由太陽和地磁參數構成的信鴿導航原理仿真
2017-04-20 03:25:26薛炳森韓大洋國家衛星氣象中心北京100080
導航與控制 2017年2期
關鍵詞:方向
薛炳森韓大洋(國家衛星氣象中心北京100080)
由太陽和地磁參數構成的信鴿導航原理仿真
薛炳森,韓大洋
(國家衛星氣象中心,北京100080)
根據信鴿導航理論和相關試驗結果的分析,確定太陽高和地磁場參數的組合可以形成信鴿導航的環境基礎。通過分析信鴿對太陽高度角、地磁傾角參數的可能利用過程,結合信鴿飛行路徑的特點,確認了信鴿方向判斷原理和逐漸趨緊的過程,并在此基礎上,通過計算機程序對信鴿導航過程和分型線路進行了模擬,結果較為符合信鴿的飛行特點,并對信鴿導航的初步原理進行了分析和解釋。
信鴿;導航;太陽高度角;地磁傾角
0 引言
長久以來,信鴿能夠準確地找到鴿巢一直是生物學家研究的現象,有試驗顯示[1],鴿子可以從遙遠的、陌生的放飛點返回。經驗豐富的鴿子即使在被麻醉的狀態下,被剝奪旅途信息,或乘飛機直接到達陌生放飛地點,仍可以用近似直線的路徑回到鴿巢。因此,鴿子應當具有確定從放飛地點到目的地(鴿巢)方向的能力。現代研究表明,信鴿辨識歸巢方向除了訓練的因素外,自然界的特征和變化規律,如太陽方位、地磁場、顯著地標、氣味等都是信鴿導航所依賴的外部條件。
太陽的位置是信鴿導航的重要參考,同時,信鴿生物鐘是與之相配合的參數。國外經常采用時間錯位(time?shift)的方法使信鴿對時間的感覺與目的地形成一個時差,對比結果顯示,沒有經過時間錯位處理的信鴿出發方向正確,全部返回;而有時差的信鴿發生方向錯誤,歸巢率幾乎為零[2]。這說明,信鴿是通過不同時間太陽的方位來感知目的地的方位。
信鴿對事件感知原理的試驗顯示,信鴿在下丘腦的調控下,類松果體通過合成褪黑素,而表達輸出效應。松果體作為一個神經內分泌器官,也在各種非哺乳類脊椎動物中起著中樞晝夜節律振蕩器的作用。在多數情況下,松果體振蕩器均保持與光信號輸入通路和內分泌輸出通路的密切聯系。近來,在鳥類松果體中相繼發現了幾種鐘基因,其表達的時間變化規律與哺乳類動物的非常相似[3]。而這種特定地點(鴿巢)時間與太陽方位的對應需要通過記憶來實現。同樣,信鴿憑著對氣味、地標,特別是地磁場的記憶,同樣可以實現導航的功能。
地磁場是信鴿判斷方向和位置的主要線索,Schiffner等[4]開展的試驗中,用GPS追蹤信鴿飛行路徑。分別從多個磁場分布異常和正常的區域放飛信鴿,通過多次試驗比較,發現信鴿的歸巢率沒有差別。但也發現,在磁異常區域放飛的信鴿歸巢時間要長一些。該研究者認為,磁場的局部異常確實可以對信鴿的導航系統產生影響,但信鴿逐漸可以適應。在試驗中,信鴿從兩個距離相等的地點放飛,一個地點磁場異常,另一地點磁場正常,采用GPS記錄鴿子的飛行軌跡。結果在一開始的軌跡記錄中發現顯著的差異,在磁場異常的地點,初始階段持續更長的時間,飛行距離較長。通過比較發現,從磁場正常的地點放飛的信鴿,一開始就能找到歸巢的方向,但當它們經過磁場異常的地區時,同樣出現了迷失方向的時段。研究者認為,通過與潛在的磁輪廓異常的軌道相比,個體之間的差異相當大,沒有一個共同的模式出現。
動物生理學的研究發現,信鴿的上喙部存在鐵磁性物質,國外研究者在家鴿上喙皮膚組織中發現了規則分布的超順磁磁鐵礦顆粒。他們應用透射電子顯微鏡確認了這些小磁鐵礦晶體為尺寸在1nm~5nm的聚集體,集中存在于皮下組織中。這些超順磁粒子聚集體又形成直徑為1μm~3μm的粒子束,分布在大細胞之間的長形結構中,并且與神經組織緊密相連。應用光學顯微鏡和電子顯微鏡,國外研究者也對家鴿上喙傳入三叉神經末梢的磁細胞組織進行了研究。這些神經末梢組織直徑大約5μm,內部包含著聚集成束的超順磁磁鐵礦顆粒。
Holland等[5]的試驗結果顯示,大約10~15個粒子束存在于一個神經末梢中,沿著細胞膜排列。每一個超順磁粒子束包埋在一個杯狀結構中,口朝向細胞表面,通過纖維組織,這些粒子束黏附在細胞表面上[6]。除了超順磁顆粒,非晶態鐵磷酸鹽也被發現,它們沿著神經末梢的纖維中心分布。解剖特征表明,這些神經末端可以探測很小的地磁場強度的變化,考慮到以超順磁磁鐵礦顆粒為基礎的磁接收器理論,研究者還給出了幾個磁接收器的模型。
此外,Schiffner等[4]通過 GPS追蹤的數據分析,信鴿在歸巢途中經常改變飛行方向,這說明信鴿在飛行過程中會經常 “測量”太陽方位或地磁場特性,并對先前的設定方向進行修正。
綜上所述,太陽方位和地磁場是信鴿導航的重要參考量。以往對信鴿歸巢導航原理的研究和試驗通常是定性的,如證明太陽方位、地磁場等確實在信鴿導航過程中起著重要作用。但能夠定量地真正分析信鴿導航過程中所依賴的具體參量較少,因此,嘗試利用計算機模擬的方法,對信鴿利用具體的太陽方位和地磁場參量進行導航的過程進行仿真,研究具體參量大小對信鴿導航精度的影響。
1 數據分析
在研究中,根據信鴿飛行軌跡的特征,以及相關的研究和試驗數據,進行如下假設:1)信鴿有良好的平衡能力,能夠精確地感知太陽的高度角;2)由于信鴿鐵物質頭部的存在,它們可以靈敏地感知當地的磁力線的走向,地磁場的強度;3)由于信鴿對水平面的感知能力,它們能夠準確地感知地磁場相對水平面的夾角,即磁傾角;4)信鴿具有相對固定的生物鐘體系,能夠將時間信息和動態數據有效地結合,例如,信鴿將最近幾天鴿巢附近不同時間的太陽傾角進行對應;5)有良好的記憶能力,能夠記住關鍵的導航參數,如鴿巢附近的地磁傾角,不同時間的太陽傾角等。
在地面附近,地磁場的分布近似于偶極磁場,而且較為恒定,隨著地磁緯度的增加,磁傾角也隨之變大,由于地磁軸與地球自轉軸存在大約11.5°的夾角,地理經緯度和地磁經緯度是不一致的,通過一定的公式可以進行轉換[8],一個地理坐標對應唯一的地磁坐標。特定地磁傾角的位置構成閉合的圈,大致與某一地磁緯度帶重合。表1為我國區域磁傾角的分布[7]。
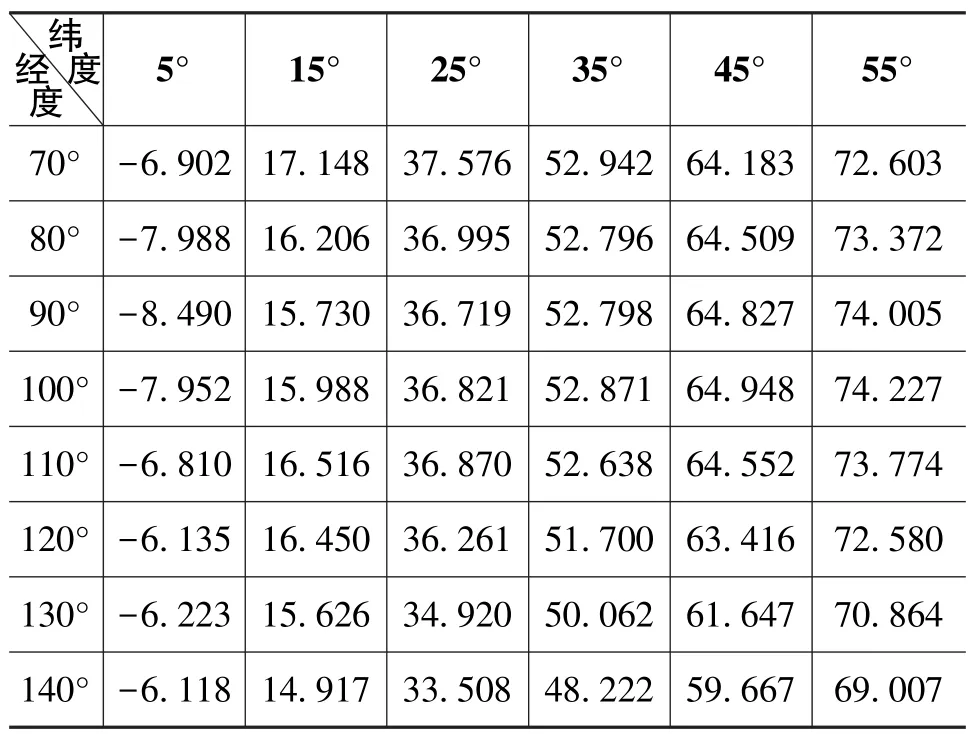
表1 中國區域地磁傾角分布Table 1 The distribution of geomagnetic inclination within China
隨著地球的自轉,信鴿看到的太陽有一個東升西落的過程,太陽與觀測者之間的連線與水平面的夾角稱為太陽高度角。由于地球繞太陽公轉,其自轉軸相對于太陽以1年為周期發生規律性的變化,太陽的觀測者之間的連線與水平面的夾角,又稱為太陽高度角,與觀測所在位置、時間等因素有關,如圖1所示。
太陽高度角與地方時和緯度由式(1)表示:
其中,h為太陽高度角;δ為太陽直射角,即太陽直射地球的緯度,θ為觀測者的地理緯度,特定日期為定值;t為地方時,與經度有關,可表示為:
式中,?為觀測者緯度,?0為UTC時區起始經度(常數),t0為UTC標準時(常數)。可以看出,地方時t與觀測者所在經度一一對應。
公式可變為:
在特定的日期,任選一個太陽高度角,可以證明,某一時間,指定的太陽高度角由南至北分布于一條斜線上。這條線與某選定位置的磁傾角所對應的交點是唯一的,反過來講,在特定時間,選定的太陽的高度角和磁傾角對應的位置是唯一的。換言之,信鴿在飛行過程中,需要不斷感知當地的太陽高度角和磁傾角,并根據長期在巢周圍飛行積累的經驗,對飛行方向進行修正,使得上述兩個參數逐漸趨近鴿巢周圍的太陽高度角和地球磁傾角即可。作為實例,圖2給出的是2∶00UT,高度角30°與磁傾角30°的分布。可見,二者大致呈單調分布,二曲線相交的點即為2∶00UT時刻,滿足高度角30°與磁傾角30°的地理位置,即119.7N27.2E的特定點。這說明,目的地的位置可以通過太陽高度角和地磁傾角來確定,信鴿通過比較所在位置的太陽高度角和磁傾角,集合選擇合適的飛行方向。
我國區域內,如表1所示,磁傾角越向北越大,因此,如果信鴿感知的當地磁傾角小于其記憶的鴿巢的磁傾角,則飛行方向應偏北,反之偏南。另外,根據經驗,東面看到的日出時間較早,即如果當地的太陽高度角大于鴿巢當時的高度角,則飛行方向應向西,反之則向東。信鴿不可能進行復雜的運算,經過進化和人為的訓練后,它們可以學會通過當地和鴿巢之間的太陽高度角以及地磁傾角的變化量來確定飛行方向,使得飛行過程中上述兩個角度的角度差趨于減小,在到達鴿巢附近時,信鴿則可以通過地緣性地標、氣味等信息確定鴿巢的精確位置了。舉一個極端的例子,假如信鴿在放飛地點感知的磁傾角與鴿巢相同,而此時的太陽高度角比鴿巢的大,那么,它向西飛即可,對于信鴿來說則是 “沿著”太陽 “移動”的方向飛行就對了。
2 計算機模擬過程設計
根據上節敘述的模擬信鴿導航原理,編制程序,對信鴿的飛行軌跡進行仿真計算。程序在For?tran平臺上開發,流程如圖3所示。需要給定信鴿的飛行速度V,進行方向校正的間隔時間T。其中,(xh,yh)、(xf,yf)、(x1,y1)分別為:鴿巢、出發點和途中的坐標(經/緯度)。
第一步,信鴿放飛出發時,信鴿通常會在放飛地繞飛,可以理解為采集導航參數的過程。在這個過程中,信鴿能夠獲取當地的太陽高度角和磁傾角。信鴿會將這些數據與相同時間點上鴿巢地所具有的太陽高度角、地磁傾角進行比較,得到放飛地和鴿巢之間的差別,地磁傾角差ΔM表示為:
式中,Mf和Mh分別表示放飛地和鴿巢的磁傾角。
太陽高度角差ΔS表示為:
式中,Sf和Sh分別表示放飛地和鴿巢的太陽高度角。
從放飛地的飛行角度可以表示為:
式中,A表示與北向的夾角。
第二步,模擬信鴿經過T(分鐘)的飛行后,可以得到新的坐標。如果信鴿沒有在鴿巢的10km以內,即無法通過地標和氣味特征進行精細定位,則信鴿將再次感知所處位置的太陽高度角和磁傾角,并重復第一步的過程。直到信鴿進入目的地(鴿巢)的10km范圍內,程序結束。
通過測試,程序成功給出在文中所述原理約束下,中國地區的信鴿的飛行軌跡。圖3和圖4分別給出了兩次模擬歸巢的線路圖。可以看出,信鴿飛行的方向大致是正確的,越到后期飛行方向與目的地的位置越趨近。
3 結論與討論
通過對信鴿導航原理的初步探討和計算機模擬,得出如下結論:1)太陽和地磁場是天然存在的可做導航基準的參照物,鴿子在長期的進化過程中,通過學習、訓練,抑或遺傳,可以具有依靠上述兩種基礎的要素進行導航;2)信鴿的基本能力,如對太陽高度角和磁傾角的感知,以及精確、持久的記憶,包括這些信息與時間的準確對應關系的記憶,通過對比,在飛行中不斷調整方向,最終到達目的地;3)計算機通過對太陽和地磁對信鴿導航影響的模擬,基本上能夠重建信鴿的飛行路線,這說明,計算機模擬可以成為研究信鴿導航的有力工具;4)從模擬的情況說明,太陽和地磁場是信鴿導航的基本參照,在放飛信鴿時應創造最佳環境,如天氣晴好,地磁活動盡量平靜等。
計算機模擬目前還存在不少瑕疵。1)盡管計算機成功模擬了信鴿憑借太陽和地磁場進行導航的過程,但這只是理想狀態,信鴿是否具備我們所假定的判斷能力仍有待考證,后續將設計相應的試驗,以判斷信鴿是否借助計算及模擬的方法進行導航。2)計算機程序目前只考慮了兩種參數,未來可以加入新的參數,如地磁場強度、太陽方位角等,通過更復雜的復合方法對導航過程進行模擬,也可以為科學研究提供線索。另外,計算過程沒有考慮意外情況,如陰天、發生地磁暴等,未來模擬程序改進過程中,環境參數將成為動態的,以便模擬評估地磁暴等突發狀況對導航的影響。
[1] Walcott C.Pigeon homing:observation,experiment and confusion[J].Journal of Experimental Biology,1996,199 (Pt 1):21?27.
[2] Wallraf H,Chappell J,Guilford T.The roles of the sun and the landscape in pigeon homing[J].Journal of Experi?mental Biology,1999,202(Pt 16):2121?2126.
[3] 王國卿,童建.松果體晝夜節律生物鐘分子機制的研究進展[J].生理科學進展,2004,35(3):210?214. WANG Guo?qing,TONG Jian.Research progress on the molecular mechanism of circadian clock in pineal gland [J].Progress in Physiological Sciences,2004,35(3): 210?214.
[4] Schiffner I,Fuhrmann P,Wiltschko R.Homing flights of pigeons in the Frankfurt region:the effect of distance and local experience[J].Animal Behavior,2013,86(2): 291?307.
[5] Richard H,Caterina F,Anna G.A magnetic pulse does not affect pigeon homing navigation:a GPS tracking exper?iment[J].Journal of Experimental Biology,2013,216 (12):2192?2200.
[6] 錢霞,阮樹仁,孫桂芳,等.家鴿頭部的磁性物質[J].物理,2014,43(5):330?336. QIAN Xia,RUAN Shu?ren,SUN Gui?fang,et al.The magnetic substance pigeon's head[J].Physics,2014,43 (5):330?336.
[7] 王解先,李浩軍.磁偏角與磁傾角的公式推導與運算[J].大地測量與地球動力,2009,29(3):88?90+94. WANG Jie?xian,LI Hao?jun.Formula derivation and calcu?lation of magnetic declination and geomagnetic inclination [J].Journal of Geodesy and Geodynamics,2009,29(3): 88?90+94.
Simulation of the Sun Position and Geomagnetic Parameters Effect in Pigeon Homing Navigation
XUE Bing?sen,HAN Da?yang
(National Satellite Meteorological Center,Beijing 100080)
The theory and some experiment result related to pigeon homing and navigation was introduced,through which the idea that the combination of solar zenith angle and geomagnetic inclination angle may play very crucial role in the determination of the flying direction.We suggested that the pigeon has special capability to judge the very small changes in solar zenith angle and geomagnetic inclination angle.It also posses precise biological clock and good memory.with which it could decide the rough direction by comparing the mentioned angle between the present spot and its home.In this way,simulation program was compiled and tested.The result showed that in the process of pigeon homing,the pigeon could find its home by correcting the direction constantly through judging the difference in solar zenith angle and geomagnetic inclina?tion angle between its present site and home.The examples simulated rout of the pigeon homing were given in this paper.
pigeon;navigation;solar zenith angle;geomagnetic inclination angle
U<666.1 文獻標志碼:A class="emphasis_bold">666.1 文獻標志碼:A 文章編號:1674?5558(2017)01?01282666.1 文獻標志碼:A
1674?5558(2017)01?01282
A 文章編號:1674?5558(2017)01?01282
10.3969/j.issn.1674?5558.2017.02.005
薛炳森,男,研究員,研究方向為空間天氣預報技術和效應研究、地磁擾動對信鴿導航的影響。
2016?06?01
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50