定子齒結(jié)構(gòu)TRUM離散化動力學(xué)分析方法*
2017-04-27 07:50:31孫鶴旭李國慶
振動、測試與診斷 2017年2期
關(guān)鍵詞:界面
孫鶴旭, 荊 鍇, 董 硯, 李國慶
(1.河北工業(yè)大學(xué)控制科學(xué)與工程學(xué)院 天津,300130) (2.河北省控制工程技術(shù)研究中心 天津,300130) (3.河北科技大學(xué)電氣工程學(xué)院 石家莊,050018)
?
定子齒結(jié)構(gòu)TRUM離散化動力學(xué)分析方法*
孫鶴旭1,2,3, 荊 鍇1,2, 董 硯1,2, 李國慶1,2
(1.河北工業(yè)大學(xué)控制科學(xué)與工程學(xué)院 天津,300130) (2.河北省控制工程技術(shù)研究中心 天津,300130) (3.河北科技大學(xué)電氣工程學(xué)院 石家莊,050018)
基于目前行波型旋轉(zhuǎn)超聲電機(jī)定轉(zhuǎn)子非線性接觸動力學(xué)理論研究的復(fù)雜性,提出一種簡易求解的界面離散化動力學(xué)分析方法。首先,著眼于定子齒的離散分布特性,化定轉(zhuǎn)子齒面接觸為離散點接觸,在定子齒與轉(zhuǎn)子的不同接觸狀態(tài)下,通過引入等效剛度的概念,對定子齒與轉(zhuǎn)子間的軸向作用力進(jìn)行求解,從而獲得定轉(zhuǎn)子的離散等效作用力,確立定轉(zhuǎn)子的相對運(yùn)動關(guān)系;然后,從離散接觸點的三維運(yùn)動特性出發(fā),分析接觸過程中的徑向和周向摩擦力,從而研究輸出機(jī)械特性和界面能耗;最后,通過仿真和實驗,驗證了該方法對接觸界面動力學(xué)的準(zhǔn)確描述。
行波型旋轉(zhuǎn)超聲波電機(jī); 定子齒; 接觸界面; 離散化; 動力學(xué)
引 言
行波型旋轉(zhuǎn)超聲電機(jī)(travelling-wave rotary ultrasonic motor,簡稱TRUM)是超聲電機(jī)中最具代表性的一種,其原理是通過對壓電振子施加兩相高頻電壓,激發(fā)定子超聲波頻段的微幅行波振動,利用定、轉(zhuǎn)子的接觸摩擦作用,驅(qū)動轉(zhuǎn)子旋轉(zhuǎn)并輸出轉(zhuǎn)矩[1]。其中,定轉(zhuǎn)子的接觸作用是電機(jī)輸出轉(zhuǎn)矩的關(guān)鍵,但由于接觸過程機(jī)理復(fù)雜,且具有很強(qiáng)的非線性,其機(jī)理描述和動力學(xué)求解方法十分復(fù)雜,不利于TRUM的深入研究。
目前,國內(nèi)外大多對定轉(zhuǎn)子接觸的動力學(xué)研究是基于Hagood模型進(jìn)行的[2-3],模型依據(jù)“剛性定子-彈性轉(zhuǎn)子”的假設(shè),從沿圓周展開的二維坐標(biāo)研究接觸界面的動力學(xué)關(guān)系。這樣的研究忽略了定子齒結(jié)構(gòu)的作用,也未考慮定子徑向的運(yùn)動,盡管做了許多簡化,但其方法仍然復(fù)雜。此外,文獻(xiàn)[4-5]提出剛性轉(zhuǎn)子與定子的理想單點接觸分析方法,陳超等[6-7]提出了TRUM半解析模型,劃分定子子結(jié)構(gòu),基于定轉(zhuǎn)子三維運(yùn)動采用有限元方法分析定子齒的運(yùn)動和定轉(zhuǎn)子的接觸動力學(xué)關(guān)系。文獻(xiàn)[8]提出定轉(zhuǎn)子接觸作用的等效電路模型,以電學(xué)量類比機(jī)械量,對接觸界面動力學(xué)特性進(jìn)行分析研究,此方法求解亦相對復(fù)雜。文獻(xiàn)[9-10]均采用了實驗的方法從振動模態(tài)的角度分析接觸作用。
有限元方法在TRUM定轉(zhuǎn)子的接觸研究中具有重要的意義。文獻(xiàn)[11]采用有限元分析了定轉(zhuǎn)子接觸特性。周盛強(qiáng)等[12-13]在ANSYS環(huán)境下分析了定轉(zhuǎn)子穩(wěn)定工作時接觸面空間域特性。有限元方法由于求解復(fù)雜,計算耗時,通常需借助一些商業(yè)軟件完成,故不便于TRUM定轉(zhuǎn)子接觸界面動力學(xué)的研究,通常更適合穩(wěn)態(tài)分析[14]和電機(jī)結(jié)構(gòu)優(yōu)化[15]等。
根據(jù)TRUM定子表面齒狀結(jié)構(gòu)帶來的接觸面不連續(xù)的特點,提出一種基于定子齒結(jié)構(gòu)的界面離散化動力學(xué)研究方法。該方法以每個定子齒作為計算單元,化定子齒面接觸為離散點接觸,從而求解不同接觸狀態(tài)下的接觸區(qū)域和軸向等效壓力,進(jìn)而根據(jù)離散接觸點的三維運(yùn)動,推導(dǎo)接觸摩擦力,計算輸出轉(zhuǎn)矩,獲得整個定轉(zhuǎn)子接觸界面的動力學(xué)輸出特性。該方法采用離散化接觸的等效手段,在簡化計算的同時,保證了接觸機(jī)理性能的真實性和準(zhǔn)確性。
1 定轉(zhuǎn)子接觸動力學(xué)基礎(chǔ)
當(dāng)給電機(jī)A,B兩相施加電壓,定子被激出兩相模態(tài)w=[wA,wB]T,并滿足如下機(jī)電耦合方程
(1)
其中:Ms,Ds和Cs分別為兩相模態(tài)質(zhì)量矩陣、阻尼矩陣和模態(tài)剛度矩陣;Θ為機(jī)電耦合系數(shù);u為兩相激勵電壓;FC為界面接觸模態(tài)力。

(2)

對于平均半徑rc、定子齒軸向位置zc的接觸環(huán)面來說,接觸點的軸向位移us z以及徑向、周向速度vs r和vs θ是接觸分析中的3個重要變量。
定轉(zhuǎn)子接觸過程中認(rèn)為定子與轉(zhuǎn)子均是剛性的,受定子振動而發(fā)生形變的是附著于轉(zhuǎn)子下表面與定子接觸的寬為b、厚為h的摩擦襯墊。在定子接觸面3維運(yùn)動的作用下,轉(zhuǎn)子存在軸向和周向兩個自由度的運(yùn)動,其運(yùn)動平衡方程為
其中:MR,DR,JR分別為轉(zhuǎn)子的質(zhì)量、軸向阻尼以及轉(zhuǎn)動慣量;zR,ωR為轉(zhuǎn)子軸向位移和旋轉(zhuǎn)角速度;Fz,Te分別為對轉(zhuǎn)子產(chǎn)生的軸向作用力和輸出轉(zhuǎn)矩;Fa,Tload分別為轉(zhuǎn)子所受預(yù)壓力和負(fù)載轉(zhuǎn)矩。
2 定轉(zhuǎn)子接觸界面的離散化作用
2.1 接觸界面的離散化
如圖1所示,定轉(zhuǎn)子的接觸作用僅存在于m個定子齒與平均半徑為rc的轉(zhuǎn)子環(huán)形摩擦層之間,接觸面不再是連續(xù)的。筆者提出將每個齒接觸面上的相互作用關(guān)系等效離散化為點點接觸的關(guān)系,從而通過求解離散點的接觸作用來研究定轉(zhuǎn)子間的動力學(xué)關(guān)系。

圖1 TRUM接觸界面的離散化Fig.1 Discretization of the TRUM contact interface

(5)

(6)
2.2 軸向壓力和接觸邊界的離散化動態(tài)求解
TRUM定轉(zhuǎn)子接觸狀態(tài)可分為未加電壓時的靜態(tài)接觸和施加電壓產(chǎn)生模態(tài)振動時的動態(tài)接觸兩種狀態(tài)。從離散化的定轉(zhuǎn)子接觸關(guān)系可知,無論哪種狀態(tài)下定子對轉(zhuǎn)子的軸向作用力為
(7)

靜態(tài)接觸下,如圖2(a)所示,由于轉(zhuǎn)子受預(yù)壓力Fa的作用壓在定子上,摩擦層在各齒的范圍上形變量均相同,記作z0,則
(8)
由靜態(tài)受力平衡Fz=Fa得
(9)

圖2 TRUM定轉(zhuǎn)子接觸接觸狀態(tài)Fig.2 Contact state of the stator and rotor of TRUM
動態(tài)接觸下,如圖2(b)所示,轉(zhuǎn)子摩擦層在定子振動的作用下被壓縮,計算各個離散接觸點軸向壓力所需的各點摩擦層形變量,通常參考于摩擦層的未形變面軸向位移,也就是接觸邊界θ0的軸向位移
(10)
離散化的每個齒在其范圍θt上的有效接觸面將因接觸狀況不同而不同,存在以下3種情況:
1) 全接觸
定子齒j在θt上完全與摩擦層接觸,如果假設(shè)摩擦層形變在該區(qū)域上呈線性分布,則
(11)
(12)
2) 部分接觸
如圖3所示,θ0位于定子齒j的范圍內(nèi),實際接觸面僅為θ0左側(cè)的一部分,依線性化近似求解
(13)
圖3 部分接觸時等效求解Fig.3 Equivalent calculation when partial contacting
由于式(13)中存在極限
(14)
不便于求解,于是取等效剛度
(15)
則式(13)變?yōu)?/p>
(16)
3) 不接觸
(17)
綜合3種情況,動態(tài)接觸下的軸向壓力Fz為
(18)


圖4 等效剛度分布曲線Fig.4 Curve of the equivalent stiffness
在軸向動態(tài)方程中,許多研究中認(rèn)為zR就是上述分析中的z1,然而,z1只是zR的中動態(tài)位移,其中還包括定轉(zhuǎn)子從靜態(tài)接觸向動態(tài)接觸過渡時,摩擦層從靜態(tài)壓縮恢復(fù)到未形變狀態(tài)的位移,數(shù)值等于z0,故zR=z1+z0。當(dāng)預(yù)壓力Fa不變時,z0為常數(shù),式中zR的微分與z1的相同。于是將式(18)代入式(3)整理得
(19)
且有
(20)
其中:MR,DR均為正常數(shù);CR>0,因不同接觸情況而變化。
于是該動態(tài)傳遞函數(shù)的特征方程一定有兩個負(fù)根,故該系統(tǒng)是穩(wěn)定收斂的,就可動態(tài)地計算z1,從而實現(xiàn)接觸邊界θ0的求解。由于采用了離散化的計算方法,并且通過合理近似保證了求解的準(zhǔn)確,整個計算過程較解析法、有限元法均要簡單。
2.3 定轉(zhuǎn)子接觸摩擦的離散化及轉(zhuǎn)矩輸出
定轉(zhuǎn)子間的摩擦作用,經(jīng)接觸點離散,各點對轉(zhuǎn)子的切向摩擦力與軸向壓力成正比
(21)
其中:μ為定子與轉(zhuǎn)子摩擦層的動摩擦因數(shù)。
當(dāng)轉(zhuǎn)子所受摩擦力的方向取決于接觸點的運(yùn)動方向,根據(jù)式(2)離散接觸點的徑向、周向速度可表示為
(22)

(23)
其中:徑向摩擦力不對轉(zhuǎn)子做功,僅僅產(chǎn)生損耗;周向摩擦力所做的功取決于離散點處vs θ-vR的方向。周向摩擦力產(chǎn)生輸出轉(zhuǎn)矩為
(24)

圖5 界面離散接觸摩擦作用示意圖Fig.5 The friction on the interface
2.4 接觸界面能量損耗及輸出效率
定、轉(zhuǎn)子接觸作用的能量損耗是由于定、轉(zhuǎn)子在徑向和周向相對滑動摩擦而引起的,如果按一個電周期T平均,摩擦損耗分別為
(25)
于是電機(jī)界面接觸總的摩擦損耗為
(26)
由電機(jī)的輸出功率為
(27)
可得電機(jī)接觸界面能量傳遞的效率為
(28)
以上可見,TRUM接觸界面的動力學(xué)離散化計算推導(dǎo)相比解析、有限元方法,更能簡易、清晰地反映出TRUM接觸界面的動力學(xué)特征,為TRUM的接觸研究提供便利的方法。
3 離散化接觸界面動力學(xué)仿真與實驗
以TRUM-60型電機(jī)為例,電機(jī)參數(shù)見表1。
表1 電機(jī)參數(shù)表
Tab.1 Parameters of the TRUM
參數(shù)數(shù)值振波數(shù)k9定子齒數(shù)m72轉(zhuǎn)子半徑rc/mm27.58摩擦層厚度h/mm2.74摩擦層寬度b/mm0.2彈性模量E/MPa280摩擦因數(shù)μ0.2
在Matlab/Simulink仿真環(huán)境下對該電機(jī)的接觸界面特性以及輸出機(jī)械特性進(jìn)行驗證。
3.1 界面特性仿真
電機(jī)工作在B09模態(tài),根據(jù)定子齒數(shù)m=72,則按定子齒離散后,一個振動波長下覆蓋l=8個離散點。預(yù)置振動模態(tài)幅值W=1.1 μm,頻率40 kHz,施加預(yù)壓力為Fa=160 N。根據(jù)界面離散化動力學(xué)分析研究方法,將研究定轉(zhuǎn)子接觸界面上離散點軸向位移,軸向壓力,徑向、周向速度和徑向、周向摩擦力等動力學(xué)特性。


圖6 離散化界面接觸特性Fig.6 Contact characteristics of the discretized interface
3.2 機(jī)械特性仿真及實驗對比
當(dāng)TRUM的材料、結(jié)構(gòu)已確定的情況下,預(yù)壓力是影響電機(jī)機(jī)械特性的惟一可調(diào)整的參數(shù)。圖7示出不同預(yù)壓力下的機(jī)械特性曲線。
圖7(a)顯示隨著預(yù)壓力增大,空載轉(zhuǎn)速減小,堵轉(zhuǎn)轉(zhuǎn)矩增大,整體機(jī)械特性變硬。而由圖7(b)可以看出,電機(jī)的最大輸出功率隨預(yù)壓力增大向右移,最大功率值略有減小。
界面周向和徑向的損耗如圖7(c)所示,周向損耗隨負(fù)載轉(zhuǎn)矩增加而增加,徑向損耗隨轉(zhuǎn)矩略有減小,隨著預(yù)壓力增大兩種損耗也相應(yīng)增加。效率曲線如圖7(d)所示,隨著預(yù)壓力的增大,最大效率點右移但逐漸減小。
從仿真結(jié)果看,筆者提出的分析方法對TRUM的特性具有良好的描述,對比目前在界面動力學(xué)分析中常用的有限元法[6,12],本分析方法在運(yùn)算上更加簡單易行,不失描述的準(zhǔn)確性。通過圖8所示的仿真實驗對比曲線更能說明這一點,其中“×”為利用測功機(jī)多次實驗測量獲得的數(shù)值。實驗數(shù)據(jù)與仿真曲線較為契合,證明了通過接觸界面的離散分析,亦可真實描述TRUM定轉(zhuǎn)子接觸界面的運(yùn)動、力學(xué)關(guān)系。

圖7 不同預(yù)壓力下電機(jī)輸出機(jī)械特性Fig.7 Mechanical characteristics in different pre-pressures
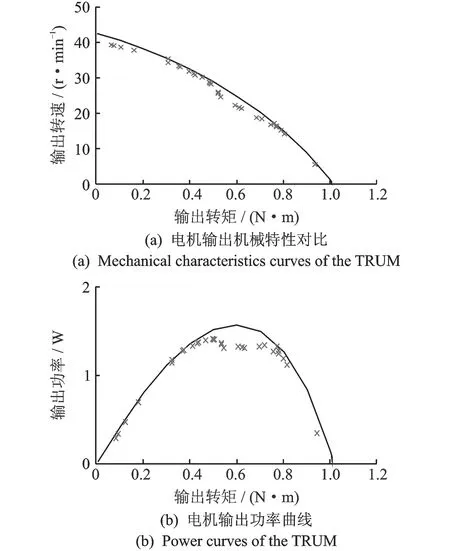
圖8 電機(jī)機(jī)械特性的模型仿真與實驗結(jié)果對比Fig.8 Mechanical characteristics comparison of the simulations and the experiments
4 結(jié)束語
筆者提出了一種TRUM定轉(zhuǎn)子接觸界面的離散化動力學(xué)分析方法,以不連續(xù)分布的定子齒結(jié)構(gòu)為研究單元,化面接觸為點接觸,有效降低了接觸作用力求解的復(fù)雜度,并結(jié)合定轉(zhuǎn)子三維運(yùn)動,準(zhǔn)確地對離散化的接觸點的動力學(xué)關(guān)系進(jìn)行描述,從而為TRUM接觸界面動力學(xué)研究提供了理論方法。最后通過仿真及實驗對比,驗證了方法對電機(jī)接觸界面動力學(xué)描述的準(zhǔn)確性和真實性。
[1] 趙淳生.超聲電機(jī)技術(shù)與應(yīng)用[M].北京:科學(xué)出版社,2007:162-163.
[2] Hagood N W I, Mcfarland A J. Modeling of a piezoelectric rotary ultrasonic motor[J]. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 1995, 42(2):210-224.
[3] Zhu Meiling. Contact analysis and mathematical modeling of traveling wave ultrasonic motors[J]. IEEE Transactions on Ultrasonics Ferroelectrics & Frequency Control, 2004, 51(6):668-679.
[4] Lemaire-Semail B. Causal modeling and identification of a travelling wave ultrasonic motor[J]. European Physical Journal Applied Physics, 2003, 21(2):151-159.
[5] Giraud F, Lemaire-Semail B, Aragones J, et al. Stability analysis of an ultrasonic motor for a new wave amplitude control[J]. IEEE Transactions on Industry Applications, 2009, 45(4): 495-501.
[6] 陳超, 趙淳生.旋轉(zhuǎn)型行波超聲電機(jī)中三維接觸機(jī)理的研究[J]. 中國電機(jī)工程學(xué)報, 2006, 26(21): 149-155.
Chen Chao,Zhao Chunsheng. Study on the three dimensional contact mechanism of traveling wave type rotary ultrasonic motor [J]. Proceedings of the CSEE, 2006,26(21): 149-155. (in Chinese)
[7] 陳超, 曾勁松, 趙淳生. 旋轉(zhuǎn)型行波超聲電機(jī)理論模型的仿真研究[J]. 振動與沖擊, 2006, 25(2): 129-133.
Chen Chao, Zeng Jinsong, Zhao Chunsheng. Study on the analytical model of the rotary traveling wave type ultrasonic motor[J]. Journal of Vibration and Shock, 2006, 25(2): 129-133. (in Chinese)
[8] 顏佳佳, 阮新波.旋轉(zhuǎn)型行波超聲電機(jī)的等效電路模型[J].中國電機(jī)工程學(xué)報, 2009, 29(15): 80-87.
Yan Jiajia, Ruan Xinbo. Electrical equivalent circuit model of traveling wave rotary ultrasonic motor [J]. Proceedings of the CSEE, 2009, 29(15): 80-87. (in Chinese)
[9] 姚志遠(yuǎn),吳辛,趙淳生.行波超聲電機(jī)定、轉(zhuǎn)子接觸狀態(tài)試驗分析[J] .振動、測試與診斷, 2009, 29(4): 388-391.
Yao Zhiyuan, Wu Xin, Zhao Chunsheng. Test of contact interface properties of stator and rotor in travel ling wave ultrasonic motors[J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29(4):388-391. (in Chinese)
[10]王寅, 金家楣, 黃衛(wèi)清. 一種面內(nèi)行波旋轉(zhuǎn)超聲電機(jī)的模態(tài)試驗方法[J]. 振動、測試與診斷, 2011, 31(5): 596-599.
Wang Yin, Jin Jiamei, Huang Weiqing. Modal testing method for rotary ultrasonic motor using in-plane travelling wave[J].Journal of Vibration, Measurement & Diagnosis, 2011, 31(5): 596-599. (in Chinese)
[11]Shen Shengnan, Lee H P, Lim S P, et al. Contact mechanics of traveling wave ultrasonic motors[J]. IEEE Transactions on Magnetics, 2013,49(6): 2634-2637.
[12]周盛強(qiáng), 趙淳生, 黃衛(wèi)清. 旋轉(zhuǎn)型行波超聲電機(jī)接觸界面的空間域分析[J].中國電機(jī)工程學(xué)報, 2010, 30(12): 63-68.
Zhou Shengqiang, Zhao Chunsheng, Huang Weiqing. Contact analysis of traveling wave type rotary ultrasonic motor in space domain[J]. Proceedings of the CSEE, 2010, 30(12): 63-68. (in Chinese)
[13]周盛強(qiáng), 趙淳生. 超聲電機(jī)接觸界面的兩種簡化有限元模型[J]. 振動、測試與診斷, 2009, 29(3): 251-255.
Zhou Shengqiang, Zhao Chunsheng. Two simplified finite element models for contact analysis of ultrasonic motor [J]. Journal of Vibration, Measurement & Diagnosis, 2009, 29(3): 251-255. (in Chinese)
[14]Frangi A, Corigliano A, Binci M, et al. Finite element modelling of a rotating piezoelectric ultrasonic motor[J]. Ultrasonics, 2005, 43(9): 747-755.
[15]Bolborici V, Dawson F P, Pugh M C. A finite volume method and experimental study of a stator of a piezoelectric traveling wave rotary ultrasonic motor[J]. Ultrasonics, 2013, 54(3): 809-820.

*河北省自然科學(xué)基金資助項目(E2013202108);河北省研究生創(chuàng)新資助項目(2015);河北省重大科技成果轉(zhuǎn)化資助項目(13041709Z)
2015-08-20;
2015-10-23
10.16450/j.cnki.issn.1004-6801.2017.02.028
TH113; TM356
孫鶴旭,男,1956年8月生,博士、教授、博士生導(dǎo)師。主要研究方向為運(yùn)動控制、工程系統(tǒng)與控制。曾發(fā)表《Current dynamically predicting control of PMSM targeting the current vectors》(《Journal of Electrical Engineering & Technology》2015, Vol.10,No.3)等論文 E-mail:hxsun@hebust.edu.cn
猜你喜歡
艦船科學(xué)技術(shù)(2022年16期)2022-09-22 02:15:00
北京航空航天大學(xué)學(xué)報(2021年6期)2021-07-20 07:23:54
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
制造技術(shù)與機(jī)床(2017年11期)2017-12-18 06:47:29
金秋(2017年4期)2017-06-07 08:22:16
蘇州科技大學(xué)學(xué)報(自然科學(xué)版)(2017年1期)2017-03-20 15:25:18
中國材料進(jìn)展(2016年10期)2016-12-26 06:50:20
濰坊學(xué)院學(xué)報(2016年2期)2016-12-01 13:00:11
新聞傳播(2015年11期)2015-07-18 11:15:04
