基于SimMechanics的工業機器人工作空間關鍵技術研究
2017-04-05 15:17:13劉佳剛吳艷陽張立先
計算機時代 2017年1期
劉佳剛 吳艷陽 張立先
摘要:在Matlab/SimMechanics工具箱中,根據串聯機器人關節的運動鏈特征,建立了串聯機器人模型,在常用工作空間求解方法的基礎上,提出了基于SimMechanics求解工作空間的一種方法。通過關節角度等步長轉動約束,求解機器人末端的位置,通過多次包絡形成包絡線和包絡面,經過數據的后處理和可視化,形成機器人的工作空間輪廓,該方法取點效率高、誤差小,可減少工作空間求解過程的時間,為提高機器人加工效率提供了理論依據,為機器人運動學進一步研究奠定了基礎。
關鍵詞:SimMechanics;串聯機器人;約束;包絡;工作空間
中圖分類號:TP391.9
文獻標志碼:A
文章編號:1006-8228(2017)01-05-04
0.引言
工業機器人是一種可通過編程完成某些操作或移動作業的自動化裝備,具有高度柔性和開放性工業機器人集成現代化制造系統,極大提高了制造業自動化水平。隨著空間探索及應用的深入,空間機器人將扮演越來越重要的角色。在空間機器人的設計、規劃及控制過程中,工作空間都是一個需要考慮的重要問題,它是衡量機器人工作能力的一個重要的運動學指標。
目前,對于六自由度工業機器人工作空間的求解方法,主要有解析法、數值法、幾何法和Matlab仿真法。解析法是指,通過代數方法得到精確描述機器人末端位姿的解析方程,有兩種得到解析方程的途徑,一種是根據包絡理論確定工作空間的界限曲面,另一種是通過求解機器人的奇異曲面來確定工作空間的界限曲面。數值法是以極值理論和優化方法為基礎的,首先計算機器人工作空間邊界曲面上的特征點,用這些點構成機器人的邊界曲線,用這些邊界曲線構成的面表示機器人的邊界曲面。圖解法是指利用幾何作圖的方式,對機器人的操作機構按工作空間定義來求解,所得到的工作空間往往是工作空間的各類剖截面或剖截線。Maflab仿真法是利用Maflab軟件的機器人工具箱(Robotic Toolbox)對機器人進行建模和仿真求解機器人末端的工作空間。Matlab,SimMechanics仿真法使用正弦信號驅動機器人關節,來求解機器人末端的工作空間。
本文提出了一種基于SimMechanics的方法求解串聯機器人工作空間,根據機器人關節運動鏈特征,等角度步長約束關節轉動,獲取機器人末端點的位置,然后通過包絡法,快速地求解出工作空問的包絡線或包絡面,最終可近似得到機器人末端的工作空問。
1.工業機器人的運動學分析
六自由度串聯工業機器人機構具有六個旋轉自由度,前三個自由度用來確定位置,后三個自由度用來確定姿態。機器人末端的位姿通過D-H方法建立相鄰兩關節之間的空間轉換關系,用一個四階變換矩陣表示末端的手爪坐標系相對于基坐標系的齊次變換矩陣,建立操作臂末端的運動學方程。
2.工作空間的求解方法
工業機器人工作空間指機器人運動時手腕參考點或工具安裝點能夠到達的空間位置的集合。串聯工業機器人工作空間求解流程圖如圖1所示。
本文以六自由度工業機器人KUKA KR240 R2500為研究對象,機器人KUKA KR240 R2500的三維模型如圖2所示。
KUKA KR240 R250機器人的工作空間求解過程如下。
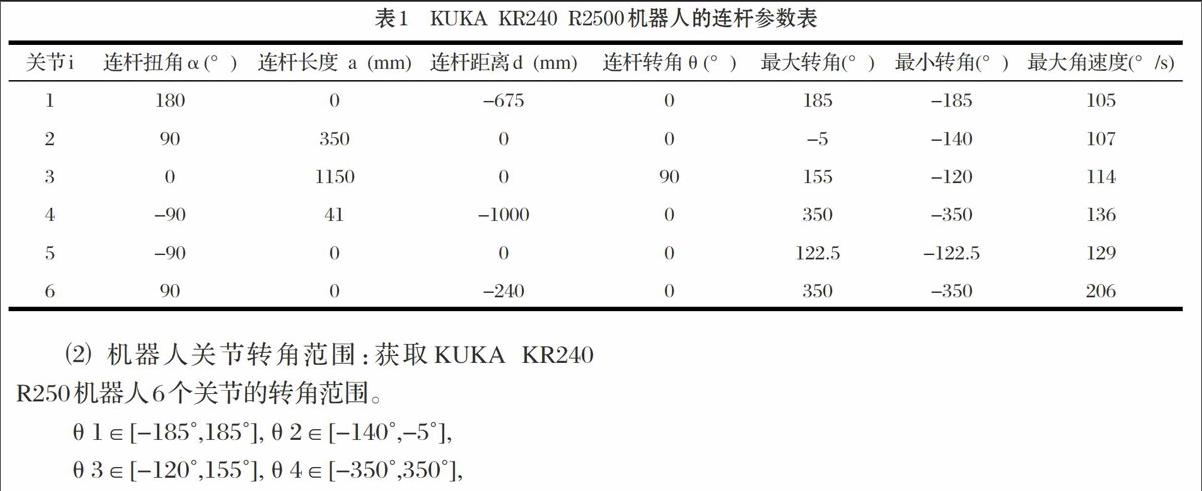
(1)機器人關節運動鏈特征:KUKA KR240 R250機器人是6個旋轉關節類型機器人。
(2)機器人關節轉角范圍:獲取KUKA KR240R250機器人6個關節的轉角范圍。
3.機器人在Matlab中建模并仿真
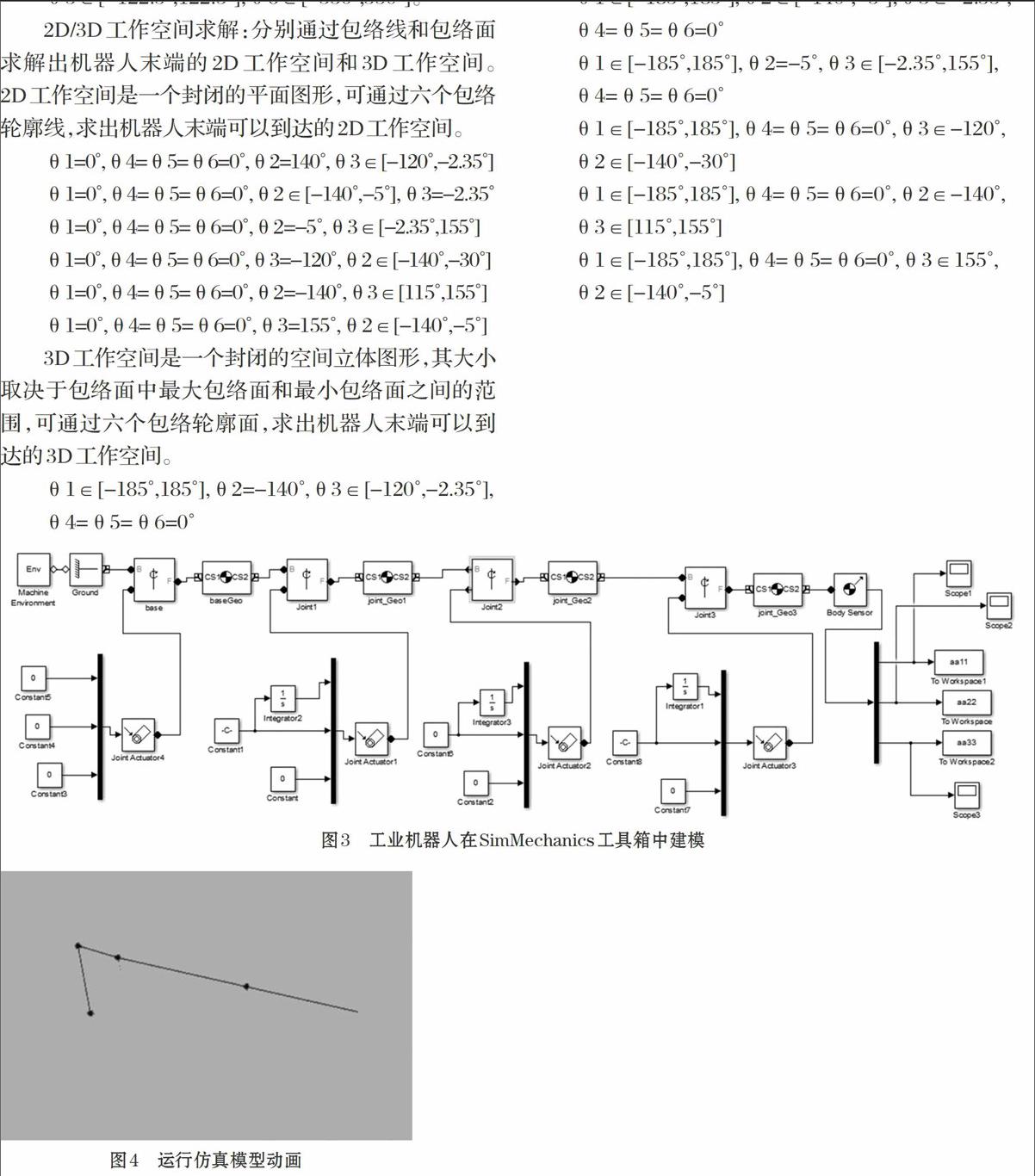
在Maflab軟件中的Simulink/SimMechanics工具箱中,對六自由度串聯工業機器人前三個關節和連桿進行建模并仿真。在SimMechanics工具箱中,根據機器^KUKA KR240 R250運動鏈,對機器人的base、joint]、joint2和joint3四個關節和連桿進行建模如圖3所示。
對Body模塊進行連桿參數配置,對Revolute模塊進行關節旋轉軸設置,對Joint Actuator模塊進行驅動項設置,對Body Sensor模塊配置為檢測連桿末端參考世界坐標系的位置。驅動信號配置為運動,Constant和Integrate模塊設置為角度信號、角速度信號和角加速度信號來驅動機器人關節轉動,Scope模塊顯示機器人末端的位置信息,To Workspace模塊輸出機器人末端的位置信息到工作區中。
角加速度的值設置為Orad,保證機器人關節轉動的角速度不變;角速度根據該關節在一個包絡過程中轉動的角度來設定一個定值,保證角度等步長改變;角度值設定為關節轉角范圍內某一個初值。這樣就可以產生等角度步長的點位,仿真時間設定為30秒,解算器選擇固定步長類型的二階常微分方程(改進的歐拉法ode2),該解算器產生的點位誤差較小,時間步長0.01秒,這時,在一次包絡中將會產生3000個點位。工業機器人基座和前三關節建模完成后,進行模型運動仿真,機器人模型的運動仿真動畫如圖4所示。
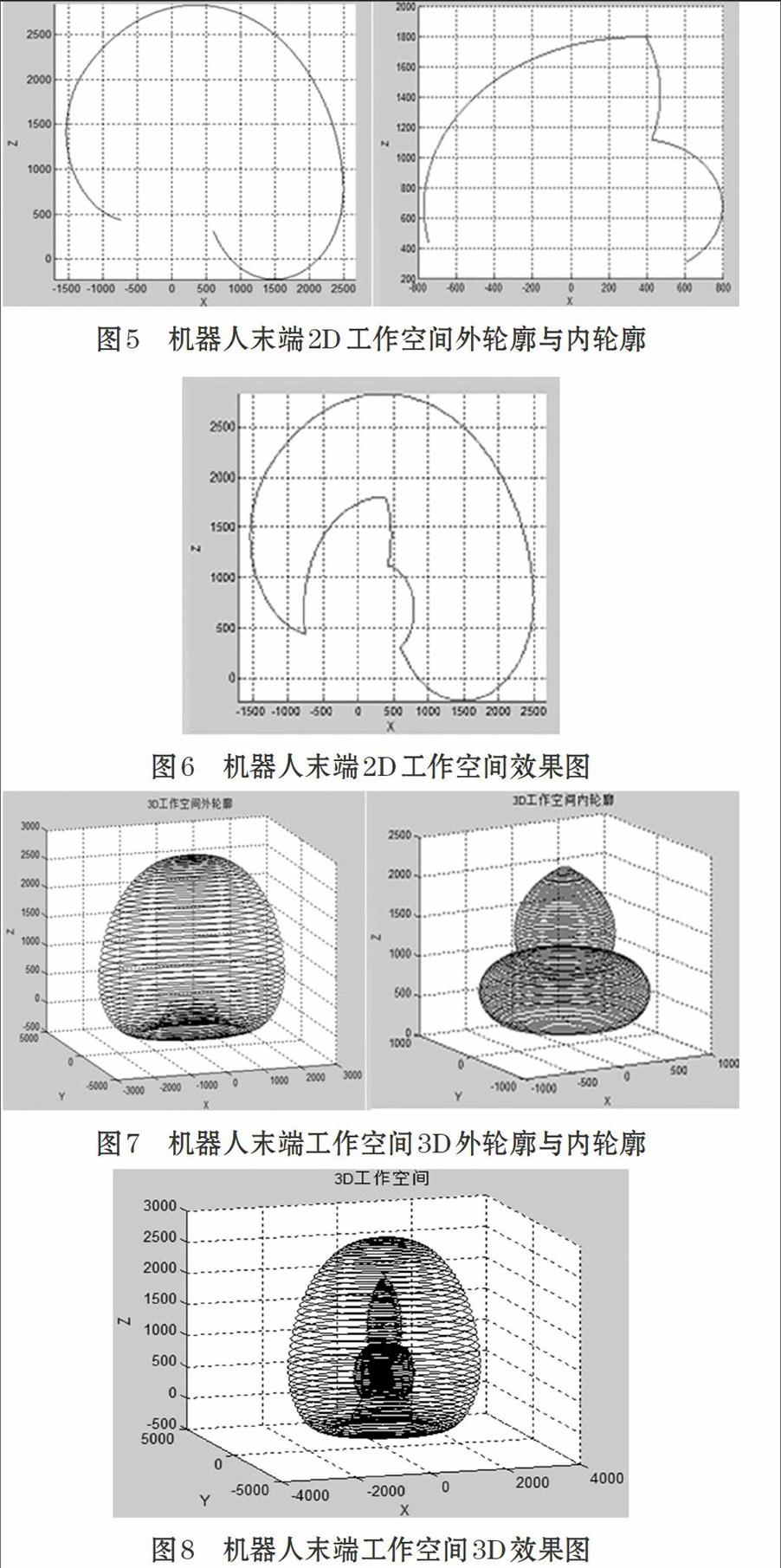
根據機器人2D工作空間求解步驟,六條包絡線描述了2D工作空間的外輪廓線和內輪廓線如圖5所示。
內外輪廓線之間的范圍構成機器人末端2D工作空間如圖6所示。
根據機器人3D工作空間求解步驟,六個包絡面描述了機器人末端3D工作空間的外輪廓面和內輪廓面如圖7所示。
機器人末端的3D工作空間大小取決于最大包絡面和最小包絡面之間的范圍,機器人末端3D工作空間如圖8所示。
從圖6和圖8可以看出,得到的包絡曲線和包絡曲面近似機器人末端工作空間,因此,當關節角度變化時的等步長足夠小,形成的末端點位均勻且足夠多時,就可以達到工作空間邊界的精度要求。因此,利用SimMechanics對工業機器人建模,通過生成多條包絡線和多個包絡面,然后由這些包絡線和包絡面構成機器人末端工作空間輪廓,近似表示出機器人末端所能達到的點位邊界,進而求解出機器人末端的工作空間。
4.小結
本文利用Matlab軟件中SimMechanics庫的功能,根據六自由度工業機器人的關節之間的運動鏈關系,在SimMechanics庫中對工業機器人進行建模,在工業機器人各關節的轉角范圍內,對模型中相應關節施加角度等步長驅動信號,驅動機器人關節的轉動,通過傳感器獲取機器人末端點的坐標位置,得出末端點的點云數據,然后對點云進行可視化,得到工業機器人的工作空間輪廓。該方法適用于串聯工業機器人,能夠快速精確求解機器人末端的工作空間,為機器人加工過程中工件的定位和機器人奇異位形的分析提供了理論依據,此研究之后,可以在機器人工作空間中,設計工件裝夾算法以避免奇異位形,提高機器^的加工效率。
