GNSS-R土壤濕度估算體系架構研究與初步實現
2017-04-17 01:33:36李偉陳秀萬彭學峰肖漢
自然資源遙感 2017年1期
李偉, 陳秀萬, 彭學峰, 肖漢
(北京大學地球與空間科學學院,北京 100871)
GNSS-R土壤濕度估算體系架構研究與初步實現
李偉, 陳秀萬, 彭學峰, 肖漢
(北京大學地球與空間科學學院,北京 100871)
土壤濕度估算是全球導航衛星系統(global navigation satellite system,GNSS)反射信號遙感技術(GNSS reflectometry,GNSS-R)重要研究領域之一,近年來國內外學者在GNSS-R土壤濕度估算的理論可行性、信號接收處理方式、地基/空基試驗、估算模型及其精度評價等方面做了大量研究工作,對GNSS-R陸面遙感技術應用起到了積極的推動作用。在對GNSS-R土壤濕度估算的研究成果進行梳理的基礎上,建立GNSS-R土壤濕度估算體系架構,利用MATLAB進行土壤濕度估算模型集成與軟件實現。結合研究機構公開數據集對軟件中的估算模型和功能進行驗證,表明該軟件能夠為開展GNSS-R土壤濕度估算的數據處理、模型驗證等提供技術支持。
GNSS-R,土壤濕度,體系架構,MATLAB,模型集成
0 引言
利用L波段反射信號對土壤濕度敏感的特性,通過測量直射與反射信號參數間的變化,進行土壤濕度反演是GNSS-R技術陸面遙感應用的重要研究方向,具有傳統微波遙感技術手段在快速、實時、長時間序列獲取土壤濕度時空變化趨勢方面不可替代的優勢[1-2]。
自NASA利用延遲映射接收機(delay mapping receiver,DMR)開展了多次GNSS-R陸面遙感飛行試驗以來[3-4],國內外學者展開了一系列GNSS-R土壤濕度理論研究與試驗工作。Katzberg等[5]提出直射信號平滑校正法和校正直射、反射通道不一致的水面同步反射試驗法,經校正后得到的介電常數與實測土壤濕度計算值相近; Egido等[6]從試驗的角度評估了GNSS反射信號對土壤濕度和地上生物量變化的敏感性,表明左旋與右旋兩種極化反射率的比值可作為估算土壤濕度的穩定觀測量; 王迎強等[7]提出了土壤介電常數與水分之間的分段模型,并利用SMEX02數據進行了模型驗證; 萬瑋等[8]從極化理論入手,完成了圓極化和線極化接收方式下地表反射率與介電常數隱函數關系的推導,并通過地基GNSS-R土壤濕度數據對公式合理性進行驗證。以上研究成果是基于“反射率-介電常數-土壤濕度”這一過程進行的,即基于反射信號功率的土壤濕度估算方法。另一種方法為基于GPS信噪比(signal-to-noise ratio,SNR)觀測值中的多路徑反射分量進行土壤濕度反演。Larson等[9]利用常規GPS接收機記錄的SNR數據進行土壤濕度估算試驗,結果顯示GPS反射信號的相位變化與土壤濕度的實測值具有良好的相關性; Zavorotny等[10]建立了一個GPS直射與反射信號干涉的電動力學模型,可以產生并解釋試驗中相位和幅度變化等多路徑調制模式的主要特征; Chew等[11]利用上述模型進行模擬,以驗證試驗觀測中的經驗關系,表明相位與表層土壤濕度線性相關,是估算裸土地表土壤濕度的最佳度量。敖敏思等[12-13]在研究多路徑誤差反射模型的基礎上,實現了利用實測GPS SNR數據對土壤濕度變化趨勢的模擬,表明該方法能反映土壤濕度變化趨勢,證明利用指數函數能較好描述SNR多路徑延遲相位與土壤濕度之間的關系。
本文在介紹GNSS-R土壤濕度估算研究現狀,歸納GNSS-R土壤濕度估算研究方法的基礎上,建立了GNSS-R土壤濕度估算框架。通過模型算法的軟件實現,形成了GNSS-R土壤濕度估算軟件,為進一步開展GNSS-R土壤濕度估算模型驗證、數據處理與校正提供新的研究途徑。
1 原理與方法
1.1 基于反射信號功率的估算
利用反射信號功率進行土壤濕度估算方法的實質是基于雙基雷達方程的反演方法,由右旋圓極化天線接收直射信號,左旋圓極化天線接收反射信號,基于雙基雷達方程,從微波遙感機理出發構建土壤濕度模型,通過分析GNSS反射信號功率與直射信號在強度、頻率、極化等參數之間的變化,計算土壤介電常數,再根據土壤介電常數經驗模型反演得到土壤濕度[14-15]。其基本原理以GPS信號反演土壤水為例: 設GPS接收機接收到的反射信號功率為Pr,直射信號功率為Pd,地表反射率為Г,衛星掠射角為γ,則
Г=Pr/Pd,
(1)
在鏡像反射點處,滿足表面完全光滑,此時Г為
Г=|R(γ)|。
(2)
GPS直射信號為右旋圓極化,經地表反射后,右旋變為左旋圓極化的菲涅爾反射系數R(γ)可表示為垂直極化反射系數Rv(γ)和水平極化反射系數Rh(γ)的組合,即

(3)
(4)
(5)
式中ε為土壤和水分混合介質的復介電常數。土壤濕度的變化會改變ε的實部與虛部。對于GPS L波段微波信號,ε的虛部相對于實部而言對介電常數的貢獻微小,可以忽略不計,僅將ε的實部εr作為土壤的介電常數,即ε=εr。根據式(1)—(5),若通過GPS反射信號接收機測量得到反射信號功率Pr和直射信號功率Pd,便可計算出ε。
土壤介電常數模型建立了土壤介電常數與特定的土壤濕度之間的對應關系,其計算方法多采用成熟的經驗公式。本文以Hallikainen模型[16]為例,對于GPS L1波段微波頻率,ε可以用頻率為1.4 GHz條件下的經驗公式進行近似表達,即
(6)
式中:mv為土壤體積含水量,即土壤濕度;S和C為土壤質地參數。在已知S和C的情況下,可根據式(6)計算出ε。
顯然,上述模型中將土壤表面的入射、反射功率用GNSS接收機接收的直射信號功率、反射信號功率做了簡單的等值替換,這其中肯定存在誤差[17]。首先,在右旋圓極化天線接收直射信號時,存在多路徑效應的環境誤差,以及因接收電線的直射通道與反射通道存在器件特性不一致的系統誤差,因此必須對地表反射率中使用的直射功率值和反射功率值進行校正,通過校正得到準確的地表反射率。針對直射信號校正,在GPS信號接收時段內,影響GPS直射信號的功率因素主要包括多路徑效應和衛星高度角變化。在有效GNSS信號接收時段內,僅考慮多路徑效應產生的誤差時,可將測量得到的直射信號功率進行多項式擬合,得到校正后的直射信號功率。
針對反射信號主要體現在大氣對信號的影響方面,其校正方法是引入研究區域同步水面反射試驗進行校準,通過求得水面直射信號與反射信號的相關功率,得到一系列水面測量反射率,進而獲取反射率均值,得到研究區域的反射信號校正系數[5]。
反射信號校正為

(7)

利用校正后的直射信號與反射信號功率,由式(1)可以建立基于信號校正后的GNSS-R土壤濕度估算模型。
當植被覆蓋地表時,植被覆蓋對土壤微波散射信號有衰減作用,使得土壤濕度的獲取更加復雜,前述理論與算法均是針對裸土地表建立的,而在實際應用中植被覆蓋地表的土壤濕度反演更具意義。因此,針對植被覆蓋地表,需考慮對裸土地表模型進行修正,建立植被覆蓋地表的土壤濕度估算方法。根據Ulaby等[18]的研究結論,植被層對土壤表面反射率有衰減作用,即區域內歸一化差分植被指數(normalizeddifferencevegetationindex,NDVI)值越大,GPS接收天線接收到的土壤反射越少。因此,針對中/高植被覆蓋區域,研究考慮結合NDVI,提出反射信號校正系數的植被衰減因子,對反射信號在基于同步水面反射試驗校準方法后的結果開展進一步校正[19]。
P″r=(fcVc)Pr,
(8)
Vc={1+[(1-fc)(1-aNDVI)]}/fc。
(9)
將植被的影響Vc考慮為線性變化,其中,a為線性變化系數,且0 ≤a≤ 1,則得到
P″r={1+[(1-fc)(1-aNDVI)]}/Pr。
(10)

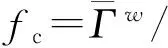
基于以上分析形成基于反射信號功率的土壤濕度估算處理流程如圖1所示。
圖1 NDVI校正GNSS信號的處理流程
1.2 基于信噪比(SNR)數據的估算
由于GNSS衛星信號存在多路徑誤差,且這種誤差在當衛星高度角較小時更為明顯,即存在直射信號和反射信號的干涉效應,因此,Larson等[9]提出了一種利用GPS 信噪比(signal-to-noise,SNR)的相位估算土壤濕度的新方法,通過測量干涉效應度量(相位、振幅、頻率等)進行地表參數估算,其方法為從SNR中去除直射分量,保留多路徑反射分量,采用譜分析的方法對多路徑反射分量的角頻率進行估算,然后根據正弦函數的公式,采用最小二乘擬合方法計算出幅度與相位,進而可以根據相位與實測土壤濕度建立的經驗線性關系估算土壤濕度。
根據Larson提出的模型,SNR信號功率可以描述為

(11)
式中:A為信號振幅;h為天線高度;λ為GPS信號載波波長;E為衛星高度角;Φ為相位。
根據式(11)可以采用最小二乘擬合方法計算出Φ,進而可以根據線性關系估算土壤濕度mv。此處,Φ與mv的線性關系可以描述為
mv=(minmv+1.48Φ)/100,
(12)
式中minmv為土壤濕度基數。驗證本算法時從STATSGO(soils data for the conterminous united states derived from the NRCS state soil geographic data base)數據庫中計算得到。
通過基于反射信號功率的土壤濕度估算方法的研究可知,植被覆蓋會對土壤表層的反射信號參數產生衰減作用,即植被覆蓋會對GPS SNR相位估算產生影響,造成GPS SNR信號相位值小于實際值。本文探索了利用植被水分(vegetation water content,VWC)修正GPS SNR 信號的方法,利用GPS SNR信號振幅和MODIS數據計算的歸一化差分水體指數(normalized difference water index,NDWI)聯合獲取VWC,從原始的GPS SNR信號中分離出土壤濕度的貢獻部分,最后再利用正弦函數進行土壤濕度估算[19]。
植被衰減效應是植被不透明度和信號入射角的函數,即
L=τesecα,
(13)
τ=bvwc,
(14)
式中:L為植被衰減因子;τ為植被不透明度;α為入射角;b為常數,取決于植被類型;vwc為植被水分。因此,在已知植被水分的條件下,可以計算出植被衰減因子。對于GPS SNR信號來說,
(15)
因此,可將SNR信號中土壤濕度的貢獻SNRsoil分離出來,然后再利用裸土模型進行土壤濕度估算。該算法的精度在很大程度上取決于植被水分的估算精度。
基于以上分析形成基于SNR數據的土壤濕度估算處理流程如圖2所示。
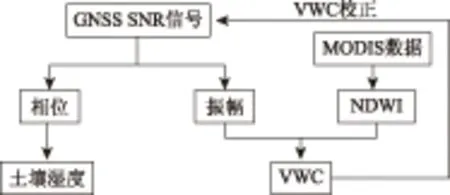
圖2 VWC校正GNSS SNR信號的處理流程
2 GNSS-R 土壤濕度估算體系架構的建立及軟件實現
通過前述對GNSS-R土壤濕度估算原理與方法的分析,當前研究主要集中在2種模式下的理論可行性、信號反射模型與極化方式、估算精度及地表環境(裸土、植被覆蓋)對估算精度的影響及校正等方面,尚未形成一個初步的估算技術體系及相對完善的算法軟件。基于此,本文試圖通過對算法原理的分析與實現,形成一個GNSS-R土壤濕度估算框架并進行軟件實現。
萬瑋等[20]根據信號接收模式與數據處理方式的不同,將基于反射信號功率的估算方法定義為雙天線模式,基于信噪比數據的估算方法定義為單天線模式。
本文將這種定義方式引入到構建GNSS-R土壤濕度估算的體系架構中,以此為基礎給出GNSS-R土壤濕度估算研究體系架構。雙天線模式采用“反射率-介電常數-土壤濕度”這一過程進行土壤濕度估算,此模型在地基、裸土情況下已較為成熟,但沒有涉及植被覆蓋、機載條件下模型適應性問題。當植被覆蓋觀測地表時,植被對GNSS信號相應地具有衰減作用,且當植被覆蓋度較大時,到達接收機的反射信號含有植被反射的部分,需考慮對傳統模型進行植被衰減校正,提出了基于裸土和植被覆蓋情況下的信號校正方法; 對于單天線模式,傳統的干涉測量模型沒有考慮植被覆蓋情況下對反射信號的衰減作用,因此植被覆蓋區域需要進行植被衰減校正,另外對于單天線模式高植被覆蓋情況下,干涉參量振幅會達到飽和,因此,單天線模式多用于中植被覆蓋情況。基于以上分析,按照土壤濕度估算方式并顧及地表植被覆蓋的條件下,本文初步形成如圖3所示的GNSS-R土壤濕度估算體系。

圖3 GNSS-R土壤濕度估算框架
Fig.3 Frame for GNSS-R soil moisture estimation
圖3顯示,在GNSS-R土壤濕度估算框架中包括雙天線模式和單天線模式,在每種模式下包含裸土地表模型和顧及植被覆蓋條件下的校正模型。通過對GNSS-R土壤濕度估算體系的構建,對已有成果及其研究趨勢進行梳理,意在為散射模型、估算模型及數據處理方法進一步深入研究奠定基礎。根據所建立的GNSS-R估算土壤濕度體系,結合MATLAB對估算算法進行了軟件實現,最終形成了GNSS-R土壤濕度估算軟件,其界面如圖4所示。
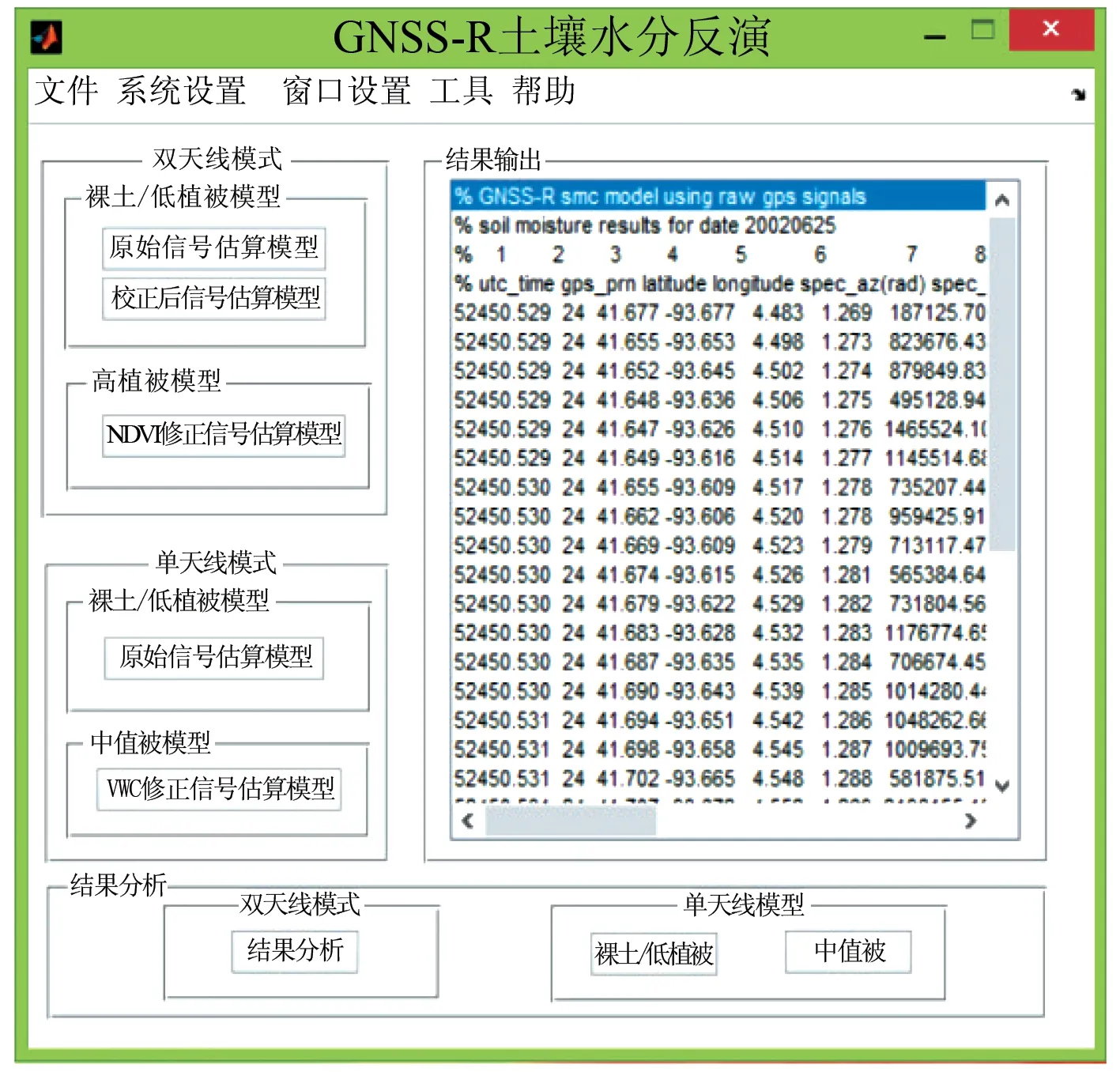
圖4 軟件界面
本軟件包括雙天線模式、單天線模式下估算土壤濕度的功能,并分別實現了對雙/單天線模式下模型計算結果的對比分析。在雙天線模式下包括裸土/低植被和高植被模型的土壤濕度估算及相關對比結果輸出; 在裸土/低植被模型中采用原始GNSS-R信號的土壤濕度估算模型和校正信號估算模型。在估算軟件中,原始信號估算模型主要起參考作用,與校正信號以及基于NDVI修正信號估算模型結果進行對比分析、模型精度評價,分析過程將在雙天線模式結果分析中執行。在單天線模式下包括裸土/低植被和中植被模型,2種模型均以長時間序列數據作為處理對象,計算到某站點觀測范圍內的逐日土壤濕度估算結果。為有效進行對比分析,中植被覆蓋地表應選取植被生長期的數據,以在估算模型結果中進行對比分析和精度評價。
3 試驗數據及結果分析
3.1 試驗數據
為驗證本文提出的GNSS-R土壤濕度估算框架及軟件校正模型功能及其可行性,采用的試驗數據如表1所示。
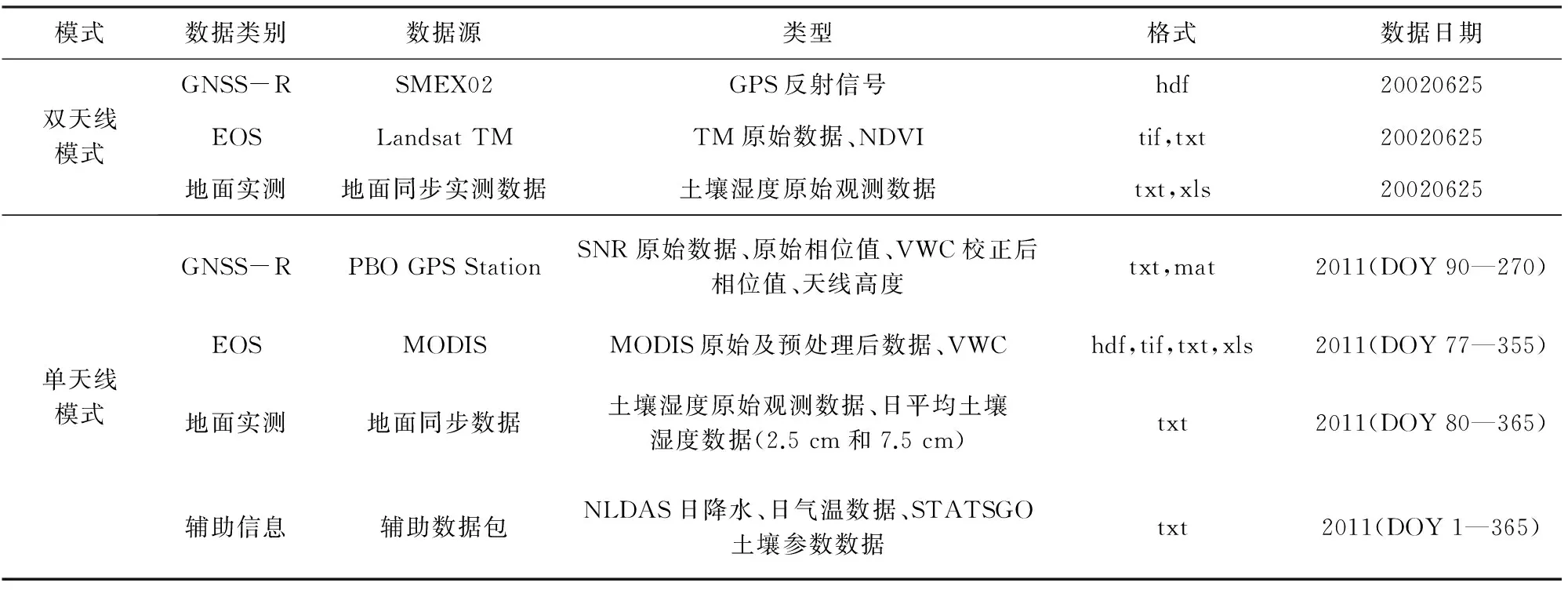
表1 數據源
3.2 結果分析
3.2.1 雙天線模式
將SMEX02的GPS反射信號數據及相關輔助數據利用雙天線模式下的土壤濕度估算模型分別得到相同地塊的原始信號估算模型土壤濕度、校正信號估算模型土壤濕度和NDVI修正信號估算模型土壤濕度結果,并結合地面同步實測數據,將裸土/低植被和高植被覆蓋條件下模型估算土壤濕度結果進行了對比分析,軟件運行界面及土壤濕度估算結果如圖5所示。
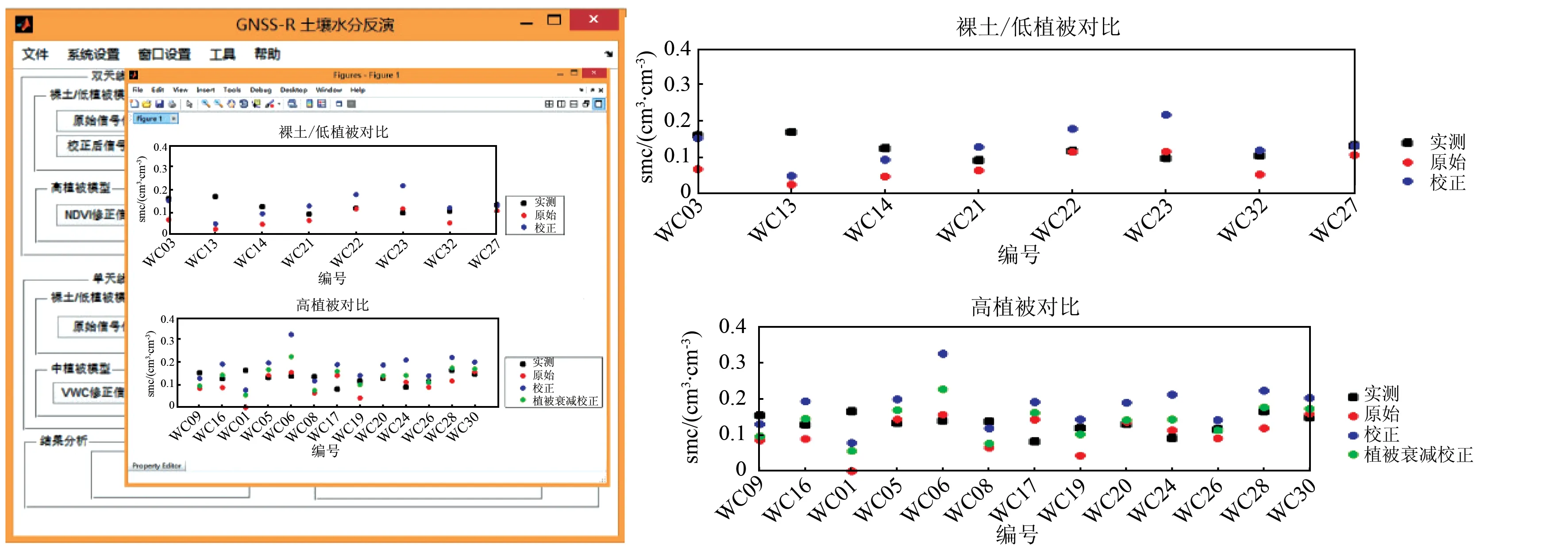
(a) 軟件運行界面 (b)不同植被條件下實測、原始信號、校正信號、NDVI修正信號結果
圖5 雙天線模式估算結果對比
Fig.5 Results comparison of the double-antenna pattern
在圖5(b)的裸土/低植被對比圖中,校正后信號土壤水估算結果普遍高于原始信號土壤濕度估算結果,這說明GPS信號功率校正后計算的土壤介電常數高于校正前的,利用SMEX02數據集中同步水面反射試驗提供的GPS直射和反射信號觀測結果得到的校正系數均值都大于1,說明模型估算結果與采集數據結果基本一致。與地面實測同步土壤濕度值相比,信號校正模型土壤濕度值與實測值相比存在偏高和偏低2種情況,由于校正系數大于1,校正后反射率整體高于校正前,因此理論上土壤濕度估算結果也應該比校正前偏高,所以與原始信號土壤濕度表現出一致的趨勢。
在圖5(b)的高植被對比圖中,加入植被衰減因子后土壤濕度估算結果與實測值基本吻合,經修正后的土壤濕度估算結果更接近于整體實測值。對于部分誤差較大的情況,其原因是GPS測量反射率較小,但經校正后仍有較大誤差。通過對同步實測數據、原始信號、校正后信號和NDVI進行高植被覆蓋地表的模型結果進行比較,其校正精度進一步提高,初步實現了雙天線模式下結合不同植被覆蓋GNSS-R估算土壤濕度軟件體系。
3.2.2 單天線模式
1) 裸土/低植被模型。單天線模式算法的優勢在于基于地基連續觀測,可以反映區域內時間序列水分變化情況和監測區域內每天的土壤濕度變化情況。本文利用板塊邊界探測(plate boundary observatory,PBO) GPS 一個站點數據對單天線算法進行驗證。結果如圖6所示。
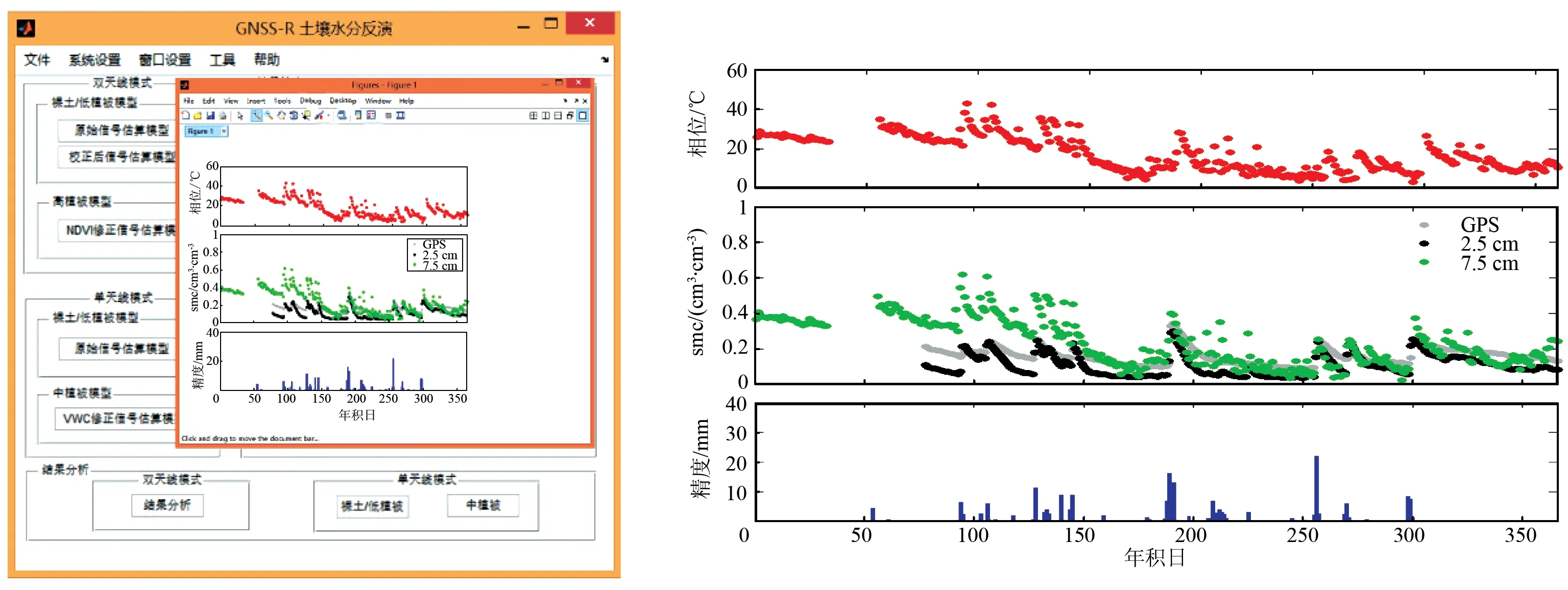
(a) 軟件運行界面 (b) 裸土/低植被條件下2.5 cm,7.5 cm處與實測值
圖6 單天線模式裸土/低植被估算結果對比
Fig.6 Results comparison of the Single-Antenna Pattern
在圖6中,利用裸土/低植被模型對土壤濕度進行估算,結合地面在2.5 cm和7.5 cm處逐日土壤濕度實測數據及降雨量分布情況,形成站點在2011年土壤濕度估算結果對比圖。在圖6(b)中,橫軸表示年積日,表示一個觀測年份內研究區域的逐日土壤濕度變化情況,最上層為干涉測量相位值(℃),中間層為體積土壤濕度計算結果以及實測值(cm3),最下層為降雨量信息(mm)。從圖中可知,相位的變化趨勢可以直接反映土壤濕度的變化,但利用單天線模式原始信號估算模型,其估算結果與實測數據存在較大誤差。
2)中植被模型。針對得到的土壤濕度能夠反映出研究區域內長時間序列的土壤濕度變化情況,利用具有植被覆蓋的PBO長時間序列站點數據,結合從MODIS數據提取的能夠反映植被含水量變化特征的NDWI參數,進行了GPS SNR數據的修正,然后進行中植被覆蓋的站點區域土壤濕度估算與地面在2.5 cm和7.5 cm處逐日土壤濕度實測數據及降雨量分布情況的對比研究,驗證VWC修正信號估算方法的可行性,結果如圖7所示。
(a) 軟件運行界面 (b) 中植被條件下2.5 cm和7.5 cm處與實測值
圖7 單天線模式中植被估算結果對比
Fig.7 Results comparison of the single-antenna pattern
從圖7中可以看出,通過在植被生長周期內土壤濕度的估算結果與實測值的對比,經過MODIS VWC植被衰減修正后,SNR相位的變化趨勢得以正確歸位,能夠得到比較精確的土壤濕度估算結果,較正確地反映了研究區域逐日土壤濕度變化趨勢。
4 結論
本文在現有GNSS-R土壤濕度估算方法研究進展的基礎上,對國內外學者采用的估算思路進行梳理。針對GNSS-R土壤濕度估算方法體系及邏輯思路的不同,以雙天線模式和單天線模式為基礎,進行了GNSS-R土壤濕度估算體系構建,并形成GNSS-R土壤濕度估算軟件,為GNSS-R土壤濕度估算的結果輸出、精度評價提供了一個可行的方案。結合SMEX02和PBO GPS站點數據,對估算結果與地面實測數據進行對比、分析圖,驗證了估算模型算法軟件集成的可行性。
通過對2種估算模型軟件集成,并利用公開數據集的驗證對比分析,得出結論如下:
1) 植被覆蓋情況對土壤濕度估算模型的計算結果具有較大影響,考慮不同植被覆蓋情況下的模型校正是必要的,結合不同的植被參數可以提高估算精度。
2) 利用GPS SNR可以很好地與土壤水分建立聯系,尤其對于區域的長時間序列土壤濕度監測,能夠提供一種經濟、適用、便捷的觀測模式。
3) 土壤濕度估算模型能夠獲取不同植被條件下的土壤濕度值及長時間序列的變化趨勢,但同時也存在著一定的估算誤差,說明需進一步對反演模型進行擴展,考慮不同的地表環境下模型的普適性。
4)根據觀測模式分為雙天線與單天線2種理論分支是對現有的GNSS-R觀測土壤水分方法的一種分類,涵蓋了該領域的主流研究方式。隨著國內外學者的深入研究,新出現的理論方法既可以通過細化分類的方式納入其中,也可以考慮提出新的分類方法。總之,根據觀測模式的分類是對目前GNSS-R觀測土壤水分研究內容的有益的、開放式的梳理性嘗試,本文通過軟件實現的方式對以上體系架構研究的可行性做出了技術支持,為GNSS-R陸面遙感提供了一種集成化數據處理手段,為后續估算方法優化及模型實現提供了一定的研究基礎。
志謝: 清華大學水沙科學與水利水電工程國家重點實驗室萬瑋博士后在本文軟件算法設計中提供了寶貴意見及悉心指導,在此表示衷心感謝。
[1] 陳書林,劉元波,溫作民.衛星遙感反演土壤水分研究綜述[J].地球科學進展,2012,27(11):1192-1203 Chen S L,Liu Y B,Wen Z M.Satellite retrieval of soil moisture:An overview[J].Advances in Earth Science,2012,27(11):1192-1203.
[2] 李黃,夏青,尹聰,等.我國GNSS-R遙感技術的研究現狀與未來發展趨勢[J].雷達學報,2013,04:389-399. Li H,Xia Q,Yin C,et al.The current status of reasearch on GNN-R remote sensing technology in China and future developmeng[J].Journal of Radars,2013,04:389-399.
[3] Masters D,Zavorotny V,Katzberg S,et al.GPS signal scattering from land for moisture content determination[C].Geoscience and Remote Sensing Symposium,2000.Proceedings.IGARSS 2000.IEEE 2000 International.IEEE,2000,7:3090-3092.
[4] Masters D,Axelrad P,Katzberg S.Initial results of land-reflected GPS bistatic radar measurements in SMEX02[J].Remote Sensing of Environment,2004,92(4):507-520.
[5] Katzberg S J,Torres O,Grant M S,et al.Utilizing calibrated GPS reflected signals to estimate soil reflectivity and dielectric constant:Results from SMEX02[J].Remote Sensing of Environment,2005,100(1):17-28.
[6] Egido A,Paloscia S,Motte E,et al.Airborne GNSS-R polarimetric measurements for soil moisture and above-ground biomass estimation[J].Selected Topics in Applied Earth Observations and Remote Sensing,IEEE Journal of,2014,7(5):1522-1532.
[7] 王迎強,嚴衛,符養,等.機載GPS反射信號土壤濕度測量技術[J].遙感學報,2009,13(4):678-685. Wang Y Q,Yan W,Fu Y.et al.Soil moisture determination of reflected GPS signals from aircraft platform[J].Journal of Remote Sensing,2009,13(4):678-685.
[8] 萬瑋,李黃,洪陽.作為外輻射源雷達的GNSS-R遙感多極化問題[J].雷達學報,2014,06:641-651. Wan W,Li H,Hong Y.Issues on multi-polarzation of GNSS-R for passive radar detection[J].Journal of Radars,2014,06:641-651.
[9] Larson K M,Small E E,Gutmann E D,et al.Using GPS multipath to measure soil moisture fluctuations:Initial results[J].GPS Solutions,2008,12(3):173-177.
[10]Zavorotny V U,Larson K M,Braun J J,et al.A physical model for GPS multipath caused by land reflections:Toward bare soil moisture retrievals[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing,2010,3(1):100-110.
[11]Chew C C,Small E E,Larson K M,et al.Effects of near-surface soil moisture on GPS SNR data:Development of a retrieval algorithm for soil moisture[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(1):537-543.
[12]敖敏思,胡友健,劉亞東,等.GPS信噪比觀測值的土壤濕度變化趨勢反演[J].測繪科學技術學報,2012,29(3):140-143. Ao M S,Hu Y J,Liu Y D,et al.Inversion of soil moisture fluctuation based on signal-to-noise ration of global positioning system[J].Journal of Geomatics Science and Technology,2012,29(3):140-143.
[13]敖敏思,朱建軍,胡友健,等.利用SNR觀測值進行GPS土壤濕度監測[J].武漢大學學報:信息科學版,2015,40(1):117-120. Ao M S,Zhu J J,Hu Y J,et al.Comparative experiments on soil moisture moitoring with GPS SNR observations[J].Geomatics and Information Science of Wuhan University,2015,40(1):117-120.
[14]嚴頌華,張訓械.基于GNSS-R信號的土壤濕度反演研究.電波科學學報,2010,25(1):8-13 Yan S H,Zhang X X.Retrieving soil moisture based on GNSS-R signals[J].Chinese Journal of Ratio Science(in Chinese),2010,25(1):8-13.
[15]宋學忠,徐愛功,楊東凱,等.GNSS反射信號在土壤濕度測量中的應用[J].測繪通報,2013,11:61-64 Song X Z,Xu A G,Yang D K,et al.Details of soil moisture measuring utilizing GNSS reflected signals[J].Bulletin of Surveying and Mapping,2013,11:61-64.
[16]Hallikainen M T,Ulaby F T,Dobson M C,et al.Microwave dielectric behavior of wet soil-Part 1:Empirical models and experimental observations[J].IEEE Transactions on Geoscience and Remote Sensing,1985,GE-23(1):25-34.
[17]毛克彪,王建明,張孟陽,等.GNSS-R信號反演土壤濕度研究分析[J].遙感信息,2009(3):92-96. Mao K B,Wang J M,Zhang M Y,et al.Research on soil moisture inversion by GNSS-R signal[J].Remote Sensing Information,2009(3):92-96.
[18]Ulaby F T,El-Rayes M A.Microwave dielectric spectrum of vegetation-Part two:Dual-dispersion model[J].IEEE Transactions on Geoscience and Remote Sensing,1987,GE-25(5):550-557.
[19]Wan W,Li H,Chen X W,et al.Preliminary calibration of GPS signals and its effects on soil moisture estimation[J].Acta Meteorologica Sinica,2013,02:221-232.
[20]萬瑋,李黃,洪陽,等.GNSS-R遙感觀測模式及其陸面應用[J].遙感學報,2015.19(6):882-893. Wan W,Li H,Hong Y,et al. Definition and application of GNSS-R observation patterns[J].Tournal of Remote Sensing,2015,19(6):882-893.
(責任編輯: 李瑜)
GNSS-R technique for soil moisture estimation: Framework and software implementation
LI Wei, CHEN Xiuwan, PENG Xuefeng, XIAO Han
(SchoolofEarthandSpaceSciences,PekingUniversity,Beijing100871,China)
Soil moisture content estimation is one of the important research fields in the GNSS-R (Global Navigation Satellite System Reflectometry, GNSS-R) land surface remote sensing. In recent years, many experts have done a lot of research on the theories of soil moisture estimation, receiving and processing of GNSS reflected signals, ground-based/air-borne experiment, estimation model and accuracy evaluation, which has greatly promoted the development of GNSS-R land surface remote sensing technique. Based on the previous research results, the authors built the framework of soil moisture estimation using GNSS-R and carried out the initial software implementation by integrating different estimation models. By verifying the models and functions of the software using public datasets for GNSS-R research, it is demonstrated that the software can provide effective technical support for GNSS-R data processing and model validation in soil moisture estimation.
GNSS-R; soil moisture; software implementation; MATLAB; model integration
10.6046/gtzyyg.2017.01.32
李偉,陳秀萬,彭學峰,等.GNSS-R土壤濕度估算體系架構研究與初步實現[J].國土資源遙感,2017,29(1):213-220.(Li W,Chen X W,Peng X F,et al.GNSS-R technique for soil moisture estimation:Framework and software implementation[J].Remote Sensing for Land and Resources,2017,29(1):213-220.)
2015-07-24;
2015-11-20
“十二五”民用航天預先研究項目資助。
李偉(1984-),男,博士研究生,主要研究方向為遙感信息工程。Email: wii_lee@126.com。
陳秀萬(1964-),男,博士生導師,主要研究衛星導航技術與位置服務(LBS)、遙感信息分析與處理、數字流域與智慧應急等。Email: xwchen@pku.edu.cn。
TP 79
A
1001-070X(2017)01-0213-08
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
