變電站巡檢機器人關鍵技術及其適用性研究
2017-05-04 05:36:40黃禮華張立平
湖北電力 2017年1期
楊 俊,黃禮華,張立平
0 引言
變電站是電力系統中電能傳輸與轉換的樞紐,其變電設備的安全可靠是整個電力系統安全穩定運行的基礎,長期以來國內外電網公司均投入大量的人力、物力資源開展站內設備的運維巡檢作業。
早期的站內設備運維巡檢作業主要采用人工定期巡檢方式,隨著電網規模的不斷擴大及用戶對電網運行穩定性要求的不斷提高,現有人工定檢方式由于勞動強度大,巡檢質量分散,巡檢效率低及容易受惡劣天氣條件干擾等[1],難以滿足當前電網安全穩定運行的需求。
近年來,隨著移動機器人導航控制及模式識別等技術的不斷發展和完善,利用機器人替代人工開展變電站設備智能化運維巡檢作業已成為當前的熱門研究問題之一,國內外各電力企業針對相關關鍵技術開展了大量的試點應用研究,尋求通過智能化作業手段,進一步提升企業生產效率、降低勞動成本,提高供電可靠性。
由于當前各類機器人巡檢技術種類較多,且不同的技術適用場景也有所差異。將機器人巡檢技術應用于變電站時有必要對相關技術的適用性進行評估,使得相關技術應用能更好地匹配站內巡檢業務的應用需求。本文通過對當前主流機器人巡檢關鍵技術進行詳細的對比分析,在充分調研變電站運維業務應用需求的基礎上,提出相關技術能夠承載的業務內容及其實施方案。
1 變電站巡檢機器人研究現狀
20世紀90年代,日本率先開展了500 kV變電站有軌巡檢機器人應用試點,代替人工實現了設備溫度紅外自動測量,其后包括中國、加拿大、巴西在內的多個國家陸續開展了相關技術研究[2],極大擴展了巡檢機器人功能并提升了其智能化程度。
我國變電站巡檢機器人相關技術研究雖然起步較晚但發展較快,相關機器人產品在導航定位、模式識別及智能分析等技術層面已達世界先進甚至領先水平,在部分電網公司得到了較為廣泛的應用。
經過多年的技術革新和換代,現有變電站巡檢機器人已經發展成為融合移動控制、導航及路徑規劃、視覺模式識別、多傳感器融合、電磁兼容、無線傳輸控制及自主充電等眾多技術于一體的智能型系統,利用移動平臺搭載可見光、紅外成像等傳感檢測設備,可實現站內設備外觀、表計讀數、開關位置、紅外測溫等自主檢測識別及順空操作設備狀態的自動校核等功能[3]。
2 變電站巡檢機器人關鍵技術
根據當前機器人技術發展現狀,變電站巡檢機器人所涉及的關鍵技術主要包括移動機構、導航控制、自主充電及無線通信網絡等。
2.1 機器人移動機構
移動機構的選擇關系到運動控制系統的控制策略,是巡檢機器人在變電站路況環境下高速、高精度穩定運行的重要基礎[4]。按照機器人越障方式不同,其移動機構主要包括以下幾類:輪式、履帶式、固定軌道式、仿生腿式及復合式等。
1)輪式機構
輪式機構是日常交通中應用最為廣泛的移動機構,其優點在于結構簡單、控制方便、機動靈活、傳動效率較高,但其地形適應能力相對較差,越障能力及其運行平穩性與驅動輪半徑大小相關。
2)履帶式機構
履帶式機構是工業機械中較為常用的移動機構,具有越障能力強、地面附著能力強、運動平穩等優點,但其結構相對復雜、體積較大、不易轉彎、機動性能相對較差。
3)固定軌道式機構
固定軌道式機構是利用滑軌實現移動機器人的沿軌道運行,其優點在于具有精確的定位控制和多維度移動能力,空間移動范圍廣泛,具有較強的環境適應性,但其運行路徑較為單一,靈活性較差。
4)仿生腿式機構
仿生腿式機構是近年來較為熱門的研究領域,日本本田、索尼公司及美國波士頓動力公司在仿生腿式機構上有著較為前沿的技術研究,其利用多自由度仿生結構使得機器人的運動靈活性及地形環境適應能力得到極大的提高,能夠實現非結構地形中的自主移動。然而,受現階段技術水平限制,當前仿生腿式機構若要實現快速穩定移動,仍然面臨很多技術難題[5],尚無法實現商業化應用推廣。
5)復合式機構
復合式機構通過對輪-履-腿等單一機構的融合,能夠充分發揮各單一移動機構的優點,實現更強的地形環境適應性和運行控制靈活性,但其移動控制較為復雜,且實際使用中需要針對不同的應用場合設計不同的復合模式,其技術通用性相對較差。
2.2 機器人導航控制技術
目前應用于移動機器人的導航控制技術有多種,主要包括:視覺導航、激光反射導航、慣性導航、GPS導航、磁軌道導航及SLAM(Simultaneous Local?ization and Mapping)導航等。
1)視覺導航
視覺導航是通過移動攝像機實現視覺圖像的實時監視和識別,在關聯機器人實際位置的基礎上完成自主導航定位。該方法的優點是獲取信息量大[6],實現成本低,但由于圖像處理計算量大,實時性較差,且容易受到環境光照、煙霧等因素影響,因此常用于與其它導航技術的融合。
2)激光反射光導航
激光反射光導航是利用激光掃描周邊環境,并通過計算反射光的接收時間來推算物體與機器人之間的距離實現導航定位,其優點是平行性好、距離分辨率高,但容易受周圍環境的干擾,測距范圍有限,完全依靠激光實現導航定位比較困難[6]。
3)慣性導航
慣性導航利用慣性元件(如加速度計、陀螺儀等)來測量運動物體的加速度和運動方向,經過積分運算得到速度和位置,其特點是工作過程中不依賴外部信息,但存在誤差累積,需要定期對其累積誤差進行校正。
4)GPS導航
GPS導航是最為常用的導航控制技術,在機器人導航中,一般采用差分GPS導航,但其定位精度受衛星信號影響較大,定位精度相對較低。
5)磁軌道導航
磁軌道導航是早期變電站巡檢機器人應用較多的一種導航方式,通過地面預埋磁條及RFID標簽可實現移動機器人的精確導航定位[7],其優點是技術成熟可靠,定位精度較高,但靈活性較差,移動路徑單一,且后期擴展和維護工作量較大。
6)SLAM導航
SLAM即時定位與地圖構建技術早期主要應用于軍事領域,近年來逐步在機器人領域得到應用。基于激光雷達的Lidar SLAM技術具有導航精度高,環境適應能力強等特點,使其在無人駕駛汽車及智能機器人導航定位中得到了廣泛的應用。但是由于Lidar雷達的造價較高,且在使用前需制定精確的電子地圖,一定程度上限制了其應用范圍。
2.3 機器人自主充電技術
變電站巡檢機器人大都采用磷酸鐵鋰電池供電,為滿足巡檢機器人長時間、不間斷工作的供電需求,需要為巡檢機器人設置一套高效、可靠的自主充電解決方案。目前自主充電技術主要有接觸式自主充電、光能自主充電及非接觸式自主充電等。
1)接觸式自主充電
接觸式自主充電利用導航定位技術實現機器人本體及固定接口之間的自動定位和連接,在采用激光定位的情況下,其充電接頭之間的定位精度較高,且具備較高的誤差容忍度。
2)光能自主充電
光能自主充電利用太陽能光電轉換實現機器人的自主補能,由于其實現成本低,技術成熟,在能源行業得到了較為廣泛的應用,但當前太陽能光電轉換效率較低,采光板整體面積較大,難以應用于移動機器人自主充電。
3)非接觸式自主充電
非接觸式自主充電是通過無線感應方式實現能量的傳輸,從實現原理來看,當前主要有電磁感應、磁共振、微波無線充電等三種方式。非接觸式充電能有效避免自主式充電的接口磨損及污穢問題,且實現簡單,但當前各類非接觸式自主充電功率較小,因此一般應用于手機、電動牙刷等小型家領域。
2.4 機器人無線通信網絡
由于變電站巡檢機器人在進行站內作業時需要時刻與后臺系統進行信息交互,為保障巡檢機器人的正常運行,必須提供高速、穩定、可靠的無線通信傳輸通道。根據當前無線通信傳輸技術的發展水平,可提供高帶寬的無線通信技術主要有Wi-Fi、UWB及Li-Fi等。
1)Wi-Fi
Wi-Fi采用802.11協議,屬于短距離無線載波通信技術,其優點是覆蓋范圍廣、傳輸速率快,可在百米范圍內提供11~600 Mbps的數據傳輸速率[8],且支持無線橋接和Mesh組網傳輸,但其運行功耗較高。
2)UWB(Ultra Wide Band)
UWB采用無載波通信技術,其發射功率較低,具有高量級頻帶寬和極高的通信安全性,可實現10 m范圍480 Mbps的數據傳輸率[8],但其終端支持較少,傳輸距離較短,主要應用于移動機器人室內定位。
3)Li-Fi(Light Fidelity)
Li-Fi是一種采用光譜而非無線電波作為載體的數據傳輸方式,具有綠色環保、不占用無線電頻帶資源且保密性高等優點,可在短距離內實現1 000 Mbps以上的傳輸速率[9],但該技術當前仍然處于研究階段,尚未出現正式應用和推廣。
3 站內運維巡檢業務應用需求
站內一二次設備運維檢修業務主要包括巡檢、倒閘操作、事故處理等,其中巡檢作業包括設備日常巡檢、設備例行試驗及設備診斷性試驗3類。對于倒閘操作可通過自動化技術改造采用電動操作機構解決。對于事故處理、設備例行試驗及設備診斷性試驗,由于其涉及因素眾多且操作復雜,需要大量憑借專業人員相關經驗,現階段智能化作業手段尚不能滿足操作需求。
對于設備日常巡檢,根據《輸變電設備狀態檢修試驗規程》要求,需通過看、聽、嗅等方式檢查各設備外觀、開關位置、表計讀數、節點溫度、聲響及振動、運行環境等,其巡視周期短,其巡檢項目及要求如表1所示。
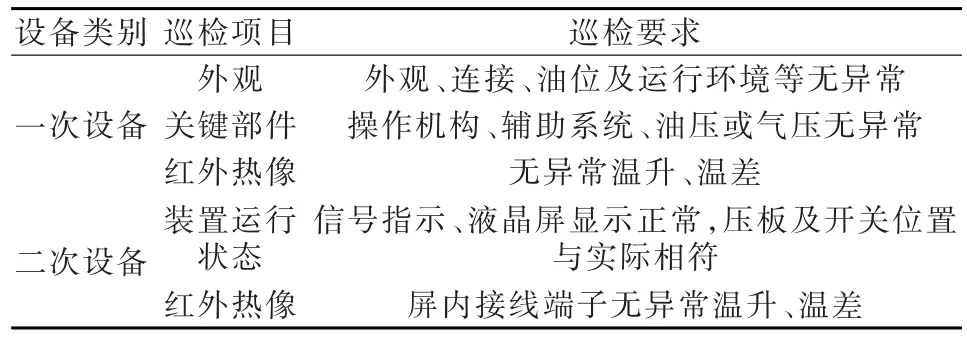
表1 變電站主要設備巡檢項目表Tab.1 Table of the main inspection equipment in substation
從表1可知:站內日常巡檢整體技術要求不高,但由于設備分布較廣,且數量眾多,適宜采用智能機器人技術代替人工完成此部分巡檢作業。
4 相關技術適用性評估
1)機器人移動機構適用性評估
仿生腿式結構的相關驅動控制及工藝制造技術現階段尚不成熟,短期內無法實現商業化和大規模推廣應用。
履帶式及復合式結構雖然具有較強的越障和環境適應能力,但存在傳動效率較低,控制相對復雜,若要實現連續越障還需對其履帶結構或復合模式進度調整。對于變電站內應用而言,其室外巡檢通道大部分地勢平坦,而室外至室內的巡檢通道擺渡目前依靠履帶式或復合式結構實現較為困難。
固定軌道式結構因其空間移動范圍廣泛,能夠實現站內設備的三維立體巡檢,但由于其需要預先架設空間軌道,且后期擴展、調整施工繁瑣,因此適合在室內依墻體或天花板布置,可適應站內二次設備及屏柜、換流站內閥塔等設備的巡檢作業需求。
對于輪式結構,雖然其環境適應性相對較差,但其技術相對成熟,運行靈活,控制簡單,整體實現成本低,通過對巡檢通道進行簡單的改造即可實現全區域行走,適合對站內室外設備的巡檢作業。
2)機器人導航控制技術適用性評估
對于變電站巡檢機器人,由于其需要定點巡檢各設備開關表計讀數,導航定位精度要求較高,因此較為可行的導航技術有激光反射導航、磁導航及SLAM導航等。激光反射導航雖然測距精度較高,但存在檢測盲區;磁導航雖然實現成本較低,定位較為精準,但運行方式不靈活;而基于Lidar SLAM的導航控制技術由于其定位精度極高、技術成熟可靠,當前高精度激光雷達已能達到厘米級定位精度,能夠適應變電站巡檢應用需求。
3)機器人自主充電技術適用性評估
對于變電站巡檢機器人,由于其體積受限,充電功率要求較大,因此光能及非接觸自主充電技術均無法滿足站內巡檢機器人的應用需求。而當前基于激光導航的接觸式自主充電技術發展應用較為成熟,充電功率大,且采用鈦合金材料的接頭基本避免了因接頭污穢導致的充電失敗問題,能夠滿足變電站巡檢機器人對充電環境、性能的技術要求。
4)機器人無線通信網絡技術適用性評估
由于高清圖像數據傳輸對無線網絡的帶寬要求較高,當前 Wi-Fi、UWB、Li-Fi均能提供 10 Mbps以上的傳輸帶寬。但是由于UWB傳輸距離較近,若要實現變電站全區域覆蓋需要布置較多的中繼節點,而Li-Fi技術則由于技術發展尚不成熟,其傳輸距離和實現方案仍有待完善。Wi-Fi技術由于其發展較為成熟,終端支持豐富,傳輸速率較高、信號覆蓋面廣,且對于變電站內而言設備的電源供應充裕,能很好地彌補Wi-Fi技術高功耗的缺點,較為適合作為站內巡檢機器人的無線通信傳輸的需求。
5 機器人巡檢技術應用方案
根據上述巡檢機器人關鍵技術及其適用性評估,結合變電站日常巡檢應用需求,現階段可采用輪式、固定軌道移動機構、Lidar SLAM導航、接觸式自主充電及Wi-Fi無線通信傳輸等技術實現變電站巡檢機器人的應用,其系統架構如圖1所示。
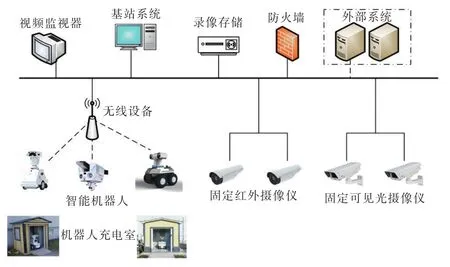
圖1 變電站巡檢機器人系統架構圖Fig.1 Substation inspection robot system architecture diagram
1)對于變電站內各室外一次設備,可以發揮輪式機構的靈活性優勢,設置各一次設備專用機器人巡檢通道,并通過機器人搭載紅外、可見光、感煙器、拾音器等傳感器設備實現設備運行溫度、外觀、表計讀數、噪聲分析等智能化巡檢作業。
2)對于換流站內各一次設備,其交流場部分可沿用變電站內配置方案,其直流換流閥廳,由于設備布置及日常巡檢位置較高,適宜采用固定軌道機器人開展智能巡檢,通過閥廳墻壁,能方便地實現固定軌道敷設,且不影響現有其它業務的正常開展。對于閥廳內固定軌道巡檢機器人無法到達的巡視盲區可采用固定攝像頭及固定紅外傳感器等進行補充覆蓋。
3)對于變電站/換流站內各室內二次設備,可采用天花板吊頂固定滑道,并配置可伸縮式紅外及可見光傳感器,實現各設備屏柜的定點測溫,液晶屏參數、裝置壓板投退狀態及表計識別等功能。
為保障上述巡檢機器人應用方案的正常開展,各站需要結合自身實際情況對相關外部環境進行適應性改造。對于室外一次設備巡檢,需要建立滾輪移動機器人行走通道,消除通道上的高差及各類障礙,并通過增加反光鏡或固定檢測裝置等手段消除機器人巡視盲區;對于各類端子箱或二次設備屏柜,若需實現屏內接線端子的紅外測溫,則需要改造現有開關門方式,將其改為自動電控模式。
6 結語
目前,變電站巡檢機器人已經在國內各電網公司中得到了一定的應用,從整體情況來看,利用智能機器人能夠有效代替人工完成站內一二次設備的日常巡檢,且其巡檢效率高,具有較好的經濟效益。但是從整體來看,當前巡檢機器人智能化程度仍顯不足,模式識別算法及綜合診斷分析能力仍有待提高。另一方面,早期的變電站設備均按傳統模式布置,未考慮機器人巡檢的應用需求,因此后期在設備選型及布置上也需要進行重點研究。
[參考文獻](References)
[1]王凱.變電站巡檢機器人關鍵技術及系統的研究與實現[D].成都:電子科技大學,2015.WANG Kai.Research and implementation on the key technologies and system of substation inspection robot[D].Chengdu:University of Electronic Science and Technology of China,2015.
[2]楊旭東,黃玉柱,李繼剛,等.變電站巡檢機器人研究現狀綜述[J].山東電力技術,2015,42(1):30-34.YANGXudong,HUANGYuzhu,LIJigang,etal.Re?search status review of robots applied in substations for equipment inspection[J].Shandong Electric Power,2015,42(1):30-34.
[3]周立輝,張永生,孫勇,等.智能變電站巡檢機器人研制及應用[J].電力系統自動化,2011,35(19):85-88.ZHOU Lihui,ZHANG Yongsheng,SUN Yong,et al.Development and application of equipment inspection robot for smart substations[J].Automation of Electric Power Systems,2011,35(19):85-88.
[4]朱興柯,葉飛,李斌,等.變電站巡檢機器人運動控制系統研究[J].機電信息,2014(30):122-124.ZHU Xingke,YE Fei,LI Bin,et al.Research on motion control system of substation inspection robot[J].Mechanical and Electrical Information,2014(30):122-124.
[5]郭云東.輪履復合式巡檢機器人機械系統研究[D].濟南:山東科技大學,2015.GUO Yundong.Mechanical system research of patrol robot with wheel-track[D].Jinan:Shandong Univer?sity of Science and Technology,2015.
[6]趙坤.變電站智能巡檢機器人視覺導航方法研究[D].北京:華北電力大學,2014.ZHAO Kun.Research on visual navigation of intel?ligent patrol robot in the substation[D].Beijing:North China Electric Power University,2014.
[7]蔚然,戚琳,戚矛,等.智能機器人巡檢系統在500 kV文都變的應用[J].電工技術,2014(6):9-10.WEI Ran,QI Lin,QI Mao,et al.Application of in?telligent robot inspection system in 500 kV Wendu substation[J].Electric Engineering,2014(6):9-10.
[8]苗志勇.短距離無線通信技術和其在物聯網中的應用[J].信息技術與信息化,2015(1):38-39.MIAO Zhiyong.Short distance wireless communica?tion technology and its application in internet of things[J].Information Technology &Informatization,2015(1):38-39.
[9]張振中.Li-Fi可見光無線通信技術分析[J].湖南郵電職業技術學院學報,2015(3):19-21.ZHANG Zhenzhong.Discussion on light fidelity tech?nology[J].Journal of Changsha Telecommunications and Technology Vocational College,2015(3):19-21.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
工業設計(2016年12期)2016-04-16 02:52:00
河南電力(2015年5期)2015-06-08 06:01:45
設備管理與維修(2015年12期)2015-04-09 06:57:00
水電站機電技術(2014年1期)2014-09-26 11:59:53
