穿戴式跌倒檢測系統設計及算法研究
2017-04-18 03:38:27廣東工業大學自動化學院陳祥寶
電子世界 2017年1期
廣東工業大學自動化學院 陳祥寶
穿戴式跌倒檢測系統設計及算法研究
廣東工業大學自動化學院 陳祥寶
隨著老年人口的劇增,老齡化社會以及老年人的醫療保健問題已成為當今社會的突出問題。如何實現對老年人實行醫療監護,已經成為社會急需解決的問題。本系統設計的基于六軸傳感器的移動醫療智能監測系統,運用六軸傳感器得到人體跌倒時的準確數據,并對數據進行預處理,利用k近鄰算法得到被檢測者的身體狀態;運用GPS/GSM/GPRS對被監測的位置進行確定定位,并通過GPRS將跌倒信息通過服務器傳送到APP端,使得親屬可以快速準確的找到被監測者進行救治。本項目的技術創新點對于老年人的跌倒檢測具有很大的推動作用。
可穿戴式;K-D tree;跌倒檢測;APP;K近鄰算法
0 引言
根據國家統計局發的2015年國民經濟和社會發展統計公報顯示,2015年年末我國60周歲及以上人口數為22182萬人,占總人口比重為16.15%;65周歲及以上人口數為14374萬人,占比10.47%。也就是說,我國已經進入人口老齡化的時期。摔倒在年級較大的人群中比較常見,和對年輕人相比,對老年人的影響要大的多。根據國內外研究發現,在65周歲以上每年有30%的人發生過跌倒,并且隨著年齡的增長,這個數字也在不斷上升,在80周歲以上的老年人中,遇到跌倒的可能性甚至會達到一半。在美國,在70周歲以上老年人中,跌倒已經成為死亡的第六大原因,每年在跌倒傷害中花費超過2000億美元。所以對跌倒研究與預防是極為必要的,怎么減少跌倒導致的傷害已經成為國內外研究人員的一個研究焦點。
1 跌倒檢測系統設計
本文設計的跌倒檢測系統分為硬件系統和軟件系統,其整體設計框圖如圖1所示:
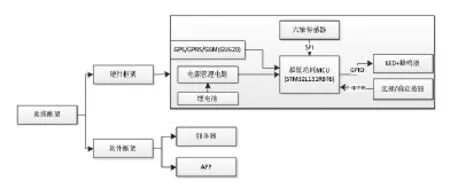
圖1 系統整體設計框圖
1.1 硬件框架
硬件部分主要是智能監護終端,功能主要為:實時地采集到用戶的生理指標、人體姿態、用戶所在地理位置等數據,通過移動網絡,將數據傳輸到社區醫療監護中心、用戶及其監護人的手機,以實現對用戶的日常健康進行監護。該終端由主控芯片STM32L151RBT6、鋰電池電源管理模塊、微處理器、GPS/GSM/GPRS、六軸傳感器、蜂鳴器、選擇/確定按鈕等組成。
該部分主要負責對人體運動產生的加速度、角速度等數據采集,并具有地理信息獲取和遠程無線通信等功能。當檢測到用戶的生理指標或人體姿勢發生異常時(如跌倒等),終端上的馬達振動器會震動報警,LED顯示屏提示用戶注意調節生理狀態。同時將報警信號傳送到遠程服務器端,由遠程服務端統一收集分派到社區醫療服務中心以及用戶監護人的手機,以便通知社區醫療工作人員或監護人提供及時的救治。此外終端還具有主動取消報警、電量監測和低電量提示、手機防丟、免密碼手機解鎖、運動檢測等其他輔助功能。
1.2 軟件框架
1.2.1 遠程服務器
服務器端設計是基于Visual studio 2013開發環境利用MFC構架開發,提供系統錄入,用戶管理,接收分派警報消息。服務器將事件相關信息,包括跌倒事件、發生人員、跌倒時間、發生地點、跌倒事件的可信程度和預處理方案等打包發送到社區醫療中心和監護人手機處。該平臺能夠根據跌倒事件信息做出實施救助的方案,并立即展開救助活動,最大程度地對需要救助的人員實施最快的救助。
1.2.2 手機客戶端APP設計
手機客戶端主要負責從服務器將用戶的數據讀取出來,解析服務氣端傳送的經緯度信息,并以圖形界面的形式顯示。手機客戶端采用高德地圖來實時顯示用的地理位置。
2 跌倒檢測算法研究
人體結構具有復雜性,導致人體的運動行為具有多樣性,在算法研究之前,我們需要對人體的日常行為和具體的跌倒行為進行數據采集分析,進而從中提取可以區分跌倒和類跌倒行為的特征。為跌倒算法的判斷提供簡便性。
2.1 跌倒行為分析
本文主要是針對老人的跌倒進行研究,根據大量資料研究表明,老人跌倒絕大多數是處于從站立狀態到臥躺的一個過程。在跌倒發生時,通過本設計提供的六軸傳感器可以獲得佩戴者在這一狀態的加速度和角速度的變化過程。不同于其他的日常活動,在跌倒過程中,加速度和角速度數據會在短時間急劇增加,為跌倒特征的提取提供了依據。
由于系統是面向老年人的醫療監護系統,可以忽略跑跳的情況。因此,當跌倒時,一般會出現以下的情況:
(1)撞擊時加速度的峰值大于閾值Acc1;(2)角速度的峰值大于某個值閾值Wcc1;
(3)一段時間內,出現跌倒的加速度尖峰值次數N1;(4)跌倒后,一定時間內靜止。
本文所采用的加速度和角速度均為合加速度和合角速度,即三軸加速度矢量合以及三軸角速度的矢量合作為人體運動的判斷基礎:

其中Ax,Ay,Az分別代表加速度傳感器所采集的X軸,Y軸,Z軸數據,Acc稱為合成加速度。

其中Wx,Wy,Wz分別代表角速度傳感器所采集的X軸,Y軸,Z軸數據,Wcc稱為合成角速度。
2.2 基于K近鄰法的跌倒檢測判定
由于人體日常活動主要是站立、步行、坐下、躺下、蹲下、起立、上下樓梯、跑步、跳躍等,對這些日常活動進行加速度和角速度數據采集,并進行數據建模,發現同類的數據具有簇居在一起的現狀,所以本設計提出采用K近鄰算法來對跌倒的狀態進行判斷。可以有效的判斷出準確地結果。
K近鄰算法(k-Nearest Neighbor,KNN):對于一個樣本在特征空間中的具有K個距離最近的點,如果其中的大多數屬于某個種類,那么這個樣本也屬于其類別。在KNN算法中,除去被測樣本外的其他樣本都是已知分類。KNN方法通過這種概率分布來判斷待測樣本的類別。具有較高的準確率。
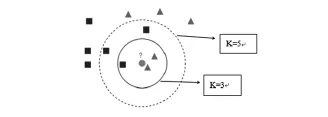
圖2 K近鄰仿真示例圖
圖2 所示中,中間的圓形的分類取決于K的大小,當K=3時,則取距離圓形最近的三個點,判斷其中的類別的比例,最終判斷圓形和三角形屬于同一類別,同樣的道理,當K=5時,圓形和正方形屬于同一類別。其中K的取值,可經過大量數據檢驗得到最為適中的值。
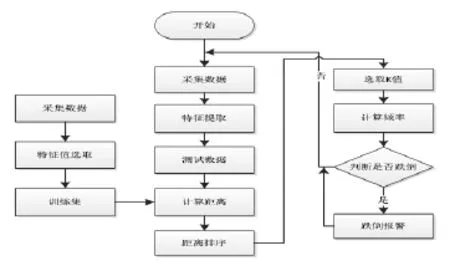
圖3 算法流程圖
實現k近鄰法,主要考慮如何對訓練數據進行快速k近鄰搜索(在特征空間維數大及訓練數據容量大尤其必要)最簡單的實現方法是線性掃描。這時要輸入實例與每一個訓練實例的距離,計算很耗時。所以在測試數據和訓練集進行距離計算時,選擇合理的搜索可以最大化減少數據處理的時間,在保證高正確率的情況下保證實時性。
所采用的的數據存儲和查詢為K-D tree。
K-D tree,是在k維歐幾里德空間組織點的數據結構。kd代表k-dimension,他是一顆平衡二叉樹,通過計算不同方向的方差和中值,從而確定分割超平面。這樣不斷地進行遞歸運算,最終劃分到葉子節點為止。
所采用的的距離度量為歐式距離。
歐式距離:對于2個樣本x和y,設x=(x1,x2,...,xn)T,y=(y1,y2,...,yn)T。樣本x和y的歐式距離定義為:

3 實驗結果
為了驗證本文所設計算法的準確性和實時性,通過大量的實驗數據進行驗證對比,主要從以下幾種情況進行跌倒驗證:站立、走路、跑步、蹲起、向前跌倒、側向跌倒等進行數據采集。
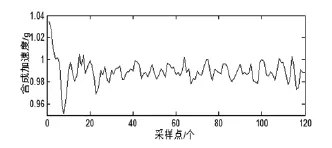
圖4 站立加速度曲線圖
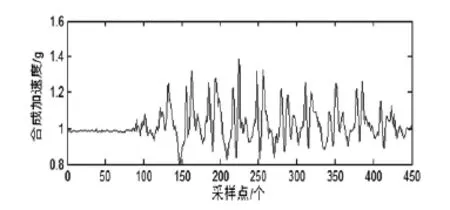
圖5 走路加速度曲線圖
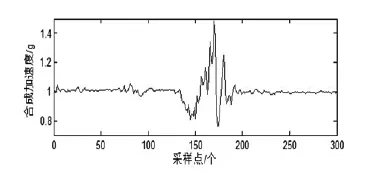
圖6 坐下加速度曲線圖

圖7 跌倒加速度曲線圖
圖4-7所示中通過MATLAB描述不同動作下的加速度變換曲線圖,通過六軸傳感器以50hz的頻率進行數據的采集,每次采集6秒,總共300組數據,對其進行特征提取,獲得每組數據加速度的最大值、最小值,角速度的最大值、最小值。對上圖進行分析可知在迭倒時加速度的峰值可以作為明顯的特征作為判斷的標準。相同的方法可以提取角速度的特征。通過K近鄰算法進行運算得到以下結果:
首先采用60組不參與訓練集的跌倒和非跌倒進行預測,得到的結果是0誤報,0漏報。采用400組不參與訓練集的跌倒和非跌倒進行預測,得到的結果是5誤報,1漏報。誤報率為1.2%,正確率為98.5%。
4 結論
本系統設計的基于六軸傳感器的移動醫療智能監測系統,運用六軸傳感器得到人體跌倒時的準確數據,并對數據進行預處理,利用k近鄰算法得到被檢測者的身體狀態;本算法相比于其他的跌倒檢測算法,具有準確率高,運行時間短,可以保證實時監測。并可以準確地判斷佩戴者是否發生跌倒。在日常生活中,面對大量的獨居老人和生活不能自理的老人。本設計可以準確地對老人的日常生活進行監控,并在發生意外是,第一時間通過GSM/GPS/GPRS,將佩戴者的地理位置信息第一時間發給監護人,實現健康監護的目標。本項目的技術創新點對于老年人的跌倒檢測具有很大的推動作用。
[1]劉宇航.基于九軸慣性傳感器系統的穿戴式跌倒報警系統的研究與實現[碩士學位論文].云南:云南大學,2015.
[2]Doughty K,Cameron K..Primary and Secondary Sensing Techniques for Fall Detection in the Home.Proceeding of Hospital Without Walls.London;City University,1999.
[3]Yang,C.-C.,Hsu,Y.-L.A review of accelerometry-based wearable motion detectors for physical activity monitoring[J].Sensors,2010,10(8):7772-7788.
[4]文耀鋒.一種實時的跌倒姿態檢測和心率監護系統的研究[博士學位論文].浙江:浙江大學,2008.
[5]M.J.Fischer,N.A.Lynch,and M.S.Patcrson.Impossibility of distributed consensus with one faulty processor[J].Journal of the ACM,1985.32(2):374-382P.
[6]P.Fraigniaud,A.Pelc,D.Peleg,and S.Perennes.Assigning labels in unknown anonymous network[C].Proceedings of the 19th Annual ACM SIGACT-SIGOPS symposium on Principles of Distributed Computing,Portland,OR,USA,July 2000.1:101-111.
[7]張元亭等.移動醫療:穿戴式醫療儀器的發展趨勢[J].中國醫療器械雜志,2006,30(5):330-340.
陳祥寶(1993—),男,安徽六安人,碩士研究生,主要研究方向:醫療器械設備與嵌入式系統實際以及跌倒算法研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年1期)2022-08-30 08:40:44
保健醫苑(2022年6期)2022-07-08 01:25:16
保健醫苑(2022年4期)2022-05-05 06:11:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海峽姐妹(2018年1期)2018-04-12 06:44:24