適應(yīng)伺服機(jī)構(gòu)卡死故障的控制指令重分配技術(shù)研究
2017-04-25 05:18:16程堂明
導(dǎo)彈與航天運(yùn)載技術(shù) 2017年1期
程堂明,陳 宇
(1. 國(guó)防科技大學(xué)航天科學(xué)與工程學(xué)院,長(zhǎng)沙,410073;2. 北京宇航系統(tǒng)工程研究所,北京,100076)
適應(yīng)伺服機(jī)構(gòu)卡死故障的控制指令重分配技術(shù)研究
程堂明1,2,陳 宇2
(1. 國(guó)防科技大學(xué)航天科學(xué)與工程學(xué)院,長(zhǎng)沙,410073;2. 北京宇航系統(tǒng)工程研究所,北京,100076)
提出一種能夠適應(yīng)運(yùn)載火箭伺服機(jī)構(gòu)卡死故障的控制指令重分配技術(shù)。在傳統(tǒng)運(yùn)載火箭控制系統(tǒng)設(shè)計(jì)過(guò)程中,伺服機(jī)構(gòu)指令是在不考慮伺服機(jī)構(gòu)故障時(shí)設(shè)計(jì)確定的,一旦伺服機(jī)構(gòu)發(fā)生卡死故障將可能導(dǎo)致箭體姿態(tài)失穩(wěn)。為了提高運(yùn)載火箭的安全性和可靠性,根據(jù)某伺服機(jī)構(gòu)卡死角度,通過(guò)控制指令在多個(gè)冗余伺服機(jī)構(gòu)之間的重分配,在伺服機(jī)構(gòu)卡死情況下仍能保證姿態(tài)穩(wěn)定。仿真結(jié)果表明,即使某個(gè)伺服機(jī)構(gòu)卡死也能保證姿態(tài)穩(wěn)定,而且不需要重新設(shè)計(jì)控制參數(shù)。
運(yùn)載火箭; 控制重分配; 姿態(tài)控制
0 引 言
運(yùn)載火箭容錯(cuò)與重構(gòu)控制方法是提高火箭飛行可靠性的有效途徑,在傳統(tǒng)火箭設(shè)計(jì)過(guò)程中,往往注重硬件余度設(shè)計(jì),而對(duì)解析冗余設(shè)計(jì)技術(shù)研究較少。解析冗余控制技術(shù)是利用系統(tǒng)不同部件之間的內(nèi)在聯(lián)系和功能上的冗余性,當(dāng)系統(tǒng)中的一部分出現(xiàn)故障時(shí),可以由冗余部分代替故障部分的工作,以保證系統(tǒng)在規(guī)定的時(shí)間內(nèi)正常地實(shí)現(xiàn)規(guī)定的功能。解析冗余技術(shù)不需要增加硬件設(shè)備,具有成本低和易于工程實(shí)現(xiàn)的優(yōu)點(diǎn),在容錯(cuò)控制中得到了廣泛的應(yīng)用。
大型捆綁火箭由于同時(shí)利用芯級(jí)和助推發(fā)動(dòng)機(jī)進(jìn)行姿態(tài)控制,即多發(fā)動(dòng)機(jī)聯(lián)合搖擺控制,一方面提高了火箭的控制能力,另一方面由于伺服機(jī)構(gòu)臺(tái)數(shù)的增多,在單臺(tái)伺服機(jī)構(gòu)故障率一定的情況下,伺服系統(tǒng)發(fā)生故障的概率也大大增加,一旦某臺(tái)伺服機(jī)構(gòu)發(fā)生故障,可能導(dǎo)致姿態(tài)失穩(wěn),從而造成災(zāi)難性的后果。而且,伺服機(jī)構(gòu)臺(tái)數(shù)的增多,也增加了系統(tǒng)的余度。當(dāng)單臺(tái)伺服機(jī)構(gòu)發(fā)生故障時(shí),可以利用剩余未發(fā)生故障的發(fā)動(dòng)機(jī)進(jìn)行控制指令重分配,從而提高系統(tǒng)的可靠性。采用控制指令重分配技術(shù)后,控制系統(tǒng)的設(shè)計(jì)將分離成容錯(cuò)控制器設(shè)計(jì)和控制分配器設(shè)計(jì)兩部分,其優(yōu)點(diǎn)主要有以下3點(diǎn):
a)可以充分考慮伺服機(jī)構(gòu)位置、速率的范圍限制,如果一個(gè)伺服機(jī)構(gòu)飽和,其他伺服機(jī)構(gòu)仍可用于產(chǎn)生期望的控制效果;
b)控制分配可以利用系統(tǒng)冗余,針對(duì)特定目標(biāo),實(shí)現(xiàn)系統(tǒng)優(yōu)化;
c)如果伺服機(jī)構(gòu)出現(xiàn)故障,則可以通過(guò)控制重分配設(shè)計(jì)以補(bǔ)償這些故障,而不需要重新設(shè)計(jì)控制參數(shù)。
目前,針對(duì)各種飛行器作動(dòng)器故障開(kāi)展了控制分配技術(shù)研究。文獻(xiàn)[1]針對(duì)多操縱面戰(zhàn)斗機(jī)提出了一種新的基于加權(quán)最小二乘法和控制分配算法的重構(gòu)控制方法;文獻(xiàn)[2]針對(duì)多操縱面飛機(jī)提出了一種基于線性規(guī)劃的多操縱面重構(gòu)控制策略;文獻(xiàn)[3]針對(duì)X-35B多種飛行模式和控制失效模式提出了控制分配算法;文獻(xiàn)[4]針對(duì)波音747飛機(jī)提出了一種考慮伺服機(jī)構(gòu)動(dòng)態(tài)特性的控制分配算法,并采用遺傳算法對(duì)控制增益進(jìn)行優(yōu)化。然而針對(duì)運(yùn)載火箭伺服機(jī)構(gòu)故障開(kāi)展的研究還很少。
常用的控制指令重分配方法有直接控制分配法、串接鏈法和線性規(guī)劃法,這些方法所用的共性技術(shù)是求解有約束優(yōu)化問(wèn)題,計(jì)算量較大,不便于工程應(yīng)用。偽逆分配法通過(guò)計(jì)算控制輸入矩陣的偽逆,獲取控制分配矩陣,雖然該方法計(jì)算量小,但不是總能給出優(yōu)化結(jié)果,特別在故障情況下,可能無(wú)法求解。
本文以某型運(yùn)載火箭[5]為例,根據(jù)運(yùn)載火箭姿態(tài)動(dòng)力學(xué)模型[6]提出一種芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合控制分配方法,該方法計(jì)算量小,計(jì)算速度比其他方法都要快。仿真結(jié)果表明,本文通過(guò)控制指令重分配算法可以有效補(bǔ)償故障發(fā)動(dòng)機(jī)引起的干擾擺角,故障前后能夠保證姿態(tài)動(dòng)力學(xué)特性和原有的控制性能保持不變,控制參數(shù)無(wú)需重新設(shè)計(jì),從而實(shí)現(xiàn)對(duì)伺服機(jī)構(gòu)卡死故障的適應(yīng)性,提高了姿態(tài)控制系統(tǒng)的魯棒性。
1 問(wèn)題描述
1.1 發(fā)動(dòng)機(jī)布局描述
某構(gòu)型運(yùn)載火箭一級(jí)發(fā)動(dòng)機(jī)布置如圖1所示。
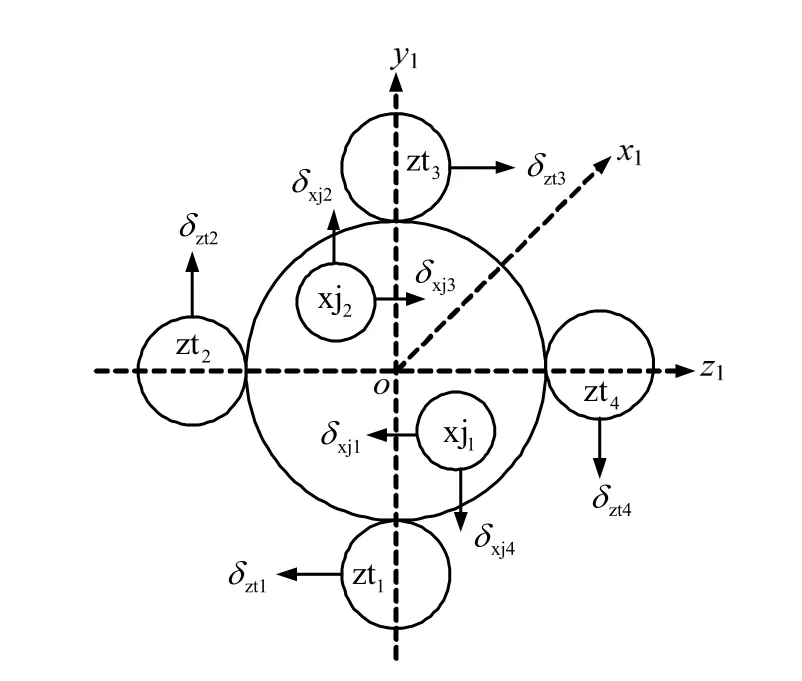
圖1 某構(gòu)型發(fā)動(dòng)機(jī)布局示意
圖1中,ox1y1z1為移動(dòng)到箭體尾部的箭體坐標(biāo)系;xj1,xj2為2臺(tái)芯級(jí)發(fā)動(dòng)機(jī); zt1~zt4為4臺(tái)助推發(fā)動(dòng)機(jī),4臺(tái)助推發(fā)動(dòng)機(jī)采用“+”字型布局,各發(fā)動(dòng)機(jī)的擺角按圖1所示方向?yàn)檎F洇膞j1~δxj4分別為4臺(tái)芯級(jí)伺服機(jī)構(gòu)擺角;δzt1~δzt4分別為4臺(tái)助推伺服機(jī)構(gòu)擺角。
1.2 姿態(tài)動(dòng)力學(xué)模型描述
在本文的研究過(guò)程中,可不考慮彈性振動(dòng)和液體晃動(dòng)特性,按照文獻(xiàn)[6]提供的運(yùn)載火箭剛體姿態(tài)動(dòng)力學(xué)模型如下:
a)俯仰通道。
b)偏航通道。
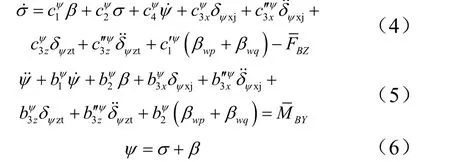
c)滾動(dòng)通道。

式中φ ψ γ, , 分別為俯仰、偏航、滾動(dòng)通道的姿態(tài)角偏差;θ,σ,αβ分別為速度傾角、速度偏角、攻角和側(cè)滑角的偏差;δφxj,δψxj,δγxj分別為俯仰、偏航、滾動(dòng)通道芯級(jí)發(fā)動(dòng)機(jī)擺角;δφzt,δψzt,δγzt分別為俯仰、偏航、滾動(dòng)通道助推發(fā)動(dòng)機(jī)擺角;αwp,αwq,βwp,βwq分別為平穩(wěn)風(fēng)和切變風(fēng)產(chǎn)生的攻角和側(cè)滑角;,,,,分別為結(jié)構(gòu)干擾系數(shù);其余系數(shù)的物理意義參見(jiàn)文獻(xiàn)[6]。
1.3 控制指令重分配問(wèn)題描述
根據(jù)圖1所示某構(gòu)型運(yùn)載火箭的發(fā)動(dòng)機(jī)布局可知,一級(jí)飛行段控制發(fā)動(dòng)機(jī)的伺服機(jī)構(gòu)共有8臺(tái),當(dāng)其中一臺(tái)發(fā)生卡死故障時(shí),不但不能提供有效的控制力矩,還將產(chǎn)生附加的不平衡力矩,從而導(dǎo)致姿態(tài)失穩(wěn),影響整個(gè)飛行任務(wù)的成敗。本文主要研究當(dāng)一臺(tái)伺服機(jī)構(gòu)發(fā)生卡死故障時(shí),如何重分配其余 7臺(tái)伺服機(jī)構(gòu)的控制指令,在克服干擾力矩的同時(shí),總的控制力矩保持不變。
2 芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合重分配技術(shù)
2.1 聯(lián)合重分配方案設(shè)計(jì)思想
芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合重分配方案的設(shè)計(jì)思想是:針對(duì)捆綁運(yùn)載火箭利用芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合搖擺進(jìn)行姿態(tài)控制的特點(diǎn),通過(guò)對(duì)控制系統(tǒng)指令擺角的重分配,使運(yùn)載火箭芯級(jí)和助推發(fā)動(dòng)機(jī)產(chǎn)生的總控制力矩在故障發(fā)生前后保持不變,從而實(shí)現(xiàn)容錯(cuò)控制。
2.2 聯(lián)合重分配基本方案
根據(jù)運(yùn)載火箭姿態(tài)動(dòng)力學(xué)模型,為了表述方便,用歸一化后的控制力矩(即用控制力矩除以相應(yīng)轉(zhuǎn)動(dòng)慣量,以下簡(jiǎn)稱(chēng)為控制力矩)來(lái)表示實(shí)際的控制力矩。助推飛行段控制發(fā)動(dòng)機(jī)的伺服機(jī)構(gòu)共有8臺(tái),由于火箭結(jié)構(gòu)和發(fā)動(dòng)機(jī)布局的對(duì)稱(chēng)性,任意一個(gè)伺服機(jī)構(gòu)卡死的控制分配方案相類(lèi)似。不失一般性,假設(shè)助推2號(hào)伺服機(jī)構(gòu)發(fā)生故障,以下假設(shè)δz′t2=δf,表示助推2號(hào)發(fā)動(dòng)機(jī)伺服機(jī)構(gòu)發(fā)生故障,故障狀態(tài)下的發(fā)動(dòng)機(jī)擺角為δf。
在正常工作狀態(tài)下,設(shè)芯級(jí)和助推發(fā)動(dòng)機(jī)產(chǎn)生的控制力矩分別為Mxj和Mzt,產(chǎn)生的總控制力矩為M,則有:

其中:

即:

式中δxji和δzti分別為芯級(jí)和助推發(fā)動(dòng)機(jī)控制指令,其中;和分別為芯級(jí)和助推發(fā)動(dòng)機(jī)控制指令分配比例,其中=0.5,=1.0,i=φ ,ψ, γ;上述比例取值是根據(jù)芯級(jí)和助推發(fā)動(dòng)機(jī)擺角限幅值比值關(guān)系確定的。此時(shí),。
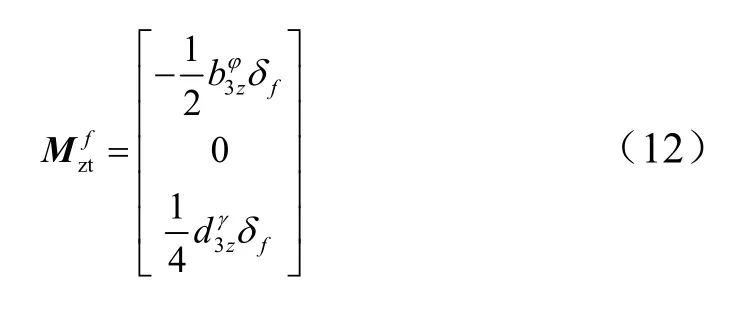
當(dāng)助推2號(hào)發(fā)動(dòng)機(jī)發(fā)生故障時(shí),故障發(fā)動(dòng)機(jī)仍然產(chǎn)生“控制”力矩,但實(shí)際上此時(shí)的“控制”力矩已經(jīng)成為姿態(tài)穩(wěn)定的障礙。因此,把故障發(fā)動(dòng)機(jī)所產(chǎn)生的“控制”力矩稱(chēng)為干擾力矩,記為。
根據(jù)助推通道的等效擺角公式:

則干擾力矩為
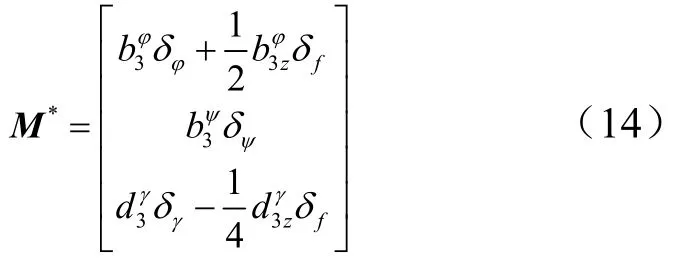
故障發(fā)生后需要重分配控制指令到剩余7臺(tái)正常工作的伺服機(jī)構(gòu),故障伺服機(jī)構(gòu)將不再分配控制指令。設(shè)系統(tǒng)重分配后芯級(jí)和助推發(fā)動(dòng)機(jī)產(chǎn)生的控制力矩分別為和。故障伺服機(jī)構(gòu)產(chǎn)生的干擾力矩可以看作是系統(tǒng)本身的固有力矩,因此,需要重分配的控制力矩M*包括原有的控制力矩M和克服故障產(chǎn)生的干擾力矩所需要的控制力矩,則有:

將式(10)、式(12)代入式(13)后可得:
重分配后芯級(jí)和助推的控制力矩為

將式(15)代入式(8)后可得:

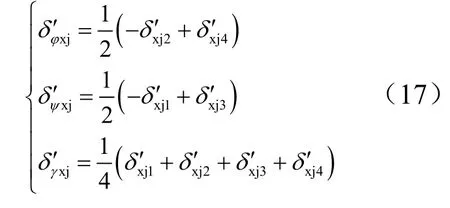
重分配后芯級(jí)通道的等效擺角公式:
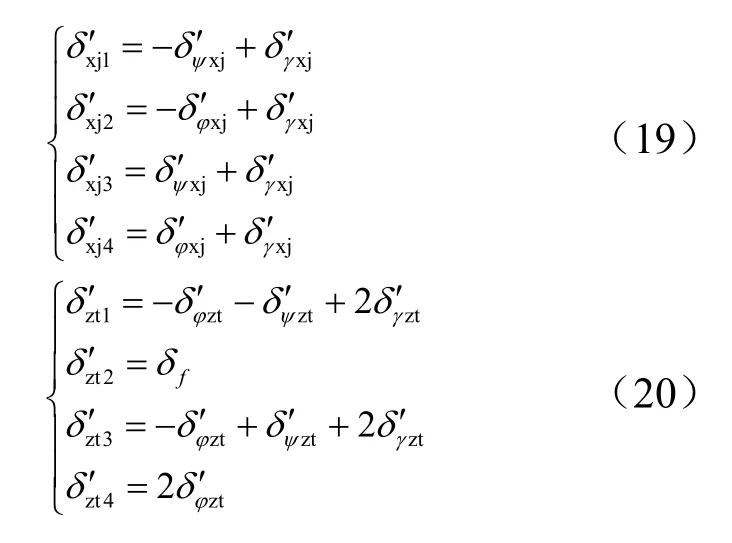
重分配后助推通道的等效擺角公式為

則:
2.3 聯(lián)合重分配比例系數(shù)選取
重分配后芯級(jí)和助推發(fā)動(dòng)機(jī)需要產(chǎn)生的控制擺角可采用多種方式選取分配比例系數(shù),比如控制擺角按比例分配、控制力矩按比例分配、實(shí)際擺角按比例分配等分配方法。為了發(fā)揮出各臺(tái)伺服機(jī)構(gòu)的最大能力,本文選取實(shí)際擺角按比例分配方案作為研究方案。

則有:

由于芯級(jí)和助推發(fā)動(dòng)機(jī)擺角限幅值存在一定的比例關(guān)系,則有 k1=k3=k4=k ,則有:
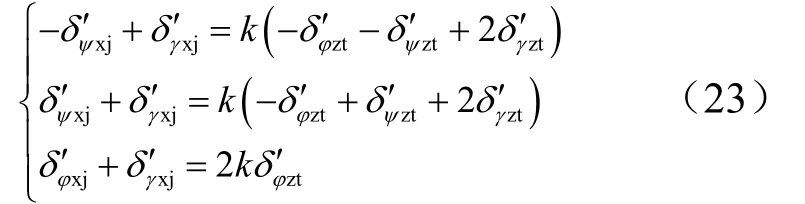
即:

將式(24)代入式(16)則有:
化簡(jiǎn)后可得:

將式(27)代入式(19)和式(20)后可得各臺(tái)伺服機(jī)構(gòu)的擺角指令。
值得注意的是,火箭發(fā)動(dòng)機(jī)在工作過(guò)程中,各個(gè)伺服擺角都有限幅值,當(dāng)分配給某個(gè)伺服擺角的指令超過(guò)其限幅值時(shí),分配公式將不嚴(yán)格滿足,控制分配后所產(chǎn)生的控制力矩將不足以完全補(bǔ)償損失的控制力矩。而本文所提出的方法可以根據(jù)擺角限幅值確定分配系數(shù),因此,可以最大程度地解決指令重分配后的擺角限幅問(wèn)題。
3 仿真驗(yàn)證
根據(jù)芯級(jí)和助推發(fā)動(dòng)機(jī)擺角限幅值的比例關(guān)系可以確定k=0.75,假設(shè)77 s時(shí)助推2號(hào)發(fā)動(dòng)機(jī)發(fā)生大擺角卡死故障,仿真結(jié)果如圖2~6所示。
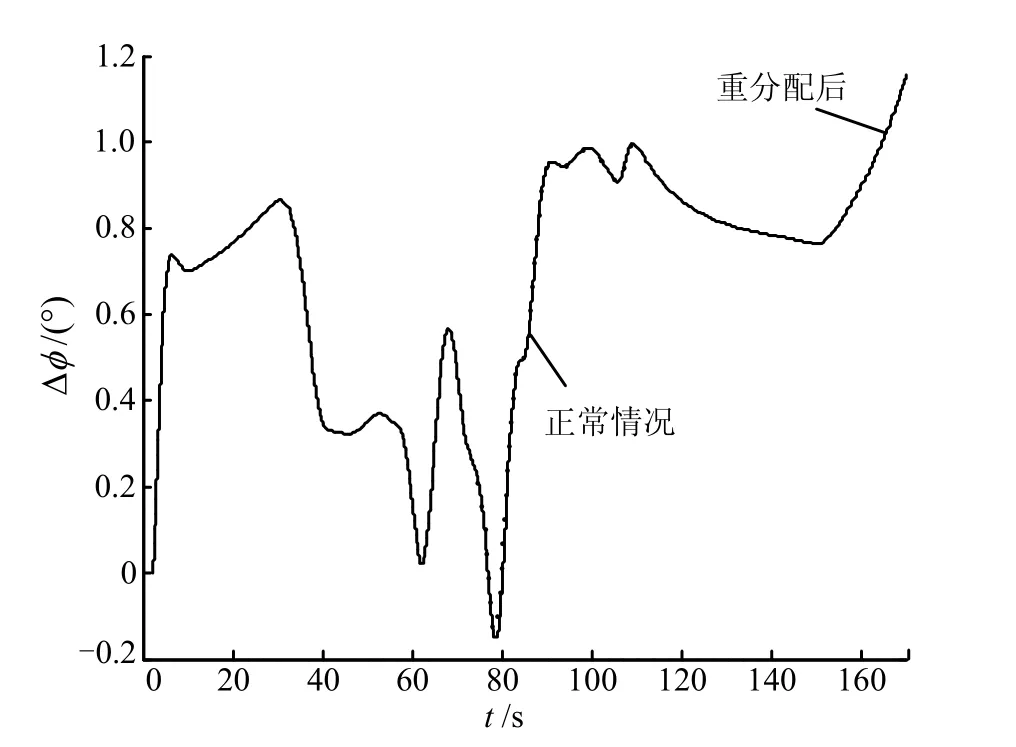
圖2 俯仰角偏差
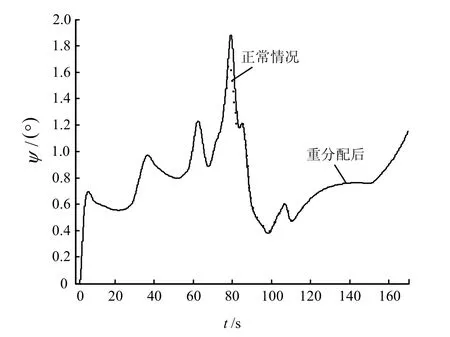
圖3 偏航角偏差

圖4 滾動(dòng)角偏差

圖5 芯級(jí)發(fā)動(dòng)機(jī)擺角
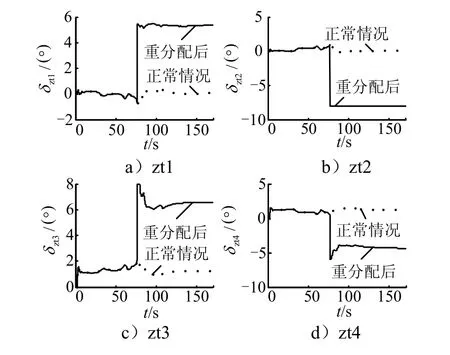
圖6 助推發(fā)動(dòng)機(jī)擺角
從圖2~6可知,本文所提出的芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合重分配方案可以有效消除一臺(tái)伺服機(jī)構(gòu)卡死故障的影響,從而實(shí)現(xiàn)姿控系統(tǒng)穩(wěn)定。
4 結(jié) 論
本文提出了一種能夠適應(yīng)運(yùn)載火箭伺服機(jī)構(gòu)卡死故障的控制指令重分配技術(shù)。該方法針對(duì)捆綁運(yùn)載火箭利用芯級(jí)和助推發(fā)動(dòng)機(jī)聯(lián)合搖擺進(jìn)行姿態(tài)控制的特點(diǎn),通過(guò)對(duì)芯級(jí)和助推發(fā)動(dòng)機(jī)指令擺角的重分配,使運(yùn)載火箭芯級(jí)和助推發(fā)動(dòng)機(jī)產(chǎn)生的總控制力矩在故障發(fā)生前后保持不變,從而實(shí)現(xiàn)控制系統(tǒng)的容錯(cuò)控制。本文所提出的方法根據(jù)擺角限幅值確定分配系數(shù),可以最大程度的解決指令重分配后的擺角限幅問(wèn)題。仿真結(jié)果表明,所提出的方法可以有效消除一臺(tái)伺服機(jī)構(gòu)卡死故障的影響,從而實(shí)現(xiàn)姿控系統(tǒng)的穩(wěn)定。
[1]朱心中, 劉春生. 基于控制分配的多操縱面戰(zhàn)斗機(jī)重構(gòu)控制研究及應(yīng)用[J]. 東南大學(xué)學(xué)報(bào)(自然科學(xué)版), 2010, 40(S1): 162-166.
[2]崔玉偉, 章衛(wèi)國(guó), 李廣文, 史靜平. 基于線性規(guī)劃的多操縱面重構(gòu)控制研究[J]. 飛行力學(xué), 2011, 29(2): 41-44.
[3]Ken B, John B. Control allocation for the X-35B[R]. AIAA 2002-6020, 2002.
[4]Hammad A, Trevor M Y, Daniel T, Edin O. Control allocation with actuator dynamics for aircraft flight controls[R]. AIAA 2007-7828, 2007.
[5]吳燕生, 何麟書(shū). 新一代運(yùn)載火箭姿態(tài)控制技術(shù)[J]. 北京航空航天大學(xué)學(xué)報(bào), 2009, 35(11): 1294-1297.
[6]龍樂(lè)豪. 液體導(dǎo)彈與運(yùn)載火箭系列總體設(shè)計(jì)[M]. 北京: 宇航出版社, 2001.
Research on Reconfigurable Control Allocation Technology under Stuck Actuator Failures
Cheng Tang-ming1,2, Chen Yu2
(1. College of Aerospace and Material Engineering, National University of Defense Technology, Changsha, 410073; 2. Beijing Institute of Astronautical Systems Engineering, Beijing, 100076)
The reconfigurable control allocation technology under stuck actuator failures is proposed in this paper. During the design of tradition launch vehicle control system, the actuator control command signal is confirmed without consideration the actuator failures. So the attitude of launch vehicle is unstable under stuck actuator failures. To improve the safety and reliability of the launch vehicle, the reconfigurable control allocation technology is used and control command signals of the other actuators are reconfigured according to one stuck angle. The simulation results demonstrate that this approach can guarantee that the attitude of launch vehicle is stable without control parameter redesigned.
Launch vehicle; Reconfigurable control allocation; Attitude control
V448.1
A
1004-7182(2017)01-0051-05
10.7654/j.issn.1004-7182.20170113
2016-01-09;
2017-01-13
程堂明(1972-),男,博士研究生,研究員,主要研究方向?yàn)檫\(yùn)載火箭總體設(shè)計(jì)
猜你喜歡
鐵道通信信號(hào)(2020年9期)2020-02-06 09:15:22
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車(chē)維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車(chē)維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01