基于BP神經網絡的空空導彈攻擊大機動目標攻擊區仿真研究
2017-05-03 00:56:16孟博
彈箭與制導學報 2017年4期
孟 博
(中國空空導彈研究院, 河南洛陽 471000)
0 引言
空空導彈攻擊區是決定導彈發射的前提條件,也是導彈作戰性能的綜合體現[1]。通過靶試確定攻擊區的方法成本高、周期長、難實施。因此對攻擊區仿真計算的研究顯得尤為重要。
空空導彈攻擊區的計算方法主要有以下3種:理論計算法、擬合法和插值法。理論計算法建立導彈的數學模型,解算微分方程組得到攻擊區,雖精度高,但實時性較差;擬合法擬合飛行條件和攻擊區得到兩者之間的多項關系式,實現攻擊區的實時解算,易于工程應用,但精度較低;插值法將已知條件和攻擊區數據裝入機載火控計算機,根據實際條件進行插值計算,需較大的存儲容量才能保證解算精度[2]。
攻擊區是多種飛行參數的復雜非線性函數,利用傳統建模方法難以實現精確解算。神經網絡可通過非線性映射實現復雜函數關系的逼近,且無需建模對象的內部結構和參數[3-4]。目前國內已開展了利用神經網絡計算攻擊區的研究[5-6],但目標僅小幅機動或不機動,鮮見適用于目標大機動的神經網絡解算攻擊區方法。文中利用最常用的BP(back-propagation)神經網絡,基于導彈數學模型仿真的攻擊區數據,建立純BP網絡和改進BP網絡,并進一步將改進BP網絡與插值法相結合,實現目標不機動和大機動條件的攻擊區計算。
1 空空導彈攻擊區計算原理
攻擊區是空空導彈發射的重要依據,與機載火控系統、空中態勢、目標特性等因素密切相關。影響攻擊區的主要參數有載機高度/速度、目標高度/速度、目標水平/垂直機動、目標水平/垂直進入角和導彈水平/垂直離軸角,即有:
(1)
式中:Rmax、Rmin分別為攻擊區的最大和最小發射距離;Hm、Ht分別為載機和目標海拔高度;Vm、Vt分別為載機和目標速度;Nz、Ny分別為目標水平和垂直機動;Qz、Qy分別為目標水平和垂直進入角;φz、φy分別為導彈水平和垂直離軸角。
為了簡化問題,文中取載機和目標處于同一高度,且目標無垂直機動,此時有:
(2)
即由H、Vm、Vt、Nz、Qz、φz確定的一組條件對應此攻擊態勢下的導彈最大和最小攻擊距離。
根據空空導彈動力學、運動學、目標運動學、彈目相對運動、導引頭、自動駕駛儀、制導律、舵機等數學模型,建立導彈的彈道仿真模型,進一步增加距離搜索算法,形成六自由度攻擊區仿真模型。通過輸入彈目相對態勢參數,即可仿真計算對應的最大和最小攻擊距離,作為攻擊區的標準解。
2 BP神經網絡建立
2.1 BP神經網絡原理
BP神經網絡即多層前饋神經網絡,是應用最廣泛的一類神經網絡。BP網絡由輸入層、隱含層和輸出層組成,隱含層可為一層或多層,各層層內神經元之間無任何連接,各層之間形成全向互聯,實現輸入神經元到輸出神經元間的非線性映射。BP網絡結構圖如圖1所示。
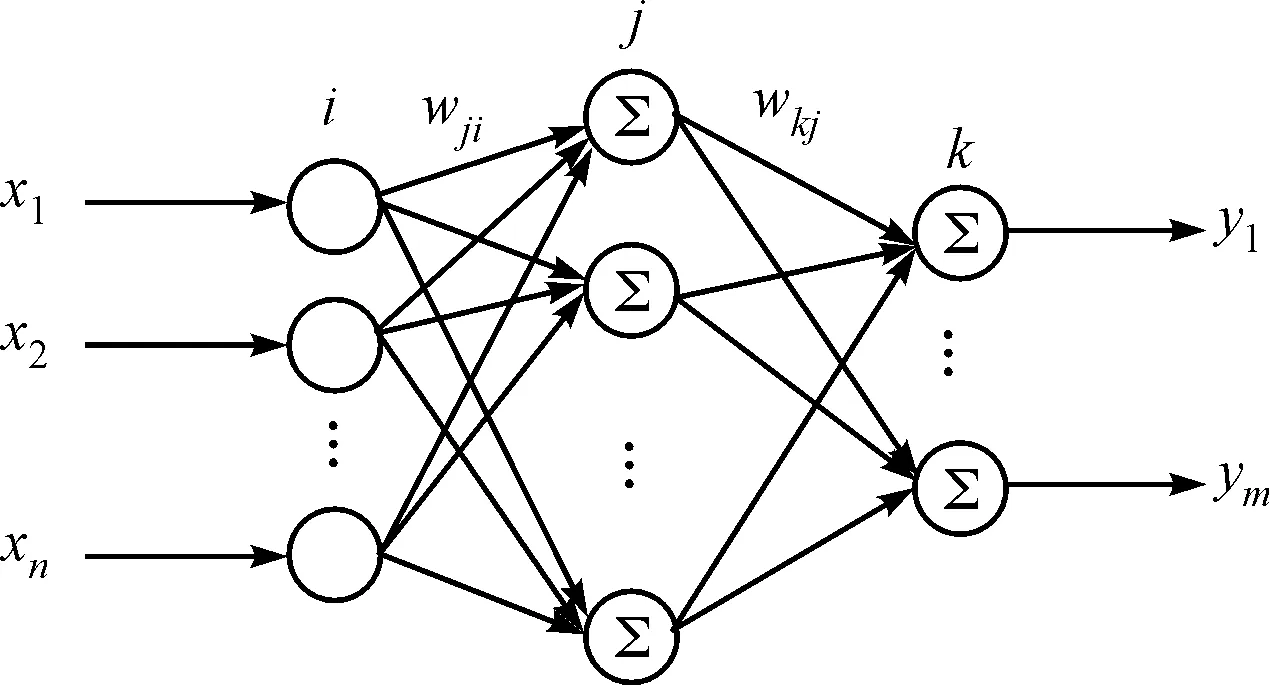
圖1 BP網絡結構圖
BP網絡將“黑箱”模型的輸入、輸出數據作為網絡的輸入和輸出,輸入經正向計算得到的網絡輸出與已知輸出比較,并將誤差反饋,基于梯度最速下降法反向修正網絡各層間的權值,直至網絡輸出與期望輸出的誤差均方值最小。BP網絡訓練時,隱含層輸出為:
(3)
輸出層輸出為:
(4)
式中:n、h、m分別為輸入層、隱含層和輸出層的神經元數;xi、yj、zk分別為輸入層輸入、隱含層輸出和輸出層輸出;ωji、θj分別為輸入層神經元與隱含層神經元的網絡權值、閾值;ωkj、θk分別為隱含層神經元與輸出層神經元的網絡權值、閾值。
當網絡期望輸出為qk,則誤差為:
(5)
網絡誤差反向傳播修正權值,權值按誤差梯度變化的反方向調整,使網絡逐漸收斂。輸出層和隱含層的權值修正公式為:
(6)
式中μ為學習因子。
BP網絡不斷反復進行學習、訓練與權值調整,直至誤差滿足要求或達到規定的訓練次數為止。
2.2 改進BP算法
由于傳統BP算法存在易陷入局部極小點、外推能力弱等不足,實際應用中產生了各種BP改進算法,文中采用數值優化技術的快速算法——Levenberg Marquardt(LM)算法。LM算法中權值和閾值更新公式為:
(7)
式中:xk為第k次迭代的權值和閾值組成的向量;e(x)為誤差;E(x)為誤差指標函數;ΔE(x)為梯度;Δ2E(x)為誤差指標函數E(x)的Hessian函數;J(x)為雅克比矩陣,有:
(8)
于是有:
Δx=-[(J(x))TJ(x)+εI]-1J(x)e(x)
(9)
式中:ε為比例系數,常數;I為單位矩陣。
2.3 改進BP網絡插值法

(10)
(11)
3 基于BP神經網絡的攻擊區解算及分析
3.1 BP網絡的設計
BP網絡的訓練即通過輸入-輸出數據對的反復學習,確定滿足要求的網絡結構和參數,若結果不合適,將影響網絡訓練的速度、效果及網絡外推能力。
理論已證明,在不限制隱含層神經元數的前提下,3層的BP網絡可以任意精度逼近一個非線性映射。因此文中的BP網絡結構為輸入層+一個隱含層+輸出層。
由式(2)可知,決定空空導彈攻擊區最大和最小攻擊距離的主要參數為高度、載機速度、目標速度、目標水平機動、目標水平進入角和導彈水平離軸角。因此,文中的BP網絡輸入層為6個神經元,輸出層為2個神經元。由于改進BP網絡-插值法利用目標水平進入角作為插值依據,其對應的BP網絡輸入層神經元個數為5,輸出層神經元個數不變[8-9]。
BP網絡隱含層神經元個數根據經驗公式(12)確定,后根據訓練效果進行調整。
(12)
式中:n為隱含層神經元個數;ni為輸入層神經元個數;no為輸出層神經元個數;c為1~10之間的常數。
文中BP網絡隱含層和輸出層傳遞函數均為雙曲正切S型傳遞函數。由于網絡輸入、輸出的參數類型和取值范圍各不相同,造成參數變化幅度較大,若直接利用這些數據訓練網絡,則會引起神經元過飽和,影響網絡性能。文中將攻擊區訓練的輸入-輸出數據統一進行歸一化處理,可有效利用傳遞函數特性,也可避免奇異數據的影響,加快網絡收斂速度。
3.2 基于不同BP網絡的攻擊區解算與分析
基于以上確定的BP網絡結構和參數,文中分別利用純BP網絡、改進BP網絡(LM算法)和改進BP網絡-插值法進行空空導彈的攻擊區解算。
用于BP網絡訓練的輸入樣本為不同飛行條件組合形成的攻擊條件,各飛行條件取值范圍見表1,純BP網絡和改進BP網絡的輸入為全參數的2 376個組合條件,改進BP網絡-插值法的輸入不含目標水平進入角,其輸入為198個組合條件。利用導彈數學模型進行仿真,得到對應條件下攻擊區最大和最小距離作為網絡輸出樣本。利用這些輸入和輸出數據分別對純BP網絡、改進BP網絡和改進BP網絡-插值法進行訓練。
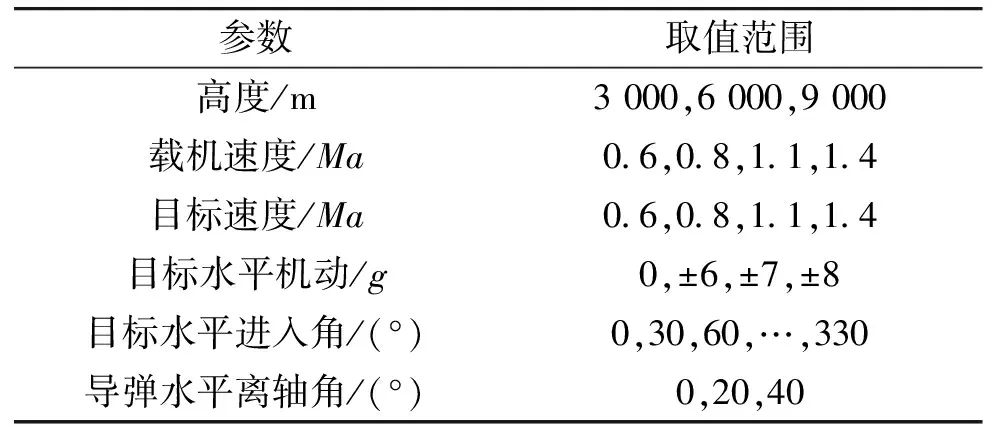
表1 BP網絡訓練的飛行條件取值表
網絡訓練完成后,選取訓練樣本外的飛行條件及仿真得到的對應攻擊區數據對3種BP網絡進行性能測試與驗證。文中用導彈的超界發射概率Pob、失機發射概率Pml和平均發射成功概率P評價空空導彈攻擊區的解算精度,通常要求Pob和Pml均小于15%[5-6]。攻擊區測試飛行條件見表2,純BP網絡、改進BP網絡(LM算法)和改進BP網絡-插值法解算攻擊區的精度比較結果和整體比較結果分別見表2和圖2[10]。

表2 不同BP網絡的攻擊區解算精度比較
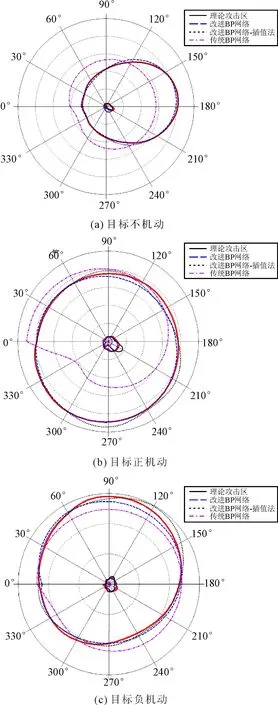
圖2 攻擊區解算精度對比圖
結果表明,在目標不機動和大機動時,改進BP網絡和改進BP網絡-插值法的攻擊區解算精度均高于純BP網絡,且滿足攻擊區解算精度要求;在超界發射概率方面,改進BP網絡效果較好,而在失機發射概率方面,改進BP網絡-插值法性能更佳;總體性能方面,改進BP網絡-插值法更優。
4 結論
攻擊區是空空導彈作戰的重要依據,攻擊區計算與載機、目標、態勢、環境等因素存在復雜的非線性關系,當目標做大機動時,這種關系將更為復雜。文中在分析導彈攻擊區計算原理與影響因素的基礎上,利用神經網絡自主學習攻擊區解算的內在關系,考慮影響攻擊區的最主要因素,將神經網絡與插值法相結合,分別設計了純BP網絡、采用LM算法的改進BP網絡和改進BP網絡-插值法。利用導彈六自由度數學模型仿真得到攻擊區標準解,對3個BP網絡進行了目標不機動和大機動條件的訓練和測試驗證。結果表明,在目標不機動和大機動時,改進BP網絡和改進BP網絡-插值法各有優勢,且均滿足攻擊區解算精度要求;總體性能方面,改進BP網絡-插值法更優。
空空導彈是現代空戰的重要裝備,在戰機稍縱即逝的戰場,及時準確判斷攻擊區范圍并先敵攻擊是制勝關鍵。文中針對目標大機動情況設計了基于BP神經網絡的攻擊區解算算法,可有效計算目標在不機動和大機動時的攻擊區,有利于增強導彈對高機動目標的攻擊效果,進一步提高導彈的作戰效能,在現代日益嚴酷的空戰條件下具有重要的軍事價值和現實意義。
參考文獻:
[1] 吳文海, 周思羽, 高麗, 等. 基于導彈攻擊區的超視距空戰態勢評估改進 [J]. 系統工程與電子技術, 2011, 33(12): 2679-2685.
[2] 付書堂, 章惠君. 空空導彈攻擊區高精度快速計算方法 [J]. 科學技術與工程, 2012, 12(27): 7074-7077.
[3] ASENSIO J, CHEN Wenjie, TOMIZUKA M. Feedforward input generation based on neural network prediction in multi-joint robots [J]. Journal of Dynamic Systems, Measurement, and Control, 2014, 136(3): 031002-1-031002-9.
[4] HARL Nathan, RAJAGOPAL Karthikeyan, BALAKRISHNAN S N. Neural network based modified state observer for orbit uncertainty estimation[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(4): 1194-1209.
[5] 王凱, 李望西, 軒永波. 基于BP神經網絡的空空導彈攻擊區解算及其仿真 [J]. 彈箭與制導學報, 2010, 30(1): 75-77.
[6] 王海濤, 佟惠軍, 王洋. 基于改進的BP神經網絡空空導彈攻擊區解算方法 [J]. 電子設計工程, 2014, 22(3): 28-30.
[7] 張列航, 雷蕾, 李研生. BP神經網絡導彈攻擊區火控工作式擬合 [J]. 火力與指揮控制, 2011, 36(12): 177-179.
[8] 王迎春, 王潔, 杜安利, 等. 基于BP神經網絡的動能桿毀傷指標預測模型 [J]. 系統工程與電子技術, 2013, 35(9): 1898-1902.
[9] 孟博, 李榮冰, 劉建業, 等. 基于改進反向傳播算法的跨音速攻角補償修正算法 [J]. 系統工程與電子技術, 2010, 32(12): 2681-2685.
[10] 張平, 方洋旺, 金沖. 空空導彈攻擊區實時解算的新方法 [J]. 彈道學報, 2010, 12(4): 11-14.
