基于Arduino的機(jī)器手臂控制
2017-04-08 15:59:09熊曉松李朝朝
數(shù)字技術(shù)與應(yīng)用 2017年2期
熊曉松++李朝朝

摘要:當(dāng)前機(jī)械手臂得到廣泛的應(yīng)用,針對四自由度機(jī)械手臂系統(tǒng)進(jìn)行了研究與設(shè)計(jì),分析了機(jī)械手臂的機(jī)械結(jié)構(gòu)及控制系統(tǒng)。舵機(jī)是傳統(tǒng)的角度控制驅(qū)動(dòng)器,在機(jī)器人領(lǐng)域得到了廣泛應(yīng)用。采用Arduino控制板進(jìn)行舵機(jī)的控制,系統(tǒng)穩(wěn)定性高,可靠性強(qiáng),定位準(zhǔn)確可以滿足控制要求。
關(guān)鍵詞:機(jī)器手臂;Arduino;舵機(jī)
中圖分類號:TP398 文獻(xiàn)標(biāo)識碼:A 文章編號:1007-9416(2017)02-0003-01
Abstract:Today, robot arm is widely used ,the research and design about a four degrees freedom's arm are found. The Mechanical Structure and Control System are described. The servo is the tradional angle control driver and has been widely used in fields such as robotics. The Arduino is used to control the servo rotation, this system is a high stability , reliability and accurate control .
Key Words:manipulator;arduino;steeringgear
1 引言
1機(jī)器手臂是一種模擬人手臂而操作的自動(dòng)化機(jī)械,它可按固定的程序抓取、搬運(yùn)物件或操持工具完成某些特定操作。機(jī)器手臂可以代替人從事單調(diào)、重復(fù)或繁重的體力勞動(dòng),實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化,可以代替人在有害環(huán)境下的手工操作,改善勞動(dòng)條件,保證人身安全,目前廣泛應(yīng)用在工業(yè)自動(dòng)化生產(chǎn)線上,如何有效的控制機(jī)械手臂是當(dāng)前的熱點(diǎn)之一。
Arduino是一個(gè)開源的硬件平臺,該平臺由硬件部分和軟件兩部分組成,其中硬件包括單片機(jī)、電路板等,軟件主要是以C/C++語言為基礎(chǔ)的IDE集成開發(fā)環(huán)境,可以快速的開發(fā)自己的項(xiàng)目。它可以便捷地讀取模擬信號,控制LED燈亮度、電機(jī)的轉(zhuǎn)速等,也可以通過USB接口進(jìn)行編程和PC機(jī)通信等。利用Arduino單片機(jī)作為控制器控制舵機(jī)轉(zhuǎn)動(dòng),從而實(shí)觀對機(jī)器手臂的各種操作[1,2,3]。
2 設(shè)計(jì)方案
機(jī)器手臂一般由執(zhí)行機(jī)構(gòu)、控制系統(tǒng)、驅(qū)動(dòng)系統(tǒng)三個(gè)部分組成。執(zhí)行機(jī)構(gòu)由手腕、機(jī)座組成,是聯(lián)接手臂與末端執(zhí)行器的部件,用以調(diào)整末端執(zhí)行器的方位和姿態(tài)。手臂是支承手腕和末端執(zhí)行器的部件。它由動(dòng)力關(guān)節(jié)和連桿等組成,用來改變末端執(zhí)行器的位置。機(jī)座是機(jī)器手臂的基礎(chǔ)部件,并承受相應(yīng)的載荷,機(jī)座分為固定式。
控制系統(tǒng)以Arduino單片機(jī)為核心控制器完成機(jī)器手臂控制,實(shí)現(xiàn)四自由度機(jī)器手臂對貨物的抓取;對機(jī)器手臂建立空間模型,確定規(guī)定動(dòng)作控制要求;控制各功能電路,驅(qū)動(dòng)電路等;根據(jù)機(jī)器手臂各關(guān)節(jié)動(dòng)作要求,控制手臂動(dòng)作行程,實(shí)現(xiàn)手臂四自由度規(guī)定動(dòng)作。
驅(qū)動(dòng)系統(tǒng)通過輸出PWM波的實(shí)現(xiàn)對舵機(jī)轉(zhuǎn)動(dòng)的控制,進(jìn)而實(shí)現(xiàn)各個(gè)關(guān)節(jié)的位置控制。
2.1 機(jī)械設(shè)計(jì)
隨著制造工業(yè)的發(fā)展需要,對機(jī)器手臂的自由度,精確度,運(yùn)行的平穩(wěn)性要求越來越高,機(jī)器手臂向多自由度,高速度,高精確度發(fā)展。齒輪式的機(jī)器手臂具有結(jié)構(gòu)簡單,易于安裝與拆卸;重量輕,關(guān)節(jié)轉(zhuǎn)動(dòng)的慣性小、靈活性強(qiáng)等優(yōu)點(diǎn),機(jī)器手臂采用齒輪式(舵機(jī)驅(qū)動(dòng)方式)。齒輪式機(jī)器手臂具有傳動(dòng)精度高、體積小、速度較快及運(yùn)行平穩(wěn)等優(yōu)點(diǎn)。
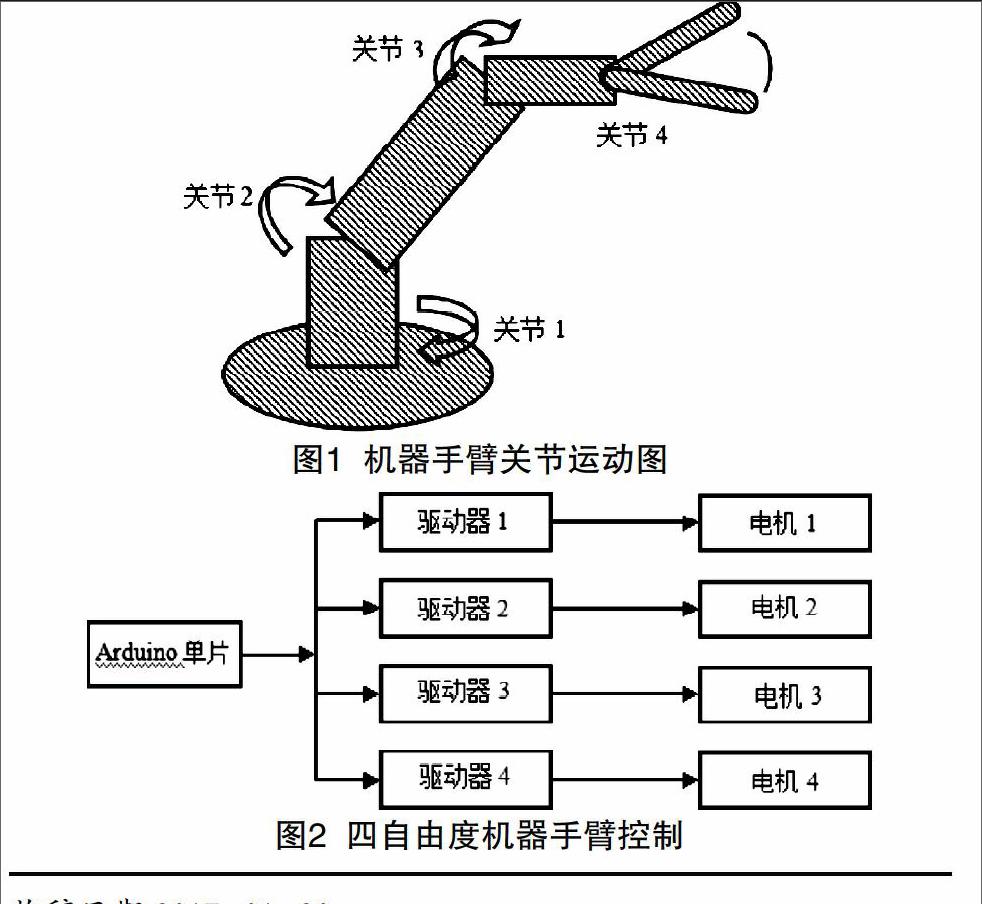
實(shí)驗(yàn)的機(jī)器手臂為四自由度,四自由度機(jī)器手臂可采用四個(gè)舵機(jī)控制,如圖1所示,舵機(jī)1控制底座,實(shí)現(xiàn)自由旋轉(zhuǎn),舵機(jī)2控制機(jī)器手臂上下運(yùn)動(dòng),舵機(jī)3控制末端機(jī)械爪的水平傾角,舵機(jī)4控制機(jī)械爪的開合,用于抓取物件。
本機(jī)器手臂各關(guān)節(jié)的最大運(yùn)動(dòng)范圍:如圖1所示。
關(guān)節(jié)1(舵機(jī)1)底座的轉(zhuǎn)動(dòng)范圍受舵機(jī)極限轉(zhuǎn)動(dòng)范圍的限制為-90°~+90°。
關(guān)節(jié)2(舵機(jī)2)用于平舉最大的轉(zhuǎn)動(dòng)為最低0°,最高90°。
關(guān)節(jié)3(舵機(jī)3)機(jī)械爪傾角的控制最低為-90°,最高90°。
關(guān)節(jié)4(舵機(jī)4)機(jī)械爪的開合,最小(閉合)0°,最大(張開)90°。
2.2 控制系統(tǒng)
以Arduino單片機(jī)為控制核心,控制機(jī)器手臂協(xié)調(diào)運(yùn)動(dòng)。機(jī)械手臂具有四個(gè)關(guān)節(jié),每個(gè)關(guān)節(jié)可以自由轉(zhuǎn)動(dòng)相應(yīng)角度,手臂轉(zhuǎn)動(dòng)采用4臺舵機(jī)驅(qū)動(dòng),可以完成點(diǎn)對點(diǎn)的夾取物件的簡單動(dòng)作。利用arduino單片機(jī)本身所帶的PWM口產(chǎn)生波形,編寫控制機(jī)器手臂的動(dòng)作程序,實(shí)現(xiàn)對舵機(jī)的控制[4]。系統(tǒng)控制圖如圖2所示。
為了設(shè)計(jì)的方便,控制方式采用點(diǎn)位控制。通過分別控制舵機(jī)的正反轉(zhuǎn)來確定末端執(zhí)行器在空間上的具體位置。舵機(jī)不是同時(shí)控制,因此不存在相互間的干擾,從而增強(qiáng)了整個(gè)系統(tǒng)的穩(wěn)定性。基座部分做為腰關(guān)節(jié)裝有舵機(jī)M1,控制機(jī)器手臂旋轉(zhuǎn);肩M2通過齒輪傳動(dòng)控制大臂旋轉(zhuǎn),基座與大臂底座用軸承連接;大臂座裝有舵機(jī)M3,通過齒輪、傳動(dòng)控制小臂的旋轉(zhuǎn)擺動(dòng);末端執(zhí)行器部分裝有舵機(jī)M4,同樣通過齒輪、絲桿傳動(dòng)控制末端執(zhí)行器的移動(dòng)。控制主程序流程圖如圖3所示。
3 結(jié)語
經(jīng)過實(shí)驗(yàn)的測試表明,采用Arduino可以實(shí)現(xiàn)對舵機(jī)的正反轉(zhuǎn)的控制,以及加減速的控制,可滿足對機(jī)械手臂的控制。
參考文獻(xiàn)
[1]蔡睿妍.基于Arduino的舵機(jī)控制系統(tǒng)設(shè)計(jì)[J].計(jì)算機(jī)工程應(yīng)用技術(shù).2012.8(15):3719-3721.
[2]黃麗雯,韓榮榮,宋江敏.基于Arduino/Android的語音控制小車設(shè)計(jì)[J].實(shí)驗(yàn)室研究與探索.2015,34(12):53-56.
[3]鄭昊,鐘志峰,郭昊,許駿.基于Arduino/Android的藍(lán)牙通信系統(tǒng)設(shè)計(jì)[J].物聯(lián)網(wǎng)技術(shù).2012(5):50-51.
[4]王效華,牛思先.基于單片機(jī)PWM控制技術(shù)的實(shí)現(xiàn)[J].武漢理工大學(xué)學(xué)報(bào)2010,32(1):94-98.
