模型),即只考慮日、地、月的質點引力并忽略探測器質量。
3 軌道設計方法與特征分析
3.1 軌道需要滿足的約束條件
首先是地月轉移,約束條件為
(10)
式中:re,rm為地球、月球半徑;h1,h2,ii,i2為近地(月)點高度、傾角,對于停泊軌道h1=200 km。
自由返回軌道需要在此基礎上增加約束條件,假設在近月點發動機故障沒有變軌繼續向前飛行,經過足夠長的時間t在第一次靠近地球時到達環繞軌道高度或者更近的距離,最終利用大氣減速降落到地面,增加的約束條件為
(11)
取等號表示返回高度為h3的環繞軌道(一般仍為200km高度的停泊軌道),近地點有兩種計算方法,一是通過二分法判斷,因為近地點恰好是位置速度內積為零的分界點;二是程序中每步都計算地心距記錄最小值(大范圍搜索時適用),這里采用RKF7(8)自適應步長積分器,截斷誤差設置為1D-10(10-10)。
自由返回軌道的設計總的來說是一個搜索的過程,不斷變動影響rmin(t)的變量,搜索出滿足條件的變量組合。由于影響因素較多,這里先固定轉移時間,然后在搜索到的返回時近地點距離在目標值附近處通過微調轉移時間使得近地點距離滿足約束條件,找到自由返回軌道,具體流程見圖2,eps表示可接受的距離誤差,dev取1 000km。

圖2 地月自由返回軌道設計流程Fig.2 Flowchat of cislunar free return trajectory design
3.2 影響返回時近地點距離的因素
對返回時近地點距離有影響的因素就是設計地月轉移軌道時的各項約束條件:近地(月)點幅角(升、降軌),地月兩端傾角,近地(月)點高度,出發時刻和轉移時間這幾項,最終的返回時近地點距離是這幾個變量綜合作用的結果。一般來講,近地(月)點高度應設置為停泊軌道高度為固定值,考慮到實現起來的困難地月兩端傾角的設定最好是整數值。出發時刻的差別主要在于月球處在公轉軌道上的位置不同,具有周期性特征。考慮到兩脈沖轉移的能量消耗,轉移時間不能太小(小于3.0d)。下面將對上述幾種影響因素做具體分析。
(1)近地(月)點幅角的影響分析
對于決定升、降軌轉移方式的近地(月)點幅角,相同的約束條件不同的ω初值一般會收斂到兩種不同的升、降軌轉移方式上,但也有收斂到兩條同為升、降軌轉移方式的情況(兩個ω所屬區間相同),這是非常有意思的事情。兩種出發方式,兩種到達方式,返回時的近地點高度并不相同,意味著同一時刻有4種不同的返回距離。如果能夠固定升、降軌出發方式,則降至2種返回距離,搜索時采用不同的賦初值方式得到2個可行的ω來“疊加”出某一時刻返回時的最小近地點距離。
這里以一個算例說明近地(月)點幅角、地月兩端傾角、近月點高度對最終結果的影響。
表2 4種轉移方式對應的返回近地距
出發時刻為MJD=58 163.3,轉移時間3.5d,地月兩端的傾角分別為141°、157°。同一出發時刻,相同的轉移時間,總是存在4條不同的轉移軌道,并且這4條軌道的返回近地距差別很大。
(2)軌道傾角、近月點高度的影響分析
仍然采用上述算例,并采用升軌出發,降軌到達的初值設定(近月點幅角初值為π)。以此為基礎,分別變更地月兩端傾角、近月點高度得到圖3和圖4。
圖3中地球端傾角變化范圍140°~150°,月球端傾角變化范圍154°~157°,最小近地點距離對應(141°,157°)這一組合。從圖3可以看出返回時近地點距離對轉移軌道地月兩端的傾角變化非常敏感,月球端傾角差1°返回時近地距相差數千千米,地球端傾角差1°返回時近地距相差數百千米。返回時近地點距離與轉移時間的關系如圖5所示。
圖3 返回時近地點距離與兩端傾角的關系Fig.3 Relation between return perigee distances and inclination angles in both sides
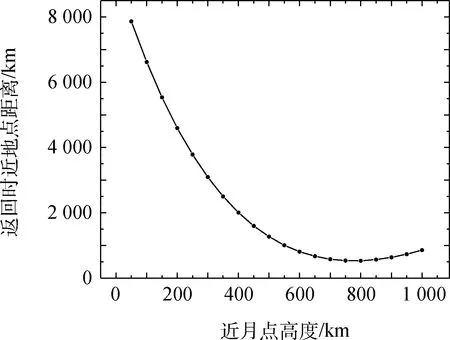
圖4 返回時近地點距離與近月點高度的關系Fig.4 Relation between return perigee distances and heights of perilune
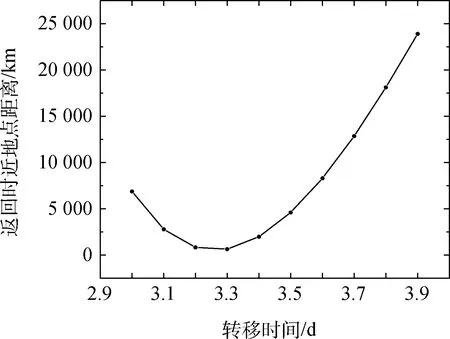
圖5 返回時近地點距離與轉移時間的關系Fig.5 Relation between return perigee distances and transfer time
(3)出發時刻、轉移時間的影響分析
這里出發時刻都是指從停泊軌道奔月時的變軌時刻,轉移時間是指從近地點到達近月點的時間。由于需要考慮月球位置的影響,以下算例中顯示的時刻是到達近月點的時刻,出發時刻需要減去轉移時間。相同的到達近月點時刻,返回近地距與轉移時間關系見圖5(約束條件同前),由該圖可知在其他條件都相同的情況下,僅通過改變轉移時間和出發時刻,存在兩條自由返回軌道。需要說明的是,在某一時刻自由返回軌道成立的組合條件并不適用于另外一個時刻,原因主要是由于月球位置的不同,影響到地球端出發時的軌道傾角。所以從停泊軌道出發,在不同出發時刻自由返回軌道是否總是存在就是一個需要驗證的問題。
對這個問題,這里采用在一定時間范圍內搜索自由返回軌道的驗證方式,具體搜索過程為:將近地、月點軌道高度都設為200km,到達近月點的轉移時間為3.5d,到達近月點時刻從2018年2月15日19時開始(MJD=58 164.8,白赤交角約20°,日地月夾角約0°)搜索60d內飛越月球以后返回時的近地距,地球端均采用升軌出發,出發時傾角30°~150°,步長10°;月球端到達時的傾角搜索范圍分為兩個階段,首先是大步長全局搜索,這時會發現可以實現自由返回的傾角范圍很小;然后在該范圍中采用小步長局域搜索,150°~165°、步長1°,搜索的目標是當前時刻存在的最小近地距離,只要該距離小于6 578km就存在自由返回軌道。
60d內出發時刻搜索步長為0.5d,該過程給出的結果如圖6所示,圖6中的4幅圖分別對應不同的近月點幅角初值ω0(不同的初值會迭代到不同的ω,同一時刻同樣的出發方式存在兩個滿足約束條件的值,當ω∈π/2,3π/2)時表示降軌,其余為升軌),圖中兩個相鄰的峰(谷)值相差27.5d。
圖7是由圖6下面兩幅圖合并而成,返回時近地點距離滿足停泊軌道高度的就是自由返回軌道,并且任一時刻只要最小距離小于該值自由返回軌道就一定存在。從圖7中看出這種軌道的存在是分時間段的(橫線以下的時間段)。
總體而言,轉移時間為3.5d的自由返回軌道比較少,以至于最初認為其是周期性存在的。但實際上,當把轉移時間縮減以后得到的結果會發生顯著變化,圖8是轉移時間為3.2d的情況。
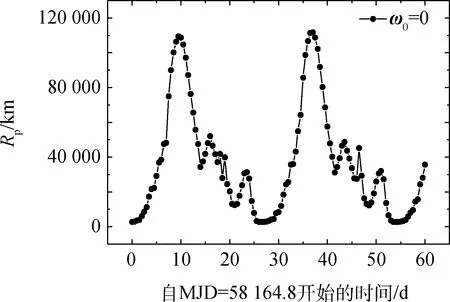
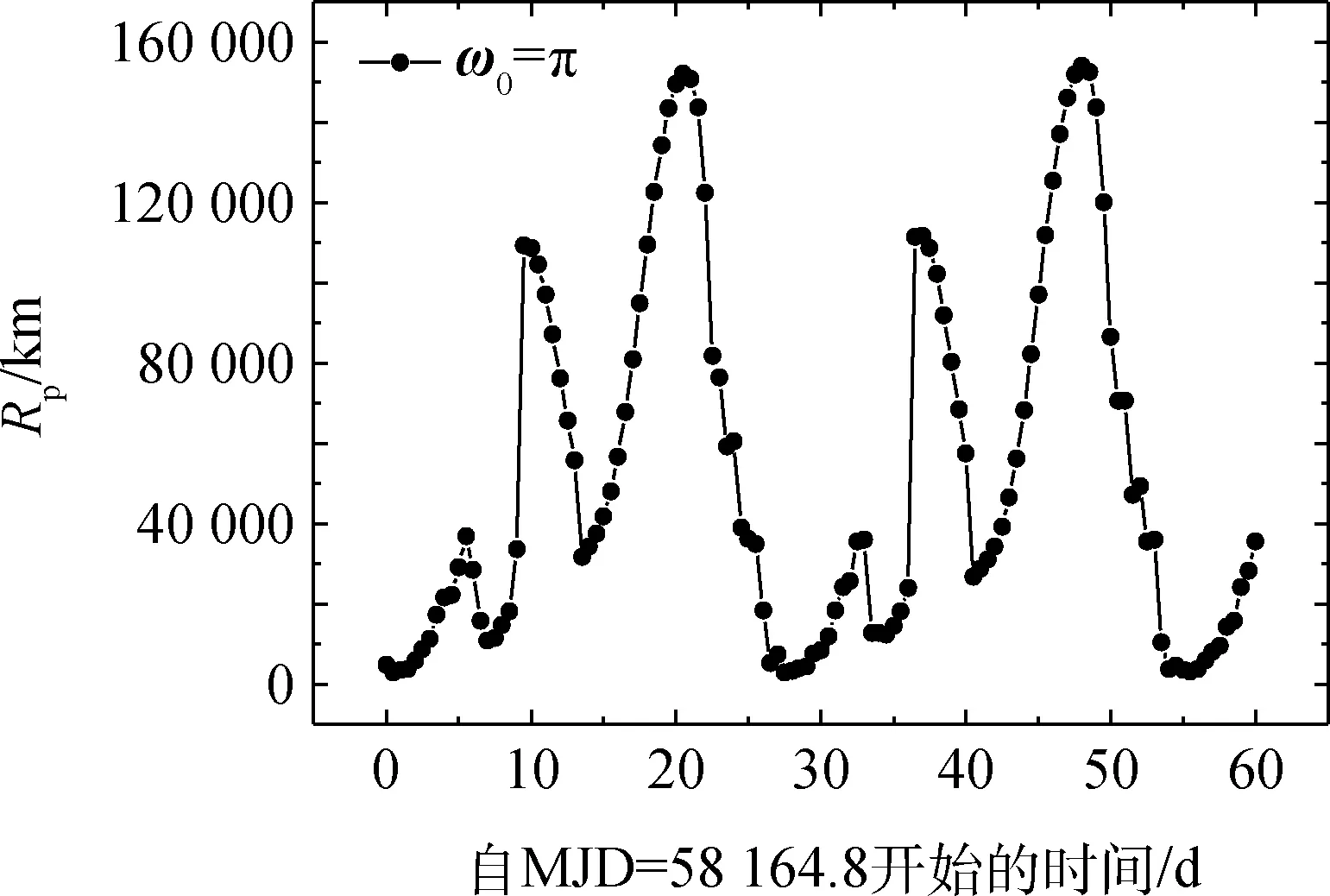

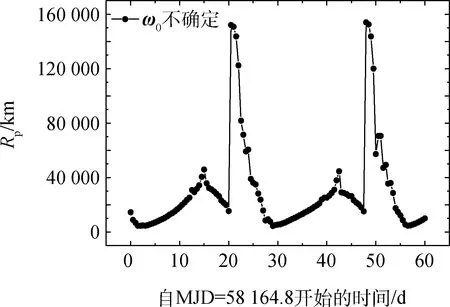
圖6 不同近月點幅角初值在60 d內飛越月球以后返回時的最小近地點距離Fig.6 Min return perigee distances with lunar swing-by in 60 days with different initial argument of perilune
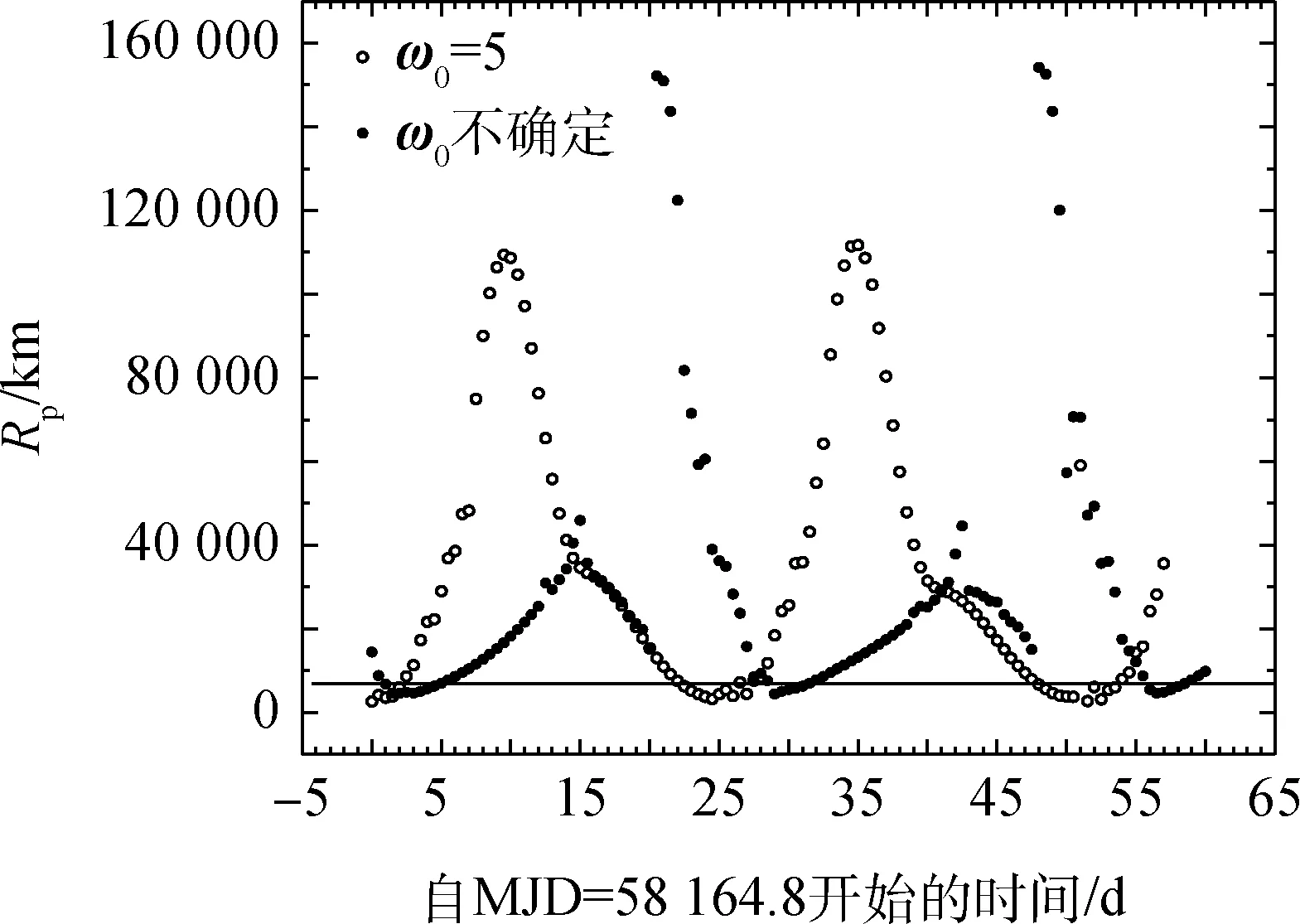
圖7 轉移時間為3.5 d的返回時最小近地距Fig.7 Minimum return perigee distances with 3.5 days transfer time
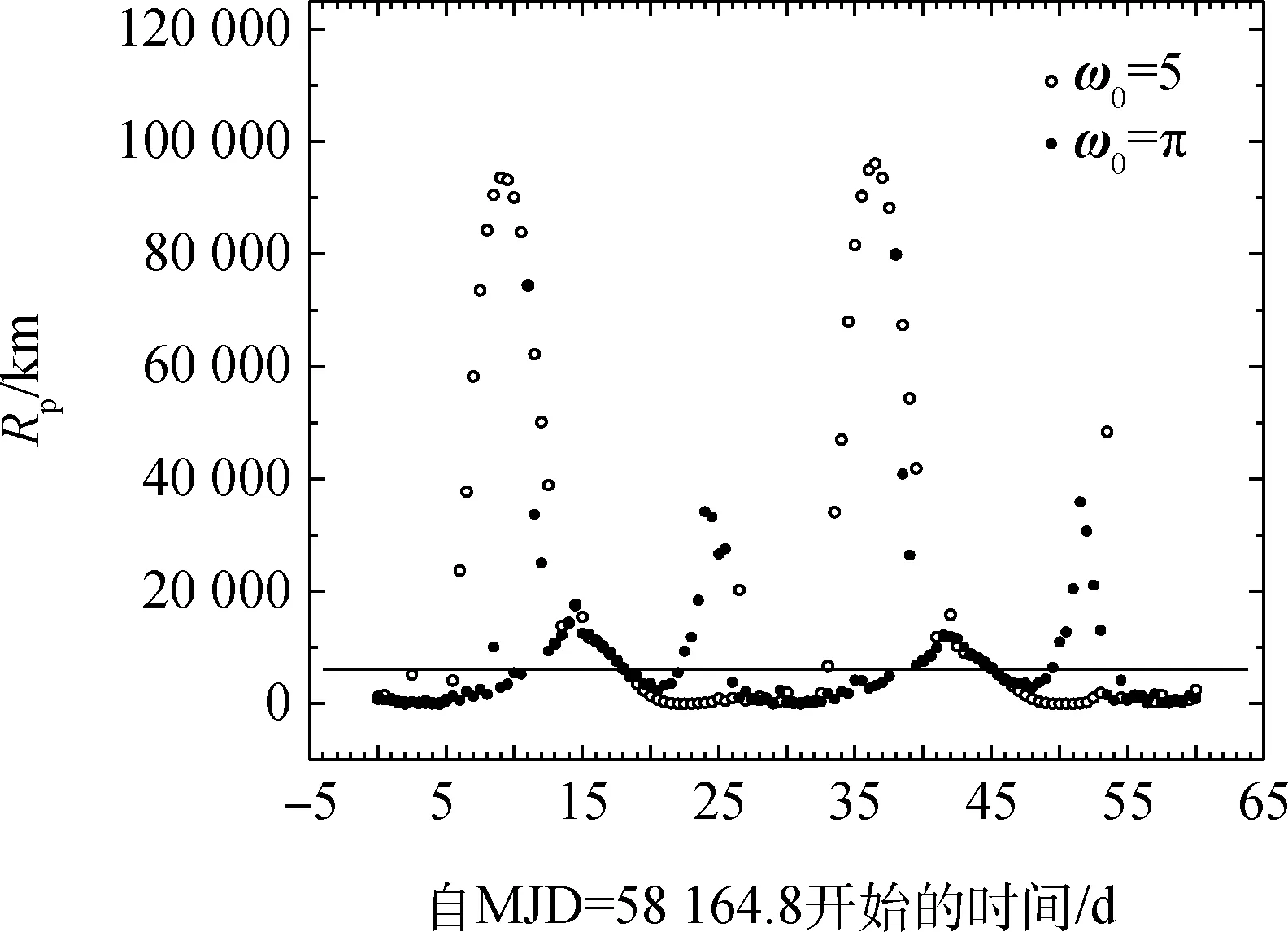
圖8 轉移時間為3.2 d的返回時最小近地距Fig.8 Minimum return perigee distances with 3.2 days transfer time
月球的公轉軌道面(白道面)與地心天球坐標系的平赤道面有兩個交點,圖7、圖8中的局部高點(兩條線取較小值)處于第14.5d、42.0d這兩個時刻,經歷表分析,這時月球處于公轉軌道的降交點附近。兩圖同時出現的現象是當月球處于降交點位置時,在其他條件都相同時返回近地距會偏大,這是升軌出發的一個現象。
轉移時間對返回近地距的影響是顯著的,轉移時間為3.2d的自由返回軌道要明顯多于3.5d的。同時相同轉移時間的返回近地距離具有周期性,該周期非常接近月球的公轉周期27.5d,說明返回近地點距離與月球的位置有關系。下面對30d范圍內的返回情況進行了更多計算(與前面不同的是采用降軌出發),結果如圖9所示。圖9中3.0d、3.1d的圖像說明從停泊軌道出發,自由返回軌道始終存在,這是非常好的結果。而當轉移時間逐漸變長以后,自由返回軌道周期性存在,再變長估計就不存在了,這里不去考察轉移時間很長的情況。
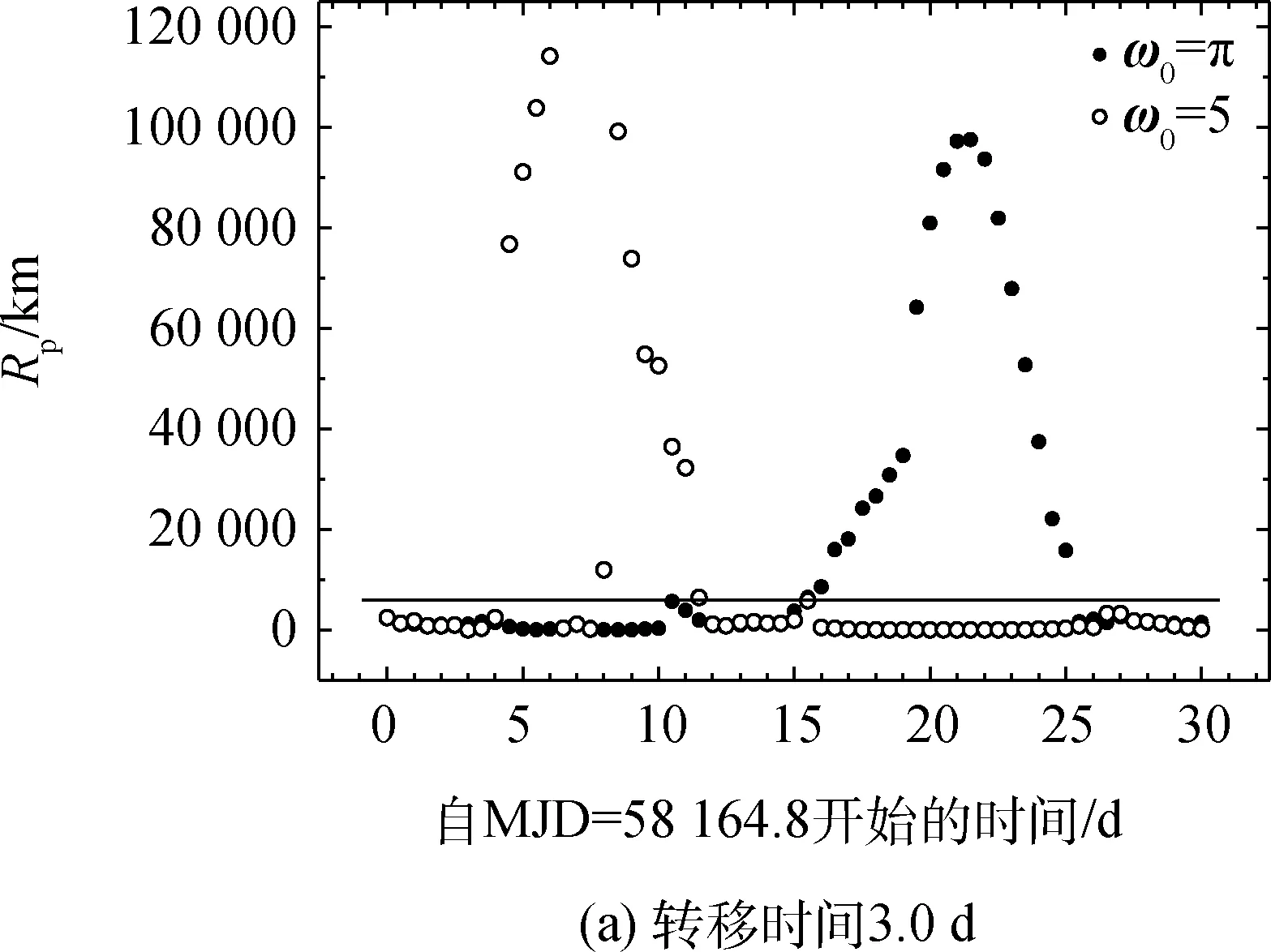
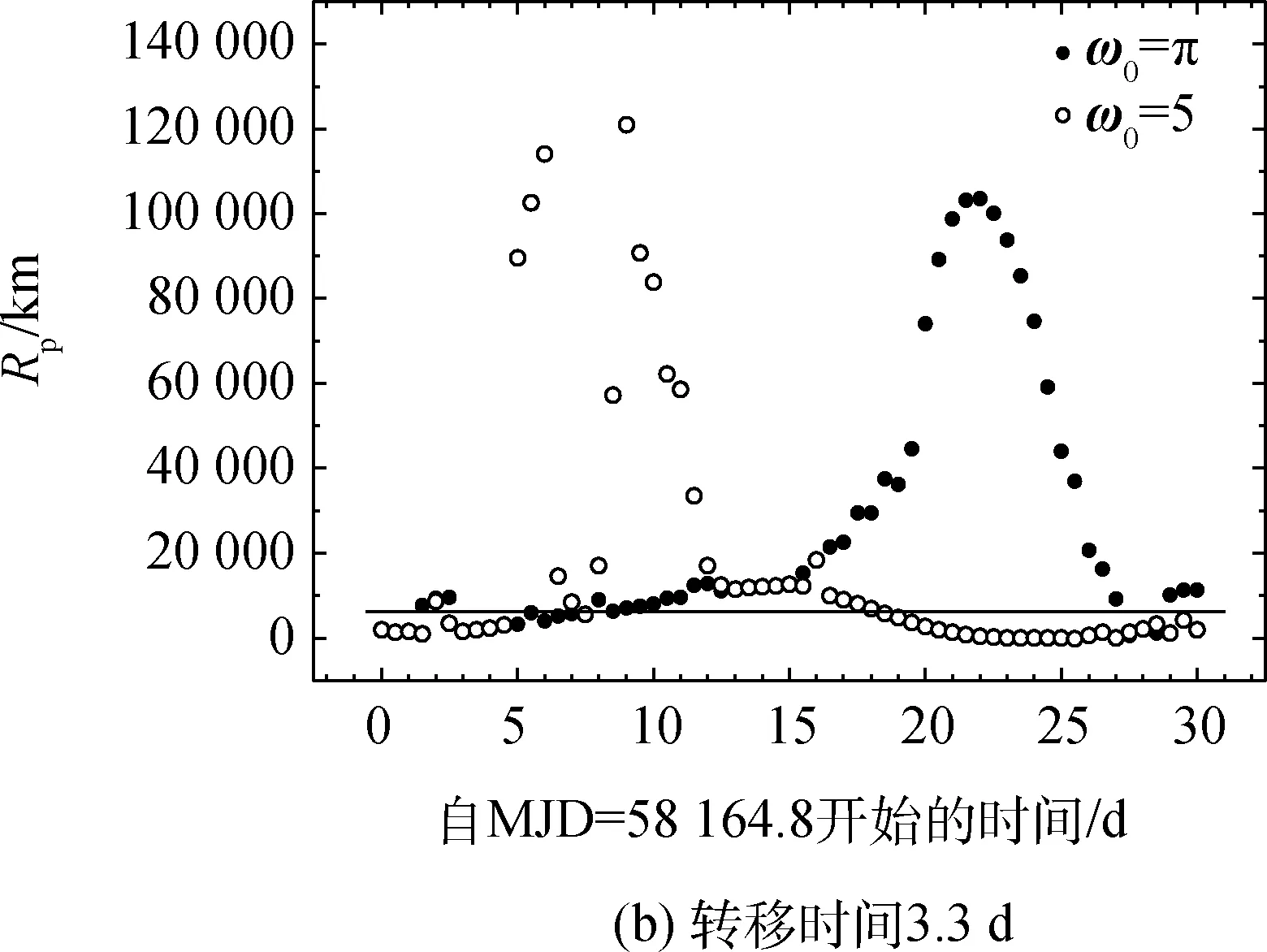
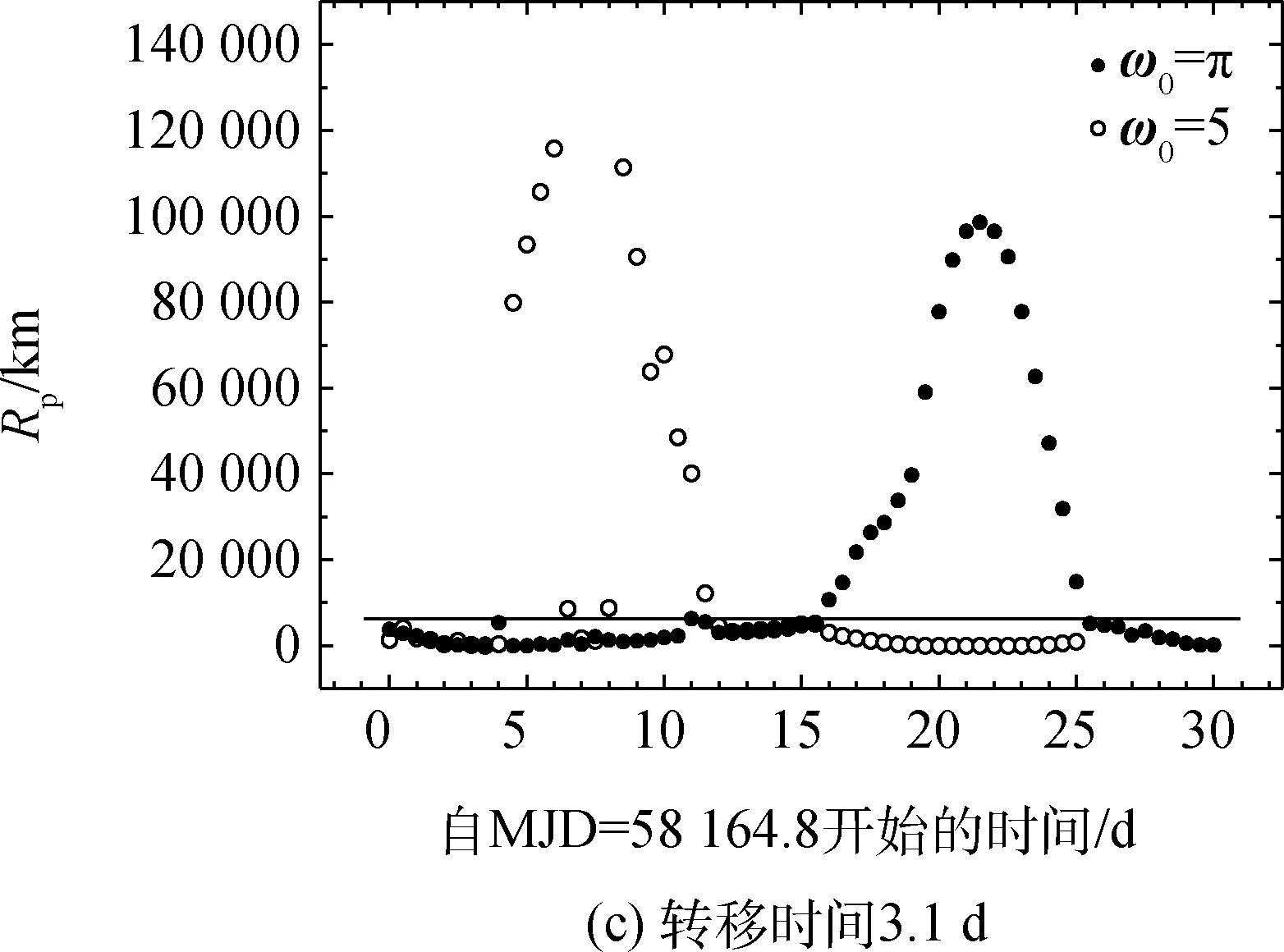
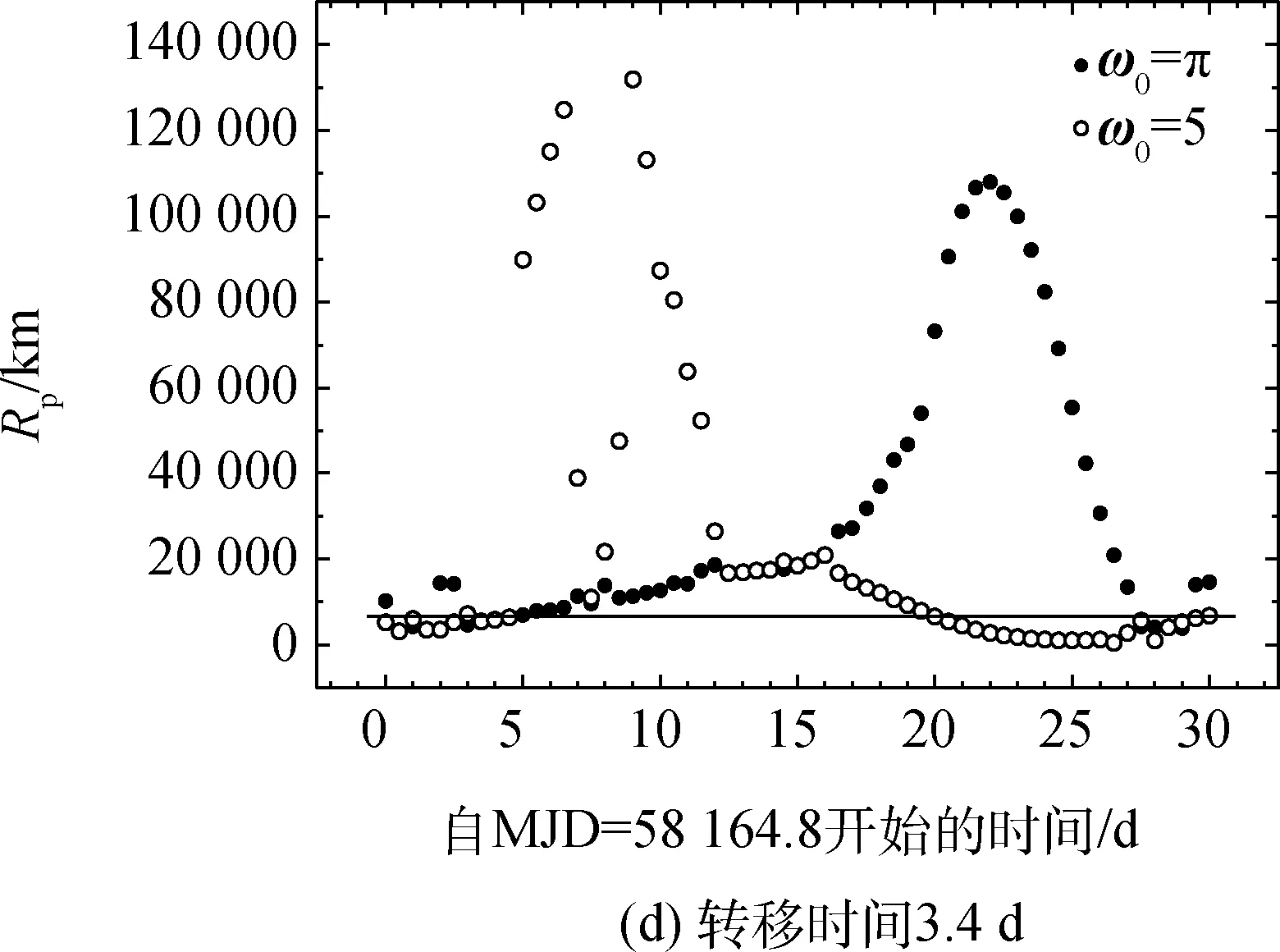
圖9 不同轉移時間返回時的最小近地距Fig.9 Min return perigee distances with different transfer time
需要說明的是,雖然轉移時間短有利于自由返回軌道的存在,但同時也伴隨著兩脈沖能量消耗的增大(在本文計算的時間范圍內會有數十米/秒的差別),這是地月轉移軌道的能量特征,是容易理解的。所以這里也不去考察3.0d以下的轉移時間,因為能量消耗會顯著增加。
3.3 不同出發時刻地球端的傾角范圍
本文在轉移軌道設計時已設定從停泊軌道切向變軌,出發時地球端的轉移軌道傾角就是停泊軌道的傾角。考慮到發射場因素,停泊軌道的傾角(超過90°時取其補角)不能小于發射場的緯度(原因與月球公轉位置對地球端出發傾角的約束是相同的),所以有必要分析自由返回軌道在地球端的傾角范圍。這里將轉移時間初值設定為3.1d,按照自由返回軌道設計流程圖在進入微調轉移時間階段記錄地球端的傾角,將搜索步長降至1°(該過程非常耗時),得到圖10。
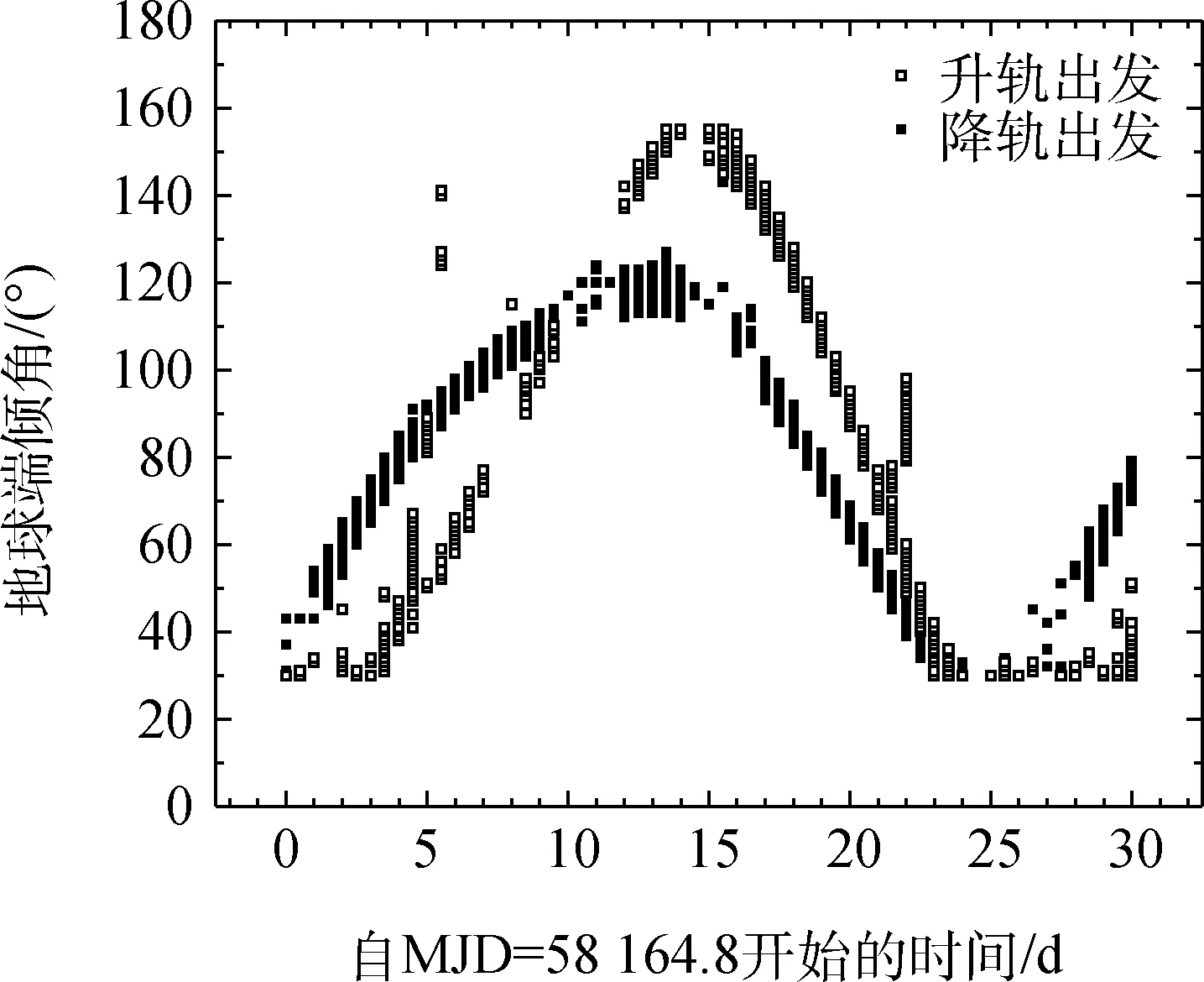
圖10 轉移時間在3.1 d附近的自由返回軌道地球端傾角范圍Fig.10 Inclination angles near the earth of free return trajectories with about 3.1 days transfer time
圖10的結果說明自由返回軌道對探測器在地球附近變軌時的軌道傾角范圍并沒有非常嚴格的要求,是在一個非常寬泛的區間內變化,這說明理論上來講地月自由返回軌道對發射場的緯度因素幾乎沒有選擇性,只要選擇合適的出發時刻,幾乎所有的發射場都有發射機會,只不過低緯度發射場這樣的機會更多一些而已。
3.4 地月自由返回軌道的圖像

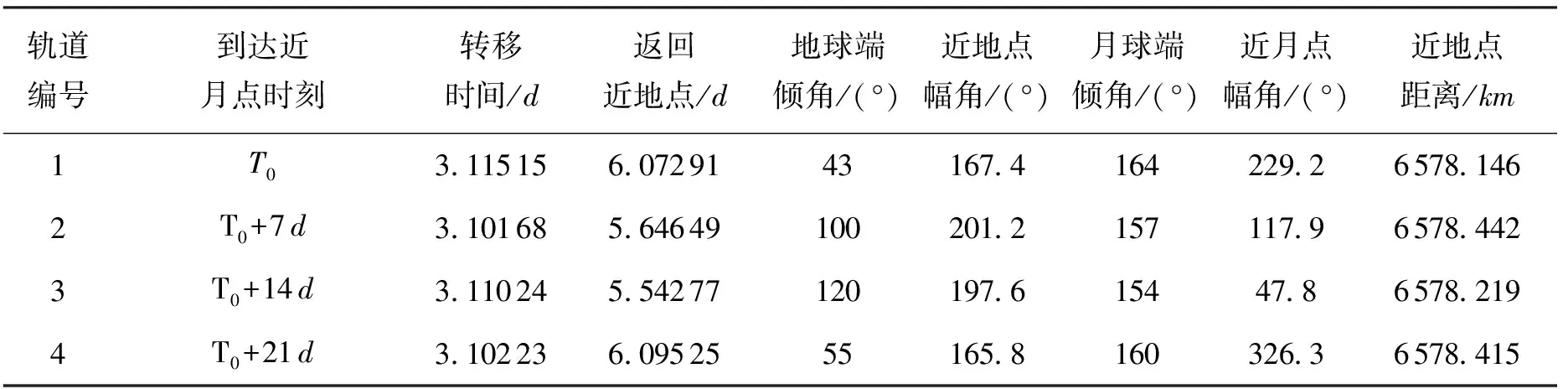
表3 4條地月自由返回軌道的具體參數
圖11 4條地月自由返回軌道Fig.11 Orbit graphics of four cislunar free return trajectories
4 結束語
本文探討了近月點高度固定的自由返回軌道的搜索方法,該方法在地月轉移時間初值設置合理時通過改變地月兩端傾角約束可以給出多個使得返回近地距在目標值附近的傾角組合,然后通過微調轉移時間最終確定自由返回軌道。由于返回近地距在目標值附近對轉移時間的變化是單調的,微調轉移時間搜索自由返回軌道這一過程是比較容易的,意味著該方法切實可行。
References)
[1] 郗曉寧,黃文德,王威. 載人登月任務中止軌道問題綜述J]. 中國科學:技術科學, 2011,41(5): 537-544.
XI X N, HUANG W D, WANG W. Review on abort trajectory for manned lunar landing missionJ]. Sci.China Tech.Sci., 2011, 41(5):537-544(in Chinese).
[2] KAUFFMAN J. A successful failure: NASA′s crisis communications regarding Apollo 13J]. Public Relations Review, 2001, 27(4): 437-448.
[3] 侯錫云,趙玉暉,劉林. 月球探測中的無動力返回軌道J]. 天文學報, 2012, 53(4): 308-318.
HOU X Y, ZHAO Y H, LIU L. Free return trajectories in lunar MissionsJ]. Chinese Astronomy & Astrophysics,2012,53(4):308-318(in Chinese).
[4] 黃文德,郗曉寧,王威,等. 基于二體假設的載人登月自由返回軌道特性分析及設計J]. 宇航學報, 2010, 31(5): 1297-1303.
HUANG W D, XI X N, WANG W,et al.Characteristic analysis and design of free return orbit for lunar manned landing based on the double two-body modelJ]. Journal of Astronautics, 2010, 31(5): 1297-1303(in Chinese).
[5] 彭祺擘,沈紅新,李海陽. 載人登月自由返回軌道設計及特性分析J]. 中國科學:技術科學, 2012, 42(3): 333-341.
PENG Q B, SHEN H X, LI H Y. Free return orbit design and characteristics analysis for manned lunar missionJ]. Sci.China Tech.Sci., 2012, 42(3):333-341(in Chinese).
[6] 張磊,于登云,張熇. 繞月自由返回軌道的設計與分析J]. 航天器工程, 2010, 19(2): 128-135.
ZHANG L, YU D Y, ZHANG H. Design and analysis of circumlunar free-return orbitsJ]. Spacecraft Engineering, 2010, 19(2):128-135(in Chinese).
[7] WILSON R S,HOWELL K C. Trajectory design in the Sun-Earth-Moon system using lunar gravity assistsJ]. Journal of Spacecraft & Rockets, 2015, 35(35):191-198.
[8] FARQUHAR R W,DUNHAM D W.A new trajectory concept for exploring the Earth′s geomagnetic tailJ]. Journal of Guidance Control and Dynamics, 1981, 4(2): 192-196.
[9] 劉林,王歆. 月球探測器軌道力學M]. 北京:國防工業出版社,2006:15-50.
LIU L, WANG X. Orbital mechanics of lunar probeM]. Beijing: National Defence Industry Press, 2006:15-50(in Chinese).
(編輯:高珍)
Cislunar free return trajectory design
WANG Danyang*,DENG Hui
SchoolofAstronomyandSpaceScience,NanjingUniversity,Nanjing210023,China
The most important thing in manned lunar explorations is safety, whether the probe can free return when facing power failure at the perilune is an important criterion. With the aim of designing cislunar free return trajectory, two requirements should be satisfied, the first is transfer trajectory design between the earth and moon, the second is whether the probe can fly back after lunar swing-by. Combined with the precise astronomical ephemeris (DE405),one trajectory in different mechanical models was compared in order to determine what perturbations should be considered in the preliminary trajectory design. Then, almost all factors (departure time, transfer time, inclination angles combination, etc.) affecting the return perigee distance of the probe was analyzed.A unidirectional search method was proposed,which could make the probe′s return perigee distance tend to the set target value gradually. The method is simple and reliable, and it can satisfy all the requirements of initial trajectory design. The work is of some value to the cislunar free return trajectory design of our manned lunar explorations in the near future.
free return trajectory; mechanical models; return perigee distance;influencing factors; inclination angle range around the earth
10.16708/j.cnki.1000-758X.2017.0013
2016-06-18;
2016-09-06;錄用日期:2017-01-24;
時間:2017-02-16 18:16:13
http:∥www.cnki.net/kcms/detail/11.1859.V.20170216.1816.006.html
國家自然科學基金(11322330)
王丹陽,鄧輝. 地月自由返回軌道設計J].中國空間科學技術,2017,37(1):57-65.WANGDY,DENGH.CislunarfreereturntrajectorydesignJ].ChineseSpaceScienceandTechnology,2017,37(1):57-65(inChinese).
V476.3
A
http:∥zgkj.cast.cn
*通訊作者:王丹陽(1990-),男,碩士研究生,wdy@smail.nju.edu.cn,研究方向為深空探測軌道設計
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04