單片集成三軸微機電陀螺儀
2017-04-20 03:25:38邢朝洋趙克徐宇新北京航天控制儀器研究所北京100039
導航與控制 2017年2期
邢朝洋趙 克徐宇新(北京航天控制儀器研究所北京100039)
單片集成三軸微機電陀螺儀
邢朝洋,趙 克,徐宇新
(北京航天控制儀器研究所,北京100039)
為使陀螺儀進一步小型化、集成化,提出了一種新型單片集成三軸微機電陀螺儀,該陀螺儀采用單一MEMS結構芯片實現3個軸向角速度的測量。介紹了單片三軸陀螺儀工作方式、結構設計以及電路原理,完成了MEMS結構的流片加工,對陀螺儀表頭和整機進行了測試,單片三軸微機電陀螺儀x軸、y軸和z軸零偏穩定性分別達到53.4(°)/h、70.8(°)/h和18.4(°)/h,非線性度分別為1.59×10-4、3.3×10-4和2.18×10-4。該陀螺儀具有三軸角速率檢測效應,具有集成度高、體積小的優勢,具有較強的應用潛力。
單片三軸;微機電;陀螺儀;零偏穩定性
0 引言
MEMS陀螺儀在近幾年發展迅速,在宇航、武器、汽車、消費電子、機器人和醫療等諸多領域有著廣泛應用,市場對陀螺儀的要求也越來越高。對于MEMS陀螺儀,小型化是目前重要的發展趨勢。其中,多軸集成的微陀螺儀是一個重要的發展方向。
三軸微陀螺儀的集成方式可以分為3類:第一類是采用3個單軸陀螺儀進行微型化封裝集成的三軸微陀螺儀,該方式是在成熟的單軸陀螺儀基礎上開展的,設計和工藝技術都比較成熟,產品精度較高。國外已取得相關產品,但體積較大,如挪威Sensonor公司的三軸陀螺儀STIM202[1]和ADI公司的ADIS16365[2];第二類是在同一基板上制作2個或3個敏感結構,共用同一電路系統實現對三軸角速度的測量,如Invensense公司在2009年底推出的新款三軸陀螺儀ITG3200,封裝尺寸為4mm×4mm×0.9mm,量程達到2000(°)/s,噪聲0.03(°)/s/Hz ;第三類是采用一個敏感結構實現對三軸的角速度測量,國外多家研制機構開展了單片三軸MEMS陀螺儀的研究[4?8],產品已開始應用于消費類市場,如ST的L3G4200D[3]和VTI的CMR3000,具有低成本、體積小的特點,但目前精度還比較低。
國內對于單片三軸硅微陀螺儀的研究剛剛起步,東南大學微慣性儀表實驗室報導了一種四自由度單片式三軸陀螺儀結構,給出了結構關鍵參數,描述了加工工藝,驗證了設計的可行性[9?10]。
本文提出了一種新型的單片集成三軸微機電陀螺儀,屬于上述第三類三軸陀螺儀。本文研究了單片三軸微機電陀螺儀的結構特點、基本尺寸、振動模態和工作方式,描述了陀螺儀表頭結構的加工工藝流程,實現了三軸陀螺儀共用電路,三軸陀螺儀表頭和整機測試結果表明達到了設計要求。
1 三軸陀螺儀工作原理
三軸陀螺儀采用單結構方案,如圖1所示。結構由4個主質量塊構成,4個主質量塊通過斜梁連接。每個主質量塊上帶有2個小質量塊,主質量塊與小質量塊通過H型梁連接,2個小質量塊之間由橫梁來連接。該結構的尺寸為 6.5mm× 6.5mm,結構各個部分關鍵尺寸如表1所示。

表1 三軸硅微陀螺儀主要結構尺寸(單位:μm)Table 1 Dimensions of tri?axis silicon MEMS gyro(unit:μm)
該陀螺儀的工作模態分別為驅動模態、x軸檢測模態、y軸檢測模態和z軸檢測模態。三軸陀螺儀的驅動模態如圖2所示。在驅動梳齒上施加帶有直流偏置的交變電信號,在諧振狀態下,4個主質量塊在諧振頻率下振動。其中,上、下和左、右2組主質量塊運動相位相反。
三軸硅微陀螺儀的x軸和y軸檢測模態如圖3所示。當沿面內的x軸有角速度輸入時,陀螺儀沿y軸分布的兩個主質量塊由于科氏力的作用在z軸方向作簡諧振動,如圖3(a)所示,主質量塊的振幅與輸入的角速度大小成正比關系。另一方面,主質量塊與對應的檢測電極組成的電容發生變化,電容變化量與質量塊的振幅近似成正比,因此可根據檢測電極電容變化量的大小得出x軸輸入角速度的大小;同理,當沿平面y軸有角速度輸入時,陀螺儀沿x軸分布的兩個主質量塊由于科氏力的作用在z軸方向作簡諧振動,如圖3(b)所示,通過y軸檢測電極測出y軸輸入的角速度大小。
三軸硅微陀螺儀的z軸檢測模態如圖4所示。當z軸有角速度輸入時,8個小質量塊在科氏力的作用下在平面內作簡諧振動,小質量塊的振幅與輸入的角速度大小成正比。同樣地,通過z軸檢測電極電容變化量的大小,檢測得出z軸輸入角速度的大小。8個電容分成兩組進行差分檢測,可抵消共模誤差的影響。
通過ANSYS軟件仿真得出各個工作模態諧振頻率,如表2所示。
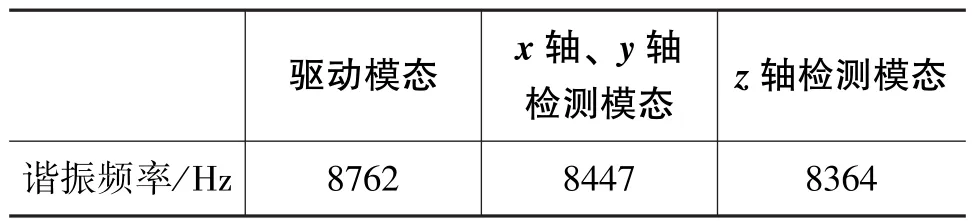
表2 三軸硅微陀螺儀各模態頻率Table 2 The resonance mode frequencies of tri?axis MEMS gyro
2 三軸陀螺儀工藝流程
三軸硅陀螺儀采用SOG工藝加工制作,由于結構復雜,并需要兼顧3個工作頻率,工藝加工難度較大,特別是對芯片厚度精度要求較高,加工中將厚度誤差控制到1μm以內。加工完成的陀螺儀結構照片如圖5(a)所示,梳齒結構的SEM照片如圖5(b)所示。
陀螺儀結構采用器件級真空封裝,芯片黏接在陶瓷管殼中,進行真空烘烤、引線鍵合和封帽,完成陀螺儀表頭的加工制作。未封帽前的陀螺儀表頭如圖6所示,表頭的封裝尺寸為11.4 mm× 11.4 mm×2.0mm。
3 三軸陀螺儀電路原理
單片三軸微機電陀螺儀采用單驅動三方向檢測的模式進行工作,因此電路結構分為1個驅動模塊和3個檢測模塊。相比于3個單軸陀螺儀集成的方式,其電路最大限度實現公用,具有結構簡單、體積小和功耗低的優勢。三軸陀螺電路圖如圖7所示。
4 三軸陀螺儀測試
陀螺儀整機如圖8所示。電路采用的是厚膜集成電路,整個樣機的尺寸為51mm×41mm×6mm。之后,對陀螺儀芯片及整機進行了測試。
4.1 表頭特性掃頻測試
將信號發生器接入陀螺電路進行激勵,采用C/V電路作為輸出端進行檢測,各個工作模態的掃頻曲線如圖9所示。并依據式(1)進行Q值計算:
式中,f0為諧振頻率,f1、f2分別為半功率點頻率。
從圖9(a)中可以看出,驅動模態曲線較為理想,驅動諧振頻率附近無其他峰值,無其他模態干擾;在圖9(b)和圖9(c)中,x軸、y軸檢測模態曲線基本一致,表明兩個模態對稱性較好;圖9(d)中,z軸檢測模態與x軸、y軸檢測模態相比,Q值較高,但諧振頻率附近有其他模態的干擾。
各個模態諧振頻率的仿真結果與測試結果如表3所示。從結果可以看出,仿真與測試結果之間符合度較高。
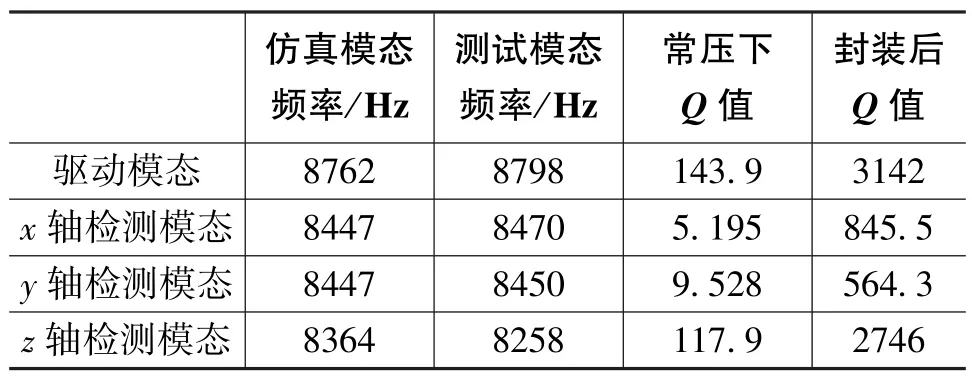
表3 三軸硅微陀螺儀各模態的仿真計算頻率和測試頻率Table 3 The simulating results and measurement results of tri?axis resonance modes
4.2 樣機性能測試
(1)速率測試
對三軸陀螺儀樣機進行速率測試,速率測試測試范圍為±500(°)/s,速率測試曲線如圖10所示。
各個軸向的標度因數分別為12.8mV/(°)/s、11.9mV/(°)/s和12.7mV/(°)/s,非線性度分別為1.59×10-4、3.3×10-4和2.18×10-4,非線性度均小于5×10-4。
(2)零位穩定性測試
采集三軸陀螺儀零位穩定性數據,進行Allan方差分析,曲線如圖11所示。對該曲線運用式(2)進行擬合:
式中,τ為Allan方差的時間長度;Am為擬合系數。得到x軸的零偏穩定性為53.4(°)/h,角度隨機游走為 4.72(°)/h ;y軸的零偏穩定性為70.8(°)/h,角度隨機游走為6.59(°)/h;z軸的零偏穩定性為18.4(°)/h,角度隨機游走為3.34(°)/h。可見,x軸、y軸輸出的零偏穩定性和噪聲與z軸方向相比較差。
對此陀螺儀結構,x檢測軸、y檢測軸工作于面外扭轉振動模態與z軸面內線振動模態相比,前者對加工精度要求較高,尤其對芯片厚度的均勻性要求更加嚴格。又由于其阻尼為壓膜阻尼,Q值較低;后者受加工工藝誤差影響相對較小,且采用梳齒進行檢測,表面的阻尼類型為滑膜阻尼,Q值較高。
綜合以上測試數據,此三軸陀螺儀各項性能參數如表4所示。可見,該陀螺儀具備了三軸角速度檢測功能,并實現了一定的精度。
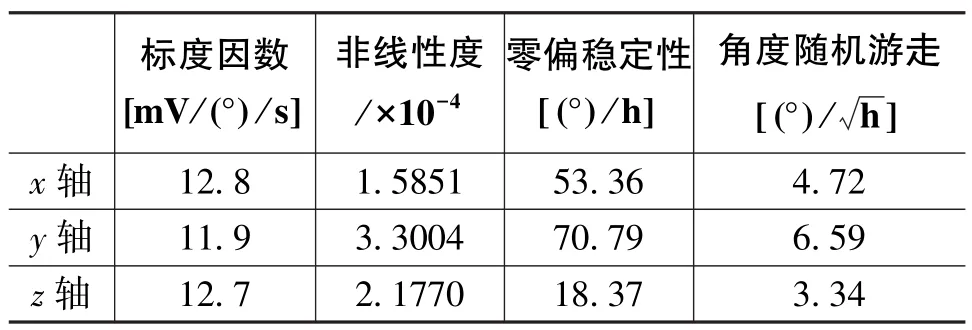
表4 整表測試結果Table 4 The measurement results of prototype performance
5 結論
本文提出了一種單片三軸微機電陀螺儀,采用單一MEMS結構芯片實現3個軸向角速度的測量,三軸陀螺儀采用 “單驅三檢”的模式,最大程度實現了電路共用,經過研制,實現了具有一定的精度的樣機。
從測試結果來看,單片三軸微機電陀螺儀3個軸之間的性能匹配程度還有待提高。目前該樣機尺寸還較大,但由于芯片結構體積較小,具有小型化的潛力,如采用ASIC電路減小電路體積、采用圓片級封裝技術可進一步減小整表體積。
[1] Sensonor Technologies A S.Stim202 Datasheet[EB/OL]. http://www.sensonor.com/gyro?products/gyro?modules/stim 202.aspx.
[2] Analog Device Inc.ADIS16365 Datasheet[EB/OL].http://www.analog.com/media/en/technical?documentation/data?sheets/ADIS16360_16365.pdf.
[3] STMicroelectronics.L3G4200D Datasheet[EB/OL].http://www.st.com/content/st_com/en/products/mems?and?s?ensors/gyroscopes/l3g4200d.html.
[4] Seshia A A,Howe R T,Montague S.An integrated micro?electromechanical resonant output gyroscope[C].Process of the 15thInternational Conference,MEMS 2002,Las Ve?gas,2002:722?726.
[5] Juneau T,Pisano A P,Smith J H.Dual axis operation of a micromachined rate gyroscope[C].Process of the IEEE 1997 International Conference,Tranducers’97,Chicago,1997:883?886.
[6] Tsai D H,Fang W.Design and simulation of a dual?axis sensing decoupled vibratory wheel gyroscope[J].Sensors and Actuators A:Physical,2006,126(1):33?40.
[7] Wood D,Cooper G,Burdess J S,et al.A monolithic silicon gyroscope capable of sensing about three axes simultaneously [J].IEEE Colloquium(Digest),1996(227):2/1?2/3.
[8] John J D,Vinay T.Novel concept of a single?mass adap?tively controlled triaxial angular rate sensor[J].IEEE Sensor Journal,2006,6(3):588?595.
[9] 王元山,熊敏敏,王壽榮.單片集成三軸微機械陀螺技術初步研究[J].測控技術,2005,24(10):73?75. WANG Yuan?shan,XIONG Min?min,WANG Shou?rong. Research on monolithic integrated three?axis micromachined gyroscope[J].Measurement&Control Technology,2005,24(10):73?75.
[10] 夏敦柱,孔倫,虞成.四模態匹配三軸硅微陀螺儀[J].光學精密工程,2013,21(9):2326?2332. XIA Dun?zhu,KONG Lun,YU Cheng.Four?mode matc?hing tri?axis silicon microgyroscope[J].Optics and Pre?cision Engineering,2013,21(9):2326?2332.
Monolithic Integrated Tri?axis MEMS Gyroscope
XING Chao?yang,ZHAO Ke,XU Yu?xin
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
This article proposed a novel single?chip integrated tri?axis MEMS gyroscope,which was benefit for device miniature and integration.Only one chip MEMS structure was used to achieve tri?axis angular rate detection.Firstly,the operating principle,structure and electronic circuits of the gyroscope were introduced.Secondly,the fabrication process of silicon micro?structure was presented.Finally,the performances of gyroscope chip and the prototype were measured.The bias stabilities were 53.4(°)/h,70.8(°)/h and 18.4(°)/h inx?axis,y?axis andz?axis,respectively.The nonlinearities were 1.59×10-4,3.3×10-4and 2.18×10-4inx?axis,y?axis andz?axis,respectively.This gyroscope has tri?axis angular rate detection effect,with the advance of chip structure miniature,have certain application potentiality.
single chip tri?axis;micro electro mechanical;gyroscope;bias stability
U666.12+3
A
1674?5558(2017)02?01274
10.3969/j.issn.1674?5558.2017.02.011
邢朝洋,男,博士,研究方向為MEMS慣性儀表。
2016?05?03
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
海峽科技與產業(2016年3期)2016-05-17 04:32:12
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00