雙模導(dǎo)引頭高度定位系統(tǒng)的研究與實現(xiàn)
2017-05-03 00:56:15易義芬安學(xué)智程曉莉
彈箭與制導(dǎo)學(xué)報 2017年4期
關(guān)鍵詞:測量
易義芬, 安學(xué)智, 袁 霖, 程曉莉, 王 誠, 陳 亮
(1 西安現(xiàn)代控制技術(shù)研究所, 西安 710065; 2 西安應(yīng)用光學(xué)研究所, 西安 710072;3 西北工業(yè)大學(xué)軟件與微電子學(xué)院, 西安 710065)
0 引言
雙模導(dǎo)引頭飛行高度精確測量與控制在目標(biāo)搜索與識別、戰(zhàn)場環(huán)境偵查、導(dǎo)引頭航姿遙測等飛行任務(wù)中起著至關(guān)重要的作用,主要由高度定位系統(tǒng)實現(xiàn)。傳統(tǒng)的高度測量系統(tǒng)多數(shù)采用靜壓傳感器的壓差膜盒對大氣靜壓進(jìn)行探測,輸出大氣壓模擬信號,并轉(zhuǎn)換為相應(yīng)海拔高度值,并未考慮地面大氣溫度、濕度等因素,以至于輸出的靜態(tài)大氣壓值與真實大氣壓值之間有偏差[1],存在測量精度低、一致性差等問題。另一方面隨著電子科技迅速發(fā)展、戰(zhàn)場環(huán)境復(fù)雜多變、信息對抗與反對抗不斷增強,對導(dǎo)引頭在現(xiàn)實環(huán)境中的適應(yīng)性、生存力提出嚴(yán)格的要求,小型化、集成化、智能化、模塊化是導(dǎo)引頭發(fā)展必然趨勢[2-3],然而傳統(tǒng)高度測量系統(tǒng)大多數(shù)存在電子集成度低、體積大和功耗高、環(huán)境適應(yīng)性弱、實時同步性差等問題。
針對上述問題,研究一種電子器件集成小型化和模塊化、測量精準(zhǔn)度高、環(huán)境適應(yīng)性強的高位測量系統(tǒng)成為亟需解決的問題。文中設(shè)計并實現(xiàn)了一種具有大氣壓與溫度測量、溫度補償、大氣壓濾波、大氣壓高度轉(zhuǎn)換、與經(jīng)緯度測量數(shù)值實時同步的高度定位系統(tǒng),該系統(tǒng)將電源組件模塊、大氣壓與溫度采集模塊、數(shù)據(jù)處理模塊、存儲與通訊模塊高度集成于一體。其集成電路結(jié)構(gòu)簡單、功耗和成本低、大氣壓高度轉(zhuǎn)換率高、響應(yīng)速度快、輸出數(shù)據(jù)可靠穩(wěn)定等特點,適合雙模導(dǎo)引頭飛行海拔高度的測量和操控。
1 系統(tǒng)硬件設(shè)計
高度定位系統(tǒng)由電源組件模塊、大氣壓與溫度采集模塊、數(shù)據(jù)處理模塊、存儲模塊和通訊模塊組成,其硬件組成見圖1。電源組件模塊包括FPGA與FLASH供電單元、存儲器與MS5534B供電單元,分別輸出1.8 V、3.3 V和5 V穩(wěn)定電壓;大氣壓與溫度采集模塊感應(yīng)大氣壓和溫度差分模擬信號,經(jīng)過ADC轉(zhuǎn)換和數(shù)據(jù)濾波處理輸出數(shù)字信號;存儲模塊存儲備份海拔高度和采集時間,供雙模導(dǎo)引頭地面遙測系統(tǒng)查看與使用;數(shù)據(jù)處理模塊是高度定位系統(tǒng)的處理核心,獲取絕對非補償?shù)拇髿鈮骸囟纫约把a償參數(shù),進(jìn)行溫度補償、軟件濾波和大氣壓高度轉(zhuǎn)換間接得到測量高度數(shù)據(jù);通訊模塊包括SPI通訊單元和RS422通訊單元,完成高度定位系統(tǒng)與數(shù)字壓力傳感器、雙模導(dǎo)引頭飛行操控系統(tǒng)之間數(shù)據(jù)傳輸與控制、采集時間實時同步等功能。
圖1 硬件系統(tǒng)組成框圖
1.1 數(shù)字壓力傳感器
MS5534B是瑞士Intersema公司生產(chǎn)的一款集成有壓阻式壓力傳感器和ADC接口的SMD混合集成電路,內(nèi)部集成了壓阻式壓力傳感器、電阻式溫度傳感器、數(shù)字選擇器、15 bit模數(shù)轉(zhuǎn)換器、數(shù)字濾波器及數(shù)據(jù)存儲器模塊[4],其結(jié)構(gòu)見圖2。大氣壓和溫度測量使用同一個Σ-Δ型15 bit ADC,測量大氣壓時,ADC轉(zhuǎn)換傳感器的差分模擬輸出電壓,測量溫度時,ADC則感應(yīng)和轉(zhuǎn)換傳感器電橋的電阻,在兩種測量期間,傳感器通過多路選擇開關(guān)(Input MUX)用很短的切換時間完成。經(jīng)過ADC分別將大氣壓和溫度的差分模擬信號轉(zhuǎn)換為數(shù)字信號,再通過數(shù)字濾波器(Digital Filter)抑制干擾,然后將16 bit大氣壓和溫度數(shù)據(jù)存貯在數(shù)字IC模塊中。針對大氣壓測量和溫度測量分別在MS5534B的PROM中寫入出廠標(biāo)定的4個16 bit校正字WORD1~WORD4,其中逐位邏輯移位組合6個參數(shù)C1~C6,主要用于修正由溫度變化引起實際大氣壓與測量大氣壓之間存在的誤差。
圖2 MS5534B內(nèi)部結(jié)構(gòu)圖
1.2 FPGA微處理器
FPGA微處理器采用Xilinx公司生產(chǎn)的Spartan-6系列XC6SLX45T芯片,具有功耗低、速度快、可配置邏輯模塊多等特點。通過管腳配置成各種通訊標(biāo)準(zhǔn)I/O接口,可以與MS5534B、MAX3940、K9LCG08U1A-M和FLASH管腳直接連接,不需要額外添加電容和電阻,進(jìn)一步簡化電路設(shè)計、降低功耗和成本、減小體積、減輕重量。與FPGA微處理器配套使用的FLASH芯片選用XCF16PVO48I。

1.3 電源組件
選用TI公司生產(chǎn)的TPS70345和TPS76818兩種芯片分別給FPGA微處理器和FLASH閃存提供管理電源解決方案,其中TPS70345產(chǎn)生FPGA所需的3.3 V I/O接口電平和1.2 V內(nèi)核電平,該芯片最大可提供3.3 V電平1 A的輸出電流能力和1.2 V電平2 A的輸出電流能力;TPS76818主要提供FLASH芯片的1.8 V電平,該芯片可提供1.8 V電平1 A的輸出電流能力。選用TI公司的REG117-3.3芯片分別給K9LCG08U1A-M存儲芯片和MS5534B數(shù)字壓力傳感器提供管理電源解決方案,該芯片輸出固定3.3 V電平,最大電流可達(dá)800 mA。
2 系統(tǒng)軟件設(shè)計
系統(tǒng)軟件采用模塊化設(shè)計架構(gòu),主要由初始化模塊、SPI通訊模塊、數(shù)據(jù)處理模塊、數(shù)據(jù)存儲模塊和串口通訊模塊組成,主程序以周期循環(huán)方式實現(xiàn)對各模塊調(diào)用控制。高度定位系統(tǒng)上電后調(diào)用初始化模塊,配置各芯片邏輯單元;通過SPI通訊模塊向MS5534B寫入復(fù)位序列和讀取溫度補償參數(shù)、測量大氣壓和溫度值,并寫入FPGA微處理器的FLASH;通過數(shù)據(jù)處理模塊算出溫度補償后的測量大氣壓值,采用軟件濾波算法抑制噪聲干擾,經(jīng)過大氣壓高度轉(zhuǎn)換算法得到測量高度;通過數(shù)據(jù)存儲模塊將測量高度值和采集時間寫入/讀取存儲芯片;通過串口通訊模塊完成了雙模導(dǎo)引頭飛行操控系統(tǒng)對高度定位系統(tǒng)操作控制,系統(tǒng)軟件運行流程圖見圖3。
圖3 系統(tǒng)軟件運行流程圖
2.1 溫度補償設(shè)計
2.1.1 標(biāo)準(zhǔn)溫度補償
MS5534B主要功能是將壓阻式壓力傳感器感應(yīng)的非補償差分模擬電壓換成測量大氣壓值,然而在實際測量過程中實際大氣壓與測量大氣壓之間存在誤差,見圖4。1)在相同溫度條件下,傳感器輸出測量大氣壓與實際大氣壓之間存在線性關(guān)系;2)在不同溫度且同一實際大氣壓條件下,傳感器輸出測量大氣壓之間存在差異。因此為了消除差異,需要通過補償溫度傳感器感應(yīng)的測量溫度,修正因溫度變化引起壓力傳感器的零漂和靈敏度,從而修正測量大氣壓與實際大氣壓的偏差[5],進(jìn)一步提高測量大氣壓精準(zhǔn)度和靈敏度。
壓力傳感器的溫度補償需要外部微處理器完成,首先通過三線SPI接口向MS5534B發(fā)送復(fù)位序列啟動MS5534B,其次從MS5534B的PROM讀取4個校正字WORD1-WORD4并逐位提取6個參數(shù)C1~C6,最后寫入FPGA微處理器的FLASH。系統(tǒng)測量高度時,FPGA微處理器從MS5534B讀取大氣壓D1和溫度D2,并根據(jù)FLASH中的參數(shù)C1~C6,用MS5534B用戶手冊提供的算法對測量大氣壓進(jìn)行標(biāo)準(zhǔn)溫度補償[6],得到溫度補償后的測量大氣壓P。
圖4 實際大氣壓與測量大氣壓誤差圖
1)計算標(biāo)定溫度
標(biāo)定溫度:UT=8×C5+20 224
2)計算實際溫度
實際溫度與參考溫度之差:dT=D2-UT
實際溫度:TEMP=200+dT×(C6+50)÷212
(0.1 ℃分辨率)
3)計算溫度補償氣壓值
實際溫度偏差:
OFF=C2×4+((C4-512)×dT)÷212
實際溫度靈敏度:
SENS=C1+(C3×dT)÷210+24 576
X=(TSENS×(D1-7 168))÷214-OFF
溫度補償大氣壓:
P=X×10÷25+250×10(10 Pa分辨率)
通過上述標(biāo)準(zhǔn)溫度補償算法消除因溫度傳感器輸出線性關(guān)系導(dǎo)致的誤差,但是在很低或很高溫度環(huán)境中仍然存在誤差,通過二階溫度補償可以進(jìn)一步減小由溫度變化導(dǎo)致的測量誤差。
2.1.2 二階溫度補償
為了在整個溫度變化范圍內(nèi)獲得最佳校正誤差,系統(tǒng)采用二階溫度補償算法[6]消除因溫度傳感器輸出非線性問題導(dǎo)致誤差,此算法根據(jù)測量溫度,在不同范圍采取不同算法算出溫度和大氣壓補償參數(shù),然后用MS5534B輸出的測量溫度和大氣壓減去補償參數(shù),算出經(jīng)過二階溫度補償?shù)臏囟萒EMP和大氣壓P。
1)低溫補償方式(TEMP<200 ℃):
T2=11×(C6+24)×(200-TEMP)2÷220
P2=3×T2×(P-3 500)÷214
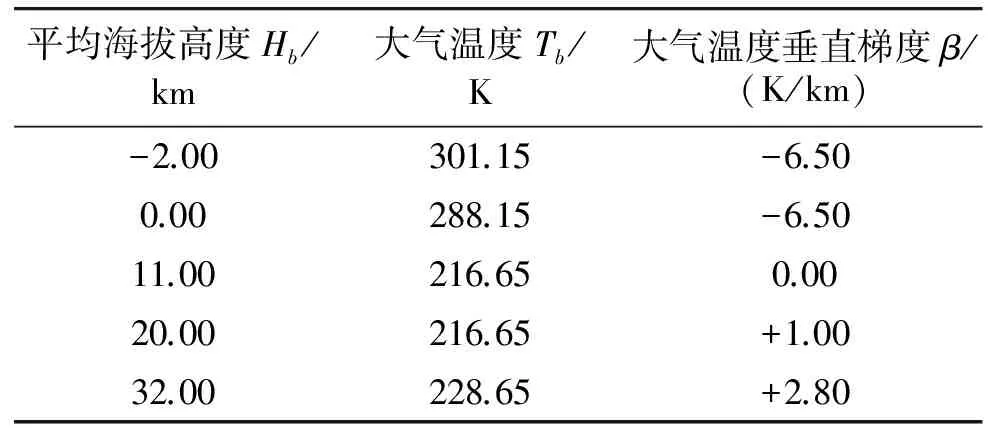
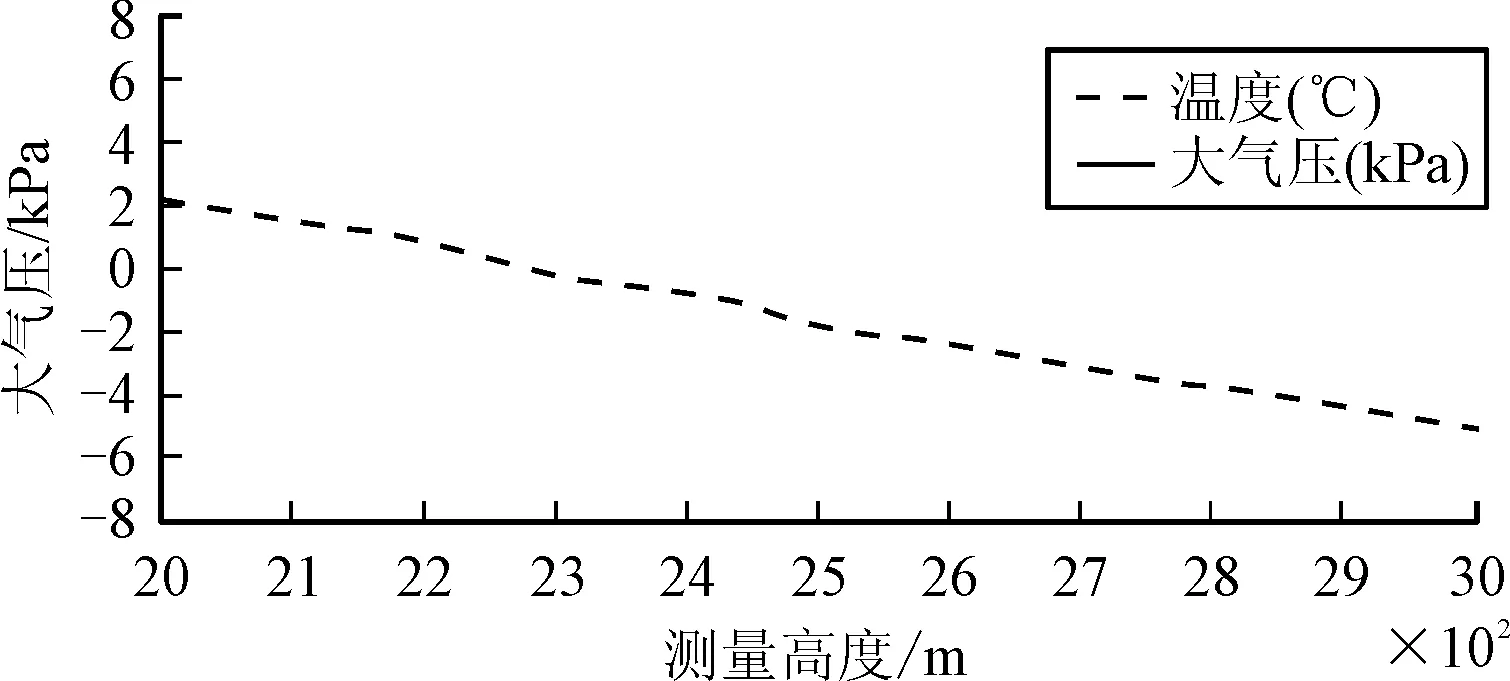
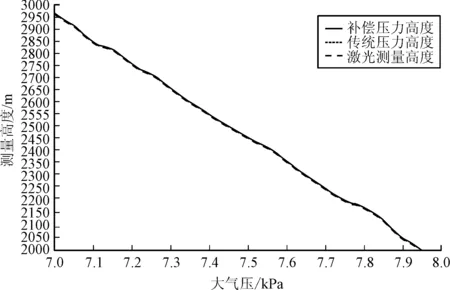
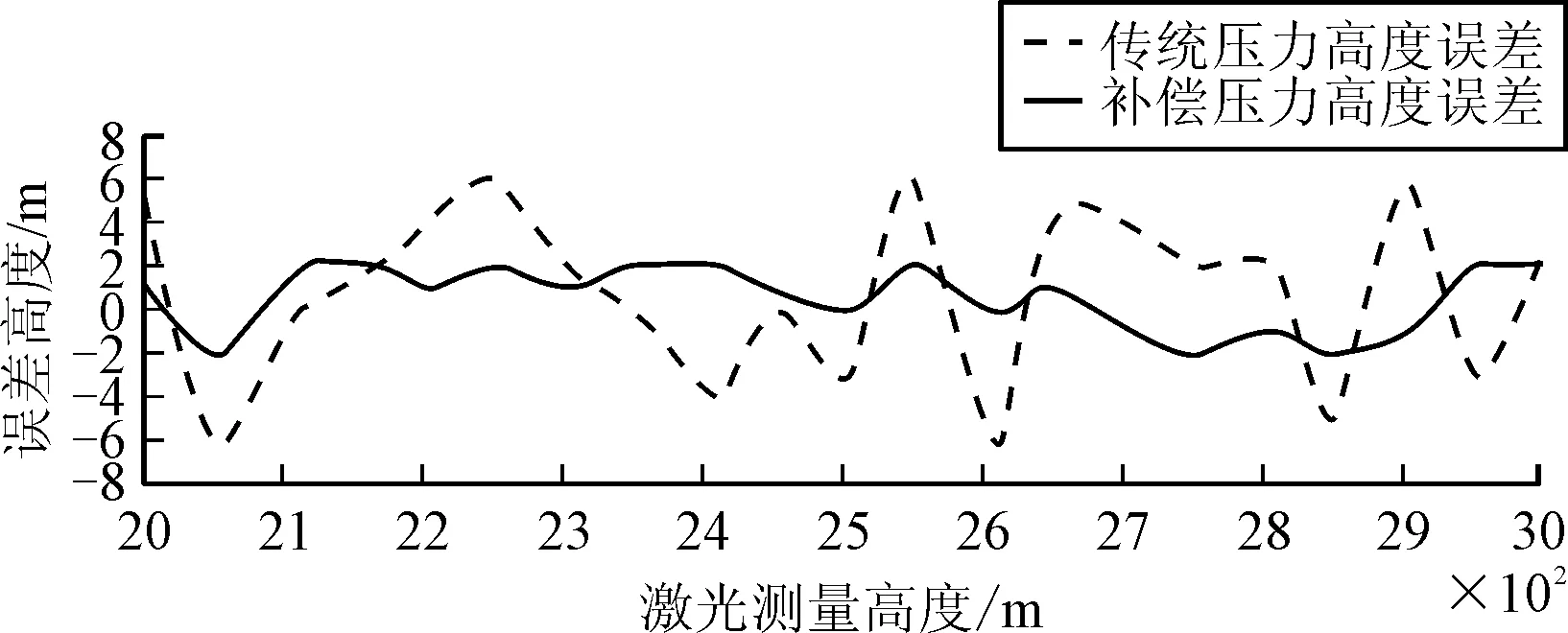
2)不需要補償(200 ℃ T2=0 P2=0 3)高溫補償方式(450 ℃ T2=3×(C6+24)×(450-TEMP)2÷220 P2=T2×(P-10 000)÷213 4)計算測量大氣壓和溫度: TEMP=TEMP-T2 P=P-P2 在溫度很低或者很高的環(huán)境中,二階溫度補償方式尤為有效,可以大幅度減少誤差,見圖5。從圖中得出在正負(fù)極端溫度范圍內(nèi),測量誤差從10 ℃以上降至1 ℃以內(nèi),溫度補償效果非常明顯。 圖5 二階溫度補償效果 為了滿足高精度、高穩(wěn)定性和高可靠性的要求,需要通過數(shù)字濾波器抑制噪聲擾動,即將普通硬件RC低通濾波器的微分方程用差分方程表示,便可用軟件算法模擬硬件濾波的功能[7],低通濾波算法為: Yn=αXn+(1-α)Yn-1 (1) 式中:Yn為本次濾波器輸出值;Xn為MS5534B讀出的測量值;Yn-1為上次濾波器輸出值;α是介于0~1的濾波系數(shù)。濾波系數(shù)的選擇要兼顧數(shù)據(jù)的穩(wěn)定性和海拔高度變化時數(shù)據(jù)的響應(yīng)速度,如果α值太小,提高了數(shù)據(jù)的穩(wěn)定性,但降低了海拔高度變化的響應(yīng)速度[1]。因此濾波系數(shù)α最合適的取值,需要根據(jù)雙模導(dǎo)引頭飛行的實際情況來確定,經(jīng)過50 h以上不同海拔高度飛行測試論證,最終確定α值為0.25,則低通濾波算法簡化為: Yn=0.25Xn+0.75Yn-1 (2) 2.3.1 標(biāo)準(zhǔn)海拔高度 大氣壓高度轉(zhuǎn)換原理是根據(jù)在重力場中大氣壓隨著海拔高度升高逐漸衰減的規(guī)律設(shè)計。但是大氣壓隨海拔高度的變化關(guān)系受到譬如大氣密度、溫度、濕度等諸多因素響應(yīng),公開資料表明海拔高度每升高1 km,相對大氣壓大約降低12%,大氣密度降低20%,絕對濕度隨海拔高度的升高而降低;海拔高度每升高1 km大氣溫度下降5 ℃,最高溫度會降低5 ℃,平均溫度下降5 ℃。因此國際上普遍采用美國頒布的《標(biāo)準(zhǔn)大氣》,該標(biāo)準(zhǔn)將25 km高度以下大氣的大氣層分成兩個區(qū)域:對流層和同溫層。在對流層以內(nèi)海拔高度與大氣溫度呈線性關(guān)系,它的平均海拔高度下限為0 km,而在同溫層大氣溫度則是一個常值,它的平均海拔高度下限為11 km。標(biāo)準(zhǔn)大氣壓高度計算方程如式(3)、式(5),其中β為大氣溫度垂直梯度,溫度越高標(biāo)準(zhǔn)海拔高度越低,不同高度層對于不同溫度梯度,如表1所示。PH為測量大氣壓,不同標(biāo)準(zhǔn)海拔高度對應(yīng)不同測量值。 表1 大氣溫度垂直梯度對應(yīng)表 1)當(dāng)大氣溫度垂直梯度β不為0,標(biāo)準(zhǔn)海拔高度與大氣壓、溫度的關(guān)系為: (3) 根據(jù)式(3)中:Pb=101.325×103Pa為標(biāo)準(zhǔn)海拔高度0 km的標(biāo)準(zhǔn)大氣壓(平均海平面標(biāo)準(zhǔn)大氣壓);R=287.052 78 m2/(Ks2)為空氣氣體常數(shù);gb=9.806 65 m/s2為自由落體重力加速度;β=-0.006 5 K/m為大氣溫度垂直梯度;Tb=288.15 K為標(biāo)準(zhǔn)海拔高度0 km的標(biāo)準(zhǔn)大氣溫度。可以得出標(biāo)準(zhǔn)大氣壓高度近似式: (0 km≤H≤11 km) (4) 2)大氣溫度垂直梯度β為0,標(biāo)準(zhǔn)海拔高度與大氣壓、溫度的關(guān)系為: (5) 根據(jù)式(5)中:Pb=226.32×103Pa為標(biāo)準(zhǔn)海拔高度11 km的標(biāo)準(zhǔn)大氣壓;β=0.00 K/m為大氣溫度垂直梯度;Tb=216.65 K為標(biāo)準(zhǔn)海拔高度11 km的標(biāo)準(zhǔn)大氣溫度。gb和R與式(3)相同,可以得出標(biāo)準(zhǔn)大氣壓高度近似式: (11 km≤H≤25 km) (6) 2.3.2 修正標(biāo)準(zhǔn)海拔高度誤差 標(biāo)準(zhǔn)大氣壓高度轉(zhuǎn)換公式,是假設(shè)大氣壓在垂直方向和水平方向沒有流動的理想標(biāo)準(zhǔn)大氣壓條件下推導(dǎo)得出的。若在雙模導(dǎo)引頭飛行區(qū)域的大氣壓與標(biāo)準(zhǔn)大氣壓不符合的情況下,大氣壓高度轉(zhuǎn)換的測量海拔高度與平均海拔高度存在原理性的誤差,主要由于基準(zhǔn)平面大氣壓變化、溫度變化、溫度梯度變化造成,原理性誤差可由標(biāo)準(zhǔn)壓高公式的增量方程式(7)求得: (7) 通過式(8)、式(9)修正由基準(zhǔn)平面大氣壓變化、溫度變化引起的高度誤差,即提高大氣壓變化量ΔHP0和溫度變化量ΔHT0的測量靈敏度,降低標(biāo)準(zhǔn)大氣壓高度誤差,提高海拔高度測量的分辨率和精準(zhǔn)度。 (8) (9) 圖6 測量高度與大氣壓力和溫度圖 驗證方法是通過火箭撬將攜帶激光測距機的雙模導(dǎo)引頭拋向高空,通過地面遙測監(jiān)視系統(tǒng)對雙模導(dǎo)引頭飛行航姿進(jìn)行控制,同步錄制高度定位系統(tǒng)測量高度值與采集時間、激光測距機測量高度值與采集時間,同時經(jīng)過無線通信模塊下傳到地面遙測監(jiān)視系統(tǒng),以下截取2~3 km部分?jǐn)?shù)據(jù)進(jìn)行說明。圖6中的橫坐標(biāo)表示測量高度,縱坐標(biāo)表示大氣壓力,得出測量高度隨大氣壓和溫度的降低而升高;圖7中橫坐標(biāo)表示大氣壓,縱坐標(biāo)表示測量高度(包括激光測量高度、傳統(tǒng)壓力高度、補償壓力高度),得出壓力高度隨大氣壓降低而升高;圖8中橫坐標(biāo)表示高度誤差,縱坐標(biāo)表示激光測量高度,傳統(tǒng)壓力高度與激光測量高度平均誤差(≤±6 m),補償壓力高度與激光測量高度平均誤差(≤±2 m)。激光器廠商給出激光測距在3 km以下單次照射最大誤差±50 mm,11 km以下連續(xù)照射最大誤差±1 m左右,從而得出高度定位系統(tǒng)與激光測距機的高度誤差在3 km以下最大誤差±2.05 m,11 km以下的最大誤差±3 m,因此高度定位系統(tǒng)的測量高度在3 km以下為最大誤差±2.05 m,11 km以下的最大誤差±4 m,符合雙模導(dǎo)引頭提出的海拔高度精度要求。 圖7 測量高度對比圖 圖8 測量高度誤差圖 文中通過硬件和軟件設(shè)計,實現(xiàn)了一種基于雙模導(dǎo)引頭的高度定位系統(tǒng)。在某型雙模導(dǎo)引頭外場飛控綜合性能測試和模擬打靶功效測試的過程中,對高度定位系統(tǒng)與飛行操控系統(tǒng)在操控實時響應(yīng)速度、復(fù)雜環(huán)境適應(yīng)性能、各系統(tǒng)之間電磁干擾等方面進(jìn)行綜合實效測試,進(jìn)一步驗證了高度定位系統(tǒng)能夠滿足當(dāng)前條件下雙模導(dǎo)引頭提出的集成化、小型化、智能化等需求,具有一定的使用價值和參考性。同時暴露出在硬件和軟件設(shè)計方面存在缺陷,將在某改型多模導(dǎo)引頭研發(fā)過程中逐步進(jìn)行完善。 參考文獻(xiàn): [1] 楊成順, 楊忠, 馬俊, 等. 基于MS5540C的無人機高度傳感器設(shè)計 [J]. 應(yīng)用科技, 2010, 37(8): 26-30. [2] 徐春夷. 國外導(dǎo)引頭技術(shù)現(xiàn)狀及發(fā)展趨勢 [J]. 制導(dǎo)與引信, 2012, 32(2): 11-15. [3] 趙超, 楊號. 紅外復(fù)合制導(dǎo)技術(shù)概述 [J]. 制導(dǎo)與引信, 2007, 28(2): 1-7. [4] 王志剛, 唐飛, 王曉浩, 等. 基于MS5534B的壓力高度計系統(tǒng)的設(shè)計 [J]. 微納電子技術(shù), 2008, 45(6): 351-355. [5] 倪秀輝, 馬慶鋒, 王芳. 基于MS5534B的微功耗氣壓數(shù)據(jù)采集模塊 [J]. 國外電子元器件, 2008(6): 49-51. [6] Intersema Sensoric SA. MS5534B barometer module data sheet [[EB/OL]. (2005-02-28)[2016-10-16]. http: ∥www.intersema.ch. [7] 沈建華, 楊艷琴, 翟驍曙. MSP430系列16位超低功耗單片機原理與應(yīng)用 [M]. 北京: 清華大學(xué)出版社, 2004: 43-87.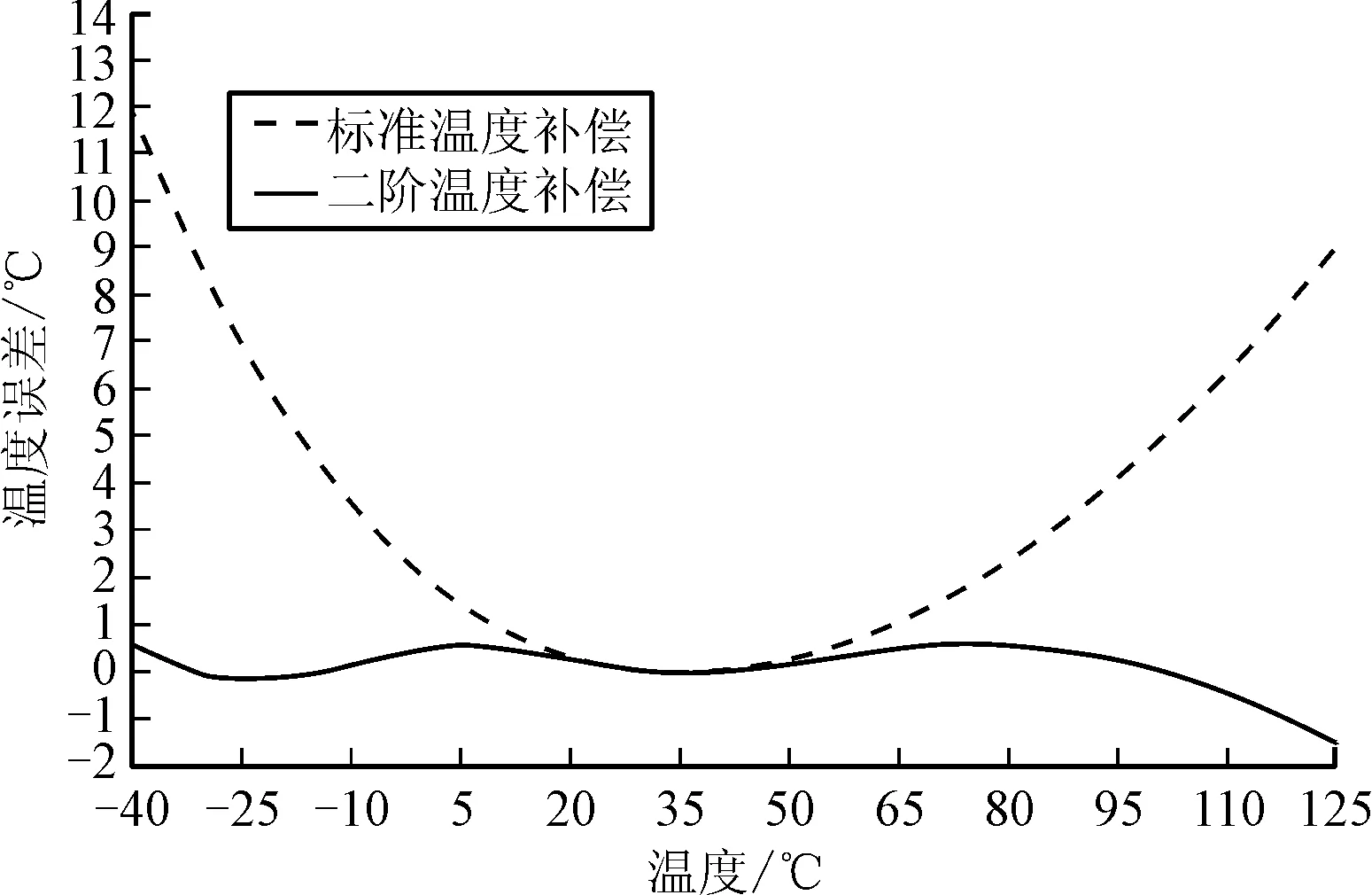
2.2 大氣壓濾波設(shè)計
2.3 大氣壓高度轉(zhuǎn)換設(shè)計
3 試驗驗證
4 結(jié)論
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
